三相感应电动机
三相感应电动机 实验报告
三相感应电动机实验报告三相感应电动机实验报告引言:三相感应电动机是一种常见的交流电动机,广泛应用于工业生产和家庭用电。
本次实验旨在通过对三相感应电动机的实际操作和测量,探究其工作原理和性能特点。
一、实验目的本次实验的主要目的是:1. 了解三相感应电动机的基本结构和工作原理;2. 学习使用电动机测试仪器进行电机性能参数的测量;3. 掌握电动机的启动、制动和调速方法。
二、实验器材和仪器1. 三相感应电动机:型号XXX,额定功率XXX;2. 电动机测试台:包括电动机启动、制动和调速装置;3. 电动机测试仪器:包括电流表、电压表、功率表等。
三、实验步骤1. 连接电动机和测试仪器:将电动机的三相线连接到电动机测试台上的对应接线端子上,接上电流表、电压表和功率表等测试仪器;2. 启动电动机:按下电动机测试台上的启动按钮,观察电动机的启动过程和运行状态;3. 测量电机参数:在电动机运行时,通过测试仪器测量电机的电流、电压和功率等参数,并记录下来;4. 制动电动机:按下电动机测试台上的制动按钮,观察电动机的制动过程和停止状态;5. 调速电动机:通过电动机测试台上的调速装置,对电动机进行调速操作,观察电动机的转速变化和运行情况。
四、实验结果和分析1. 电机参数测量结果:根据实验测量数据,计算得到电动机的额定电流、额定功率和功率因数等参数,并进行分析;2. 电动机启动性能分析:观察电动机的启动过程和启动时间,分析电动机的起动性能;3. 电动机制动性能分析:观察电动机的制动过程和制动时间,分析电动机的制动性能;4. 电动机调速性能分析:通过调速装置对电动机进行调速操作,观察电动机的转速变化和调速效果,分析电动机的调速性能。
五、实验结论通过本次实验,我们对三相感应电动机的工作原理、性能特点和操作方法有了更深入的了解。
实验结果表明,该电动机具有较好的启动性能、制动性能和调速性能,能够满足不同工况下的工作要求。
六、实验总结本次实验通过实际操作和测量,加深了对三相感应电动机的理论知识的理解和应用。
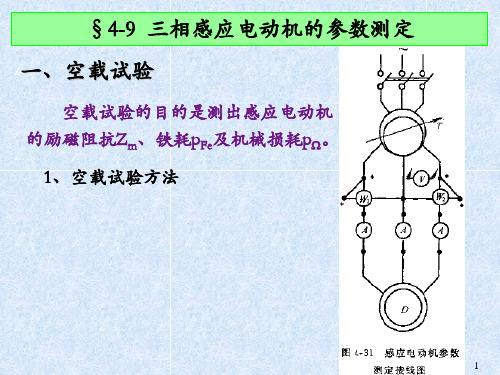
4.9三相感应电动机的参数测定
m1I
2 0
0
X 0 Z02 r02
rm
pFe
m1I
2 0
X m X 0 X1
r
0
空载等效电路
5
§4-9 三相感应电动机的参数测定
二、短路(堵转)试验
短路试验的目的是测出感应电动机的短路阻抗Zk、定 子和转子铜耗pcu1、 pcu2。
1、短路试验方法
6
§4-9 三相感应电动机的参数测定
如图接线, 并将转子堵转。调节U1使U1约为0.4UN 使定子电流从1.2 IN逐渐减少到0.3 IN 为止,测出对应的 短路电压Uk,短路相电流Ik和短路试验输入功率Pk。从 而得到图示短路试验特性。
转子电抗折算值: X 2 0.97 X k 0.97 3.71 3.6 定子漏电抗: X1 X k X 2 3.71 3.6 0.11 励磁电抗: X m X0 X1 40.44 0.11 40.33
12
2
§4-9 三相感应电动机的参数测定
2、机械损耗与铁耗的分离
空载损耗包括定子铜耗、铁耗、机械损耗和附加损 耗。在忽略附加损耗时,铁耗+机械损耗为:
P0 P0 m1I02r1 pFe p
由于铁耗近似与U1的平方过程中,可以看作近似 不变。因此:
短路阻抗:
ZK
UkN I N
Uk 3Ik
120 3.83 3 18.1
短路电阻:
rk
PkN
m1I
2 N
920 3 18.21
0.936
短路电抗: X k Zk2 rk2 3.71
转子电阻折算值:r2 rk r1 0.936 0.5 0.436
11
§4-9 三相感应电动机的参数测定
电机学三相感应电动机的起动

的 A 点上稳定运行,起动过程结束。
3
图 4-12-4 转子串电阻起动接线原理图
图 4-12-5 转子串电阻器逐段切除的起动过程
绕线型感应电动机的优点是起动特性好,适用于起动困难的机械,如吊车、铲土机等。 缺点是电机的结构复杂,维护不方便,价格也比较高。
动时(s=1)达到最大值, R2 应为
R2 =
R12 ( X1σ X 2σ )2
R12
X
2 k
(4-12-6)
由此不难得到所需外串电阻为
Rst
R12
X
2 k
keki
R2
Xk keki
R2
(4-12-7)
式中 X k 为电动机的堵转电抗;ke 和 ki 分别为电压比和电流比。当外串电阻 Rst 满足式(4-12-7) 时,电动机的Te -s 曲线为图 4-12-5 中曲线 1,这时起动电流比较小,而起动转矩为电动机
直接起动的优点是设备简单,操作方便,起动转矩大;缺点是起动电流大。直接起动仅 适合于电动机容量小或电网容量大、起动电流不至于使电网电压波动太大的场合。
2. 降压起动
若电网容量不够大,无法承受电动机起动电流时,需要降压起动。常用的降压起动法有
星——三角起动法、自耦变压器法、电力电子降压法、定子串接电抗器法、定子串接磁控饱
这时定子绕组为△形接法,相电压就等于线电压,达到降压的目的。
