系统建模与仿真仿真作业结果
基于witness的系统建模与仿真实验报告
多路径生产仿真模型S11085240007 物流工程一、实验名称:多路径生产仿真模型二、实验目的1)了解结合路径path的系统设计。
2)熟悉系统元素Part、Machine、Buffer、Variable、Labor、Attribute的用法。
3)深入研究系统元素Machine的用法。
4)研究机器、缓冲区结合路径以及劳动者之间协作所形成系统的运行效率。
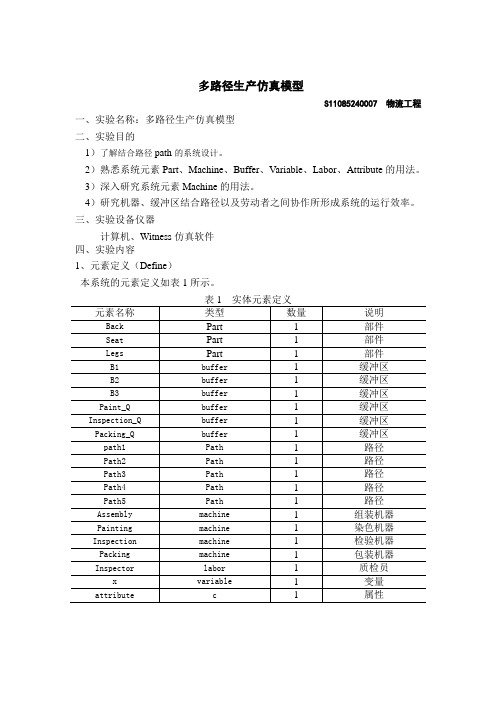
三、实验设备仪器计算机、Witness仿真软件四、实验内容1、元素定义(Define)本系统的元素定义如表1所示。
表1 实体元素定义元素名称类型数量说明Back Part 1 部件Seat Part 1 部件Legs Part 1 部件B1buffer 1 缓冲区B2buffer 1 缓冲区B3buffer 1 缓冲区Paint_Q buffer 1 缓冲区Inspection_Q buffer 1 缓冲区Packing_Q buffer 1 缓冲区path1Path 1 路径Path2Path 1 路径Path3Path 1 路径Path4Path 1 路径Path5Path 1 路径Assembly machine 1 组装机器Painting machine 1 染色机器Inspection machine 1 检验机器Packing machine 1 包装机器Inspector labor 1 质检员x variable 1 变量attribute c 1 属性2、元素可视化(Display)设置各个实体元素的显示特征定义设置如下图所示3、元素细节(Detail)设计1对Part各元素细节设计●可视化效果设定●属性定义:seat.Arrival Type=Activeseat.inter Arrival=2.0back.Arrival Type=Activeback.inter Arrival=2.0legs.Arrival Type=Activelegs.inter Arrival=2.0●规则定义:seat’s output Rules:PUSH to B1back’s output Rules:PUSH to B2legs’ output Rules:PUSH to B32对Buffer各元素细节设计display 选项中对话框对buffer icon 、name、part queue属性进行设置;3对Machine各元素的细节设计属性定义:Assembly.Type=AssemblyAssembly.Cycle Time=6.0Assembly. Input Quantity=3;!机器Assembly的输入零部件数量为3个;规则定义:Assembly.Input Rules(From):MATCH/ANY B1 #(1)B2 #(1)B3 #(1) !匹配缓冲区B1、B2、B3中的任意类型的part各一个;Assembly.Output Rules(To):PUSH to Paint_Q Using Path !通过路径将成品送至缓冲区Paint_Q;活动定义:Assembly.actions on finish:3.1)对machine元素Assembly的详细定义:属性定义:♦Assembly.Type=Assembly♦Assembly.Cycle Time=6.0♦Assembly. Input Quantity=3;!机器Assembly的输入零部件数量为3个;规则定义:Assembly.Input Rules(From):♦MATCH/ANY B1 #(1)B2 #(1)B3 #(1) !匹配缓冲区B1、B2、B3中的任意类型的part各一个;Assembly.Output Rules(To):♦PUSH to Paint_Q Using Path !通过路径将成品送至缓冲区Paint_Q;活动定义:Assembly.actions on finish:♦ICON = 115!通过变换图标,表示seat、back、legs组装成了一把白色椅子;3.2)对machine元素inspection的详细定义:属性定义:♦inspection.Type=Single♦inspection.Cycle Time=3.0♦bor=Inspector规则定义:inspection.Input Rules(From):♦PULL from Inspection_Q !