北理工自控期末考试题
华北理工自动控制原理2024年考试卷
北京化工大学2024年自动控制原理考试试卷
一、客观题(每题2分,共20分)
1、抗滞环系统中,C(z)的功能是:
A、抗滞控制
B、自激控制
C、稳定控制
D、滞回补偿
2、抗滞控制主要是为了解决以下哪种问题:
A、系统的稳定性
B、系统的追赶问题
C、系统的建模问题
D、系统的调节问题
3、对于系统来说,建立正确的模型是:
A、预测系统行为
B、控制系统行为
C、对系统状态变化做出适当反应
D、估计系统中的参数
4、系统的状态空间表示的是:
A、输入和输出的关系
B、内部状态的变化
C、输出和输入的变化
D、输入和输出的相关性
二、主观题(每题10分,共60分)
1、简述传统的抗滞环控制系统的结构和原理。
传统的抗滞环控制系统是由抗滞控制器、系统偏差的累积量以及系统滞回的补偿组成。
其原理是,当输入信号发生变化,抗滞控制器能够得到输入变化量关于时刻t之前的累积量与当前状态之间的关系,从而调节实际系统状态,使系统保持稳定。
抗滞控制器通过计算系统的滞回量,通过调整系统的输出,来补偿系统的滞回输出,使系统尽快恢复稳定状态。
2、简述线性时不变系统的基本假设和定义。
北理工《自动控制理论1 》在线作业满分答案
北理工《自动控制理论1 》在线作业试卷总分:100 得分:100一、单选题1.对于代表两个或两个以上输入信号进行()的元件又称比较器。
A. 微分B. 相乘C. 加减D. 相除正确答案:C2.主导极点的特点是()。
A. 距离虚轴很近B. 距离实轴很近C. 距离虚轴很远D. 距离实轴很远正确答案:A3. 开环控制系统特征是没有()环节。
A. 给定B. 放大C. 反馈D. 执行正确答案:C4.典型欠阻尼二阶系统,当开环增益K增加时,系统()A. 阻尼比增大,超调量增大B. 阻尼比减小,超调量增大C. 阻尼比增大,超调量减小D. 无阻尼自然频率减小正确答案:B5.Bode图包括幅频特性图和相频特性图,横坐标均为()。
A. 时间B. 弧度C. 角频率D. 相位正确答案:C6.下列哪种措施对提高系统的稳定性没有效果 ( )。
A. 增加开环极点B. 在积分环节外加单位负反馈C. 增加开环零点D. 引入串联超前校正装置正确答案:A7. 系统的传递函数在右半S平面上没有零点和极点,则该系统称作()。
A. 非最小相位系统B. 最小相位系统C. 不稳定系统D. 振荡系统满分:3 分正确答案:B8. 适合应用传递函数的系统是()。
A. 单输入,单输出的线性定常系统B. 单输入,单输出的线性时变系统C. 单输入,单输出的定常系统D. 非线性系统满分:3 分正确答案:A9. 单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于()A. 0B. 4sqrt(2)dBC. 16dBD. 无穷满分:3 分正确答案:D10. 典型二阶系统的超调量越大,反映出系统()A. 频率特性的谐振峰值越小B. 阻尼比越大C. 闭环增益越大D. 相角裕度越小满分:3 分正确答案:D11. 放大环节的对数幅频特性曲线是()。
A. 平行于横轴的直线B. 斜率为1的直线C. 逐渐增大至某一值的曲线D. 垂直于横轴的直线满分:3 分正确答案:A12. 系统对输入信号的时域响应中,其调整时间的长短是与()指标密切相关。
北京理工大学2006学年《自动控制原理》期末考试 答案与评分标准(A卷)(缺试题)

自动控制理论(一)答案一. (20分)解:(1) (10分) c r U U U -=2; 22U s C I ⋅=;222I R U R ⋅=;221R R U U U +=;21111I U R I R +=;111I s C U ⋅= ;12U U U R c += 。
