圆弧形柔性铰链式二维并联压电微动平台的设计【文献综述】
二维柔性铰链机械设计及特性分析
1 引 言
柔性铰链是 一 种新 型 的微传 动 、支撑 机构 ,具 有 体积 小 、无摩擦 、运动间隙小和分 辨率 高等优点 ,在现代制造业 中的微型机械领域 已得到了广泛的应用 。基 于压 电陶瓷驱动 的二维柔性铰链驱动平台以其不可替代的优越性 能,在超精 密测量和超精密加工中的应用也 已日益广泛。 微动平台整体控制结构 如图 1 所示 ,该 微动 平台采 —1 用柔性铰链传动 ,用压电陶瓷驱动器作为驱 动源,并通过接 口与计算机连接 。本文主要针对二维柔 性铰链微动平 台单元 进行分析 ,从柔性铰链转角刚度公式的推导、柔性铰链尺寸 参数对转角刚度的影响 、柔性铰链尺寸参数 的力 学要求 、微 位移机构 的方案确定 、静态刚度公式的推导 、 寸参数的确 尺 定 、材料的选择和加工方法等方面进行分析。
维普资讯
九 江 职 业 技 术 学 院 学 报
1 2
2 0 4 0 6.
Jun l f i i gVcainl Teh i l ol e o r a o u a  ̄ t a & J jn o c nc l g aC e
二 维 柔 性 铰 链 机 械 设 计 及 特 性 分 析
上 一 盘
b / J
, ,
l L+f 、] 0一『 ’, 23 \ 1 (
简化公式 ( —3 ,并与式 ( —2 2 ) 2 )合并整理 得 :
0 d
x
=
j x』 如 毒d =
・
(4 2) -
( -5 2 )
把 M ( )看成常数 。将式 ( —4 x 2 )直 角坐标 系变换成 极坐标可得到柔性铰链转角公式 :
割的方 法加工 出孔和缝隙 ,使圆弧切 口形成 弹性 支点 ,并 通 过它把绕轴作 复杂运动的有限角位移转换成 柔性支承系统 的 直线运动 。图 2 一l为单轴双弧柔性铰链的外形 图。
二维解耦柔性精密定位平台设计
二维解耦柔性精密定位平台设计李茂;毕树生;王玉亮;李晓来【摘要】设计了一款基于压电陶瓷和柔性铰链的二维解耦精密定位平台,平台采用对称布置的双平行四杆复合机构实现解耦.基于Awtar模型,对平台载荷-位移关系进行分析,推导出平台在X、Y方向上的位移及耦合位移表达式.ANSYS有限元仿真表明,最大耦合发生在平台最大为一处.在平台位移最大时,理论计算的耦合误差达到最大,为0.39%.这与有限元仿真分析得到的0.33%的结果接近.最后,利用显微视觉测量方法对平台X和Y方向的耦合误差进行了实验测试,实验结果表明,耦合误差随着平台运动位移的增大而增大,最大值为1.8%,与理论仿真趋势吻合.【期刊名称】《机械设计与制造》【年(卷),期】2015(000)011【总页数】5页(P26-30)【关键词】耦合误差;解耦;压电陶瓷;柔性铰链;精密定位【作者】李茂;毕树生;王玉亮;李晓来【作者单位】北京航空航天大学机器人研究所,北京100191;北京航空航天大学机器人研究所,北京100191;北京航空航天大学机器人研究所,北京100191;北京航空航天大学机器人研究所,北京100191【正文语种】中文【中图分类】TH16;TP242摘.:设计了一款基于压电陶瓷和柔性铰链的二维解耦精密定位平台,平台采用对称布置的双平行四杆复合机构实现解耦。
基于Awtar模型,对平台载荷-位移关系进行分析,推导出平台在X、Y方向上的位移及耦合位移表达式。
ANSYS有限元仿真表明,最大耦合发生在平台最大为一处。
在平台位移最大时,理论计算的耦合误差达到最大,为0.39%。
