用数学方程描述的非圆曲线的轮廓数值计算
非圆曲线的等误差直线逼近
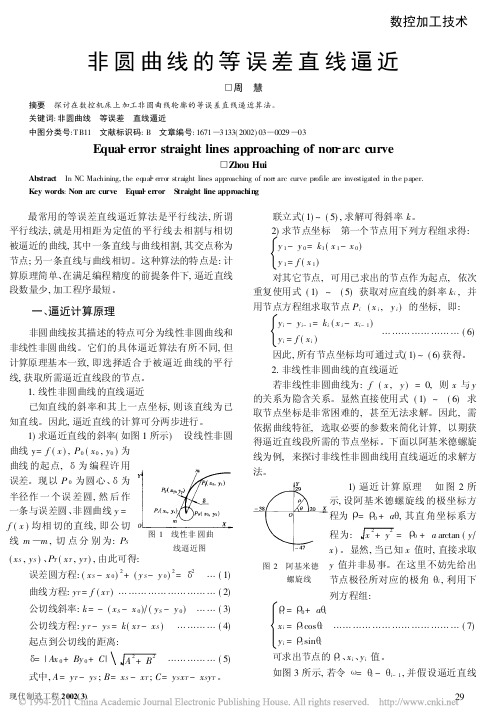
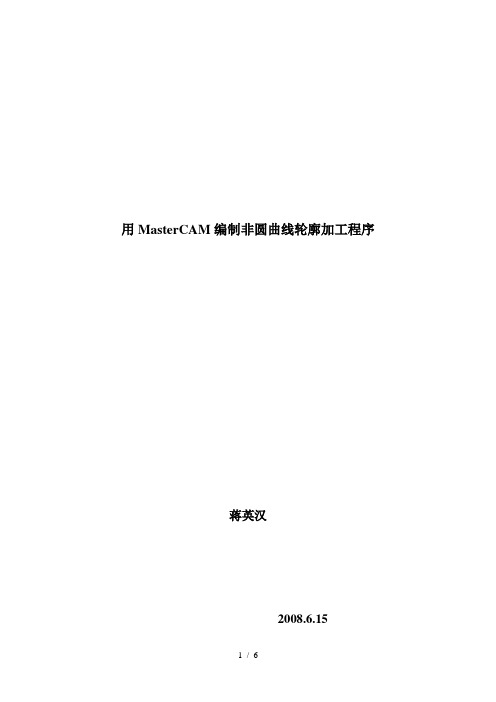
曲线 的起点, 为 编程许 用
误差。现以 P 0 为圆心、 为
半径作 一 个误 差圆, 然 后 作
一条与误差圆、非圆曲线 y =
f ( x ) 均相切的直线, 即公切
线 m m , 切 点 分 别 为: PS
图 1 线性非 圆曲 线逼近图
( xS , yS ) 、PT ( xT , yT ) , 由此可得:
The lapping and cutting experiment of the diamond tools
Song Jian Wu Minjing
Abstract In this paper, four types material of diamond( natural singe crystal、DEBEERS MONODITE、PCD、CVD) are applied in the ex periment. Some basic data is gained and emphatically discusses the experimental conclusion. In the lapping experiment, the lapping meth od and efficiency and integrity of diamond tool are comprised, While the super precise cutting is done. Key words: PCD tools CVD tools Natural diamond tools Surface finish
PCD 聚晶金刚石刀具、PCBN( 聚晶立方氮化硼) 切 削工具以及 CVD 薄膜与厚膜金刚石切削工具、类金刚 石膜( DLC) 、金刚石膜和 CBN 膜涂层切削工具有广阔 的应用前景, 尤其是精密和超精密加工技术发展对切 削工具的需求, 促使这些切削工具迅猛发展。
程序编制中的数学处理--非圆曲线节点的计算
程序编制中的数学处理--非圆曲线节点的计算数控系统一般只有直线和圆弧插补功能,对于非圆曲线轮廓,只能用直线或圆弧去逼近它。
节点就是逼近线段与非圆曲线的交点,也是个逼近线段的起点和终点。
一个已知曲线方程的节点数与逼近线段的形状(直线还是圆弧)、曲线方程的特性以及允许的逼近误差有关。
节点计算,就是利用这三者之间的数学关系,求解出各节点的坐标。
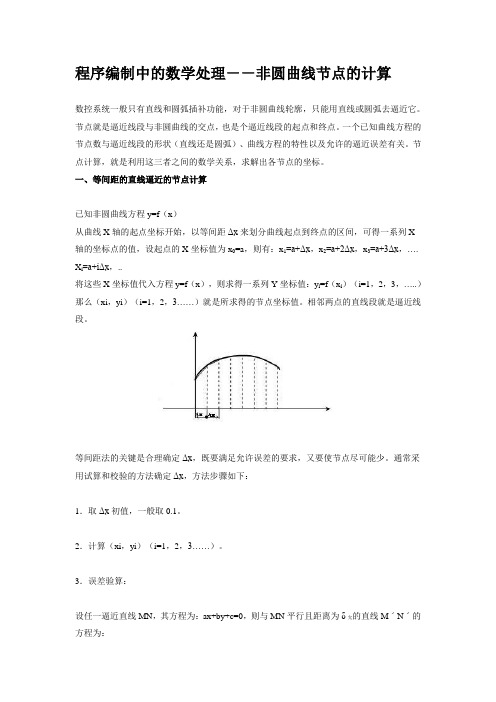
一、等间距的直线逼近的节点计算已知非圆曲线方程 y=f(x)从曲线X轴的起点坐标开始,以等间距Δx来划分曲线起点到终点的区间,可得一系列X 轴的坐标点的值,设起点的X坐标值为x0=a,则有:x1=a+Δx,x2=a+2Δx,x3=a+3Δx,…. X i=a+iΔx,..将这些X坐标值代入方程 y=f(x),则求得一系列Y坐标值:y i=f(x i)(i=1,2,3,…..)那么(xi,yi)(i=1,2,3……)就是所求得的节点坐标值。
相邻两点的直线段就是逼近线段。