消除中间变量得,1)2(1)()()(2122121221++++++=s T T s T T s T T s T T s U s U r c ,其中,,C R T 11=,C R T 22=。
解:(2) (10分)3211G G G P =322121321243G L -=;424213212331G G G H H G G G G ++++=∆;411G +=∆;421G +=∆;4242132124321331)1()2()(G G G H H G G G G G G G G s ++++++=Φ。
(允许使用方框图简化)二. (20分)解:(1) (10分) 22222)5()(nn ns s k s k s k s ωζωωτ++=+++=Φ;7.0%6.4=⇒=ζσp ;588.0=⇒=n p t ω;252==n k ω;08.0=τ;解:(2) (10分) k s k s kG s s GH G G G s e +++-+=++-=Φ)5(511)(2br 2br τ;s k ss G 2.05)(br ==。
三. (15分)解:(1) (6分) 劳斯计算表首列系数变号2次,S 平面右半部有2个闭环极点,系统不稳定。
333206633101234s s s s s -解:(2) (9分))1)(1()1()(312+++=s T s T s T K s G ;1020log 20=⇒=K K ;5002.0/11==T ;05.020/12==T ;05.0200/13==T ;)1005.0)(150()105.0(10)(+++=s s s s G ;2.0=c ω;8.83001.0arctan 10arctan 01.0arctan )(-=--=∠j G ;2.96)(180=∠+=j G γ,闭环系统的稳定。
北京理工大学自动控制理论04-07真题解析
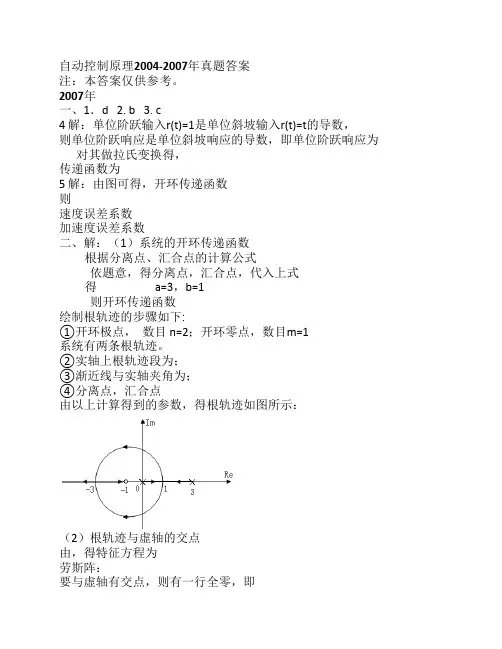
由以上计算得到的参数,得根轨迹如图所示:
(2)欲使超调量,应有 由,得 过坐标原点做与负实轴夹角为的直线,交根轨迹于A点。设A点坐标
为,显然,将其代人特征方程,可得 即当时,可使,闭环极点从()开始,沿根轨迹方向移动。
2)用根轨迹方法验证: 绘制根轨迹步骤如下: ①开环极点, 数目 n=4; 开环零点,数目m=1。系统有4条根轨迹。 ②实轴上根轨迹段为,; ③渐近线与实轴夹角为; 渐近线与实轴交点为; ④与虚轴的交点: 时, 得对应的 与虚轴的交点是
根据以上参数地根轨迹图如下:
由根轨迹图可知,当,时,闭环系统稳定。 可见,与由Nyquist曲线得到的结论是一致的。 (4)K=1时,闭环系统是稳定的,讨论稳态误差是有意义的。
则 可见调节时间为1拍,即1个采样周期。 五、解:(1)由已知得 负倒特性曲线如图7.9所示: 曲线如图7.9所示: 由图可知,负倒特性曲线与曲线有交点。所以存在自持振荡,并且 是稳定的自持振荡。(由不稳定区稳定区)
图7.9 系统曲线和曲线 (2)由,得 由①得, 当时, 由①、②得, 当时, 所以h的范围是 六、解:(1)由图可知,环节A的传递函数为:; 环节B的传递函数为:; 环节C的传递函数为:。 开环系统的总传递函数为:,系统结构图如图8.4所示:
1) 与负实轴的交点: 由,此时 即与负实轴的交点是(-0.83,0);
2) ; 3) ; Nyquist曲线如下:
(3) 1)由Nyquist曲线确定使闭环系统稳定的K值;如图所示: 当-0.83K>-1时,即K<1.2时,Nyquist曲线不包围(-1,j0)点,即N=0,
16秋北理工《自动控制理论I》在线作业 辅导资料
