目视仪表程序第二课(4学时)E
目视检测操作规程

目视检测操作规程目视检测是一种常见的检测手段,用于观察和判断目标物体的形状、颜色、大小、数量等各种特征信息。
为了保证目视检测的准确性和可靠性,在进行目视检测时需要遵守一定的操作规程。
以下是一份目视检测的操作规程,供参考。
一、前期准备1.确保在适当的照明条件下进行目视检测。
如果需要,可使用辅助灯光或调整环境照明。
2.清理检测区域,保证目标物体的表面清洁,以免影响目视检测的观察结果。
3.针对目视检测的特殊要求,如检测目标的形状、颜色、大小等特征,做好必要的准备工作。
二、目视检测过程1.首先,确认检测目标的类型和要求。
了解目标的相关特征,以便进行正确的观察和评判。
2.将注意力集中在目标物体上,仔细观察其整体形状、颜色、大小等特征,并较为细致地观察其细节特征。
3.进行数量统计时,逐一仔细计数,确保不遗漏目标物体,并进行相应的记录。
4.在观察目标物体时,可以运用放大镜等工具进行辅助观察,以获得更详细、准确的信息。
5.如需要对目标物体进行测量,可以使用相应的测量工具进行测量操作,确保测量结果的准确性。
6.在目视检测过程中,如发现异常情况,比如物体损坏、缺损或其他异常状态,应及时记录并报告相关负责人或有关部门。
三、操作要求与注意事项1.进行目视检测时,需要保持充分的专注和耐心,细致观察。
尽量减少干扰和外界影响。
2.检测人员需具备良好的视觉能力和观察技巧,如有必要,可以进行相关培训和普查。
3.操作人员要熟悉所检测目标的特征和要求,遵循相关规程和标准进行操作。
4.在进行目视检测时,应按照规定要求完成记录,包括所检测物体的相关信息、结果和存在的问题等。
5.目视检测完成后,将记录整理并妥善保存,以备后续参考和查阅。
6.目视检测过程中,如需进行重复检测或配合其他检测方法,应按照要求进行操作。
7.如有必要,可利用科学仪器或技术手段对目标进行辅助检测,以提高检测准确度。
通过以上操作规程,可以提高目视检测的准确性和可靠性。
在实际操作中,应根据具体情况进行相应的调整和执行。
目视仪表程序第三课(4学时)E

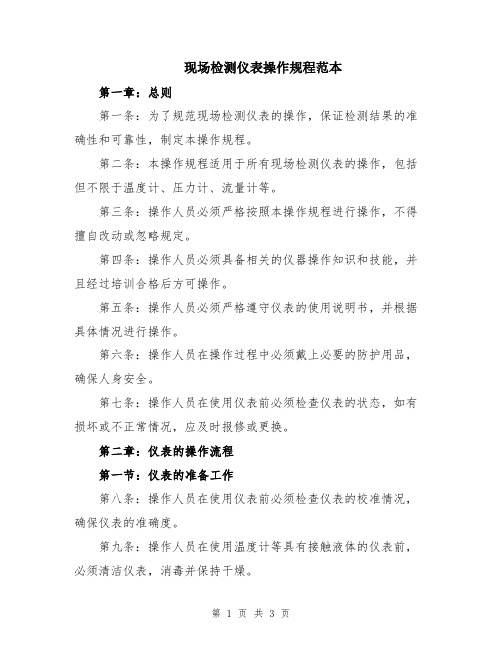
最低超障高度的计算(OCA/OCH)
OCA/H((Obstacle Clearance Altitude/Height)) 定义:保证仪表进近过程中,飞机不致与超障区 内的障碍物相撞的最低安全高度。 说明:IAF、IF、FAF的高度取决于各个航段的 OCA/OCH
计算OCA/OCH的步骤
Step 1:绘制保护区,查找障碍物。 Step2:在主区内的障碍物标高上直接加MOC(超障 余度 Minimum obstacle clearance)。 Step3:对付区内的障碍物需先计算相应的MOC’。 Step 4: OCA=h+ MOC/ MOC’ OCH=OCA-机场标高 说明:起始或中间航段以50M向上取整, 最后航段以5M向上取整。
15km (8NM)
17km (9NM)
19km (10NM)
中间进近航段的航迹设置准则