这与有限元仿真分析得到的0.33%的结果接近。
最后,利用显微视觉测量方法对平台X和Y方向的耦合误差进行了实验测试,实验结果表明,耦合误差随着平台运动位移的增大而增大,最大值为1.8%,与理论仿真趋势吻合。
随着科学技术的迅猛发展,对精密机械要求从微米级提高到了纳米级,甚至亚纳米级[1]。
基于柔性铰链结构的二维微动工作台的设计分析
收稿日期:2005 05 13基金项目:国家自然科学基金资助项目(50135040;69774020)作者简介:张建雄(1977 ),男,江苏泰兴人,硕士生,研究方向:智能仪器仪表和控制。
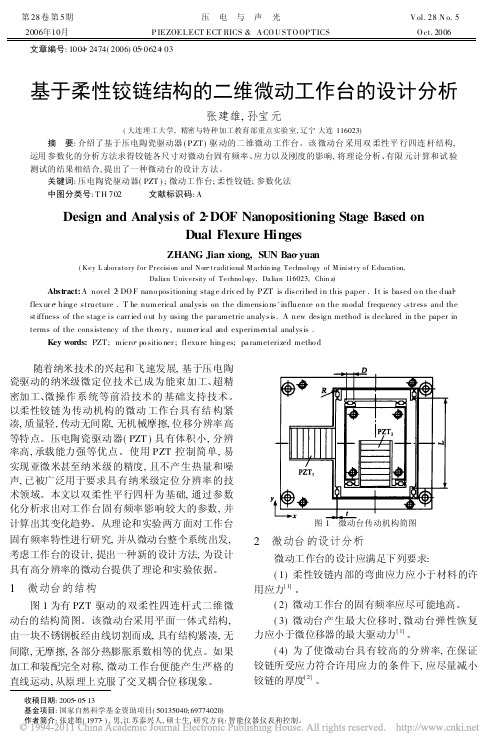
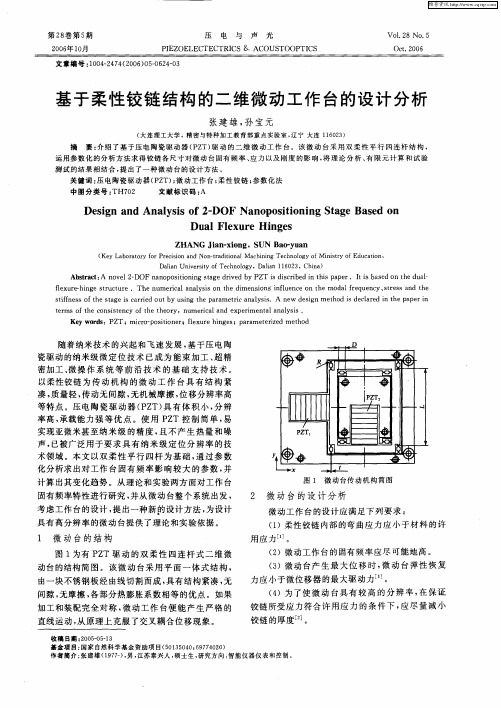
文章编号:1004 2474(2006)05 062403基于柔性铰链结构的二维微动工作台的设计分析张建雄,孙宝元(大连理工大学,精密与特种加工教育部重点实验室,辽宁大连116023)摘 要:介绍了基于压电陶瓷驱动器(P ZT )驱动的二维微动工作台。
该微动台采用双柔性平行四连杆结构,运用参数化的分析方法求得铰链各尺寸对微动台固有频率、应力以及刚度的影响,将理论分析、有限元计算和试验测试的结果相结合,提出了一种微动台的设计方法。
关键词:压电陶瓷驱动器(PZT );微动工作台;柔性铰链;参数化法中图分类号:T H 702 文献标识码:ADesign and Analysis of 2 DOF Nanopositioning Stage Based onDual Flexure HingesZHANG Jian xiong,SUN Bao yuan(Key L aboratory for Precision and Non traditional M achin ing Technology of M inistry of E ducation,Dalian University of Technology,Dalian 116023,Chin a)Abstract:A novel 2 DO F nano positioning stag e driv ed by P ZT is discribed in this paper .I t is based o n the dualflex ur e hing e structure .T he numerical analysis on the dimensio ns'influence o n the modal frequency 、str ess and the st iffness of the stag e is carr ied o ut by using the par ametric analy sis.A new desig n method is declared in the paper in terms of the consistency of the theo ry ,numer ical and experimental analysis .Key words:PZT ;micro po sitio ner ;flexure hing es;pa rameterized metho d随着纳米技术的兴起和飞速发展,基于压电陶瓷驱动的纳米级微定位技术已成为能束加工、超精密加工、微操作系统等前沿技术的基础支持技术。
基于柔性铰链结构的二维微动工作台的设计分析