北理工《自动控制理论I》在线作业一、单选题(共 20 道试题,共 60 分。
)1. 一阶系统的阶跃响应()。
. 无超调. 当时间常数较大时有超调. 当时间常数较小时有超调. 有超调正确答案:2. 二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为()。
. 0.6. 0.707. 0. 1正确答案:3. 若系统的开环传递函数为,则它的开环增益为()。
. 1. 2. 5. 10正确答案:4. 单位反馈系统的开环传递函数G(s)=16/(s(s+4*sqrt(2))),其幅值裕度h等于(). 0. 4sqrt(2). 16. 无穷正确答案:5. 分析的性能指标,哪个指标是反映相对稳定性的()。
. 上升时间. 峰值时间. 调整时间. 最大超调量正确答案:6. 典型二阶系统的超调量越大,反映出系统(). 频率特性的谐振峰值越小. 阻尼比越大. 闭环增益越大. 相角裕度越小正确答案:7. 系统在作用下的稳态误差,说明 ( )。
. 型别ν<2. 系统不稳定. 输入幅值过大. 闭环传递函数中有一个积分环节正确答案:8. 梅森公式主要用来()。
. 判断稳定性. 计算输入误差. 求系统的传递函数. 求系统的根轨迹正确答案:9. 确定根轨迹大致走向,一般需要用()条件就够了。
. 特征方程. 幅角条件. 幅值条件. 幅值条件+幅角条件正确答案:10. 已知单位反馈控制系统在阶跃函数作用下,稳态误差为常数,则此系统为()。
. 0型系统. I型系统. II型系统. 高阶系统正确答案:11. 主导极点的特点是()。
. 距离虚轴很近. 距离实轴很近. 距离虚轴很远. 距离实轴很远正确答案:12. 系统的动态性能主要取决于开环对数幅频特性的()。
. 低频段. 开环增益. 高频段. 中频段正确答案:13. 系统稳定的充分必要条件是其特征方程式的所有根均在根平面的()。
. 右半部分. 左半部分. 实轴上. 虚轴上正确答案:14. 系统的频率特性(). 是频率的函数. 与输入幅值有关. 与输出有关. 与时间t有关正确答案:15. 典型欠阻尼二阶系统,当开环增益K增加时,系统(). 阻尼比增大,超调量增大. 阻尼比减小,超调量增大. 阻尼比增大,超调量减小. 无阻尼自然频率减小正确答案:16. 下列哪种措施对提高系统的稳定性没有效果 ( )。
北京理工大学自动化期末试卷答案07A
(2007~2008学年第一学期)
课程编号:0400003(1)课程名称:自动控制理论(一)
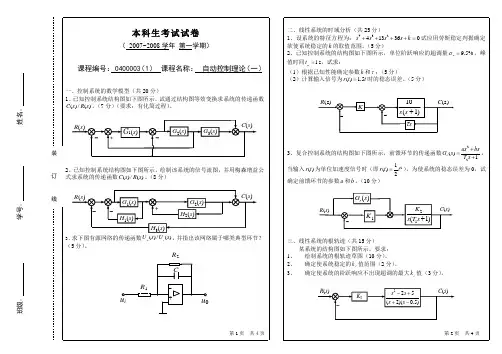
一、控制系统的数学模型(共20分)
1、已知控制系统结构图如下图所示。试通过结构图等效变换求系统的传递函数 。(7分)(要求:有化简过程)。
2、已知控制系统结构图如下图所示。绘制该系统的信号流图,并用梅森增益公式求系统的传递函数 。(8分)
五、线性系统的校正(共15分)
设单位反馈系统的开环传递函数为 ,试采用滞后-超前校正装置进行串联校正,要求:
1、当输入信号为 时,稳态误差
2、截止频率
3、相角裕度
六、非线性控制系统分析(共15分)
非线性控制系统如下图所示。
1、试用描述函数法分析a=1,b=2,k=10时,系统的稳定性。
2、若系统存在自持振荡,计算自持振荡的振幅和频率。
(2)计算输入信号为 时的稳态误差。(5分)
3、复合控制系统的结构图如下图所示,前馈环节的传递函数 ,当输入 为单位加速度信号时(即 ),为使系统的稳态误差为0,试确定前馈环节的参数 和 。(10分)
三、线性系统的根轨迹(共15分)
某系统的结构图如下图所示。要求:
1、绘制系统的根轨迹草图(10分)。
3、求下图有源网络的传递函数 ,并指出该网络属于哪类典型环节?(5分)。