等间距法的关键是合理确定Δx,既要满足允许误差的要求,又要使节点尽可能少。
通常采用试算和校验的方法确定Δx,方法步骤如下:1.取Δx初值,一般取0.1。
2.计算(xi,yi)(i=1,2,3……)。
3.误差验算:设任一逼近直线MN,其方程为:ax+by+c=0,则与MN平行且距离为δ允的直线MˊNˊ的方程为:求解联立方程:若:只有一个解,则逼近误差等于δ允,Δx正好满足误差要求。
没有解,则逼近误差小于δ允,Δx满足误差要求,可适当增大其取值,返回2。
有两个解,则逼近误差大于δ允,Δx太大,应减小其取值。
返回2。
等间距法计算简单,但由于必须保证曲线曲率最大处的逼近误差小于允许值,所以程序可能过多。
二、等弦长直线逼近的节点计算使所有逼近线段的长度相等。
计算步骤如下:(1)确定允许的弦长。
用等弦长逼近,最大误差δmax一定在曲线的曲率半径最小Rmin处,则为:(2)求Rmin。
曲线任一点的曲率半径为:取dR/dx=0,即根据求得,并由式(2-3)求得x后,将x值代入式(2-2)求、得Rmin。
用数学方程描述的非圆曲线的轮廓数值计算
用数学方程描述的非圆曲线的轮廓数值计算数控加工中把除了直线与圆弧之外用数学方程式表达的平面轮廓曲线称为非圆曲线。
非圆曲线的节点就是逼近线段的交点。
一个已知曲线)(x f y =的节点数目主要取决于所用逼近线段的形状(直线或圆弧)、曲线方程的特性以及允许的拟合误差。
将这三个方面利用数学关系来求解,即可求得相应的节点坐标。
下面简要介绍常用的直线逼近节点的计算方法。
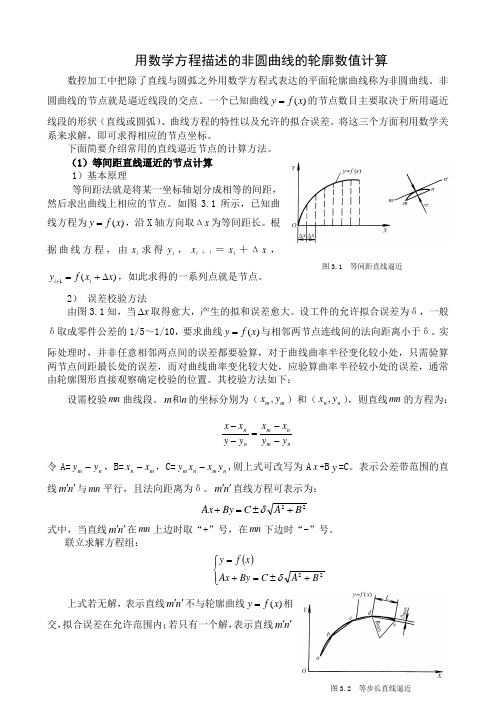
(1)等间距直线逼近的节点计算 1)基本原理等间距法就是将某一坐标轴划分成相等的间距,然后求出曲线上相应的节点。
如图3.1所示,已知曲线方程为)(x f y =,沿X 轴方向取Δx 为等间距长。
根据曲线方程,由i x 求得i y ,ix +1=i x +Δx ,)(1x x f y i i ∆+=+,如此求得的一系列点就是节点。
2) 误差校验方法由图3.1知,当x ∆取得愈大,产生的拟和误差愈大。
设工件的允许拟合误差为δ,一般δ取成零件公差的1/5~1/10,要求曲线)(x f y =与相邻两节点连线间的法向距离小于δ。
实际处理时,并非任意相邻两点间的误差都要验算,对于曲线曲率半径变化较小处,只需验算两节点间距最长处的误差,而对曲线曲率变化较大处,应验算曲率半径较小处的误差,通常由轮廓图形直接观察确定校验的位置。
其校验方法如下:设需校验mn 曲线段。
n m 和的坐标分别为(m m y x ,)和(n n y x ,),则直线mn 的方程为:nm n m nn y y x x y y x x --=--令A=n m y y -,B=m n x x -,C=n m n m y x x y -,则上式可改写为A x +B y =C 。
表示公差带范围的直线n m ''与mn 平行,且法向距离为δ。
n m ''直线方程可表示为:22B AC By Ax +±=+δ式中,当直线n m ''在mn 上边时取“+”号,在mn 下边时“-”号。
略谈数控加工中图形处理方法论文