3、下降梯度 最好是平飞,0% 最大下降梯度为5.2%,而且在最后进近之前应对C、D类 航空器提供至少2.8km(1.5NM)的平飞段,对A、B类航空 器专用的程序,这个最小距离可减小至1.9km(1.0NM), 使航空器减速和改变外形。
各航段保护区的衔接
在FAF转弯大于10 °的最后进近区
中间进近保护区与最后进近保护区的衔接 当夹角在1—10°时,直接用圆弧连接 当夹角在11—30°时,用风螺旋线连接 作图使用的参数: —指示空速(IAS):为表1-1所列最后进近最大速度; —温度:ISA+15°C; —全向风风速(W):56km/h(30kt); —转弯坡度:20°; —C容差:驾驶员反应3秒+建立坡度3秒; C=(TAS+W)×6″; —E:转弯90°时间内受全向风影响的偏移量 E=90 °x W / R ; — 转弯率(R = 562tgα/ V ≤ 3°/s); —转弯半径(r = 180V / ΠR = 180V2 / Π562tgα)。
目视检查规范课件

05
目视检查的应用案例
Chapter
机械设备的目视检查
总结词
通过观察设备外观、结构、连接和运行状况,判断设备是否存在异常或潜在故障。
详细描述
目视检查是机械设备维护中常用的方法之一,通过观察设备的外观、结构、连接和运行状况,可以发现设备是否 存在异常或潜在故障。例如,检查机械零件是否有磨损、变形或断裂等现象,油路和气路是否畅通,以及设备运 行时的声音和振动是否正常等。
03
目视检查的方法
Chapter
直接目视检查
直接目视检查是指检查人员通过肉眼或简单工具直接观 察设备、产品或表面的状态,以发现异常或缺陷的过程 。 直接目视检查适用于观察表面状况、颜色、尺寸、结构 等,是目视检查中最基本的方法。
直接目视检查需要注意观察细节,并利用适当的光源和 角度来提高观察效果。
在初步观察的基础上,对被检查对象进行 详细检查,重点关注关键部位和可能存在 的问题点。
记录和拍照
交互与沟通
对检查过程中发现的问题进行记录,并拍 摄照片作为证据。同时,记录被检查对象 的整体情况,以便后续分析。
在检查过程中,与操作人员或其他相关人 员进行交流,了解被检查对象的运行状况 和使用情况,以便更好地理解问题所在。
操作熟练度,降低实际操作中的风险和误差。
THANKS
感谢观看
仪器辅助目视检查需要专业知识和技 能,并遵守相关安全操作规程。
常用的仪器辅助目视检查包括X射线 检测、超声检测、红外线检测等,可 以用于检测内部缺陷、材料性质等。
以上是关于目视检查方法的扩展内容 ,希望对您有所帮助。
04
目视检查的注意事项
Chapter
安全注意事项
01
《目视和仪表飞行程序设计(第三版)》教学课件04

目视和仪表飞行程序设计第四章ILS精密进近程序设计目录123概述障碍物的评价确定ILS进近的OCH4ILS进近的中间和起始进近区5I类ILS 航向台偏置或下滑台不工作仪表着陆系统的组成及其布局◆航向台由一个甚高频发射机、调制器、分流器及天线阵组成。
◆下滑台由高频发射机、调制器和上、下天线等组成。
◆在仪表着陆系统中,应配备两台或三台指点标机(I类ILS一般配有两台),用以配合下滑道工作。