sif e so h t g a re u y u i g t ep r me rca a y i.A e d sg e h d i d ca e n t ep p ri tf s ft e s a e i c r id o t sn h a a t i n l ss n s b n w e i nm t o s e l r d i h a e n
图 1 微 动 台传 动 机 构 简 图
2 微 动 台的 设 计 分 析
微动 工作 台的设计 应满 足下 列要 求 : ( )柔性 铰链 内部 的弯 曲应 力应 小 于 材料 的许 1
基 于 柔性 铰 链 结构 的 二 维微 动 工 作 台的设 计 分 ቤተ መጻሕፍቲ ባይዱ
张建 雄 , 宝元 孙
( 大连理工大学 ,精密与特种加 工教育部重点实验室 , 宁 大连 1 62 ) 辽 1 03
摘
要 : 绍 了 基 于 压 电 陶 瓷 驱 动 器 ( Z 驱 动 的 二 维 微 动 工作 台 。该 微 动 台 采 用 双 柔 性 平 行 四连 杆 结 构 , 介 P T)
运用 参 数 化 的分 析 方 法 求 得 铰 链 各 尺 寸 对 微 动 台 固有 频 率 、 力 以及 刚度 的 影 响 , 理 论 分 析 、 限 元 计 算 和 试 验 应 将 有 测 试 的结 果 相 结 合 , 出 了一 种微 动 台 的 设 计 方 法 。 提 关 键 词 : 电 陶 瓷驱 动 器 ( Z ) 微 动 工 作 台 ; 性 铰 链 ; 数 化法 压 PT; 柔 参
Ab ta t A o e - sr c : n v l DOF n n p st n n tg rv d b T i d s r e h sp p r. t sb s d o h u l 2 a o o i o i gs a ed i e y PZ s i e i d i t i a e I a e n t ed a- i b n i
柔性铰链微动机构的分析与设计
图 7-2 双柔性四杆机构工作台结构简图
四.
柔性铰链的基本工作原理与设计
柔性铰链是实现小范围偏转产生微位移的结构,它具有高精度、高稳定性、 无间隙和无机械摩擦等特点,并在近十几年来广泛用于微定位系统中。柔性铰链 是一种圆弧切口结构,由柔性铰链这种弹性导轨可组成新型的微定位系统,利用 其受力弯曲产生的有限角位移,可以达到精密定位的目的;柔性铰链可以设计成 多种形式进行饶轴的复杂角运动或构成柔性系统形成直线运动。 柔性铰链的基本 图形如图 7-3 所示。
杆长 L 可根据结构自行选定,根据公式可求出每个铰链的转角刚度 Kθ ,再根据 确定的转角刚度,确定柔性铰链的基本参数、宽度 t、厚度 b 和圆弧半径 R。
图 7-5 柔性铰链微动工作台模型
五.
柔性铰链微动工作台的分析与设计公式
对图 7-5 所示的微动工作台基本结构设计时进行下列假设: 1. 工作台运动时,仅在柔性铰链处产生弹性变形,其他部分可认为是刚体; 2. 柔性铰链只产生转角变形,无伸缩及其它变形。 设四个柔性铰链的转角刚度为 Kθ ,那么当四连杆机构在外力 F 的作用下产 生 S 的平移,每个柔性铰链所储存的弹性能为 1 Aθ = K θθ 2 2 S 式中 θ = l
(7-12)
Kθ 可由表一查出外力 F 所作的功为
A =
1 FS 2
(7-13)
由能量守恒定律: A=4 A θ ,可推导出弹性微动工作台的刚度值—基本设计计 算公式:
K = 4
Kθ l2
(7-14)
设计方法: 一、 可根据微驱动器的参数确定工作台刚度 二、 选定 l,查表定 R,t,b.