现比较 、△两种接线电源电流的变化。△形接法直接起动时,电源电流为相电流的
3 倍,即
I ()
3 U1N Zk
(4-12-1)
三相感应电机的结构组成

三相感应电机是一种常见的交流电机,通常由以下几个部分组成:
1. 定子:定子是电机的固定部分,由硅钢片叠压而成,上面绕有三相绕组。
绕组的接法可以是星型或三角形,根据电机的功率和电压等参数来确定。
2. 转子:转子是电机的旋转部分,由硅钢片叠压而成,上面绕有鼠笼式绕组或绕线式绕组。
鼠笼式绕组是将铜条插入转子槽中,两端用短路环连接起来;绕线式绕组则是将铜线绕在转子槽中,通过电刷和滑环与外部电源相连。
3. 端盖:端盖是电机的两端盖子,用于保护电机内部的绕组和轴承等部件。
4. 轴承:轴承是支撑转子的部件,通常采用滚动轴承或滑动轴承。
5. 机座:机座是电机的外壳,用于支撑和固定定子和转子等部件。
6. 风扇:风扇是电机的散热部件,用于冷却电机。
以上是三相感应电机的基本结构组成,不同型号和规格的电机可能会有所不同。
三相感应电动机原理

三相感应电动机原理
在静态阶段,三相感应电动机的定子绕组中流过的电流称为激励电流,它产生的磁场称为激励磁场。
当三相交流电源接通时,电流通过定子绕组,形成一个旋转磁场。
这个磁场的方向和大小跟电流的方向和大小有关。
定
子绕组产生的磁场称为主磁场。
在动态阶段,定子绕组的旋转磁场和转子(也称为电机转子)上的导
体相互作用,引起了感应电动势。
感应电动势的大小和方向由电机转子上
的导体位置和速度决定。
感应电动势在导体上形成了感应电流,这个电流
产生的磁场称为感应磁场。
感应磁场的方向和主磁场的方向相对,从而导
致了转子上的导体受到力的作用。
这个力使转子开始旋转。
由于感应电动势的大小与转子上的导体位置和速度成正比,转子开始
旋转后感应电动势的大小也会增大。
当转子速度接近同步速度时,感应电
动势的大小和主磁场的大小相等。
这时,转子上的电流和主磁场的方向相对,力的作用消失,转子达到稳定运转状态。
在转子旋转的过程中,电机的速度会稍微慢于同步速度,这称为滑差。
滑差的大小影响着电动机的输出功率和效率。
当负载变化时,滑差的大小
会发生变化,电机会自动调节滑差,使得输出功率和效率保持在最佳状态。
以上就是三相感应电动机的工作原理。
通过电磁感应的作用,将电能
转化为机械能,实现了电动机的运转。
在实际应用中,三相感应电动机广
泛应用于工业生产、交通运输和家用电器等领域。
三相异步电动机分类
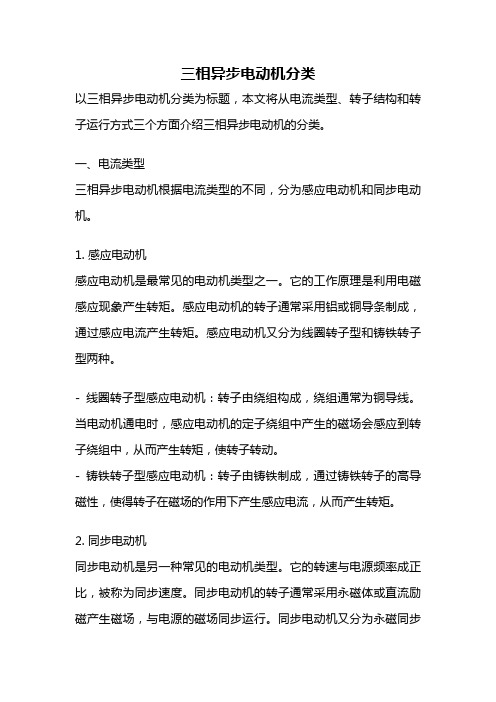
三相异步电动机分类以三相异步电动机分类为标题,本文将从电流类型、转子结构和转子运行方式三个方面介绍三相异步电动机的分类。
一、电流类型三相异步电动机根据电流类型的不同,分为感应电动机和同步电动机。
1. 感应电动机感应电动机是最常见的电动机类型之一。
它的工作原理是利用电磁感应现象产生转矩。
感应电动机的转子通常采用铝或铜导条制成,通过感应电流产生转矩。
感应电动机又分为线圈转子型和铸铁转子型两种。
- 线圈转子型感应电动机:转子由绕组构成,绕组通常为铜导线。
当电动机通电时,感应电动机的定子绕组中产生的磁场会感应到转子绕组中,从而产生转矩,使转子转动。
- 铸铁转子型感应电动机:转子由铸铁制成,通过铸铁转子的高导磁性,使得转子在磁场的作用下产生感应电流,从而产生转矩。
2. 同步电动机同步电动机是另一种常见的电动机类型。
它的转速与电源频率成正比,被称为同步速度。
同步电动机的转子通常采用永磁体或直流励磁产生磁场,与电源的磁场同步运行。
同步电动机又分为永磁同步电动机和励磁同步电动机两种。
- 永磁同步电动机:转子采用永磁体制成,通过永磁体的磁场与定子产生的磁场同步运行。
永磁同步电动机具有高效率和较高的功率因数特点。
- 励磁同步电动机:转子通过直流励磁产生磁场与定子产生的磁场同步运行。
励磁同步电动机广泛应用于大型发电机组和工业领域。
二、转子结构根据转子结构的不同,三相异步电动机可以分为鼠笼转子型和深槽转子型两种。
1. 鼠笼转子型鼠笼转子型是最常见的转子结构,也是感应电动机最常用的转子结构。
它的转子由许多平行的铜或铝导体条组成,外形类似于一个大鼠笼,因此得名鼠笼转子。
鼠笼转子具有结构简单、制造成本低和运行可靠等优点。
2. 深槽转子型深槽转子型转子上有许多深槽,通常由铜或铝导体填充而成。
深槽转子型转子的优点是起动转矩大、转速波动小,适用于某些特殊工况,如起动大负载或恶劣环境。
三、转子运行方式根据转子运行方式的不同,三相异步电动机可以分为单相感应电动机和三相感应电动机。
三相交流伺服电机工作原理
三相交流伺服电机工作原理伺服电机是一种精密控制电机,主要用于需要精确定位和速度控制的应用中。
与普通的电机相比,伺服电机具有更高的转速稳定性、更高的精度和更快的响应速度。
伺服电机常用于工业机械、机器人、自动化设备等领域。
具体的工作原理如下:1.三相交流感应电动机三相交流感应电动机通常由定子和转子两部分组成。
定子是由三个相互平衡的绕组组成,每个绕组与电源相连,形成三个相位。
