机械原理实验回转件动平衡
回转构件动平衡实验报告

回转构件动平衡实验报告回转构件动平衡实验报告一、引言回转构件是一种常见的机械零件,广泛应用于各种机械设备中。
在实际应用中,回转构件的动平衡是确保其正常运行的重要因素之一。
本实验旨在通过回转构件动平衡实验,探究回转构件的动平衡原理和方法,并对实验结果进行分析和总结。
二、实验目的1.了解回转构件的动平衡原理和方法;2.学习使用动平衡仪器进行实验;3.掌握实验数据处理和分析方法。
三、实验装置和方法实验装置主要包括回转构件、动平衡仪器和相应的测量工具。
实验方法如下:1.将回转构件安装在动平衡仪器上,并调整好水平;2.启动动平衡仪器,进行初始测量,记录下回转构件的初始不平衡量;3.根据实验要求,在回转构件上添加适量的平衡块,再次进行测量;4.重复步骤3,直到回转构件的不平衡量达到规定范围。
四、实验结果和分析经过多次实验,我们得到了一系列实验数据。
将这些数据进行整理和分析,可以得到如下结论:1.回转构件的不平衡量与平衡块的质量和位置有关。
当平衡块质量适当,位置合理时,回转构件的不平衡量可以减小到规定范围内;2.不同类型的回转构件,其动平衡方法和要求也有所不同。
在实际应用中,需要根据具体情况选择合适的动平衡方法;3.动平衡仪器的准确性和稳定性对实验结果的影响较大。
因此,在实验过程中,需要注意仪器的使用和维护。
五、实验总结通过本次回转构件动平衡实验,我们对回转构件的动平衡原理和方法有了更深入的了解。
同时,我们也学会了使用动平衡仪器进行实验,并掌握了实验数据处理和分析方法。
这对我们今后的学习和工作都具有重要的意义。
六、存在的问题和改进措施在实验过程中,我们也遇到了一些问题,主要包括仪器使用不熟练、数据处理不准确等。
为了改进实验效果,我们可以采取以下措施:1.加强对动平衡仪器的使用培训,提高操作的熟练度;2.在实验过程中,严格按照操作规程进行,确保数据的准确性;3.加强团队合作,共同解决实验中的问题。
七、展望回转构件动平衡技术在机械领域有着广泛的应用前景。
回转构件的动平衡实验

实验8 回转构件的动平衡实验之二一、回转体产生不平衡的原因对于作定轴转动的构件,由于设计、制造、装配以及材质不均匀等原因,会使回转件结构不对称,也就是回转轴线与其中心主惯性轴线不重合,此时构件上各点所产生的惯性力可以合成为质心的惯性主矢和惯性主矩,这种现象称其为不平衡现象。
存在不平衡现象的回转构件运动过程中,会产生一种附加的动压力,该力会使整个机械产生周期性振动和噪声,此振动降低了工作精度和可靠性。
因此,必须采用平衡配重的方法,以减少乃至消除动压力,保证回转件的正常工作。
根据刚性转子的宽度b 和其直径D 的比值对不平衡现象分类:当刚性转子的宽径比2.0/<D b 时,可以认为其质量均集中在一个通过质心的垂直平面内。
对于这类刚性转子,可称作静平衡。
而当宽径比2.0/≥D b 时,由于转子的质量不能认为分布在同一个转动平面内,所以必须同时考虑其惯性力和惯性力所形成的惯性力矩的平衡,这时就需要对转子进行动平衡实验。
下面主要介绍回转体的动平衡实验。
二、实验目的1.巩固和验证刚性回转件动平衡理论和方法;2. 掌握动平衡机的基本工作原理及运用动平衡机进行平衡的调节方法;3.了解动平衡精度的基本概念。
三、实验内容及要求1.选定动平衡机转子的装载形式,确定两支撑平面的位置。
2.在已知动平衡的转子上面添加不平衡质量,测定不平衡质量的大小和相位。
开动动平衡机,测定转子的不平衡质量大小与相位与实际值进行比较。
四、实验设备及工具1.YYQ —160型硬支撑动平衡机; 2.天平;3.钻床;4.待平衡的转子; 5.不同质量的试件。
五、实验原理动平衡的基本原理就是利用动平衡机测出转子偏心质量的大小及位置,并在相应位置添加或在相对位置减小对应质量值,从而消除由此质量所产生的离心惯性力及惯性力偶矩,达到转子的运转平衡。