二、线性系统的时域分析(共25分)
1、设系统的特征方程为: 试应用劳斯稳定判据确定欲使系统稳定的 的取值范围。(5分)
2、已知控制系统的结构图如下图所示,单位阶跃响应的超调量 ,峰值时间 s,试求:
(1)根据已知性能确定参数 和 ;(5分)
2、确定使系统稳定的 值范围(2分)。
北京理工大学自动化学院模拟电子技术基础期末考试题
Uo 的表达式并计算其数值。 Ui
3.求输入电阻 Ri 和输出电阻 Ro 。
图2
三、 (12 分)在图 3 所示电路中,各运放均为理想运算放大器,分别计算各电路 的输出电压。
图3
四、 (14 分)电路如图 4 所示,
图4 1. 为了将输入电压 u I 转换为稳定的输出电流 i L , 说明运放的同相与反相输入端应
图6 七、 (10 分) 在如图 7 所示电路中, 已知三端稳压器 W7812 的输出电压 U23=12V, 最大输出电流 IOmax=0.1A; A 为理想运放。 1.设 R1=R2=1K, R3=R4=2K,求输出电压 UO 的调节范围。 2.计算通过电阻 R2 电流的范围。
图7
失真,要消除该失真,
(a) 图 1-2
(b)
3. 已知放大电路的输入信号为 1mV,输出电压为 1V,引入负反馈后,为保证相 同的输出电压,输入信号为 10mV,则引入负反馈的反馈系数为 反馈深度为 。
,电路的
4.为了保证图 1-4 所示放大电路能正常工作,应选择何种类型的 M OS 管,画出
相应的符号并标明管脚接号。
如何连接。并说明该电路中反馈的组态。 2.如果输入电压 uI 的变化范围为 05V 时,计算电流 i L 的变化范围。 五、 (12 分)判 断 下 列 电 路 是 否 产 生 正 弦 波 , 并 简 述 理 由 。
(a)
(b)
(c) RC 正弦波振荡电路 图5 六、 (12 分)在图 6 所示三角波发生器中,已知 A1、A2、A3 均为理想运算放大器, 它们输出电压的两个极限值为 12V。 1.说明 A1、A2、A3 组成各电路的功能; 2.求解 u O 的频率 f 和幅值 UOM、 uO1 的峰值 UOM1。 3.画出输出电压 u O 与 u O1 和 u O2 的对应波形。
华北理工大学《自动控制C》2023-2024学年第一学期期末试卷
华北理工大学《自动控制C》2023-2024学年第一学期期末试卷考试时间:120 分钟;考试课程:《自动控制C》;满分:100分;姓名:——;班级:——;学号:——一、填空题(每题2分,共20分)1. 自动控制系统的主要任务是对被控对象进行____,使其输出满足预定的要求。
2. 传递函数是描述系统输出与输入之间关系的____表达式,它与系统的物理结构有关。
3. 二阶系统的动态性能主要取决于其____和____两个参数。
4. PID控制器由比例(P)、____(I)和____(D)三部分组成,它们各自对系统性能有不同的影响。
5. 奈奎斯特稳定性判据是通过分析系统开环频率特性的____线和____线的交点位置来判断系统稳定性的。
6. 离散时间系统的时间响应是通过求解____方程来获得的。
7. 增大系统的____可以提高系统的快速性,但也可能导致系统稳定性变差。
8. 在根轨迹法中,根轨迹是系统闭环极点随____参数变化而在复平面上移动的轨迹。
9. 系统的稳态误差是指系统达到稳态后,其输出量与希望值之间的____。
10. 对于非线性系统,通常可以采用____方法将其在一定范围内近似为线性系统进行分析和设计。