转子则是通过电磁感应产生的磁场与定子的磁场相互作用而转动。
在工作过程中,当三相电源通电时,产生的交流电流会在定子绕组中产生旋转磁场,而这个旋转磁场会感应出转子中的电流,从而产生转矩,使转子开始旋转。
2.反馈系统为了实现精确的位置和速度控制,伺服电机通常配备了反馈系统,以获取电机的实际状态信息。
反馈系统一般采用光电编码器、霍尔传感器等装置来检测转子的位置和速度。
光电编码器是一种通过光电原理来感应转子位置的装置。
它通常由一对光电探测器和一个光栅盘组成。
光栅盘上有许多细小的透明和不透明的条纹,当光栅盘随着转子旋转时,光电探测器会感应到由透明和不透明条纹形成的光信号变化,从而测量出转子的位置和速度。
霍尔传感器是一种基于霍尔效应的设备,能够检测磁场的变化。
它通常与转子磁极组合使用,当转子旋转时,磁场会随之变化,霍尔传感器会通过感应磁场的变化来测量转子的位置和速度。
3.电机控制器电机控制器是伺服电机的核心部件,它基于来自反馈系统的信息,通过控制电流的大小和方向来控制电机的转子位置和速度。
电机控制器通常由一块微处理器实现,其内部集成了控制算法和反馈调节功能。
控制算法通常采用PID控制算法,根据反馈系统返回的误差信号来动态调整控制参数,以实现精确的位置和速度控制。
此外,电机控制器还负责与外部设备进行通信,接收外部接口的指令,并将电机实际状态的信息反馈给外部设备。
总结起来,三相交流伺服电机的工作原理是通过三相交流感应电动机的旋转磁场和反馈系统的信号,配合电机控制器的控制算法和反馈调节功能,实现精密的位置和速度控制。
三相感应电动机的工作原理
三相感应电动机的工作原理三相感应电动机是一种常见的电动机类型,广泛应用于各种工业领域。
它的工作原理基于电磁感应现象,通过三相交流电源产生旋转磁场,从而驱动转子旋转。
本文将详细介绍三相感应电动机的工作原理及其相关知识。
一、三相感应电动机的结构三相感应电动机由定子和转子两部分组成。
定子是由三个相互平衡的线圈组成,每个线圈都被连接到一个相位的交流电源上。
转子是由导体材料制成的,通常是铜或铝。
转子内部有一个短路环,称为“假转子”,它的作用是在电动机启动时提供额外的转矩。
三相感应电动机的工作原理基于电磁感应现象。
当三相交流电源施加在定子上时,会产生一个旋转磁场。
这个旋转磁场的频率等于电源的频率,通常为50Hz或60Hz。
旋转磁场的方向和速度由电源的相位和频率决定。
当旋转磁场与转子相遇时,会在转子中产生感应电流。
这个感应电流会产生一个磁场,与旋转磁场相互作用,从而产生一个转矩,使转子开始旋转。
由于转子中的感应电流是由旋转磁场产生的,因此它的方向和速度与旋转磁场相同。
三、三相感应电动机的启动方式三相感应电动机有两种启动方式:直接启动和星角启动。
1. 直接启动直接启动是最简单的启动方式,它只需要将三相交流电源直接连接到电动机的定子上。
在启动时,电动机会产生一个很大的启动电流,这可能会对电网造成影响。
因此,直接启动只适用于小功率电动机。
2. 星角启动星角启动是一种更复杂的启动方式,它需要一个特殊的启动器来控制电动机的启动过程。
在星角启动中,电动机的定子线圈被连接到一个星形电路中,而不是直接连接到电源。
在启动时,电动机会先以星形连接方式启动,然后在运行时切换到三角形连接方式。
这种启动方式可以减少启动电流,对电网的影响也较小。
四、三相感应电动机的特点三相感应电动机具有以下特点:1. 结构简单,维护方便。
2. 转矩平稳,运行可靠。
3. 转速范围广,适用于不同的负载。
4. 能耗低,效率高。
5. 价格相对较低,成本较低。
五、三相感应电动机的应用三相感应电动机广泛应用于各种工业领域,如机械制造、化工、矿山、冶金、建筑等。
三相感应电动机的电压方程和等效电路
感应电机一般都用作电动机,在少数场合下,亦
有用作发电机的。本章先说明空载和负载时三相
感应电动机内的磁动势和磁场,然后导出感应电
动机的基本方程和等效电路,最后分析它的运行 特性和起动,调速等问题。
5.1 感应电机的结构和运行状态
一、感应电机的结构
定子铁心
定子 定子绕组
(6)电磁转矩和输出转矩
[例5·4] 一台四极、 380V 、三角形联结的感应电动机,其
参数为 R 1=4.47Ω , R ´2 = 3.18Ω , X1σ= 6.7Ω ,
X´2σ= 9.85Ω,Xm= 188Ω, Rm忽略不计。试求该电 动机的最大转矩Tmax及临界转差sm,起动电流Ist 及起动转矩Tst。
由于感应电动机的效率和功率因数都在额定负载附近达到最 大值,因此选用电动机时应使电动机的容量与负载相匹配, 以使电动机经济、合理和安全地使用。
二、工作特性的求取
1. 直接负载法
先用空载试验测出电动机的铁耗、机械损耗和定子电阻,
再进行负载试验求取工作特性。
2.由参数算出电动机的主要运行数据
在参数已知的情况下,给定转差率,利用等效电路求出 工作特性。
感应电动机定、转子耦合电路图
返回
R1
X 1σ
n0
X 2σ
R2
U1
I1
E2
I2 1 s R2 s
m1 , N1kw1 f1
m2 , N 2 kw2 f1