略谈数控加工中的图形处理方法摘要:无论采用何种编程方法,对零件图进行数学处理、尤其对于非圆曲线的拟合加工,是数控编程的一个主要准备工作。
本文在讨论数控加工中的图形处理方法的基础上,给出正弦曲线手工编程的宏程序应用实例。
关键词:数控编程数学处理宏程序对零件图进行数学处理是编程前的主要准备工作之一,不但对手工编程来说是必不可少的工作步骤,而且即便采用计算机进行自动编程,也经常需要先对工件的轮廓图形进行数控预处理,才能对有关任何元素进行定义。
1 数控加工中的图形处理方法非圆曲线处理包括除圆以外的各种可以用方程描述的圆锥二次曲线(如抛物线、椭圆、双曲线)、阿基米德螺旋线、对数螺旋线各种参数方程、极坐标方程所描述的平面曲线与列表曲线等。
数控机床在加工上述各种曲线平面轮廓时,一般都不能直接进行编程,而必须经过数学处理以后,采用相互连接的直线逼近和圆弧逼近方法,才能通过设置宏变量和演算式,并引入加工程序,同时在加工程序中使用逻辑判断语句进行编程。
这里介绍常用的直线逼近的数值计算方法。
一般来说,由于直线逼近法的插补节点均在曲线轮廓上(图),容易计算,编程也简便一些,所以常用直线逼近法来逼近非圆曲线。
其缺点是插补误差较大,但只要处理得当还是可以满足加工需要的,关键在于插补长度及插补误差控制。
由于各种曲线上各点的曲率不同,如果要使各插补段长度均相等,则各段插补祯的误差大小不同。
反之,如果要使各段插补误差相同,则各插补段长度不等。
1.1 等间距直线逼近法等间距直线逼近法是在一坐标轴方向,将拟合轮廓的总增量(极坐标系中,指转角或径向坐标的总增量)进行等分后,对其设定节点所进行的坐标值计算方法,如图所示。
已知方程y=f (x),根据给定的△x求出xi,将xi代入y=f (x)即可求出一系列的(x0y0),…(xi,yi),即每个线段的终点坐标,并以该坐标值编制直线程序段。
△x取决于曲线的曲率和允许误差δ,一般δ取零件的1/5~1/10,验算的方法如图2所示。
非线性方程数值解法详解课件

例如,对于求解非线性方程$f(x)=0$的 应用实例中需要注意选择合适的初始近
根,可以先选择一个初始近似解$x_0$, 似解和设置合适的精度要求,以确保算
然后按照弦截法的迭代过程逐步逼近方
法能够快速收敛到真实解。
程的真实解。
05 共轭梯度法
共轭梯度法的原理
它利用共轭方向的概念,通过迭代过程中不断更新搜 索方向,使得函数值逐渐减小,最终找到方程的解。
牛顿法的实现步骤
确定初始点x0,计算f(x0)和f'(x0),如果f(x0)不等于0,则按照牛顿法的迭代公式 进行迭代,直到满足精度要求。
1. 选取初始点x0;2. 计算函数值f(x0)和导数值f'(x0);3. 如果f(x0)不等于0,则 按照牛顿法的迭代公式x1=x0-f(x0)/f'(x0)进行迭代;4. 重复步骤2和3,直到满 足精度要求。
以求解非线性方程为例,通过选择合 适的迭代法和初值,可以有效地求解 非线性方程的近似解。
03 牛顿法
牛顿法的原理
01
基于函数f(x)的泰勒级数的前两项, 通过迭代的方式逼近方程f(x)=0 的解。
02
牛顿法的基本思想是通过泰勒级 数的近似,将非线性方程f(x)=0 转化为线性方程,然后利用线性 方程的解来逼近非线性方程的解。
当达到预设的迭代次数或满足一定的收敛 条件时,停止迭代,输出结果。