八、光机电一体化柔性系统结构分析
Fx 作用下产生的沿 X 轴位移 Δx 为:
柔性铰链的微动平台设计

p o s i t i o n c o n t r o l c a d b e r e l a i z e d珊 w e l l B se a d o n t h e d e s i n g o ft bl a e . t h e d y n a m i c mo d e l fm o cr a o — mi c r o t a b l e re a b u i l t nd a
d r i v i n g p r e c i s i o n p o s i t i o n i n g me c h a n s i m。 m i c r o t bl a e i s d e s i g n e d b se a d o n le f x u r e h i n g e . w h i c h c 帆 a ch i e v e l rg a e s t r o k e a n d
g r t a i n g a n d h i g h - p r e c i s i o n i n c r e m e n t a l ra g t i n g r a e a d o p t e d t o s o l v e t h e p r o b l e m fl o a r g e s t r o k e a n d h i g h r e s o l u t i o n . C l o s e — l o o p
n no a me t e r po s i t i o n i n g .Mi c r o - t a b l e mo u n t e d o n t h e ma cr o - t bl a e s i d r i v e n b y pi e z o e l e c t r i c ct a u a t o r . Hi g h- p r e c i s i o n bs a o l u t e
柔性铰链微动平台设计
柔性铰链微动平台设计概述柔性铰链微动平台是一种具有高灵活性和精确控制能力的微型机械系统,在多个领域中发挥着重要作用。
本文将介绍柔性铰链微动平台设计的综述,包括其工作原理、设计要求、设计流程和应用案例等。
工作原理柔性铰链微动平台是基于柔性铰链机构设计的微型机械平台。
柔性铰链机构由一系列具有可弯曲性能的连接件组成,通过这些连接件的柔性变形,实现平台的微动控制。
具体来说,柔性铰链微动平台的工作原理如下:1.柔性铰链机构的变形: 通过施加力或扭矩,柔性铰链机构的连接件发生变形,从而改变平台的位置和姿态。
这种柔性变形具有较大的位移范围和高精度的响应能力。
2.控制系统的反馈: 在柔性铰链微动平台上安装传感器,监测平台的位置和姿态。
这些传感器将实时反馈到控制系统中,以便根据需求调整施加在柔性铰链机构上的力或扭矩。
3.控制策略的实施: 根据控制系统的反馈信息和预设的控制策略,控制系统通过执行合适的控制算法,实现对柔性铰链机构的控制。
这样,就实现了平台的精确位移和姿态控制。
设计要求设计柔性铰链微动平台时,应满足以下要求:1.柔性性能: 连接件应具有足够的柔性,能够实现平台的精确位移和姿态控制。
同时,连接件的变形应具有稳定的特性,以保证平台的可靠性和重复性。
2.结构刚度: 平台的柔性铰链机构需具备一定的结构刚度,以保证在外力作用下的稳定性和抗扭性能。
同时,在高精度控制要求下,结构刚度也可减小位移误差。
3.传感器选择: 选择合适的传感器用于监测平台的位置和姿态。
传感器应具有高精度、高灵敏度和快速反应的特点,以确保系统控制的准确性和稳定性。
4.控制系统设计: 设计合适的控制系统,能够接收传感器反馈信息,并根据预设的控制策略实现对柔性铰链机构的控制。
控制系统应具有高精度、高稳定性和高响应性能。
5.应用场景适应: 根据具体的应用需求,设计柔性铰链微动平台时应考虑适应不同环境和工况的要求,例如温度、湿度和尺寸约束等。
设计流程设计柔性铰链微动平台的流程一般包括以下几个步骤:1. 确定需求和应用场景在设计柔性铰链微动平台之前,首先需要明确需求和应用场景。
柔性铰链微动工作台测量与控制系统设计与实现 毕业设计
摘要柔性铰链以其无摩擦、无间隙、运动灵活、敏度高的优点,在各个领域得到广泛应用,尤其在纳米技术领域中有着广泛的应用前景,柔性铰链是实现纳米级微运动的关键技术,其运动位移的测量与控制是实现纳米运动的核心技术。
因而在本次毕业设计中采用柔性铰链机构,电容式传感器以及压电陶瓷驱动相结合,设计了一套微动工作台的测量与控制系统。
用我们所学知识,使之成为一套精密测量与控制系统,实现高效率,高精度,高稳定性,低误差的测量与控制系统。
在本次毕业设计中通过解析法从理论上分析了柔性铰链微动工作台的工作原理,描述了电容式传感测微原理,并设计了电容信号处理电路、PID运算电路、功率放大电路,以及相应的单片机接口电路与软件。
在该测量与控制系统中,由柔性铰链构成的平行四杆机构产生一个微位移量δ,由于被测位移量为纳米级,从而采用电容式传感器进行测量,再将测量通过电容信号处理电路进行处理。