频率归算后感应电动机的定、转子电路图
返回
R1
X1
n0
X2
R2
' I2 1 s R2 s
U1
I1
三相感应电动机
三、结构
与直流电机一样,感应电机也分为三个主要部分:定子、转子和 气隙。
定子的主要部件:定子铁芯、定子绕组、机座和端盖。与直流电 机相比较,有何不同? 励磁绕组、主磁极铁芯、换向极绕组及铁芯、电刷
定子铁芯:是电机磁路的一部分,定子铁芯内圆上均匀开有槽,安 放定子绕组。定子铁芯用0.5mm厚的硅钢片叠压而成。
变转频磁调场速的原转理速即从通而过使改转变子电转机速三也相发绕生组变t 的化2电。4流0 的频t 率3,00来控制旋
两极电机,其磁场的转速也就是同步速与电流频率之间的关系 为n1=60f。磁场转过的机械角度与电流所变化的电角度相等。 磁场旋转的角速度ω与电流变化的角频率ω相等。
如果是四极电机呢?电流变化一个周期,也就是ωt=360º,磁极 在空间上转过多少角度?(观察FLASH)
如果将这p个线圈组全部并联起来,则得到每相最大的并联支路 数,相绕组的感应电动势将最小,但允许通过的相电流将最大; 如果将这p个线圈组全部串联起来,则得到每相最小的并联支路 数,相绕组的感应电动势将最大,允许通过的相电流将最小。
同样可以得到B相和C相的分布。应注意,B相在空间上与A相 互差120度电角度。 蓝色的应为B相。
A1
X1
A2
X2
能否并
如何将两
联?
3.放A相线圈,同一线个圈接极组?下联的相邻的q个线圈串联形成一个线 圈组。得到A1X1和A2X2两个线圈组。
不能并联,尽管每个线圈的感应电动势幅值相同,但有相位差
并联相当于把两个有相位差的电压源并联,会有很大的环流。
串联,有两种可能的联接方式,即顺串,反串。两种都可以吗? 为什么?
S
S
X
X2
N
A2
N
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机设计计算流程说明:本例为陈世坤老师的《电机设计》(第二版)第十章第264至280页的算例。
技术指标:输出功率 P N =2.2kW ,电压 U N =220V (接),相数 m 1=3,频率 f=50Hz , 极对数 p=2,B 级绝缘,连续运行,封闭型自扇冷式,主要性能指标按技术条件JB3074-82的规定。
一 额定数据和主要尺寸1、额定功率P N 2.2103⨯:= 2、额定电压U N 220:= f 50:= U N ϕU N:=3、功电流相数m 13:=I KW P Nm 1U N ϕ⋅ 3.3333=:=4、效率按照技术条件规定选取 η'81%:=5、功率因数按照技术条件规定选取 cos φ'0.82:=6、极对数p 2:=7、定转子槽数q 13:=每极每相槽数选取 定子槽数 Z 12m 1p ⋅q 1⋅:=根据近槽配合原则,转子槽数选取: Z 232:=采用转子斜槽8、定转子每极槽数Z p1Z 12p 9=:=Z p2Z 22p 8=:= 9、确定电机主要尺寸满载电势标幺值由经验公式 K'E 0.0108ln P N1000⎛ ⎝⎫⎪⎭⋅0.013p -0.931+:=计算功率P'K'E P N η'cos φ'⋅⋅ 3.0258103⨯=:=α'p 0.68:=K'Nm 1.10:= K'dp10.96:=B'δ0.67:=n'1450:=根据标准直径最后取 D 10.155:=于是 D i1D 10.64⋅:=取D i10.0992:=取铁心长l t 0.105:=10、气隙的确定取 δ0.3103-⋅:=铁心有效长度 l ef l t 2δ+0.1056=:=转子外径D 2D i12δ-0.0986=:=转子内径先按转轴直径确定 D i20.038:=11、极距τπD i12p ⋅0.0779=:=12、定转子齿距t 1πD i1⋅Z 18.6568103-⨯=:= t 2πD 2⋅Z 29.68103-⨯=:=13、定子绕组采用单层绕组,交叉式,节距1~9,2~10,11~18 14、为了削弱齿谐波磁场的影响,转子采用斜槽,斜一个定子齿距b sk 0.009:=15、设计定子绕组每相串联导体数 N'ϕ1η'cos φ'⋅π⋅D i1⋅A'⋅m 1I KW⋅538.1877=:=取并联支路数 a 11:=可得每槽导体数N's1m 1a 1⋅N'ϕ1⋅Z 144.849=:=为方便?