共轭梯度法的收敛性分析
共轭梯度法具有全局收敛性和局部收敛性,即只要初始点 选择得当,算法能够找到方程的解,且在局部范围内具有 快速收敛的特点。
收敛性分析主要涉及算法的迭代矩阵和函数的性质,如连 续性和可微性等。
共轭梯度法的应用实例
牛顿法的收敛性分析
在一定的条件下,牛顿法是收敛的, 且具有二阶收敛速度。
用MasterCAM编制非圆曲线轮廓加工程序
用MasterCAM编制非圆曲线轮廓加工程序蒋英汉2008.6.15用MasterCAM编制非圆曲线轮廓加工程序关键词:自动编程、非圆曲线、NC程序中国一拖高级技工学校蒋英汉随着数字控制技术与数控机床出现,给机械制造业带来了翻天覆地的变化。
数控技术已成为制造业实现自动化、柔性化、集成化生产的基础技术。
自90年代至今我国的数控机床在机械制造业的占有率不断提高,在航天、军工模具等行业已经成为主要的加工手段。
现在数控技术已经成为体现一个国家综合国力水平的重要标志。
新世纪机械制造业的竞争,其实就是数控技术的竞争。
目前,我国的数控机床已经有了数量,但使用确不高,其原因,不能及时合理的编制出加工程序就是其中只一。
所以提高我国编程人员的编程能力已经是迫在眉睫了。
CAD/CAM技术则是建立在数控技术之上的一种科学,它对数控技术和数控机床的应用提供了一个坚实的平台。
为提高编程人员的编程能力提供了一个途径。
Ma ste rC AM 软件是美国的CNC Software公司开发的基于PC平台的CAD/CAM系统,由于它对硬件要求不高,并且操作灵活、易学易用并具有良好的价格性能比,因而深受广大企业用户和工程技术人员的欢迎,广泛应用于机械加工、模具制造、汽车工业和航天工业等领域,它具有二维几何图形设计、三维曲面设计、刀具路径模拟、加工实体模拟等功能,并提供友好的人机交互,从而实现了从产品的几何设计到加工制造的CAD/CAM一体化。
是目前世界上应用最广泛的CAD/CAM软件之一。
以下介绍MasterCAM在编制非圆曲线轮廓加工程序的应用:虽然非圆曲线轮廓可以在数控机床上用宏程序编制,但它对编程人员的编程能力要求特别高,时间周期较长,精度难以保证,而且不同系统的数控机床也不统用。
所以用CAD/CAM软件编制非圆曲线轮廓加工程序已经成了必然。
MasterCAM编制非圆曲线轮廓加工程序的主要步骤是:(一)设计非圆曲线方程式文件运用MasterCAM的方程式功能设计非圆曲线轮廓。
非球面轮廓测量与分析

a is the indexed Polynomial Coefficient a为多项式系数
C is the reciprocal of the Base Radius C为基圆半径的倒数
K is the Conic Constant of the Surface K为二次常数
Xp是指非球面光轴到轮廓最高点之间的距 离。
非球面参数简介
• Xt:
Xt is the distance of the aspheric axis from the measured data.
Xt是指非球面光轴到测量起始点之间的距 离。
非球面参数简介
• Xv:
Xv is the distance of the lowest valley from the aspheric axis .