然后以单片机为核心通过软件编程对信号进行采样、分析、运算,并用4位数码显示管对测量值进行显示,再用键盘输入预定值。
为了更好地减小误差,提高系统的控制精度,运用PID运算电路结合压电陶瓷驱动来实现对该工作台的纳米级控制。
,分辨率1nm。
最终使该柔性铰链微动工作台实现运动范围10m关键词:柔性铰链;电容式传感器;传感器处理电路;MCS-51单片机;;压电陶瓷AbstractFlexible hinge with its no friction, no clearance, sports flexible, the advantage of high sensitivity, widely used in various fields, especially in the field of nanometer technology has a wide application prospect, flexible hinge nanoscale micro motion is to realize the key technology, their sports displacement measurement and control is to realize the core technology of the nanometer movement. Thus in the graduation design using the flexible hinge institutions, capacitive sensor and piezoelectric driven unifies, designed a set of budge the measurement and control system worktable. With our knowledge learnt, make it become a set of precision measurement and control system, realize high efficiency, high precision, high stability, low error of measurement and control. In the graduation design through analytical method of flexible hinge theoretically analyses the working principle of workbench budge, describes the capacitive sensing micro-distance measuring principle, and designed a capacitor and corresponding signal processing circuit, the SCM processing circuit and software. In the measurement and control system, composed of by flexible hinge parallel four-bar produce a micro displacement of the delta, for being measured displacement, thus using nanoscale capacitive sensor measuring, again will measure through the capacitance signal processing circuit for processing. Then based on singlechip through software programming to signal sampling, analysis, operation, and four XianShiGuan on measuring data for digital display, reoccupy keyboard input predetermined value. In order to reduce errors, and improve the system control precision, using PID operation integrated circuit piezoelectric ceramic drive to achieve the workbench of precise control. Eventually make the flexible hinge budge workbench realize 1nm moving range 10, resolution 1nm.Keywords: Flexible hinge;capacitive sensor;sensor processing circuit;MCS - 51 SCM;piezoelectric