博士研究生入学考试大纲
2024年博士研究生入学考试英语考试大纲
2024年博士研究生入学考试英语考试大纲2024 Doctoral Graduate Entrance Examination English Exam OutlineI. Listening ComprehensionThis section of the exam will test the candidates' ability to understand spoken English in academic and professional settings. Candidates will listen to a series of recordings, including lectures, conversations, and presentations, and answer multiple-choice questions based on the content. The topics will cover a wide range of subjects relevant to doctoral studies, such as research methods, literature reviews, and academic discussions.II. Reading ComprehensionIn this section, candidates will read academic texts, including scholarly articles, research papers, and book excerpts, and answer questions to demonstrate their understanding of the content. The passages will be of varying lengths and complexity, requiring candidates to identify main ideas, supporting details, and logical relationships within the text.III. Writing SkillsCandidates will be required to demonstrate their ability to write coherent and well-structured essays on a variety of topics related to their field of study. This section will test candidates' proficiency in academic writing, including the ability to formulate clear arguments, provide evidence to support their claims, and organize their ideas in a logical manner. Candidates may be asked to analyze a case study, evaluate a research question, or propose a research methodology.IV. Vocabulary and GrammarThis section will assess candidates' knowledge of vocabulary and grammar in academic English. Candidates will be tested on their ability to use complex vocabulary and grammar structures accurately and appropriately in written and spoken English. This section may include exercises on word meaning, word usage, sentence structure, and grammatical rules.V. Speaking SkillsCandidates will be required to engage in conversations and discussions on academic topics with examiners. This section will test candidates' ability to express