取N s141:=于是每线圈匝数4116、每相串联导体数N ϕ1N s1Z 1⋅m 1a 1⋅492=:=每相串联匝数N 1N ϕ12246=:=17、绕组线规设计初选定子电密J'15106⋅:=定子电流初步估计值I'1I KWη'cos φ'⋅:=导体并绕根数和每根导体截面积的乘积 A's I'1a 1J'1⋅1.0037106-⨯=:=采用高强度漆包线: 并绕根数N i12:=绝缘后直径 d 0.77103-⋅:=A'c1 3.959107-⋅:=18、定子槽形设计采用梨形槽,齿部平行,初步取: B't1 1.4:=铁心叠压系数 K Fe 0.95:=估计齿宽b't1t 1B'δ⋅K Fe B't1⋅ 4.361103-⨯=:=初步取:B'j1 1.25:=估计轭部计算高度 h'j1τα'p ⋅B'δ⋅2K Fe B'j1⋅0.0149=:=按齿宽和轭部计算高度的估算值作出定子槽形,槽口尺寸按类似产品决定r 21 3.3103-⋅:=b 110.0045:= h 010.8103-⋅:=h's 0.0116:=b 012.8103-⋅:=h 110.0005:=h s1h's h 01+r 21+:= h 210.01160.0005-0.0111=:=b t21πD i12h 01+2h's+()⋅Z 12r 21- 4.221103-⨯=:=b t11πD i12h 01+2h 11+()Z 1b 11- 4.3837103-⨯=:=b t1b t21b t11+()24.3024103-⨯=:=19、槽满率槽楔厚h 0.002:=槽绝缘层厚∆i 0.25103-⋅:=槽绝缘占面积 A i ∆i 2h's πr 21+()⋅8.3918106-⨯=:=槽面积A s 2r 21b 11+2h's h -()⋅πr 212⋅2+7.0386105-⨯=:=A ef A s A i - 6.1994105-⨯=:=槽满率s f N i1N s1⋅d 2⋅A ef0.7842=:=槽满率一般为百分之七十m上述的参符合要求20、绕组系数 αp 2πZ 1⋅:=q 3:=K d1sin q α⋅2⎛⎝⎫⎪⎭q sin α2⎛ ⎝⎫⎪⎭⋅0.9598=:=K p11:=K dp1K d1K p1⋅0.9598=:=每相有效串联导体数N ϕ1K dp1⋅472.2192=21、设计转子槽形与转子绕组根据cos 由表10-10查得 K I 0.88:=预计转子导条电流I'2K I I'1⋅3N ϕ1K dp1⋅Z 2⋅195.5138=:=初步取转子导条电密J'B 3.5106⋅:=A'B I'2J'B 5.5861105-⨯=:=初步取B't2 1.3:=估算转子齿宽 b't2t 2B'δ⋅K Fe B't2⋅ 5.2515103-⨯=:=初步取B'j2 1.25:=估算转子轭部计算高度h'j2τα'p ⋅B'δ⋅2K Fe ⋅B'j2⋅0.0149=:=为获得较好的起动性能,取给定槽尺寸h 020.0005:= h 120.001:= h 220.0143:= b 120.0045:=b 220.002:=b 020.001:= h's2h 12h 22+0.0153=:=a 0.02:=b 0.011:=齿壁平行的槽型的齿宽计算如下b t2πD 2h 02-h's2-()⋅Z 212b 12b 22+()- 4.8789103-⨯=:=导条截面积(转子槽面积)A Bb 02b 12+2⎛ ⎝⎫⎪⎭h 12⋅b 22b 12+2⎛ ⎝⎫⎪⎭h 22⋅+ 4.9225105-⨯=:=估计端环电流 I'R I'2Z 22π⋅p ⋅⋅497.8718=:=端环电密J'R 0.6J'B :=端环所需面积 A'R I'R J'R 2.3708104-⨯=:= 端环平均直径 D R 0.0788:=按照工艺要求取端环面积约为 A R 12a b +()D 2D R-()⋅ 3.069104-⨯=:=二 磁路计算22、计算满载电势初设K'E 0.9002:= ε'L 1K'E -:=E 11ε'L -()U N ϕ⋅198.044=:=23、计算每极磁通初设K's 1.235:=由图3-5查得K Nm 1.11:=ΦE 14K Nm ⋅K dp1⋅f ⋅N 1⋅ 3.7783103-⨯=:=于是导条截面积为计算磁路各部分磁密,需先计算磁路中各部分的导磁截面 24、每极下齿部截面积A t1K Fe l t ⋅b t1⋅Z p1⋅ 3.8625103-⨯=:= A t2K Fe l t ⋅b t2⋅Z p2⋅ 3.8933103-⨯=:=25、定转子轭部计算高度及其导磁面积h'j1D 1D i1-2h s1-r 213+0.0133=:=h'j2D 2D i2-2h's2-0.015=:=A j1K Fe l t ⋅h'j1⋅ 1.3267103-⨯=:=A j2K Fe l t ⋅h'j2⋅ 1.4962103-⨯=:=26、一极下空气隙截面积A δτl ef⋅8.2275103-⨯=:=27、波幅系数α'p 0.67:=F s 1α'p1.4925=:=28、气隙磁密B δF s Φ⋅A δ0.6854=:=29、对应于气隙磁密最大值处的定子齿部磁密B t1F s Φ⋅A t11.46=:=30、转子齿部磁密B t2F s Φ⋅A t21.4484=:=31、从D23磁化曲线上查得对应上述磁密的磁场强度p403H t11974:= H t21853:=32、有效气隙长度K δ1t 14.4δ⋅0.75b 01⋅+()⋅t 14.4δ0.75b 01⋅+()⋅b 012- 1.3602=:=K δ2t 24.4δ⋅0.75b 02⋅+()⋅t 24.4δ0.75b 02⋅+()⋅b 022- 1.0525=:=K δK δ1K δ2⋅ 1.4316=:=δef K δδ⋅ 