动平衡实验在专用的动平衡实验机上进行。
各种动平衡机的构造和工作原理不尽相同,但其作用都是用来确定在两个平衡平面中需加的平衡质量的大小和方位。
回转构件动平衡实验

实验7 回转构件动平衡实验回转构件动平衡是现代机械的一个重要问题,尤其是高速机械在运转时,所产生的不平衡惯性力将在运动副中引起附加的动压力,这不仅会增大运动副中的摩擦和构件中的内应力,也会降低机械效率和使用寿命。
因此,掌握回转构件动平衡的原理和方法具有特别重要的意义。
一、 实验目的巩固回转构件动平衡的基本概念,熟悉补偿式动平衡机的基本工作原理及操作方法。
二、 设备和工具框架式动平衡机;试件-转子;平衡重量;普通天平;卡尺;钢尺。
三、 原理和方法理论上已阐明,任何回转构件的动平衡,都可以认为是分别处于两个任意选定的回转平面T '和T ''内的不平衡重量0G '和0G ''所产生。
因此进行平衡实验时,便可以不管被平衡构件的实际不平衡重量所在平面及其大小如何,只需要根据构件实际外形的许可选择两回转平面作为平衡效正平面,且把不平衡重量看作处于该平面之中的0G '和0G ''。
然后针对0G '和0G ''进行平衡就可以达到目的。
本实验用框架式动平衡机,它利用补偿重径积法测定平衡平面中的不平衡重量0G '和0G ''的大小和相位。
图7—1 框架式动平衡机框架式动平衡机的结构如图7—1所示,框架1经弹簧2与固定的底座3相联,它只能绕OX 轴线摆动,构成一个振动系统,框架上装有主轴4,由固定在底座上的电动机14通过传动带和带轮12驱动,主轴4上装有主轴螺旋齿轮6,它和齿轮5齿数相等。
互相啮合的齿轮6还可以沿主轴4移动,移动的最大距离和它的轴向宽度相等,它大于齿轮5的节圆周。
因此,调节手轮18,使齿轮6从左极端位置移动到右极端位置时,齿轮5及和它固定的轴9可以回转一周以上,借此调节两圆盘的k φ,k φ的大小由指针15指示。
圆盘7固定的1轴9上,通过调节手轮17可以使圆盘8沿轴9上下移动,以调节两圆盘距离k l ,k l 由指针16指示。
回转体的动平衡(机械原理)

回转体的动平衡(机械原理)回转体的动平衡是指在旋转时,使回转体的重心与转轴重合,旋转轴线不会发生晃动的过程。
动平衡对于回转体的稳定性和运行效率起着关键的作用。
因此,在机械设计和生产过程中,我们必须考虑如何实现回转体的动平衡。
1.回转体的稳定性分析回转体的稳定性是指在旋转过程中,所需要的力矩达到平衡的状态。
我们可以用扭矩的概念来描述其稳定性。
扭矩是指在回转体的一个轴上作用的旋转力矩。
在回转体不平衡的情况下,因为重心偏离转轴,所以会产生一个旋转力矩。
而这个力矩会使回转体围绕转轴旋转,导致旋转过程中发生晃动。
如果扭矩的大小超过回转体的惯性矩,则回转体就会失去稳定性。
因此,我们需要通过调节回转体的结构或增加平衡配重等方式,来降低旋转过程中的动态不平衡。
2.解决方案(1)静平衡静平衡是指回转体不旋转情况下的平衡状态。
在静态平衡时,我们仅考虑回转体各部分重量的平衡。
可以通过增加平衡配重等方式,将剩余不平衡分布在不同的位置上。
在设计过程中,我们可以利用有限元分析软件进行模拟,确定平衡配重的位置和数量。
对于一些大型机械,我们还可以进行试重实验,通过对加入不同位置调整重量的回转体进行测试,找出合适的平衡点。
动平衡是指回转体在旋转情况下的平衡状态。
它是通过旋转平衡技术来实现的。
旋转平衡技术可以精确地测量回转体的不平衡,并根据测量结果进行动态平衡。
在动平衡的过程中,我们需要先对回转体进行低速旋转测试,测量不平衡力和相位。
根据测量结果,我们可以计算出平衡配重的量和位置。
然后,我们会将平衡配重加到回转体上,再进行高速测试,直到回转体的扭矩达到平衡状态。
对于一些高精度、高速运转的回转体,如旋转光器等,静平衡往往无法满足要求。