从缓冲区Inspection_Q中提取零件加工;inspection.Output Rules(To):♦PERCENT /189 Packing_Q Using Path 90.00 ,Paint_Q With Inspector Using Path 10.00 !产生随机概率,以90%的概率通过检测,使用路径移向Packing_Q,进行打包;以10%的概率检测出油漆有质量问题,需要人工搬运,通过路径送回缓冲区Paint_Q,排队重新油漆。
MATLAB Simulink系统建模与仿真 实验报告
MATLAB/Simulink 电力系统建模与仿真实验报告姓名:******专业:电气工程及其自动化班级:*******************学号:*******************实验一无穷大功率电源供电系统三相短路仿真1.1 无穷大功率电源供电系统仿真模型构建运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块:(1)无穷大功率电源模块(Three-phase source)(2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load)(3)三相串联RLC支路模块(Three-Phase Series RLC Branch)(4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings))(5)三相电压电流测量模块(Three-Phase V-I Measurement)(6)三相故障设置模块(Three-Phase Fault)(7)示波器模块(Scope)(8)电力系统图形用户界面(Powergui)按电路原理图连接线路得到仿真图如下:1.2 无穷大功率电源供电系统仿真参数设置1.2.1 电源模块设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:1.2.2 变压器模块变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图:1.2.3 输电线路模块根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图:1.2.4 三相电压电流测量模块此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:1.2.5 故障设置模块勾选故障相A、B、C,设置短路电阻0.00001Ω,设置0.02s—0.2s发生短路故障,参数设置如下图:1.2.6 示波器模块为了得到仿真结果准确数值,可将示波器模块的“Data History”栏设置为下图所示:1.3 无穷大功率电源供电系统仿真结果及分析得到以上的电力系统参数后,可以首先计算出在变压器低压母线发生三相短路故障时短路电流周期分量幅值和冲击电流的大小,短路电流周期分量的幅值为Im=10.63kA,时间常数Ta=0.0211s,则短路冲击电流为Iim=17.3kA。
控制工程实训课程学习总结基于MATLAB的系统建模与仿真实验报告
控制工程实训课程学习总结基于MATLAB 的系统建模与仿真实验报告摘要:本报告以控制工程实训课程学习为背景,基于MATLAB软件进行系统建模与仿真实验。
通过对实验过程的总结,详细阐述了系统建模与仿真的步骤及关键技巧,并结合实际案例进行了实验验证。
本次实训课程的学习使我深入理解了控制工程的基础理论,并掌握了利用MATLAB进行系统建模与仿真的方法。
1. 引言控制工程是一门应用广泛的学科,具有重要的理论和实践意义。
在控制工程实训课程中,学生通过实验来加深对控制系统的理解,并运用所学知识进行系统建模与仿真。
本次实训课程主要基于MATLAB软件进行,本文将对实验过程进行总结与报告。
2. 系统建模与仿真步骤2.1 确定系统模型在进行系统建模与仿真实验之前,首先需要确定系统的数学模型。
根据实际问题,可以选择线性或非线性模型,并利用控制理论进行建模。
在这个步骤中,需要深入理解系统的特性与工作原理,并将其用数学方程表示出来。
2.2 参数识别与估计参数识别与估计是系统建模的关键,它的准确性直接影响到后续仿真结果的可靠性。