内指点标台(IM)中指点标台(MM)外指点标台(OM)仪表着陆系统的性能分类ILS的分类及其性能标准ISL进近程序结构◆ILS进近程序的起始进近航段从IAF开始,到IF止。
IF必须位于ILS的航向信标的有效范围内。
◆ILS进近程序的中间航段从切入ILS航道的一点(中间进近点IP)开始,至切入下滑道的一点(最后进近点FAP)终止,其航迹方向必须与ILS航道一致。
图为中间航段最小长度。
ISL进近程序结构精密航段从最后进近点(FAP)开始,至复飞最后阶段的开始点或复飞爬升面到达300m高的一点终止(以其中距入口较近者为准),包括最后进近下降过程和复飞的起始与中间阶段。
必须与航向台的航道一致。
程序设计的标准条件◆航空器的尺寸:最大半翼展30m;着陆轮和GP天线飞行路线之间的垂直距离为6m。
◆Ⅱ类ILS进近的飞行使用飞行指引仪。
◆复飞上升梯度为25%。
◆ILS航道波束在入口的宽度为210m。
◆ILS基准高(RDH)为15m(49ft)。
◆所有障碍物的高以跑道入口标高为基准。
◆Ⅱ类和Ⅲ类飞行时,附件14的内进近面、内过渡面和复飞面没有穿透。
使用基本ILS面评价障碍物基本ILS 面的构成进近面构成ABC D 起将带复飞面过渡面使用基本ILS面评价障碍物基本ILS面的构成使用基本ILS面评价障碍物基本ILS面的高度方程式基本ILS面的交点坐标使用基本ILS面评价障碍物基本ILS面的高度方程式基本ILS面的交点坐标使用基本ILS面评价障碍物基本ILS面的高度方程式内进近面、内过渡面、复飞面的交点坐标及表达式使用基本ILS面评价障碍物评价的步骤和方法◆判断障碍物在基本ILS面的哪一个面内。
现场检测仪表操作规程范本
现场检测仪表操作规程范本第一章:总则第一条:为了规范现场检测仪表的操作,保证检测结果的准确性和可靠性,制定本操作规程。
第二条:本操作规程适用于所有现场检测仪表的操作,包括但不限于温度计、压力计、流量计等。
第三条:操作人员必须严格按照本操作规程进行操作,不得擅自改动或忽略规定。
第四条:操作人员必须具备相关的仪器操作知识和技能,并且经过培训合格后方可操作。
第五条:操作人员必须严格遵守仪表的使用说明书,并根据具体情况进行操作。
第六条:操作人员在操作过程中必须戴上必要的防护用品,确保人身安全。
第七条:操作人员在使用仪表前必须检查仪表的状态,如有损坏或不正常情况,应及时报修或更换。
第二章:仪表的操作流程第一节:仪表的准备工作第八条:操作人员在使用仪表前必须检查仪表的校准情况,确保仪表的准确度。
第九条:操作人员在使用温度计等具有接触液体的仪表前,必须清洁仪表,消毒并保持干燥。
第十条:操作人员在使用压力计等具有接触气体的仪表前,必须清洁仪表,确保无杂质。
第十一条:操作人员在使用电子仪表前,必须检查仪表的电源是否正常,并将仪表与电源正确连接。
第二节:仪表的操作方法第十二条:操作人员在使用仪表时,必须按照仪表使用说明书等相关规定进行操作。
第十三条:操作人员在使用温度计等液体接触仪表时,必须将仪表放入液体中,并将读数记录下来。
第十四条:操作人员在使用压力计等气体接触仪表时,必须将仪表与被测物连接,并读取相应的压力值。