这时候就需要采用动平衡技术,才能获得稳定的运行效果。
3.结论在机械设计和生产中,实现回转体的动平衡至关重要。
只有通过静平衡和动平衡技术的应用,我们才能确保回转体的稳定性和运行效率。
因此,在机械设计中,我们务必要充分考虑回转体稳定性的问题,选择合适的平衡技术来保证机械产品的质量和可靠性。
机械设计基础之回转构件的平衡

机械设计基础之回转构件的平衡回转构件是机械设计中常见的一种构件类型,它具有旋转运动的特点。
在机械设计中,回转构件的平衡是一个十分重要的问题。
平衡是指在回转构件旋转运动过程中,构件各部分的质量分布均匀,使得构件在高速旋转时不会产生过大的离心力和不平衡力,从而保证机械的正常运行和使用寿命。
1. 平衡的基本原理回转构件的平衡主要是通过调整构件的质量分布来实现的。
平衡要求构件质量的中心轴线与构件旋转轴线重合,以保持构件的稳定。
平衡可分为静平衡和动平衡两种情况。
•静平衡:在静止条件下,构件的重心要与轴线保持对称分布。
这时,构件旋转时只会产生离心力,不会产生不平衡力。
静平衡是最基本的平衡要求。
•动平衡:在运动状态下,构件的质量分布要满足一定的条件。
除了重心与轴线保持对称分布外,构件其他部分的质量分布也要满足一定的规律。
这样可以减小构件在高速旋转时产生的不平衡力,提高机械的使用寿命。
2. 平衡的方法和措施2.1 质量补偿法质量补偿法是最常用的平衡方法之一。
它通过在回转构件上增加或减少质量,来实现平衡。
有两种常见的质量补偿方法:质量块法和钻孔法。
•质量块法:在构件上增加质量块来实现平衡。
质量块的大小和位置应根据构件具体情况进行合理选择。
在计算时,通常使用静平衡方程来确定质量块的质量和位置,使得构件满足平衡条件。
质量块的安装一般采用焊接、螺栓等方式固定在构件上。
•钻孔法:在构件上钻孔来减小构件的质量,从而实现平衡。
钻孔的位置和直径应根据构件的质量分布情况和平衡要求来确定。
在计算时,通常使用动平衡方程来确定钻孔的直径和位置,使得构件满足平衡条件。
钻孔后,需要对构件进行动平衡试验,进一步进行微调。
2.2 弹簧平衡法弹簧平衡法是一种自调整的平衡方法。
它通过在回转构件上安装弹簧,使得构件在旋转时,弹簧可以自动调节和补偿不平衡力。
弹簧平衡法的优点是简单易行,不需要对构件进行大幅度改动。
弹簧平衡法的基本原理是利用弹性形变,将构件的不平衡力转化为弹簧的伸缩变形。
实验:回转件的动平衡

与主轴 4 的相对转角 c , c 的大小由指针 15 指示。圆盘 7 固定在轴 9 上,通过调节手轮 17 可以使圆盘 8 沿轴 9 上下移动,以调节两圆盘间的距离 lc,lc 由指针 16 指示。圆盘 7、8 本身大小、重量完全相等,上面各装—重量为 Gc 的重块,其重心都与轴线相距 rc ,但相位 差 180 。安装时应使指针 15 处于包括两重量 Gc 和轴 9 的平面内,且与 Gc 所产生的离心力 偶矩的旋向一致。 将要平衡的试件 10 架于两个滚动支承 13 上,通过挠性联轴器 11 由主轴 4 带动。当选 取平面 T 和 T 为平衡校正面后, 试件 10 的不平衡重可以看作平面 T 和 T 内回转半径 r0
c = 180 时,M0 与 Mc 同向,两力矩正向叠加,框架振幅最大;当调节 c 时,两力
矩反向叠加,框架振幅最小。这对不平衡重量的相位已经基本找到,再继续调整手轮 17, 即改变 lc 。如此反复调整数次,直到指针不动,此对框架振动消除。 5、停车、读出 lc 和 c 的数值,计算不平衡重径积的大小,并确定它的相位。 6、根据你所确定的不平衡重量试件经校正后再开车观察平衡效果。 7、重复上述各步骤,即可用同一方法平衡试件的另一平衡平面。 (二)DS 一 100B 型闪光式动平衡试验机 l、把试件放在摇摆架的 V 形槽支承上,将选择好的传动带套在试件的外径上,并使其 垂直拉紧。注意拉紧的程度刚好能使试件稳定旋转为准不能过紧或过松。 2、接通总电源与电测部分的电源,预热 l~2 分钟。 3、启动电动机,使试件转动。 4、将“输入衰减”开关指向Ⅰ挡,若电表超过满刻度,则将开关顺次转向高倍衰减位 置,以减弱输入讯号。 5、将“频率范围”开关置于与试件转速相应的转速档,每档对应的转速,见下表所载。 转 DS—30 型 1000—2000 1800—2900 3100—4300 速 (分/转) DS—100 型 >1700 <2700 ───────