4.2949104-⨯=:=33、齿部磁路计算长度L t1h 11h 21+()13r 21⋅+0.0127=:=L t2h 12h 22+()0.0153=:=34、轭部磁路计算长度L'j1πD 1h'j1-()⋅2p 12⋅0.0556=:=L'j2πD i2h'j2+()⋅2p 12⋅0.0208=:=35、计算气隙磁压降μ04π107-⋅:=F δK δB δ⋅δ⋅μ0234.2604=:=36、计算齿部磁压降F t1H t1L t1⋅25.0698=:= F t2H t2L t2⋅28.3509=:=37、计算饱和系数K s F δF t1+F t2+Fδ1.228=:=K''s K s K s K's -3- 1.2304=:=由此经验公式重新计算饱和系数,代入第23步重新计算,直至相对误差小于1%σs K's K s -K s:=σs 5.6677103-⨯=由上可知,计 1%,符38、定子轭部磁密B j112ΦA j1⋅ 1.424=:=39、转子轭部磁密B j212ΦA j2⋅ 1.2626=:=40、从D23磁化曲线上查找上述磁密对应的磁场强度H j11100:= H j2995:=41、按式(3-42)计算轭部磁压降 h'j1τ0.1707=B j11.424=据图附1-3b 查轭部磁位降校正系数C j10.3917:= h'j2τ0.1925=B j21.2626=据图附1-3b 查轭部磁位降校正系数C j20.4232:=F j1C j1H j1⋅L'j1⋅23.976=:= F j2C j2H j2⋅L'j2⋅8.764=:=42、每极磁势F 0F δF t1+F t2+F j1+F j2+320.4211=:=43、计算满载磁化电流I m 2pF 0⋅0.9m 1⋅N 1⋅K dp1⋅ 2.0105=:=44、磁化电流标幺值I mj I mI KW0.6031=:=45、计算励磁电抗及其标幺值X ms 4f μ0⋅m 1π⋅N 1K dp1⋅()2K s p ⋅⋅l ef ⋅τδef ⋅104.3537=:=X msj X ms I KW U N ϕ⋅ 1.5811=:=三 参数计算46、线圈平均半匝长节距比β28⋅17⋅+39⋅0.8519=:=0.852为其近似值,τy πD i12h 01h 11+()+h 21+r 21+⎡⎣⎤⎦⋅2p β⋅0.0777=:=直线部分长度 d 10.015:= l B l t 2d 1+0.135=:= 直线部分长度 K c 1.2:=l c l B K c τy ⋅+0.2283=:=47、端部平均长l E 2d 1K c τy ⋅+0.1233=:=48、漏抗系数C x 4πf ⋅μ0⋅N 1K dp1⋅()2⋅l ef ⋅P N ⋅m 1p ⋅U N ϕ2⋅0.0352=:=阻抗基值Z KW U N ϕI KW66=:=49、定子槽比漏磁导λL10.978:=K U1 1.0:= K L1 1.0:=查λU1h 01b 012h 11⋅b 01b 11++0.4227=:=λs1K U1λU1⋅K L1λL1⋅+ 1.4007=:=50、槽漏抗标幺值X s1j 2m 1p ⋅Z 1K dp12⋅l tl ef ⋅λs1⋅C x ⋅0.0177=:=51、定子谐波漏抗标幺值由图4-10查得 Ξs 0.0129:=定子谐波漏磁导λδ1m 1q 1⋅τ⋅Ξs ⋅π2δef ⋅K s⋅ 1.7377=:=X δ1j m 1π2τδef ⋅Ξs K dp12K s ⋅⋅C x ⋅0.0221=:=52、端部漏抗标幺值定子端部漏磁导 λE10.47q 1l ef l E 0.64τy -()⋅0.9819=:=X E1j 0.47l E 0.64τy-()⋅l ef K dp12⋅C x ⋅0.0125=:=53、定子绕组漏抗及其标幺值Ξλ1λs1λδ1+λE1+ 4.1202=:=X σ14πf μ0⋅N 12pq 1⋅⋅l ef ⋅Ξλ1⋅ 3.4649=:=X σ1j X s1j X δ1j +X E1j+0.0524=:=54、阻抗折算系数K 4m 1N 1K dp1⋅()2⋅Z 2 2.0905104⨯=:=55、转子槽比漏磁导b 22b 120.4444=h 12h 22+b 123.4=由图附1-6b 查得λL 2.364:=则有λU2h 02b 020.5=:=λL22h 12b 02b 12+λL + 2.7276=:=λs2λU2λL2+ 3.2276=:=56、转子槽漏抗标幺值X s2j 2m 1p ⋅Z 2l tl ef ⋅λs2⋅C x ⋅0.0424=:=57、转子谐波漏抗标幺值(考虑饱和影响)因 Z 22p 8=由图4-11查得 ΞR 0.0135:= X δ2j m 1τ⋅ΞR ⋅π2δef ⋅K s⋅C x ⋅0.0213=:=58、转子绕组端部漏抗标幺值X E2j 0.757l ef D R 2p ⋅C x ⋅ 4.9728103-⨯=:= 59、转子斜槽漏抗标幺值X skj 0.5b sk t2⎛ ⎝⎫⎪⎭2⋅X δ2j ⋅9.2257103-⨯=:=60、转子漏抗标幺值X