第十五条:操作人员在使用电子仪表时,必须根据仪表的指示进行操作,并及时记录读数。
第十六条:操作人员在使用仪表过程中如发现异常情况,应立即停止操作,并及时报告有关负责人。
第三节:仪表的维护保养第十七条:仪表操作结束后,操作人员必须将仪表归位,并清理现场。
第十八条:操作人员在仪表使用过程中如发现仪表损坏或故障,应及时报修或更换。
第十九条:仪表保养时,必须按照仪表使用说明书等相关规定进行,确保仪表的正常运行。
现场检测仪表操作规程模版

现场检测仪表操作规程模版第一章总则第一条为了规范现场检测仪表的操作,保证安全、高效地完成各项检测任务,制定本操作规程。
第二章仪表操作规程第二条现场检测仪表操作人员必须经过专业培训,具备相应的操作能力,且严格按照下列规程操作。
第三条现场检测仪表操作前,必须对仪表进行检查,确保其处于正常工作状态,避免不必要的事故发生。
第四条操作人员必须穿着符合安全要求的工作服和防护用品,并配备相关工具和仪器。
第五条操作人员必须了解并严格遵守国家和企业的安全操作规程,确保操作工作安全可靠。
第三章操作流程第六条操作人员在开始操作前,必须仔细阅读仪器的使用说明书,并根据需要设置各项参数。
第七条操作人员必须正确连接电源和相关仪器,确保仪表的正常供电。
第八条操作人员必须按照操作流程依次进行操作,不得随意更改或省略任何步骤。
第九条操作人员在操作过程中,必须严格按照仪表的标准操作程序进行操作,不得擅自改动或调整任何参数。
第十条操作人员必须随时关注仪表的工作状态和指示灯,并及时采取措施处理异常情况。
第十一条操作人员在操作完成后,必须按照规定的程序进行仪表的关闭和清理工作,确保设备的安全和长期的正常使用。
第四章安全措施第十二条操作人员在操作前必须检查仪表是否处于安全状态,如发现异常情况必须报告主管人员并采取措施解决。
第十三条操作人员在操作过程中必须全神贯注,禁止与他人闲聊或玩乐,以免影响操作的专注度。
第十四条操作人员在操作过程中必须遵守相关的安全操作规程,包括佩戴手套、眼镜、口罩等个人防护用品。
第十五条操作人员在操作过程中必须保持现场的整洁,禁止任何无关人员进入操作区域,以确保操作环境的安全。
第十六条操作人员在操作过程中必须熟悉使用紧急停机按钮,并在发生危险情况时迅速采取紧急停机措施。
第十七条操作人员在操作过程中发现仪表出现异常情况时,必须立即停止操作并报告主管人员,不得私自修复。
第五章事故应急处理第十八条操作人员在操作过程中发生事故时,必须立即采取应急措施,保证人员安全,并报告主管人员。
目视和仪表程序设计规范_vol2(Doc8168).
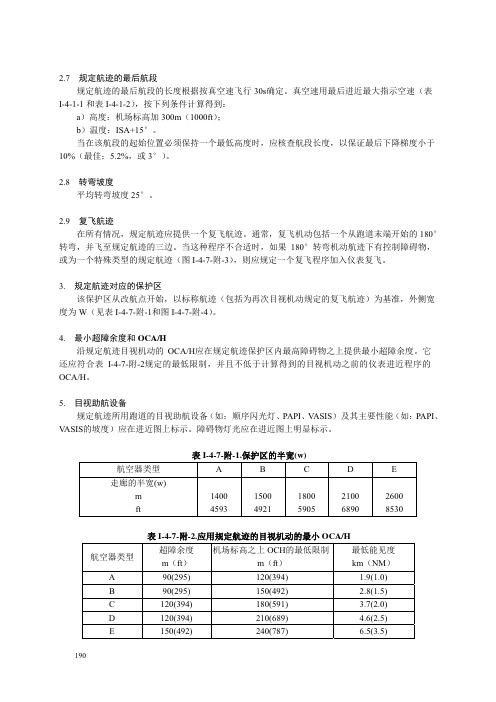
8.3
扇区方位 扇区的划分一般应与罗盘象限一致ˈ但如果由于地形或其他条件ˈ扇区边界也可选择其他方位ˈ 以取得最佳的最低扇区高度˄见图I-4-8-1˅ DŽ