6) Residual Error After Form Removal 形状去除之后的残余误差
+Z 轴
Aspherics axis 非球面轴线
+X 轴
-X轴
D=B-C(Residual error after
absolute aspheric form removal)
-Z 轴
去除绝对形状后的残余误差
• 之所以称为“锥面”项,是由于我们可以用 不同方位的面与圆锥相切可以得到以上表面
基本形式:球面(K=0)
相切面平行于圆锥底面
圆的标准方程: x2 y2 R2 (R 0)
基本形式:抛物面(K=-1)
相切面平行于圆锥侧面
抛物线标准方程 : y2 2 px或y2 2 px或 x2 2 py或x2 2 py( p 0)
基于Matlab的非圆行星齿轮机构节曲线求解
基于Matlab 的非圆行星齿轮机构节曲线求解李 磊,杜长龙,杨善国(中国矿业大学机电工程学院,江苏徐州221008)摘要:合理的节曲线设计是可用于低速大扭矩液压马达的变中心距非圆行星齿轮机构正常工作的关键。
非圆太阳轮的节曲线由椭圆演变而来,非圆内齿圈的节曲线通过非圆行星齿轮机构的转化机构求解。
在理论分析的基础上,采用Matlab 为工具,以某型变中心距非圆行星齿轮机构为例对其节曲线进行了求解。
关键词:节曲线;非圆行星齿轮;Matlab 中图分类号:TH1321425 文献标志码:A 文章编号:100320794(2008)0120023203Solving of N on -circular Planetary G ear Pitch Curve B ased on MatlabLI Lei ,DU Ch ang -long ,YANG Sh an -guo(C ollege of Mechanical and E lectronic Engineering of China University of M ining and T echnology ,Xuzhou 221008,China )Abstract :Appropriate pitch curve designing is a key of regularly w orking for non -circular planetary gear mechanism with variable center distance which can be used in low speed high torque hydraulic m otor.The pitch curve of sun gear is ev olved from ellipse and that of internal gear is s olved through the invert mechanism of the non -circular planetary gear mechanism.The pitch curve of a non -circular planetary gear mechanism with variable center distance is s olved with Matlab based on the theory analysis.K ey w ords :pitch curve ;non -circular planetary gear ;Matlab0 前言1977年波兰人B.Sieniawski 开发出了S OK 型非圆行星齿轮低速大扭矩液压马达,相比于传统的低速大扭矩液压马达具有结构简单、体积重量小、效率高及对污染敏感性低等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用数学方程描述的非圆曲线的轮廓数值计算
数控加工中把除了直线与圆弧之外用数学方程式表达的平面轮廓曲线称为非圆曲线。
非圆曲线的节点就是逼近线段的交点。
一个已知曲线)(x f y =的节点数目主要取决于所用逼近线段的形状(直线或圆弧)、曲线方程的特性以及允许的拟合误差。
将这三个方面利用数学关系来求解,即可求得相应的节点坐标。
下面简要介绍常用的直线逼近节点的计算方法。
(1)等间距直线逼近的节点计算 1)基本原理
等间距法就是将某一坐标轴划分成相等的间距,然后求出曲线上相应的节点。
如图3.1所示,已知曲线方程为)(x f y =,沿X 轴方向取Δx 为等间距长。
根据曲线方程,由i x 求得i y ,i
x +1