回转体零件的动平衡实验
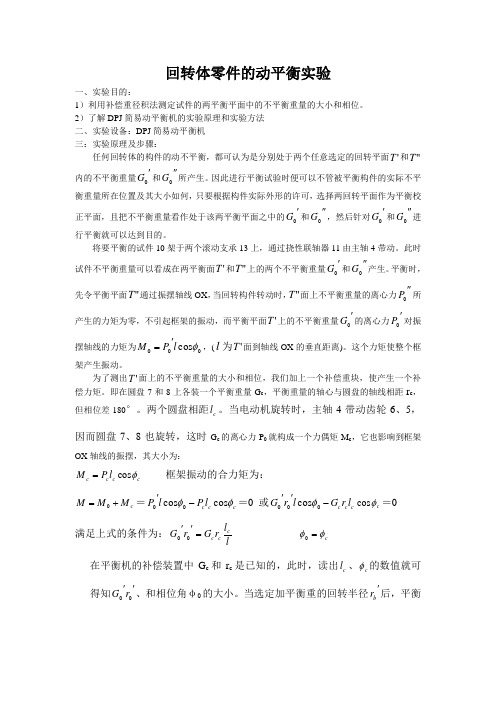
回转体零件的动平衡实验一、实验目的:1)利用补偿重径积法测定试件的两平衡平面中的不平衡重量的大小和相位。
2)了解DPJ 简易动平衡机的实验原理和实验方法 二、实验设备:DPJ 简易动平衡机 三:实验原理及步骤:任何回转体的构件的动不平衡,都可认为是分别处于两个任意选定的回转平面'T 和"T 内的不平衡重量'0G 和"0G 所产生。
因此进行平衡试验时便可以不管被平衡构件的实际不平衡重量所在位置及其大小如何,只要根据构件实际外形的许可,选择两回转平面作为平衡校正平面,且把不平衡重量看作处于该两平衡平面之中的'0G 和"0G ,然后针对'0G 和"0G 进行平衡就可以达到目的。
将要平衡的试件10架于两个滚动支承13上,通过挠性联轴器11由主轴4带动。
此时试件不平衡重量可以看成在两平衡面'T 和"T 上的两个不平衡重量'0G 和"0G 产生。
平衡时,先令平衡平面"T 通过振摆轴线OX ,当回转构件转动时,"T 面上不平衡重量的离心力"0P 所产生的力矩为零,不引起框架的振动,而平衡平面'T 上的不平衡重量'0G 的离心力'0P 对振摆轴线的力矩为000cos φl P M'=,(l为'T 面到轴线OX 的垂直距离)。
这个力矩使整个框架产生振动。
为了测出'T 面上的不平衡重量的大小和相位,我们加上一个补偿重块,使产生一个补偿力矩。
即在圆盘7和8上各装一个平衡重量G c ,平衡重量的轴心与圆盘的轴线相距r c ,但相位差180°。
两个圆盘相距cl 。
当电动机旋转时,主轴4带动齿轮6、5,因而圆盘7、8也旋转,这时G c 的离心力P 0就构成一个力偶矩M c ,它也影响到框架OX 轴线的振摆,其大小为:cc c cl P Mφcos = 框架振动的合力矩为:c MMM +=0=c c c l P l P φφcos cos 00-'=0 或c c c l r G l r G -''000cos φcφcos =0满足上式的条件为:ll r G r G cc c =''00φφ=0在平衡机的补偿装置中G c 和r c 是已知的,此时,读出c l 、c φ的数值就可得知''00r G 、和相位角φ0的大小。
4回转件的动平衡
(1)如果该空间力系达到平衡,由理论力 学知,各离心力的合力和合力矩应等于 零。该回转件达到动平衡; (2)如果该空间力系达不到平衡,由理 论力学知,各离心力的合力和合力矩应 不等于零。该处于动不平衡。
• 动平衡的条件:各离心力的合力和合力 矩应等于零 。 • 动平衡的方法:双面平衡
注意:由于动平衡条件中同时包含了静平 衡的条件。所以,达到动平衡的转子也一 定是静平衡的;但达到静平衡条件的转子 不一定是动平衡的,这一点必须注意。对 于B/D≤1/5的转子,若达到静平衡以后, 也可近似地认为达到了动平衡。
Hale Waihona Puke 5.3车轮与轮胎的平衡车轮与轮胎是高速旋转组件,如果不平衡, 汽车在超过某一速度行驶特别是高速公路上行驶的 车辆,可能造成轮胎爆破,引发交通事故。不平衡 也会引起底盘零部件损伤,如转向球节上的磨损增 加,减振器和其他悬架元件的变形等。就车轮本身 而言,由于装有气门嘴,同时还与轮胎和传动轴等 传动系的旋转部件组装在一起,因此必须进行平衡, 否则,不平衡在所难免。 新车上安装的车轮与轮胎都经过了平衡,随着 车辆的行驶及轮胎的维护或修理,如果轮胎有不均 匀或不规则磨损、车轮定位失准,车轮平衡维护就 是必须要做的工作,平衡车轮时,沿轮辋分配配重, 抵消车轮和轮胎中的重的部位,使它平稳滚动而无 振动。