8.4 相邻电台使用联合扇区 8.4.1 如果有一个以上电台提供至机场的仪表进近ˈ应分别设计最低扇区图ˈ并分别计算最低扇区 高度DŽ 8.4.2 如果这些为同一机场服务的电台位置相距在9km˄5NM˅以内ˈ则每个扇区的最低扇区高度 应该取各电台对应扇区的最低扇区高度中的最高数值DŽ 8.5 以 VOR/DME或 NDB/DME为中心的扇区 8.5.1 以VOR/DME或NDB/DME为中心的扇区ˈ可在扇区内另外规定一个圆形边界˄DME弧˅ ˈ将 扇区划分为分扇区ˈ在内侧的区域使用较低的MSADŽ 8.5.2 使用的DME弧应选择在19 km和28km˄10 NM和15NM˅之间ˈ以避免使用的分扇区太小DŽ分 扇区之间的缓冲区宽度仍为9km˄5NM˅ ˄见图I-4-8-2˅ DŽ
193
图 8-2.用 DME弧确定 VOR/DME分扇区的情况
194
9.公布 9.1 总则 有关飞行程序公布的指导材料见ICAO附件4中˖ a˅第9章˖标准离场图ü仪表˄SID˅üICAO˗ b˅第10章˖标准进场图ü仪表˄STAR˅üICAO˗ c˅第11章˖仪表进近图üICAODŽ
196
导的导航设施的名称ˈ各个导航设施名称之间用Ā或ā字隔开DŽ一张图上不应超过三种类型的进近 程序DŽ 示例˖ILS或NDB 跑道35L 9.5.2.4 直升机程序 直升机应采用与固定翼飞机进近相同的方法进行标识ˈ在最低标准表中应包括H类DŽ直升机进 近至区域内一点或一个直升飞机场应以最后进近所用引导导航设施类型进行标识ˈ其后为最后进近 航迹或径向线DŽ 示例˖VOR 235 9.5.2.5 盘旋进近 当图上只提供盘旋最后标准时ˈ进近程序以最后进近所用引导导航设施进行标识ˈ并加一个从 字母A开始的后缀DŽ如果一个机场˄或相邻机场˅有多个盘旋程序ˈ则应使用不同字母后缀DŽ如果 程序的仪表部分相同ˈ但同一个程序的盘旋航迹不同ˈ则只公布一个图名的一个程序ˈ并且在程序 中描述不同的盘旋程序DŽ 示例˖VOR-a VOR-b VOR-c 9.5.3 相同程序的标识 9.5.3.1 བ如果同一跑道的两个或两个以上程序仅通过无线电导航设施类型无法区别ˈ则在无线电导 航设施类型之后加上一个以Z开始编号的字母作为后缀DŽ 示例˖VOR y Rwy 20 VOR z Rwy 20 9.5.3.2 在下列情况ˈ应使用单字母的后缀˖ a˅相同跑道使用两个或两个以上相同类型的导航设施来保障不同的进近˗ b˅若两个或两个以上复飞与同一进近组合成不同的程序˗ c˅不同航空器类型的程序不同ˈ但使用相同类型的无线电导航设施˗ d˅两个或两个以上的进场使用相同的进近程序ˈ并且在不同的图上公布DŽ如果进场要求外加的 无线电导航设施ˈ这些设备应在平面图上加以描述DŽ 示例˖ILS y 跑道20˄平面图中应给出ĀCAB VOR 进场ā ˅ ILS z 跑道20˄平面图中应给出ĀDNA VOR 进场ā ˅ 9.5.4 外加导航设施要求 9.5.4.1 如果实施进近程序要求的导航设施没有在程序标识中涉及ˈ则应在图中注明DŽ 示例˖在一个NDB程序中Ā要求用VORā ˗ 当在NDB程序中要求用两个自动定向设备˖ Ā要求有两个ADFā ˗ ˗ Ā当从XXX NDB入航时ˈ在中间点转换为XXX NDBā 在VOR/DME进近时Ā要求有DMEā DŽ 9.5.4.2 制定最低标准时选择使用的其他导航设施应在最低标准表中明确表示ˈ但不需要再图上注 