σ2j X s2j X δ2j +X E2j +X skj +0.0779=:=61、定转子漏抗标幺值之和X σj X σ1j X σ2j +0.1303=:=62、定子绕组直流电阻ρwCu2.17108-⋅:= N t12:=R 1ρwCu 2N 1l c⋅N t1A'c1⋅a 1⋅⋅ 3.0782=:=63、定子绕组相电阻标幺值R 1j R 1I KWUN ϕ⋅0.0466=:=64、有效材料的计算定子铜重量C 1.05:=ρCu 8.9103⋅:=G Cu C l c ⋅N s1⋅Z 1⋅A'c1⋅N t1⋅ρCu ⋅ 2.4933=:=硅钢片重量δ00.005:=ρFe 7.8103⋅:= G Fe K Fe l t ⋅D 1δ0+()2⋅ρFe ⋅19.9181=:=65、转子电阻的折算值ρwAl4.34108-⋅:=K B 1.04:= L B 0.135:=R'B ρwAl K B L B ⋅A B ⋅4m 1N 1K dp1⋅()2⋅Z 2⋅ 2.5878=:=R Bj R'B I KWU N ϕ⋅0.0392=:=R'R ρwAl Z 2D R ⋅2π⋅p 2⋅A R ⋅⋅4m 1N 1K dp1⋅()2⋅Z 2⋅0.2966=:=R Rj R'R I KW U N ϕ⋅ 4.4941103-⨯=:=R'2R'B R'R + 2.8844=:= R 2j R Bj R Rj +0.0437=:=66、定子电流有功分量标幺值η''0.815:=I 1Pj 1η''1.227=:=67、转子电流无功分量标幺值σ11X σ1jX msj+ 1.0331=:=系数I Xj σ1X σj ⋅I 1Pj 2⋅1σ1X σj ⋅I 1Pj ⋅()2+⎡⎣⎤⎦⋅0.2082=:=68、定子电流无功分量标幺值I 1Qj I mj I Xj +0.8114=:=69、满载电势标幺值K Ej 1I 1Pj R 1j ⋅I 1Qj X σ1j ⋅+()-0.9003=:=70、空载电势标幺值ε0I mj X σ1j⋅0.0316=:=1ε0-0.9684=71、空载时定子齿部磁密及磁场强度(假定饱和系数Ks 和波幅系数Fs 不变)εL 10.904-:=B t101ε0-1εL-B t1⋅:=B t10 1.564= H t104618:=72、空载时转子齿部磁密及磁场强度B t201ε0-1εL-B t2⋅:=B t20 1.5516= H t203500:=73、空载时定子轭部磁密及磁场强度B j101ε0-1εL-B j1⋅:=B j10 1.5254= H j101624:=74、空载时转子轭部磁密及磁场强度B j201ε0-1εL-B j2⋅:=B j20 1.3525= H j201304:=75、空载气隙磁密B δ01ε0-1εL -B δ⋅0.7342=:=76、空载时定子齿部磁压降F t10H t10L t1⋅58.6486=:=77、空载时转子齿部磁压降 F t20H t20L t2⋅53.55=:=78、空载时定子轭部磁压降此时 C j10.3271:=F j10C j1H j10⋅L'j1⋅29.5594=:=79、空载时转子轭部磁压降此时 C j20.3609:=F j20C j2H j20⋅L'j2⋅9.7949=:=80、空载时气隙磁压降F δ0K δδ⋅B δ0⋅μ0250.9479=:=81、空载时每极磁势F 00F δ0F t10+F t20+F j10+F j20+402.5008=:=82、空载磁化电流I m02pF 00⋅0.9m 1N 1⋅K dp1⋅ 2.5255=:= 感应电机空载电流可近o四 工作性能计算83、定子电流标幺值I 1j I 1Pj 2I 1Qj 2+ 1.471=:=定子电流实际值I 1I 1j I KW ⋅ 4.9033=:=84、定子电流密度J 1I 1a 1N i1⋅A'c1⋅ 6.1927106⨯=:= 85、定子线负荷A 1m 1N ϕ1⋅I 1⋅πD i1⋅ 2.3223104⨯=:=86、转子电流标幺值I 2j I 1Pj 2I Xj 2+ 1.2445=:=导条电流实际值 I 2I 2j I KW ⋅m 1N ϕ1⋅K dp1⋅Z2⋅183.6546=:=端环电流实际值 I R I 2Z 22πp ⋅467.6726=:=87、转子电流密度导条电密 J B I 2AB 3.7309106⨯=:=端环电密 J R I R AR 1.5239106⨯=:=88、定子铜耗标幺值p Cu1m 1I 12⋅R 1⋅222.0269=:=P N m 1I KW 2⋅Z KW ⋅ 2.2103⨯=:= p Cu1j p Cu1P N 0.1009=:= 89、转子铝耗标幺值p Al2j I 2j 2R 2j ⋅0.0677=:=p Al2p Al2j P N ⋅148.9194=:=90、负载时的附加损耗按规定4极电机取 p sj 0.02:=p s p sj P N ⋅44=:=91、机械损耗及其标幺值p fW 3p⎛ ⎝⎫⎪⎭2D 14⋅104⋅12.987=:=p