5.2 回转件的动平衡
对于B/D>1/5的回转件,如内燃机曲轴、 汽车传动轴、汽车轮胎总成等,因其轴向尺 寸较大,不能再近似地认为其质量都位于同 一回转面内,这时若有不平衡质量存在,则 必须看作是分布在垂直于轴线的若干个互相 平行的回转面内。因而,回转件转动时各不 平衡质量产生的离心力不再是平面汇交力系, 而是一个空间的平行力系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理实验— 机械原理实验—回转件动平衡
平衡实例
机械原理实验— 机械原理实验—回转件动平衡
四.实验方法
1.安装转子,传动带绕法如图; 2.在接通电源开关或按“退出”键以后,测量仪进入自检 过程, 一切正常以后,指示面板显示: Bal —20H
…
转子
电机带轮
机械原理实验— 机械原理实验—回转件动平衡
机械原理实验— 机械原理实验—回转件动平衡
机械原理实验
机械工程学院 机械基础实验室
机械原理实验— 机械原理实验—回转件动平衡
机 械 原 理
实验
回转件动平衡
机械原理实验— 机械原理实验—回转件动平衡
一.实验目的
1.通过调整回转件的质量分布,消除或减小由于惯性力或惯性 .通过调整回转件的质量分布, 力偶所产生的动压力,从而消除或减小周期性的机械振动; 力偶所产生的动压力,从而消除或减小周期性的机械振动; 2.熟悉转子动平衡的基本方法和工业动平衡机的工作原理。 .熟悉转子动平衡的基本方法和工业动平衡机的工作原理。
mbΙΙ
l1
平衡孔
平衡块
机械原理实验— 机械原理实验—回转件动平衡 回转件的动平衡在动平衡试验机上完成,工业动平衡机种类 很多,但它们的组成及工作原理基本相同,其组成部分有机架、 两个回转工件支架、两个支架振动传感器、基准信号发生器和测 试仪。 将不平衡的工件安装在支架上并转动,工件及支架将产生 振动,由安装在支架上的传感器拾取此振动信号,并同基准信号 发生器产生的基准信号一同送入测试仪; 传感器产生的振动信号为正弦信号,其振幅反映了引起振 动的不平衡量的大小,它与基准信号的相位差代表了不平衡质量 相对于基准位置的角度,从而可以确定不平衡质点的位置; 由测试仪对信号进行处理、运算,并输出处理结果——两 个校正平面内的不平衡量的大小和位置。 分别在两个校正平面内根据测试结果去除或增加相应的质量, 使工件的质量重新分布,使其各质量产生的离心力的合力和合力 偶都等于或小于允许值,使工件达到动平衡。
二.实验设备
1、 YYQ-16及YYQ-50型硬支承平衡机; 、 型硬支承平衡机; 及 型硬支承平衡机 2、 YYW-300A型硬支承平衡机; 、 型硬支承平衡机; 型硬支承平衡机 3、 RYS-30及RYS-5A型闪光式软支承平衡机。 、 型闪光式软支承平衡机。 及 型闪光式软支承平衡机
机械原理实验— 机械原理实验—回转件动平衡
五.思考题
1、振动信号是如何产生和拾取的? 2、基准信号是如何产生的,起什么作用? 3、确定校正平面时应考虑哪些因素?
六. 实验报告
1、自拟实验报告,格式不限; 2、回答思考题。
三.动平衡实验原理及方法
回转件的动平衡,通过在任选的两个校正平面上增加或减 少一定的质量,使工件的质量重新分布,使其质量分布中心与 回转轴线重合,消除不平衡质量产生的离心力及其力偶。
L
FI 2ΙΙ
m2 r2 FI 2Ι
FI 3Ι
ห้องสมุดไป่ตู้
mbΙΙ
r 1 m 1
r3 m3
l2
FI 3ΙΙ
F 1ΙΙ I
ΙΙ
l3
FI1Ι