通过实际实验数据,利用系统辨识方法对系统的未知参数进行估计。
在MATLAB中,可以使用系统辨识工具包来进行参数辨识。
2.3 选择仿真方法系统建模与仿真中,需要选择合适的仿真方法。
在部分情况下,可以使用传统的数值积分方法进行仿真;而在其他复杂的系统中,可以采用基于物理原理的仿真方法,如基于有限元法或多体动力学仿真等。
2.4 仿真结果分析仿真结果的分析能够直观地反映系统的动态响应特性。
在仿真过程中,需对系统的稳态误差、动态响应、鲁棒性等进行综合分析与评价。
通过与理论期望值的比较,可以对系统的性能进行评估,并进行进一步的优化设计。
3. 实验案例及仿真验证以PID控制器为例,说明系统建模与仿真的步骤。
首先,根据PID控制器的原理以及被控对象的特性,建立数学模型。
然后,通过实际实验数据对PID参数进行辨识和估计。
建模与仿真实验报告
建模与仿真实验报告建模与仿真实验报告引言建模与仿真是一种常用的方法,用于研究和分析复杂系统的行为。
通过建立数学模型并进行仿真实验,我们可以更好地理解系统的运行机制,预测其未来的发展趋势,并为决策提供依据。
本实验报告将介绍我所进行的建模与仿真实验,以及所得到的结果和结论。
1. 实验目标本次实验的目标是研究一个电动汽车的充电过程,并通过建模与仿真来模拟和分析其充电时间和电池寿命。
2. 实验步骤2.1 建立数学模型首先,我们需要建立一个数学模型来描述电动汽车充电过程。
根据电动汽车的充电特性和电池的充电曲线,我们选择了一个二阶指数函数来表示充电速度和电池容量之间的关系。
通过对历史充电数据的分析,我们确定了模型的参数,并进行了合理的调整和验证。
2.2 仿真实验基于建立的数学模型,我们使用MATLAB软件进行了仿真实验。
通过输入不同的充电时间和初始电池容量,我们可以获得充电过程中电池容量的变化情况,并进一步分析充电时间与电池寿命之间的关系。
3. 实验结果通过多次仿真实验,我们得到了一系列充电时间和电池寿命的数据。
根据这些数据,我们可以绘制出充电时间与电池寿命的关系曲线。
实验结果表明,充电时间与电池寿命呈现出一种非线性的关系,即充电时间的增加并不总是能够延长电池的使用寿命。
4. 结果分析通过对实验结果的分析,我们可以得出以下结论:4.1 充电时间的增加并不总是能够延长电池的使用寿命。
虽然在一定范围内增加充电时间可以提高电池的容量,但过长的充电时间会导致电池内部产生过多的热量,从而缩短电池的寿命。
4.2 充电速度对电池寿命的影响较大。
较快的充电速度会增加电池的热量产生,从而缩短电池的寿命;而较慢的充电速度则可以减少电池的热量产生,延长电池的寿命。
4.3 充电时间和电池寿命之间的关系受到电池类型和充电方式等因素的影响。
不同类型的电池在充电过程中表现出不同的特性,因此在实际应用中需要根据具体情况进行充电策略的选择。
系统建模与仿真实验报告
系统建模与仿真实验报告系统建模与仿真实验报告1. 引言系统建模与仿真是一种重要的工程方法,可以帮助工程师们更好地理解和预测系统的行为。
本实验旨在通过系统建模与仿真的方法,对某个实际系统进行分析和优化。
2. 实验背景本实验选择了一个电梯系统作为研究对象。
电梯系统是现代建筑中必不可少的设备,其运行效率和安全性对于整个建筑物的使用体验至关重要。
通过系统建模与仿真,我们可以探索电梯系统的运行规律,并提出优化方案。
3. 系统建模为了对电梯系统进行建模,我们首先需要确定系统的各个组成部分及其相互关系。
电梯系统通常由电梯、楼层按钮、控制器等组成。
我们可以将电梯系统抽象为一个状态机模型,其中电梯的状态包括运行、停止、开门、关门等,楼层按钮的状态则表示是否有人按下。
4. 仿真实验在建立了电梯系统的模型之后,我们可以通过仿真实验来模拟系统的运行过程。
通过设定不同的参数和初始条件,我们可以观察到系统在不同情况下的行为。
例如,我们可以模拟电梯在高峰期和低峰期的运行情况,并比较它们的效率差异。
5. 仿真结果分析通过对仿真实验结果的分析,我们可以得出一些有价值的结论。
例如,我们可以观察到电梯在高峰期的运行效率较低,这可能是由于大量乘客同时使用电梯导致的。
为了提高电梯系统的运行效率,我们可以考虑增加电梯的数量或者改变乘客的行为规则。
6. 优化方案基于对仿真结果的分析,我们可以提出一些优化方案来改进电梯系统的性能。