=i x +Δx ,
)(1x x f y i i ∆+=+,如此求得的一系列点就是节点。
2) 误差校验方法
由图3.1知,当x ∆取得愈大,产生的拟和误差愈大。
设工件的允许拟合误差为δ,一般δ取成零件公差的1/5~1/10,要求曲线)(x f y =与相邻两节点连线间的法向距离小于δ。
实际处理时,并非任意相邻两点间的误差都要验算,对于曲线曲率半径变化较小处,只需验算两节点间距最长处的误差,而对曲线曲率变化较大处,应验算曲率半径较小处的误差,通常由轮廓图形直接观察确定校验的位置。
其校验方法如下:
设需校验mn 曲线段。
n m 和的坐标分别为(m m y x ,)和(n n y x ,),则直线mn 的方程为:
n
m n m n
n y y x x y y x x --=--
令A=n m y y -,B=m n x x -,C=n m n m y x x y -,则上式可改写为A x +B y =C 。
表示公差带范围的直线n m ''与mn 平行,且法向距离为δ。
n m ''直线方程可表示为:
2
2
B A
C By Ax +±=+δ
式中,当直线n m ''在mn 上边时取“+”号,在mn 下边时“-”号。
联立求解方程组:
()⎪⎩⎪⎨⎧+±=+=2
2B
A C By Ax x f y δ
上式若无解,表示直线n m ''不与轮廓曲线)(x f y =相交,拟合误差在允许范围内;若只有一个解,表示直线n m '
'图3.1 等间距直线逼近
图3.2 等步长直线逼近
与)(x f y =相切,拟合误差等于δ;若有两个解,且m x ≤x ≤n x ,则表示超差,此时应减小x ∆重新进行计算,直到满足要求为止。
(2) 等步长直线逼近的节点计算
这种计算方法是使所有逼近线段的长度相等,从而求出节点坐标。
如图3.2所示,计算步骤如下:
1) 求最小曲率半径min R 曲线)(x f y =上任意点的曲率半径为:
y y R '
''+=
2
/32
)
1(
取0/=dx dR ,即:
0)1(32
2
=''''--'''y y y y
根据)(x f y =求得y '、y ''、y ''',并代入上式得x ,再将x 代入前式求得min R 。
2)确定允许的步长l 由于曲线各处的曲率半径不等,等步长后,最大拟合误差max δ必在最小曲率半径min R 处。
因此步长应为:
δδmin 2
min 2
min 8)(2R R R l ≈
--=
3)计算节点坐标 以曲线的起点),(a a y x a 为圆心,步长l 为半径的圆交)(x f y =于b 点,求解圆和曲线的方程组:
⎩⎨
⎧==-+-)
()()(2
22x f y l y y x x a a 求得b 点坐标),(b b y x 。
顺序以b 、c ……为圆心,即可求得c 、d ……各节点的坐标。
由于步长l 决定于最小曲率半径,致使曲率半径较大处的节点过密过多,所以等步长法适用于曲率半径相差不大的曲线。
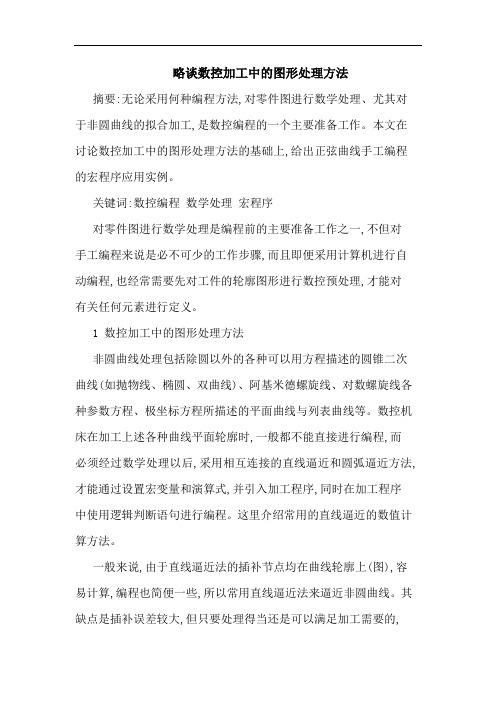
(3)等误差直线逼近的节点计算
等误差法就是使所有逼近线段的误差δ相等。
如图3.3所示,其计算步骤如下: 1)确定允许误差δ的圆方程 以曲线起点),(
a a y x a 为圆心,δ为半径作圆,此圆方程式为:
2
2
2
)
()(δ
=-+-a a y y x x
2)求圆与曲线公切线PT 的斜率k
P
T P T x x y y k --=
图3.3 等误差直线段逼近
其中T x 、P x 、T y 、P y 由下面的联立方程组求解:
a
P a P P
T P T y y x x x x y y ---
=-- (圆切线方程)
a a P P y x x y +--=
2
2
)(δ
(圆方程)
)(T P
T P T x f x x y y '=-- (曲线切线方程)
)(T T x f y = (曲线方程)
3)求弦长ab 的方程 过a 作直线PT 的平行线,交曲线于b 点,ab 的方程为:
)(a a x x k y y -=-
4)计算节点坐标 联立曲线方程和弦长方程即可求得b 点坐标),(b b y x 。
)
()(x f y x x k y y a a =-=-
按上述步骤顺次求得c 、d 、e ……各节点坐标。
由上可知,等误差法程序段数目最少,但计算较复杂,可用计算机辅助完成。
在采用直线逼近非圆曲线的拟合方法中,是一种较好的方法。