ideas clearly and coherently, respond to questions, and engage in academic discourse. Candidates will be evaluated on their fluency, pronunciation, vocabulary usage, and grammar accuracy.Overall, the 2024 Doctoral Graduate Entrance Examination English Exam is designed to assess candidates' readiness for doctoral studies by evaluating their listening, reading, writing, speaking, vocabulary, and grammar skills in academic English. Candidates are encouraged to prepare thoroughly for the exam by practicing listening and reading comprehension, academic writing, vocabulary building, and speaking skills in English. Good luck to all the candidates!。
博士生入学考试专业基础科目考试大纲
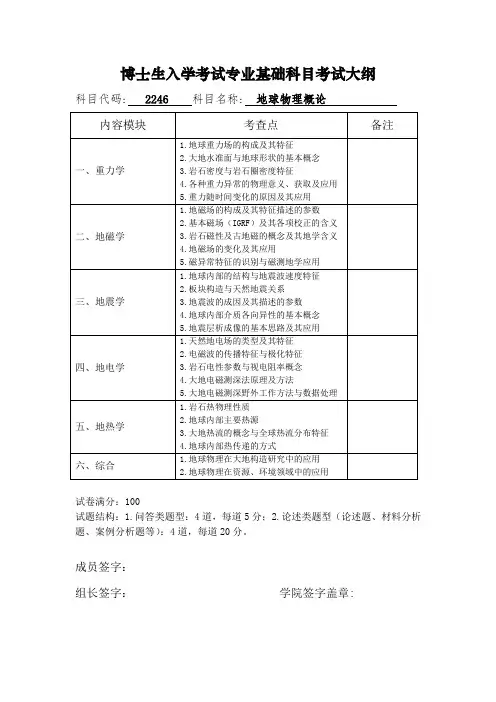
科目代码:2246科目名称:地球物理概论
内容模块
考查点
备注
一、重力学
1.地球重力场的构成及其特征
2.大地水准面与地球形状的基本概念
3.岩石密度与岩石圈密度特征
4.各种重力异常的物理意义、获取及应用
5.重力随时间变化的原因及其应用
二、地磁学
1.地磁场的构成及其特征描述的参数
2.地球物理在资源、环境领域中的应用
试卷满分:100
试题结构:1.问答类题型:4道,每道5分;2.论述类题型(论述题、材料分析题、案例分析题等):4道,每道20分。
成员签字:
组长签字:学院签字盖章:
四、地电学
1.天然地电场的类型及其特征
2.电磁波的传播特征与极化特征
3.岩石电性参数与视电阻率概念
4.大地电磁测深法原理及方法
5.大地电磁测深野外工作方法与数据处理
五、地热学
1.岩石热物理性质
2.地球内部主要热源
3.大地热流的概念与全球热流分布特征4Leabharlann 地球内部热传递的方式六、综合
1.地球物理在大地构造研究中的应用
2.基本磁场(IGRF)及其各项校正的含义
3.岩石磁性及古地磁的概念及其地学含义
4.地磁场的变化及其应用
5.磁异常特征的识别与磁测地学应用
三、地震学
1.地球内部的结构与地震波速度特征
2.板块构造与天然地震关系
3.地震波的成因及其描述的参数
4.地球内部介质各向异性的基本概念
5.地震层析成像的基本思路及其应用
华中科技大学博士研究生入学考试《光波导技术》考试大纲
====Word行业资料分享--可编辑版本--双击可删====
华中科技大学博士研究生入学考试《光波导技术》考试大纲
一、考试性质
《光波导技术》是电子科学与技术、光学工程、光电信息工程等专业的核心课程,研究有关光波导理论与分析的基本方法、光波导器件与集成光子技术以及光波导技术在光传输、光传感和光检测等领域的重要应用。
评价标准是高等学校相关专业硕士毕业生能达到的水平,以保证被录取者具有较好的专业理论和技术基础以及开展相关科研工作的能力。
二、考试形式与试卷结构
1.答卷方式:闭卷、笔试
2.答题时间:180分钟
3.题型比例:
(1)概念题:20%
(2)简答题:40%
(3)计算题:20%
(4)论述题:20%
4.参考书目:
(1)刘德明等编著,《光波导技术》,华中科技大学讲义
(2)刘德明等编著,《光纤光学》,国防工业出版社
(3)范宗澄等编著,《导波光学》,清华大学出版社
三、考试要点
1.光波导基础理论与分析方法:光波导技术研究的数学物理模型、基本研究方法。
2.平板光波导:几何光学分析、波动光学分析、光波导设计与性能分析。
3.矩形光波导:几何光学分析、波动光学分析、光波导设计与性能分析。
4.圆柱光波导:几何光学分析、波动光学分析、光波导设计与性能分析。
5.光波导器件:光放大器、光纤光栅、光隔离器与环行器、光开关与光交叉连接器、光耦合器、波分复用器、光调制器等无源与有源器件的理论分析、设计方法与应用性能。
源-于-网-络-收-集。
博士研究生入学考试大纲啮合原理
博士研究生入学考试大纲
考试科目名称:啮合原理
一、考试要求:
要求考生全面系统地掌握齿轮啮合的基本概念及基本定律,并且能灵活运用,具备较强的分析问题与解决问题的能力。
二、考试内容:
1)平面啮合的基本原理
a.瞬心线
b.齿形啮合的基本原理
c.共轭齿形的形成及其求法的基本概念
d.轮转曲线与卡姆士定理
e.平面坐标的变换
f.共轭齿形的求法—齿形法线法
g.根据已知的啮合线求共轭齿形
h.平面啮合共轭齿形的曲率及其关系
i.博比利厄法则及其应用
j.平面啮合的滑动系数
2)螺旋面及其加工原理
a.升距圆柱螺旋面
b.刀具回转面与工件螺旋面的接触条件
c.已知工件螺旋面求刀具回转面
d.已知刀具回转面求工件螺旋面
e.盘形刀具加工螺旋面时的过渡表面及其消除办法
f.干涉现象及其校验
3.空间啮合的基本原理
a.采用的坐标系及其变换
b.相对运动速度
c.相对螺旋运动及瞬轴面
d.啮合方程式
e.空间啮合运动的自由度
f.点接触螺旋齿轮副的齿面计算
4)空间啮合的相对滑动及诱导法曲率
a.曲率的基本知识
b.相切曲面的诱导法曲率及诱导短程挠率
c.关于空间相对运动的基本知识
d.轴线固定的齿轮副共轭齿面的相对滑动
e.两类界限点的基本概念
f.线接触共轭齿面的诱导法曲率及诱导短程挠率
g.界限点处的法曲率及其性质
h.给定齿面的参数时诱导法曲率的计算
三、试卷结构:
题型结构
a.基本概念题
b.基本分析题
c.综合分析题
四、参考书目
《微分几何与齿轮啮合原理》石油大学出版社傅则绍。
博士研究生入学考试电子线路考试大纲
博士研究生入学考试《电子线路》考试大纲本《电子线路》考试大纲适用于热能工程专业分布式能源系统及微电网的博士研究生入学考试。
《电子线路》包括《模拟电路》和《数字电路》的基本内容。
主要考察学生全面系统地掌握电子技术的基本概念和基本电路,并且能灵活应用的能力。
重点考察考生对电子技术的基本概念、基本原理和基本分析方法的掌握程度和利用其解决电子技术领域相关问题的能力,要求具有较强的分析和设计电路的能力。
一、考试基本要求1.掌握半导体器件的特性和模拟电子电路的分析和设计方法;2.熟悉模拟电子技术的基本理论、基本方法和基本技能;3.初步掌握模拟电子电路系统的分析、设计方法;4.掌握门电路的结构、接口连接;熟练掌握数制与码制、逻辑代数基础;5.熟练掌握组合逻辑及时序逻辑电路的分析与设计。
二、考试方式与时间博士研究生入学《电子线路》考试形式为闭卷笔试,考试时间为180分钟。
三、考试主要内容和要求1、模拟电子技术(一)半导体二极管掌握半导体二极管的单向导电性、伏安特性并熟悉二极管电流方程、主要参数与小信号模型,二极管的反向击穿特性与稳压管的稳压作用。
(二)BJT电路直流偏置掌握BJT的工作原理及电流分配关系,BJT的伏安特性,三种工作状态(饱和、截止、放大)的外部条件和特点,BJT的主要参数、小信号电路模型及其参数的计算;熟练掌握BJT偏置电路的分析和设计方法。
(三)场效应晶体管理解增强型和耗尽型FET的工作原理、特性和主要参数,掌握FET的小信号电路模型及其参数。
(四)运算放大器集成运算放大器的主要参数及应用:包括:对基于集成运放的反馈放大器电路的分析时,确定参数是否符合要求;或根据要求设计基于集成运放的反馈放大器时,运放选型时对参数的考虑。
(五) 功率放大器掌握基本概念:晶体管的甲类、乙类和甲乙类工作状态,最大输出功率和转换效率。
(六)反馈电路掌握反馈的概念,反馈的判别方法、深度负反馈条件下闭环增益的估算,负反馈放大电路的选用及连接原则,反馈放大器对性能的改善。
2023年博士生入学考试初试科目考试大纲科目名称:电网络理论
2023年博士生入学考试初试科目考试大纲
科目名称:电网络理论
一、考试总体要求
《电网络理论》是介绍现代电路分析中一些较为成熟和先进的内容,是了解现代电路理论的“窗口”。
牢记基本概念,掌握基本方法,与大学电路原理的内容有机地联系在一起。
掌握与电气工程及电子工程相关的电路理论的一些新思想、新方法、新元件和新进展。
综合利用所学知识解决复杂电路分析计算问题。
二、考试内容
1.网络理论基础:网络元件的新体系,网络的互联规律性以及网络及元件的基本性质,如(1)线性与非线性、(2)无源性和有源性、(3)时变性与时不变性、(4)互易性与非互易性等。
2.简单非线性电路:非线性电阻电路的基本概念和常用分析方法以及一、二阶非
线性动态电路的分析方法。
重点掌握低阶自治电路的定性分析。
3.多口网络:含源及无源多口网络的常见矩阵表示法,重点掌握不定导纳矩阵的计算方法及其应用。
4.电路的代数方程:电路代数方程的矩阵形式,混合分析法,稀疏表格法和改进节点法,重点掌握混合分析法和改进节点法。
5.动态电路的时域方程:网络分析的状态变量法,状态方程的列写,线性状态方程的解析解法,重点掌握含有高阶元件、非线性元件或非常态电路的状态方程的列写。