二、选择题(每题3分,共30分)1. 自动控制系统在受到外界扰动后,能够恢复到原来的平衡状态,这体现了系统的哪项基本性能?A. 准确性B. 稳定性C. 快速性D. 适应性2. 下列哪个是描述系统动态性能的数学工具?A. 微分方程B. 传递函数C. 状态方程D. 以上都是3. 在控制系统的频域分析中,当系统开环频率特性的相角穿越-180°线且幅值大于1时,系统:A. 稳定B. 不稳定C. 临界稳定D. 无法判断稳定性4. 对于一个二阶系统,若其自然频率ωn增大,而其他参数不变,则系统的:A. 阻尼比增加B. 振荡周期缩短C. 超调量减小D. 稳态误差增大5. PID控制器中,“I”代表什么控制作用?A. 比例(Proportional)B. 积分(Integral)C. 微分(Derivative)D. 反馈(Feedback)6. 在根轨迹法中,若增加开环零点,通常会使根轨迹:A. 向左移动B. 向右移动C. 形状不变D. 消失7. 系统稳定性的劳斯判据是通过分析系统的哪个函数的系数来判定的?A. 闭环传递函数B. 开环传递函数C. 误差函数D. 脉冲响应函数8. 下列哪种控制策略通常用于消除系统的稳态误差?A. 比例控制B. 微分控制C. 积分控制D. 滞后控制9. 在离散时间控制系统中,将连续信号转换为离散信号的过程称为:A. 采样B. 量化C. 编码D. 解码10. 下列哪个选项是描述系统动态响应的一个重要参数,它决定了系统响应的振荡程度和超调量?A. 阻尼比B. 自然频率C. 稳态误差D. 增益裕度三、简答题(每题5分,共20分)1. 解释什么是自动控制系统的稳定性,并简述其重要性。
北京理工大学自动化学院810自控2009-2013年真题详细 回忆版
2009年北理810 真题回忆2010年北京理工大学自动控制原理(810)真题(回忆版)2010年试卷总共九道大题,没有选择填空题,除六七题外,每道大题均在3问到5问之间一、二阶系统分析题目给出了一个二阶系统(带框图需要自己求传递函数)的单位阶跃响应的曲线图,让求其峰值,超调量等,这题不难,只需想到其阶跃响应应该是单位阶跃响应的积分,然后在所给曲线上找到与该图像与X轴的交点,这就是峰值时间,积分面积就是峰值,但是给出的数很怪,很影响人的情绪让人一看就不想做的那种,不过总体说来这应该算是试卷上最简单的题之一了,要分析加计算估计20分钟----25分钟。
二、系统框图分析给了一个框图,第一问让化简,它只是让证明,结果已经给了就是用平常的框图化简方法与Mason公式,我之前做了大量的框图化简的题,结果还是没证出来,应该有难度的,大家可以参考一下东北大学09年的那个框图化简题,应该有这个难度,就是知道框图但是很巧妙化Mason图很容易画错的那种,框图化简也不好弄,第二三四问然后赋予了第一问中的G(s)比较麻烦的式子,让你证明这个那个,比如说该系统对所有的某个参数都稳定啦之类,不难,思路你都会,很麻烦,一遍做对很不简单,要完整做完至少至少30分钟(如果你计算能力超强,写字很清晰的话)。
三、状态空间方法第一问还是证明,很麻烦,类似06年第二题,不过T矩阵让你自己取,然后他还给你了一个取矩阵的方法,也是很麻烦,不过如若你线性代数学得好的话,你可以根据给的那个方法一眼抽出该矩阵怎么取,不过计算量超大的,那个变换后的A矩阵,应该是T的逆乘A乘T,这里面T是4*4矩阵,A是含t的约旦标准型,结果可以从试卷这边写到那边,这一问做出来,至少20分钟,后面还有三问,判断可控客观性什么的,这个简单,但通篇做出来,至少30分钟吧。
四、根轨迹方法:用了第一题还是第二个题的框图来着,忘了,让画根轨迹,非最小相位环节的,两个复数零点两个开环零点,光求那个分离点,四个分母通分化简嘛,何况还是复数的,每个通分后都是三项,求出分离点就二十分钟没了,何况还要求什么入射角出射角什么的,第一问保守35分钟,第二问第三问没心情做了,当时一看时间过去一大半了,铁定做不完了,让证明对所有什么都稳定之类,当时脑子糊糊,没啥思路,应该要转个弯的。