ceramics目录摘要Abstract第1章绪论 (1)1.1柔性铰链国内外现状和发展趋势 (1)1.1.1柔性铰链的类型 (1)1.1.2柔性铰链国内外现状 (2)1.1.3柔性铰链研究趋势 (4)1.2柔性铰链研究意义 (4)1.3毕业设计任务 (4)第2章柔性铰链微动工作台测量与控制系统总体设计 (5)2.1总体方案设计 (5)2.2柔性铰链单元工作原理 (6)2.3平行四杆微动工作台设计 (7)第3章柔性铰链微动工作台测量系统设计 (9)3.1电容式传感器基本工作原理 (9)3.1.1变面积型 (9)3.1.2变介电常数型 (10)3.1.3变极距型 (11)3.2电容式传感器转换电路 (13)3.2.1转换电桥 (13)3.2.2相敏检波电路 (14)3.3 A/D转换电路 (15)3.4 MCS-51单片机 (17)第4章柔性铰链微动工作台控制系统设计 (20)4.1 D/A转换器 (20)4.3 PID控制器 (21)4.3.1 PID运算电路 (21)4.3.2 PID控制器参数整定 (23)4.4功率放大器 (24)4.5压电陶瓷驱动器 (25)第5章总结与展望 (27)5.1总结 (27)5.2展望 (27)参考文献 (29)致谢 (31)附录一测量与控制总体电路图 (32)附录二软件设计 (39)第1章绪论六十年代前后,由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且还对其尺寸和体积提出了微型化的要求,人们在经过对各种类型的弹性支承的试验探索后,才逐步开发出体积很小,可做到无机械摩擦、无间隙的柔性铰链[1],柔性铰链立即被广泛地用于陀螺仪加速度计、精密天平等仪器仪表中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文文献综述
机械设计制造及其自动化
圆弧形柔性铰链式二维并联压电微动平台的设计
1、前言
以柔性铰链为导向机构的超高精度微动工作台已被广泛用于能束加工、超精密检测、微操作系统等要求具有纳米级定位分辨率的技术领域中。
随着纳米技术研究的深入发展, 高分辨率、宽行程、高频响的微动工作台越来越成为研究开发的热点和难点。
随着科技的发展, 各类精密、超精密仪器仪表, 如图形发生器、分步重复照相机、光刻机、电子束和X射线及其检测设备等被广泛地应用于科学研究和现实生活中[3~5]。
与此同时, 相配套的各类精密、超精密微动平台也应运而生。
微动系统一般由微动平台、检测装置、控制系统3 部分组成。
2、微动平台简介
微动平台,或称为微位移机构,是指行程小(一般小于mm 级)、灵敏度和精度高的机构, 它是微动系统的核心。
微动工作台主要由微位移驱动器、导轨和输出平台等组成。
微位移驱动器直接把输入电压/电流转变成相应的输出位移, 而导轨则把此位移量传递到工作台。
3、压电陶瓷简介
由于压电陶瓷驱动器具有高刚度、高分辨率、无摩擦和磨损以及响应速度快等优点, 因而在纳米级的微定位装置中得到广泛应用。
系统采用压电陶瓷微位移驱动器, 它是一种固体器件, 易与电源、位移传感器、微机等实现闭环控制, 无需传动机构, 具有位移精度高, 响应速度快, 功耗低等特点, 被广泛应用于微动平台的设计中。
压电效应的概念最先来源于压电晶体,当此类电介质晶体外加机械载荷时,晶体内部的正负电荷中心发生相对位移而产生极化,导致晶体两端出现符号相反的束缚电荷。
反之,如将具有压电效应的电介质晶体置于电场中,由于电场的作用而引起电介质晶体内部正负电荷中心产生相对位移,致使压电晶体发生形变,晶体的这种现象称为逆压电效应。
在工程技术中应用较普遍的是由压电陶瓷材料制作而成的压电元件。
通常选用压电常数较大的层叠式压电元件获取微变形,它的线性比较优良,且具有体积小、刚度大、形变相对较大、位移分辨率高和响应迅速的特点。
4、国内外研究现状
柔性铰链是一种弹性元件, 具有结构简单、重量轻、无摩擦、无噪声、不需要润滑等特点。
在结构设计上, 把它作为导向、定位和传动等元件。
笔者设计的柔性铰链扩展、配置灵活, 通过对一维柔性铰链的简单几何叠加, 可以方便组成二维或多维柔性铰链。
柔性铰链分为单轴柔性铰链和双轴柔性铰链两大类。
在微位移机构中广泛用于制作微动工作台的柔性导轨、支承等。
用柔性铰链制作的微位移机构,具有很高的位移分辩1 nm、定位精度±0. 05μm和重复精度,工作稳定、无机械摩擦、无间隙、无爬行和体积小等特点;柔性铰链支承微动机构是近年来发展起来的一种新型的微位移机构,是一种很有应用前景的微位移器件。
系统采用柔性铰链为导轨形式, 传递微位移驱动器输出的位移, 它具有体积小、无机械摩擦、导向精度高、加工精度易于保证、不需要装配等特点。
陈时锦, 杨元华, 孙西芝, 程凯[1] 研究了针对于一种常用的以双柔性平行四连杆机构作导向的二维微位移工作台, 分析并推导出了工作台结构参数对各性能的影响公式, 并用有限元分析的方法验证了这些公式的正确性。
之后建立了约束优化问题的数学模型, 以具体实例介绍了用有限元分析的方法进行优化求解, 得出最优设计参数的过程。