6.网络的灵敏度分析:灵敏度分析的意义和在本专业分析计算中的主要应用,重点掌握伴随网络法。
三、考试题型
证明题、计算题、论述题
四、参考书目
1.梁贵书.高等电网络.讲义..2..高等电力网络分析. 2007。
天津大学博士研究生入学考试英语考试大纲
此项题目主要考查考生用不同的语言形式(句型)表达相同意义的能力。要求考生在理解原句意义的基础上,按照要求写出符合语法规则,且与原句意义相同或相近的句子,该部分共10题,每小题2分,共20分。
4、阅读理解
该部分考查考生理解书面英语的能力,其中包括理解具体信息、掌握文章大意、以及根据语境推断未知信息的能力。要求考生根据所提供的四篇文章的内容,从每题所给的4个选项中选出最佳答案,该部分每篇文章约350词,共20题,每题1分,共20分。
天津大学博士研究生公共英语入学考试是学校为招收博士研究生而设置的选拔性考试。教育部颁布的《硕士、博士研究生英语教学大纲》规定:"博士生入学其英语水平原则上应达到或略高于硕士生的水平"。根据这一规定,并结合我校招收博士研究生的具体情况,要求博士生入学英语考试既考查考生的语言知识,更注重测试考生的语言应用能力。
一、考试方式
考试采用笔试方式。考试时间为180分钟,试卷满分为100分。
二、考试内容与试卷结构
试题共分为六个部分:听写、词汇与语法、句型转换、综合填空、阅读理解、写作。
1、听写
该部分主要测试考生听力理解的技能及对口头英语信息的短期记忆能力。要求考生听一篇英语短文,在理解的基础上将其中部分内容复写出来。录音材料播放四遍,第一遍和第四遍为正常语速,第二遍和第三遍为较慢速度的朗读,句际间有短暂停顿。听写的文章语言程度适中,大约300词。该项目所需时间约20分钟,共20分。
5、综合填空
该部分考查考生对不同语境中规范的语言要素(包括词汇、短语和句子结构)的掌握程度,以及对语段特征(如衔接与连贯பைடு நூலகம்)的辨识能力。此题中在一篇240~280词的文章中留出20个空白,要求考生从每题所给的四个选项中选出最佳答案,使填空后的文章意义通顺、连贯,结构完整。此题共有20小题,每题0.5分,共10分。
昆明理工大学博士研究生入学考试《英语》考试大纲
昆明理工大学博士研究生入学考试《英语》考试大纲第一部分考试形式和试卷结构一、考试方式:考试采用闭卷笔试方式,试卷满分为100分。
二、考试时间:180分钟。
三、试卷内容结构:客观题占55%,主观题占45%。
四、试卷题型结构试卷由四部分组成:词汇、阅读理解、翻译(英汉互译)、写作。
其中:1.词汇,占15%。
测试考生词汇量及对常用词汇、短语和语法的熟练掌握程度。
2.阅读理解,占40%。
测试考生对篇章结构和阅读内容的理解能力,区分论点和论据的能力,以及阅读速度。
3.翻译(英汉互译),占25%。
测试考生对英汉两种语言转换的掌握程度。
4.写作,占20%。
测试学生的书面表达能力。
第二部分考试内容和要求一、词汇语法本部分主要测试考生是否具备一定的词汇量和根据上下文对词和词组意义判断的能力。
理解掌握5,000个左右的常用词和500个常用词组,熟练掌握其中2,000个左右的基本词,认知120个左右的常用词根和词缀,并能用构词法识别派生词。
考生应具备借助于词汇、句法及上下文线索对语言进行综合分析和应用的能力。
语法测试包括语态、语气、时态、动词非限定形式等。
要求考生从所给的四个选项中选出可用在句中的最恰当词或词组。
二、阅读理解本部分测试考生理解书面英语的能力,能熟练地运用各项阅读技能,具有语篇水平上的分析能力。
能较顺利地阅读并正确理解有相当难度的一般性题材文章和其他读物。
有四篇文章,每篇文章长度为400词左右,阅读速度达到每分钟60-70词,读后能理解中心思想及内容。
要求考生能:1.掌握篇章的组织结构,主题,主要论点和论据、具体细节,以及结论。
2.进行相关的判断和推理。
3.准确把握某些词和词组在上下文中的特定含义。
4.领会作者的观点和意图,判断作者的态度。
三、翻译1.英译汉要求考生将一篇近200词、有一定难度的一般性题材的英语短文翻译成汉语。
主要测试考生从语篇角度正确理解英语原句,并能用准确的书面汉语忠实、通顺地表达出来。
博士入学数学(高等数学、数值分析)课考试大纲
博士入学数学(高等数学、数值分析)课考试大纲
高等数学部分(50分)
1. 极限与连续
数列的极限,函数及函数的极限,极限的性质及运算法则,无穷小的比较,函数的连续性。
2. 导数与微分
导数的概念,导数的基本公式,导数的四则运算及求导法则,高阶导数,微分,函数的极值。
3. 微分中值定理
微分中值定理,洛必达法则,泰勒公式。
4. 积分