北理工珠海学院自动控制原理试卷B
北京理工大学珠海学院
2010 ~ 2011学年第一学期嵌入式系统期末试卷(B )
适用年级专业:2007级自动化
试卷说明:闭卷考试,考试时间90分钟
一、填空题(总计30分)
1、对工程控制问题的基本要求可以归纳为三个方面: 、 、
2、动态性能指标通常有以下几种: 、 、 、 、 。
3、根轨迹是指当系统的 增益K 由零连续变化到无穷大时, 在复平面上形成的若干条曲线。
4、)()()(ωϕωωj e A j G =其中A (ω)是 与 之比, 称为幅频特性。
φ(ω)是 之差, 称为相频特性
5、校正装置接入系统可以改善系统性能,常用的校正系统有 、 、 、 。
二、判断对措(每题2分,总计10分) 1、系统的传递函数是在零初始条件下得到的 ( )
2、惯性环节传递函数为 1+Ts ( )
3、二级系统在过阻尼情况时, 系统特征根为实根 ( )
4、线性定常系统稳定的充分必要条件是,特征方程的根均在复平面的左半
三、计算题(30)
1、已知系统方框图如下所示,求:
)
()
(s R s Y
2、已知系统方框图如下所示:
求
R C
3 设系统特征方程如下
试用劳斯判据判断该系统的稳定性,并确定正实部根的数目。
432
++++=
s s s s
23450
四、(15分)绘出开环传递函数的波特图
)
105.0)(1()
2(5)(+++=s s s s s G
五(15)设比例-积分控制系统如图所示 . 其中K1为与积分器时间常数有关的待定参数 . 已知ζ=0.2 , ωn=86.6 , 试用劳思判据确定使闭环系统稳定的K1取值范围 .。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3、确定使系统的阶跃响应不出现超调的最大 值(3分)。
四、线性系统的频域分析(共10分)
1、已知最小相位系统的Bode图如下图所示。求该系统的传递函数 。(5分)
2、已知某系统当开环增益 时的开环频率特性Nyquist图如下图所示。该系统在右半平面的极点数 ,试分析当开环增益 变化时其取值对闭环稳定性的影响。(5分)
(2)系统的结构图如下图所示,前馈环节的传递函数 ,当输入 为单位加速度信号时(即 ),为使系统的稳态误差为0,试确定前馈环节的参数 和 。(10分)
三、线性系统的根轨迹(共15分)
某系统的结构图如下图所示。要求:
1、绘制系统的根轨迹草图(10分)。
3、求下图有源网络的传递函数 ,并指出该网络属于哪类典型环节?(5分)。
二、线性系统的时域分析(共25分)
1、设系统的特征方程为: 试应用劳斯稳定判据确定欲使系统稳定的 的取值范围。(5分)
2、已知控制系统的结构图如下图所示,单位阶跃响应的超调量 ,峰值时间 s,试求:
(1)根据已知性能确定参数 和 ;(5分)
五、线性系统的校正(共15分)
设单位反馈系统的开环传递函数为 ,试采用滞后-超前校正装置进行串联校正,要求:
1、当输入信号为 时,稳态误差
2、截止频率
3、相角裕度
六、非线性控制系统分析(共15分)
非线性控制系统如下图所示。
1、试用描述函数法分析a=1,b=2,k=10时,系统的稳定性。
2、若系统存在自持振荡,计算自持振荡的振幅和频率。
本科生考试试卷
(2007~2008学年第一学期)
课程编号:0400003(1)课程名称:自动控制理论(一)
一、控制系统的数学模型(共20分)
1、已知控制系统结构图如下图所示。试通过结构图等效变换求系统的传递函数 。(7分)(要求:有化简过程)。
2、已知控制系统结构图如下图所示。绘制该系统的信号流图,并用梅森增益公式求系统的传递函数 。(8分)
3、阐述消除自持振荡的方法。
(注:非线性控制系统的描述函数为: )