释DŽ 9.5.5 最低标准表 各类航空器的OCA/H应公布在图上的最低标准表中DŽ当OCA/H取决于特定的导航设施˄如梯级 下降定位点˅ ǃ特定的区域导航功能˄如LNAV/VNAV˅或RNP值时ˈ应能够清楚地进行识别DŽ示例˖ OCA/H LNAV/VNAV LNAV A类 560˄250˅ 710˄400˅ B类 560˄250˅ 710˄400˅ C类 630˄320˅ 810˄500˅ D类 630˄320˅ 810˄500˅ H类 560˄250˅ 710˄400˅
目视与仪表飞行程序设计
目视与仪表飞行程序设计在现代航空领域,目视与仪表飞行程序设计是确保飞行安全、高效和有序的关键环节。
这一领域的专业性极强,涉及到众多的科学原理、技术规范和实际操作经验。
目视飞行程序主要依赖飞行员通过肉眼观察外部环境来操纵飞机。
在这种飞行方式下,飞行员需要清晰地看到地面的地标、障碍物以及其他飞机,以此来保持正确的飞行路径和高度。
比如说,在天气状况良好、能见度高的时候,飞行员可以根据山脉、河流、道路等显著的地标来确定自己的位置和飞行方向。
仪表飞行程序则更多地依靠飞机上的各种仪表设备来提供飞行所需的信息。
即使在天气条件不佳、能见度低的情况下,飞行员依然能够准确地操纵飞机。
这些仪表包括高度表、空速表、航向表等等,它们为飞行员提供了关于飞机的高度、速度、航向等关键数据。
在设计目视飞行程序时,需要充分考虑到飞行员的视野范围和观察能力。
地标之间的距离和清晰度必须足够让飞行员能够及时发现并做出反应。
同时,也要考虑到地形和障碍物对飞行员视线的影响。
例如,在山区飞行时,山峰可能会阻挡飞行员的视线,因此需要特别规划飞行路线,避免出现危险。
仪表飞行程序的设计则更加复杂。
首先,要精确地确定各种导航设施的位置和性能参数,如导航台、雷达站等。
这些设施发出的信号能够被飞机接收,并转化为飞行的指引信息。
其次,要考虑到不同类型飞机的性能差异,以及各种气象条件对飞行的影响。
例如,在强风的情况下,飞机的飞行轨迹可能会发生偏移,程序设计时就需要预留出足够的安全余量。
无论是目视飞行程序还是仪表飞行程序,都需要遵循严格的国际和国内法规标准。
这些标准涵盖了飞行高度的限制、航线的划定、最低安全高度的设定等等。
任何违反这些标准的程序设计都可能导致严重的飞行事故。
在实际的飞行中,目视飞行程序和仪表飞行程序往往是相互结合的。
例如,在起飞和降落阶段,通常会采用目视飞行程序,以便飞行员能够更直观地观察跑道和周围环境。
而在航线飞行过程中,如果遇到恶劣天气,可能会从目视飞行转换为仪表飞行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定位点及定位容差(FIX TOLERANCE)
定位点是指利用一个或一个以上的导航设备确定的地理位置点。( IAF、IF、FAF、等待点、TP、MAPt) Fixes and points used in designing flight procedures are normally based on standard navigation systems.