原函数与不定积分,定积分的概念与性质,换元积分法,分部积分法,微积分学基本定理,定积分的应用。
5. 微分方程
微分方程的基本概念,一阶微分方程,几种可积的高阶微分方程,线性微分方程及其通解的结构,常系数齐次(非齐次)线性微分方程。
6. 多元函数微积分
多元函数,偏导数与高阶偏导数,全微分,复合函数及隐函数的求导法,多元函数的极值,二重积分。
7. 无穷级数
无穷级数的敛散性,正项级数敛散性的判别,任意项级数,绝对收敛,幂级数及幂级数的收敛半径和收敛域,函数的幂级数展开。
数值分析部分(50分)
1.非线性方程求根
简单迭代法、牛顿法、割线法及其计算效率。
2.线性代数方程组的数值解法
向量与矩阵范数,高斯列主元消去法,误差分析;雅可比迭代法、高斯—赛德尔迭代法、超松弛迭代法及其收敛性讨论。
3.插值与拟合逼近
函数的拉格朗日插值、牛顿插值、埃尔米特插值、样条插值;曲线拟合的最小二乘逼近方法;误差分析。
4.数值积分
代数精度,低阶牛顿—柯特斯求积公式及其复化,龙贝格算法;高斯积分公式;数值积分公式的稳定性。
5.常微分方程初值问题的数值解法
常用单步法和多步法及其稳定性讨论;预测—校正格式。
博士研究生入学考试《数值分析(机电院)》考试大纲
博士研究生入学考试《数值分析(机电院)》考试大纲第一部分考试形式和试卷结构一、考试方式:考试采用闭卷笔试方式,试卷满分为100分。
二、考试时间:180分钟。
三、试卷内容结构:约占 60%,主观题约占 40%。
四、试卷题型结构:试卷由三部分组成:选择/判断、填空、分析/计算。
其中:1、选择/判断题,约占20%。
测试考生对本课程基本概念、基本知识和数值计算常用算法设计与分析方法的掌握程度。
2、填空题,约占40%。
测试考生运用数值计算相关基础知识和基本方法,开展计算、简要分析以及求解实际问题的能力。
3、分析、计算题,约占40%。
测试考生综合运用数值计算理论、典型方法解决综合问题,并开展相关计算方法收敛性以及误差分析等能力。
第二部分考察的知识及范围1.误差度量与数值算法设计误差基本概念:误差来源与分类,截断误差、舍入误差、绝对误差、相对误差,有效数字以及数值稳定性。
函数计算误差分析:一元函数误差估计,四则运算误差估计。
数值算法设计原则:简化计算步骤以节省计算量(秦九韶算法)、减少有效数字损失,选择数值稳定的算法。
2.函数的插值方法以及误差估计插值问题的基本概念:插值问题的描述,插值多项式的存在和唯一性,差商、差分的概念以及性质。
拉格朗日插值:线性插值与抛物插值,n次拉格朗日插值,插值余项公式。
牛顿插值:均差的概念与性质,牛顿插值公式及其余项,差分的概念与性质。
埃尔米特插值:两点三次埃尔米特插值及其余项,n点埃尔米特插值,非标准埃尔米特插值及其余项。
分段低次插值:分段线性插值,分段三次埃尔米特插值。
三次样条插值:三次样条函数建立,三次样条插值方法。
3.函数逼近与曲线拟合正交多项式:函数内积、欧几里德范数,正交函数序列,正交多项式,勒德让多项式,切比雪夫多项式。
最佳平方逼近:最佳平方逼近问题及解法,基于正交函数、勒德让多项式、切比雪夫多项式的最佳平方逼近。
最小二乘法:最小二乘曲线拟合问题的提出和解法,最小二乘计算,最小二乘法的应用(算术平均、超定方程组)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
博士研究生入学考试大纲
考试科目名称:捷联惯性导航原理
一、考试要求
要求学生对包括平台式、捷联式惯性导航系统在内的自主式导航系统的发展概况、工作原理、误差分析及初始对准有深入的理解和掌握。
具备较强的分析问题与解决问题的能力
二、考试内容
1.导航技术绪论
(1)导航系统基本概念、分类及国内外历史沿革及发展概况;导引系统基本概念、分类及国内外历史沿革及发展概况。
(2)刚体动力学原理。
(3)角速度数学模型。
(4)欧拉旋转及其四元数法表达。
(5)卡尔曼滤波技术。
2.导航基本概念和定律
(1)地球形状和重力场特性,导航用各种坐标系的定义及其转换。
(2)绝对运动加速度表达式的推导,运动对象和不同空间模型的相互关系。
3.平台式惯性导航系统概述
(1)平台式惯性导航系统。
(2)舒勒调整原理。
4.捷联式惯导系统的工作原理
(1)捷联式惯导系统的基本工作原理,捷联式惯导系统的姿态解算。
(2)捷联式惯导系统的误差方程推导及误差分析。
(3)捷联惯导系统静基座对准原理及设计。
(4)捷联惯导系统动态对准的定义、分类及实现原理。
5.组合导航系统应用
(1)管道惯性技术应用的基本模型。
(2)利用管道工程应用特点优化IMU数据。
(3)安装误差修正。
(4)动基座对准技术。
(5)终止点修正技术。
三、参考书目
1.《捷联惯性导航技术》张天光国防科技大学。