fWj p fW PN 5.9032103-⨯=:=92、铁损耗k 1 2.5:= k 22:=经验系数 根据 B j10 1.5254=从附录六查得轭部铁耗系数p hej 4.693:=根据B t10 1.564= 从附录六查得齿部铁耗系数 p het 6.699:=G j 4p A j1⋅L'j1⋅ρFe ⋅:= G t 2p A t1⋅L t1⋅ρFe ⋅:=定子轭部重量 定子齿部重量 p Fej k 2p hej ⋅G j ⋅:=pFet k 1p het ⋅G t ⋅:=定子轭部铁耗 定子齿部铁耗 p Fe p Fej p Fet +68.8688=:=全部铁耗及其标幺值 p Fej.p FeP N0.0313=:=93、总损耗标幺值Ξp j p Cu1j p Al2j +p sj +p fWj +p Fej.+0.2258=:=94、输入功率标幺值P N1j 1Ξp j + 1.2258=:=95、核算效率η1Ξp jP N1j -0.8158=:=96、功率因数cos φI 1PjI 1j0.8341=:=97、额定转差率p Fejr 11k 2-⎛ ⎝⎫⎪⎭p Fej ⋅21.6187=:=p Fetr 11k 1-⎛ ⎝⎫⎪⎭p Fet⋅15.3789=:=p Ferj p Fejr p Fetr+P N 0.0168=:=s N p Al2j 1p Al2j +p Ferj +p sj +p fWj+0.061=:=98、额定转速n 160f p 1.5103⨯=:=n N n 11s N -()⋅ 1.4086103⨯=:=99、最大转矩倍数T mj 1s N-2R 1j R 1j 2X σj 2++⎛⎝⎫⎭⋅:= 四 起动性能计算100、按照式(10-56)假设起动电流I'st 2.8T mj ⋅I KW ⋅:=101、按照式(10-59)计算起动时产生漏磁的定转子槽磁势平均值F st I'st N s1a 1⋅0.707⋅K U1K d12K p1⋅Z 1Z 2⋅+⎛ ⎝⎫⎪⎭1ε0-⋅⎡⎢⎣⎤⎥⎦⋅:=βo 0.642.5δt 1t 2+⋅+0.9598=:=由此磁势产生的虚拟磁密按照(10-60)计算B L μ0F st⋅2δβo⋅ 3.0017=:=102、起动时的漏抗饱和系数由图(10-18)查得K z 0.6560:=1K z -0.344=103、漏磁路饱和引起的定子齿顶宽度的减小c s1t 1b 01-()1K z -()⋅ 2.0148103-⨯=:=104、漏磁路饱和引起的转子齿顶宽度的减小c s2t 2b 02-()1K z -()⋅ 2.9859103-⨯=:=105、按照式(10-68)计算起动时转子槽比漏磁导∆λU1h 010.58h 11+b 01c s1c s11.5b 01⋅+⎛ ⎝⎫⎪⎭⋅0.1262=:=λs1.st K U1λU1∆λU1-()⋅K L1λL1⋅+ 1.2745=:=106、起动时定子槽漏抗X s1j.st λs1.stλs1X s1j ⋅0.0161=:=107、起动时定子谐波漏抗X δ1j.st K z X δ1j ⋅0.0145=:=108、起动时定子漏抗X σ1j.st X s1j.st X δ1j.st +X E1j +0.0432=:=109、考虑集肤效应的转子导条相对高度b 22b 120.4444=导条高度h B h 12h 22+0.0153=:=ξ 1.987103-⋅h B⋅f0.0434106-⋅⋅ 1.0319=:=110、集肤效应引起的电阻增加系数和漏抗减小系数可从图4-24查出K F 1.1:=K x 0.96:=111、转子槽比漏磁导起动时转子槽比漏磁导的减小∆λU2h 02b 02c s2c s2b 02+⎛ ⎝⎫⎪⎭⋅0.3746=:=112、起动时转子槽漏抗X s2j.st λs2.stλs2X s2j ⋅0.036=:=113、起动时转子谐波漏抗X δ2j.st K z X δ2j ⋅0.014=:=114、起动时转子斜槽漏抗X skj.st K z X skj ⋅ 6.0521103-⨯=:=115、起动时转子漏抗X σ2j.st X s2j.st X δ2j.st +X skj.st +X E2j +0.0611=:=116、起动时总漏抗X σj.st X σ1j.st X σ2j.st +0.1042=:=117、起动时转子电阻R 2j.st K F R Bj ⋅R Rj +0.0476=:=118、起动时总电阻R stj R 1j R 2j.st +:=119、起动时总阻抗Z stj R stj 2X σj.st 2+0.1405=:=120、起动电流I st I KW Z stj 23.7182=:=误差 err I.st I st I'st -Ist 1.5882103-⨯=:= 如果过大,回到第100项重新假设起动电流从上述计算可知,121、起动电流倍数i st I st I 14.8372=:=122、起动转矩倍数T stj R 2j.st Z stj 21s N -()⋅ 2.2642=:=。