IAS-TAS例题
P7 例题1——直接查表获得K 例题2——内插法求得K,再计算 练习: H=2350M,ISA+15°C大气环境,IAS为400km/h,求TAS
1.1623 − 1.1329 K = 1.1329 + (2350 − 2000) = 1.1535 2500 − 2000 TAS = K × IAS = 1.1535 × 400 = 461.4
交叉定位定位容差
交差定位就是通过测定航空器与两个或两个以上导航 设备的相对方位或距离来确定航空器的位置。 交叉定位定位容差的大小决定于提供定位信息的导航 系统使用的精度。 决定系统精度的参数为:地面设备容差,机载接收系 统容差和飞行技术容差。 根据导航设备在定位时所起的作用,其交叉定位的误 差可分为:航迹引导误差和侧方定位误差。
B 260 287 3.29/3 1523
C 445 492 1.92 4090
D 465 514 1.84 4455
IAS TAS R r
转弯过程中风的影响
航空器在转弯过程中,由于无法利用导航设备控制航空 器的位置,在风的影响下必然要产生航迹的偏移
全向风及转弯风螺旋线
国际民航风 W =(12h + 87)km/h h为高度,单位:千米 或 =(2h+47)km/h h为高度,单位:千英寸 由于航空器方向不断变化,无法用某一固定风向来分析 整个转弯航段,因此采用全向风——风速一定,方向为任 意方向
★进近与复飞程序设计个航段使用NDB/VOR容差确定保护区的扩张
角时,使用±10.3/ ±7.8
DME测距精度
DME设备的测距精度 ±(0.46km(0.25NM)十1.25%D) D 为地面设备天线至机载设备天线的距离
交叉定位的容差
VOR/DME的定位容差
定位点对定位方法和定位容差的限制
1.
转弯参数(TURN PARAMETERS)
1. 2.
转弯真空速 v 转弯坡度α:飞机横轴与地平线的夹角
平均转弯坡度(α)的限制: 起始进近25°/目视盘旋20°/复飞航段15°
R=(6355tanα)/Πv (v单位为km/h) = (562tgα)/ V (v单位为m/s) = (3431tgα)/ΠV (v单位为kn) (≤ 3°/s) 4.转弯半径 r = V / 20ΠR (v单位为km/h,r为km) 使用的速度
航空器的分类(Classification of the aircraft)
跑道入口速度(Vat):航空器以最大着陆重量在着陆形态下 的失速速度的1.3倍。 航空器按其Vat的分为五类:A、B、C、D和E
A类: Vat<169km(91kt) YN-5、TB-200
B类:
169km(91kt) ≤Vat<224km
转弯参数计算举例
例:起始进近阶段,转弯高度1500米,温度ISA+15,求转弯率R和半径r 。
航空器类型
A 205
B 260
C 445
D 465
IAS TAS R r
转弯参数计算举例
例:转弯高度1500米,温度ISA+15,求转弯率R和半径r。
航空器类型
A 205 226 4.17/3 1200
LLZ定位容差
ILS航向台的航迹引导精度由以下三个参数组成: a)±1.0°地面监测设备容差包括波束弯曲; b)±1.0°机载设备容差; c)±2.0°飞行技术容差。 取以上三个数值的平方和根,即得ILS航向台的航迹引导容 差±2.4°。
侧方位定位容差与程序扩张角
提供侧方定位的导航台的精度 不考虑飞行技术容差! (向台背台的对正飞行) VOR NDB ILS航向台 ±4.5° ±6.2° ±1.4°
定位容差与容差区
1. 2. 3. 4. 定位容差区沿标称航迹的长度称为定位容差。 从进入定位容差区的最早点到标称点量取的长度为正容差d1 从标称点到飞出定位容差区的最晚点量取的长度为负容差d2 定位容差区:由于地面和机载设备的精度限制,以及飞行员 的飞行技术误差,航空器在定位时可能产生的偏差范围。
3.
转弯率
转弯参数
转弯坡度(α)与转弯率(R) 转弯率(R)的限制: 民用飞机应小于3°/S
说明:
1、R以平均25°(或20°/15°)坡度的计算值,或3°/S,两者取 较小者。 2、但R为25°时,真空速为315km/h,转弯率刚好等于3°/S,因此 但V>315,采用平均坡度25°,V≤315,利用3°/S
185 100 240 130 295 160 345
205 110 280 150 445 240 490 265 510 275
220/335(260*) 120/180(140*) 295/445 160/240 345/465 185/250 345/467 185/250
D
205 指示空速 185 445 240 425 230
使用交叉定位时,对导航台位置的限制 VOR/VOR 夹角应在30°~150° NDB/NDB 夹角应在45°~135° VOR/DME或NDB/DME 夹角应在0°~23°OR
2.