黄金永, 魏燕定, 张炜[3] 研究了空间微动平台的柔性铰链参数优化设计。
结合空间微动平台的特点: 轻量化、小尺寸、尽可能高的一阶共振频率, 以及满足平台工作行程、驱动器推力大小、和材料许用应力等要求, 通过对柔性铰链公式的详细分析, 给出了这类微动平台的设计流程和实例演示, 同时也有助于我们理解柔性铰链各参数间的作用和相互关系。
张建雄, 孙宝元[5] 研究了基于柔性铰链结构的二维微动工作台,介绍了基于压电陶瓷驱动器( PZT) 驱动的二维微动工作台。
该微动台采用双柔性平行四连杆结构,运用参数化的分析方法求得铰链各尺寸对微动台固有频率、应力以及刚度的影响, 将理论分析、有限元计算和试验测试的结果相结合, 提出了一种微动台的设计方法。
田延岭,张大卫,闫兵[6] 研究了二自由度微定位平台,研制了一台压电陶瓷驱动和弹性铰链导向的一体化微定位平台, 该微定位平台具有高刚度、高响应速度和高分辨率等优点。
为了克服压电陶瓷驱动器伸长量较小的不足, 采用杠杆放大机构增加微定位平台的位移输出。
考虑驱动电路的影响, 建立了微定位平台的机电耦合模型。
通过试验研究了微定位平台的静动态特性, 试验结果表明微定位平台的分辨率为5 nm, 固有频率分别为143 H z 和180 H z。
该微定位平台可应用于纳米级的微定位。
高鹏,袁哲俊,姚英学[8] 研究了基于柔性铰链结构的新型双向微动工作台。
图1为所研制工作台的结构示意图, 各连接处都为柔性铰链结构。
该工作台内外层都是四支点支承的对称结构, 内层(x向) 工作台刚性嵌套在外层(y向) 工作台内, 分别采用二个压
电陶瓷驱动, 实现二维运动。
该工作台有两级放大机构。
由于采用二级杠杆放大结构, 所以该双向微动工作台满足各类宽范围扫描高精度定位场合的要求。
图1 工作台结构示意图
微位移技术是精密机械和仪器实现高精度的关键技术之一。
微位移技术由微位移机构、检测装置和控制系统三部分组成,它的行程小、灵敏度和精度高,主要用于提高运动的灵敏度和精度。
近年来得到迅速发展, 成为现代机械工业的基础。
目前,主要应用在精度补偿、微进给及精密调整三方面。
参考文献
[1]陈时锦, 杨元华, 孙西芝, 程凯. 基于柔性铰链的微位移工作台性能分析与优化设计[J]. 机械设
计, 2004, 21(7): 46-49
[2]关耀奇, 陈蓉玲. 柔性铰链在精密和超精密加工中的应用与研究[J]. 机械设计, 2003, 20(3):
46-47
[3]黄金永, 魏燕定, 张炜. 空间微动平台的柔性铰链参数优化设计[J]. 机电工程, 2006, 23(1):
55-57
[4]纪海慧, 钱进. 基于柔性铰链的精密定位平台的设计[J]. 机床与液压, 2007, 35(11): 62-64
[5]张建雄, 孙宝元. 基于柔性铰链结构的二维微动工作台的设计分析[J]. 压电与声光, 2006,
28(5): 624-626
[6]田延岭, 张大卫, 闫兵. 二自由度微定位平台的研制[J]. 光学精密工程, 2006, 14(1): 94-99
[7]刘品宽, 孙立宁, 曲东升, 荣伟彬. 新型二维纳米级微动工作台的动力学分析[J]. 光学精密工程,
2002, 10(2): 143-147
[8]高鹏, 袁哲俊, 姚英学. 基于柔性铰链结构的新型双向微动工作台的研究[J]. 仪器仪表学报,
1998, 19(2): 192-193
[9]Kee-Bong Choi, Jae Jong Lee, Seiichi Hata. A piezo-driven compliant stage with double mechanical amplification mechanisms
arranged in parallel[J]. Physical, 2010:173-183
[10]Chi-Ying Lin, Po-Ying Chen. Precision tracking control of a biaxial piezo stage using repetitive control and
double-feedforward compensation[J]. Mechatronics, 2010:24-32
[11]Hua Wang, Xianmin Zhang. Input coupling analysis and optimal design of a 3-DOF compliant micro-positioning stage[J].
Mechanism and Machine Theory, 2008:400-410
[12]S.B. Choi, S.S. Han, Y.M. Han, B.S. Thompson. A magnification device for precision mechanisms featuring piezoactuators and
flexure hinges: Design and experimental validation[J], Mechanism and Machine Theory, 2007:1184-1198。