157°~180°
否则定位容差区较大
飞越导航台的定位容差
1. 飞越 VOR
d2
d1
•圆锥效应区(半径) •进入误差 •航向保持误差
飞越导航台的定位容差
2.飞越NDB
•圆锥效应区(半径) •进入误差 •航向保持误差
ILS指点标与”Z”指点标的容差
定位点的最低容差标准
第二课
概述-程序设计的基本参数和 最低扇区高度(MSA ) (4学时)
教学内容要点
(1)程序设计所使用的速度; (2)转弯参数; (3)航站区域定位点及容差; (4)MSA。
本课教学要求
(1)熟悉航空器分类的依据和有关概念,了解各航段使用的 速度范围和指示空速与真空速的换算方法; (2)理解仪表进近中转弯率与转弯坡度的限制,掌握转弯半 径的计算方法; (3)熟悉各类导航系统的精确度,基本掌握交叉定位和电台 上空定位的容差区确定方法,了解定位点的最低容差标准; (4)掌握MSA的定义和作用,熟悉扇区的划分和MSA的确定方 法。
指示空速(IAS)换算为真空速(TAS)的方法
K = 171233×[(288 + VAR)- 0.006496H ]0.5 ÷(288 – 0.006496H )2.628
式中:VAR = 相对于国际标准大气(ISA)温度的差值。如 ISA - 15°C,VAR = -15; H = 海拔高度,单位为米。
YN-7、AN-30
C类:
224km≤Vat<261km
A320、B737/757、 MD-82
D类:
261km≤Vat<307km
A340、B747 MD-11
E类:
307km≤Vat<390km
程序设计所使用的速度 程序设计
各航段所用的速度范围(表1-1),若给定的是某一速度 范围,以最大值为设计时所用速度; 指示空速与真空速的换算(表1-2) TAS=IAS*K 补充知识点ISA
ISA-30 0.9465 0.9690 0.9922 1.0163 1.0413 1.0672 1.0940 1.1219 1.1507 1.1807 1.2119 1.2443 1.2779 1.3130 1.3494 1.3873
ISA+30 1.0508 1.0770 1.1043 1.1325 1.1618 1.1923 1.2239 1.2568 1.2910 1.3266 1.3636 1.4022 1.4424 1.4843 1.5281 1.5737
E
指示空速(IAS)换算为真空速(TAS)的方法
高度 (m) 0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500 换 算 因 数(K) ISA-20 ISA-10 ISA ISA+1 ISA+15 ISA+20 0.9647 0.9825 1.0000 1.0172 1.0257 1.0341 0 0.9878 1.0063 1.0244 1.0423 1.0511 1.0598 TAS = K IAS 1.0118 1.0309×1.0497 1.0682 1.0774 1.0864 1.0366 1.0565 1.0760 1.0952 1.1046 1.1140 1.0623 1.0830 1.1032 1.1231 1.1329 1.1426 1.0890 1.1105 1.1315 1.1521 1.1623 1.1724 1.1167 1.1390 1.1608 1.1822 1.1928 1.2032 1.1455 1.1686 1.1912 1.2135 1.2245 1.2353 1.1753 1.1993 1.2229 1.2460 1.2574 1.2687 1.2063 1.2313 1.2558 1.2798 1.2917 1.3034 1.2385 1.2645 1.2900 1.3150 1.3273 1.3395 内插法?? 1.2720 1.2991 1.3256 1.3516 1.3644 1.3771 1.3068 1.3350 1.3627 1.3897 1.4031 1.4163 1.3430 1.3725 1.4013 1.4295 1.4434 1.4572 1.3808 1.4115 1.4415 1.4709 1.4854 1.4998 1.4201 1.4521 1.4835 1.5141 1.5292 1.5442