例如,我们可以建议在高峰期增加电梯的数量,以减少乘客等待时间。
另外,我们还可以建议在电梯内设置更多的信息显示,以便乘客更好地了解电梯的运行状态。
7. 结论通过本次实验,我们深入了解了系统建模与仿真的方法,并应用于电梯系统的分析和优化。
系统建模与仿真是一种非常有用的工程方法,可以帮助我们更好地理解和改进各种复杂系统。
在未来的工作中,我们可以进一步研究和优化电梯系统,并将系统建模与仿真应用于更多的实际问题中。
8. 致谢在本次实验中,我们受益于老师和同学们的帮助与支持,在此表示诚挚的感谢。
系统建模与仿真上机报告
系统建模与仿真实验报告实验题目:库存系统建模与仿真设计指导老师:学生:时间:系统建模与仿真实验报告一、实验目的:本次实验是在学习完离散事件系统建模与仿真的课堂理论后的实际操作试验,可以很好的运用和巩固学过的知识,同时也是对学习的检验。
希望在试验中了解仿真中相关的随机统计模型;能够运用Witness对运营系统分析、建模、仿真运行、结果分析及提出评价和改善建议。
二、试验环境:本次试验是在充分分析所给出的题目后,对题目的要求建立仿真模型,主要运用witness仿真软件运行所建立的模型并分析所得的结果,然后在修改调整的基础上得到最优化的结果。
三、题目:库存系统建模与仿真设计课题系统描述:顾客进入订货服务台的到达间隔时间服从均值为10分钟的负指数分布,首次到达时刻点为0。
一个工作人员接受并检查顾客的订单、收取费用,总共花费时间为UNIFORM (8, 10)分钟。
完成这个步骤后,订单被随机送给两个仓库人员之一(每个仓库人员都有50%的概率得到一个顾客的订单),仓库人员帮顾客找到订购的货物,花费的时间为UNIFORM (16, 20)分钟。
每个仓库人员只为持有分配给他的订单的顾客提供服务。
顾客拿到货物之后离开系统。
对此系统建立仿真模型,并运行5 000分钟,观察顾客的平均系统逗留时间和最大系统逗留时间等。
一位聪明、年轻的工程师建议,不要为仓库人员指派其服务的顾客,而是让两位仓库人员按照“先到先服务”的原则直接为任意一位前来的顾客服务。
对此系统建立仿真模型,也运行5000分钟,将结果与前面的进行比较。
四、建模与仿真步骤如下:1.元素定义:分别对顾客、工作人员、仓库人员的类型、数量定义,完成仿真模型如下图:2.元素可视化的设置:2.1对顾客进行设置如下图:(顾客进入订货服务台的到达间隔时间服从均值为10分钟的负指数分布)2.2对工作人员进行设置如下图:2.2.1对50%的概率设置:2.2.2仓库工作人员花费时间分布设置:(仓库人员帮顾客找到订购的货物,花费的时间为UNIFORM (16, 20)分钟)2.2.3对仓库人员进行设置如下图:对仓库人员1设置:2.2.4对仓库人员2设置:3.运行结果如下图:五、运行结果分析:通过对以上的运行结果观察可以发现,检查人员的使用效率是49.32%,仓库取货员1的使用效率是45.96%,仓库取货员2 的使用效率是52.20%,可以发现在这种随即分配顾客的模式下,造成顾客有很多的等待和人员效率的分配不合理,就是在随机分配下,可能会由于某个取货人员在某个时间分得了较多的顾客而又在花费较多的时间寻找货物,此时就会造成后面的顾客排队等候,使交货期明显延长,交货效率低下。
系统建模与仿真报告
系统建模与仿真报告姓名:葛海军学号:0411420841系统建模与仿真作业一. 产生十种随机分布的数:1.(0-1)之间的均匀分布:概率密度函数:⎩⎨⎧≤≤=其他0101)(x x P ; 产生思想:采用乘同余法产生;具体实现方法:n n ux x =+1 (mod m );参数:取正整数,为初始值一般取为正整数;,或一般取b b x a a u 1253203+±;m 一般取计算机的字长,其是控制所产生随机数的精度(即:小数点后的位数); 程序(具体程序见附录)实现中取u=11,m=100000,0x 的取值是随机赋的;参数估计:在matlab 命令窗口键入y=junyun(10240);就可以产生10240个随机数保存在向量y 中,然后再键入zhifangtu (y ,100)(调用直方图来对其进行检验),运行结果如下:然后在计算这10240个数的均值和方差在命令窗口键入z=canshu (y ),运行结果为:z=[0.50038 0.083263]其中0.50038表示所产生的数据的均值,0.083263表示所产生数据的方差,而(0-1)之间的均匀分布的随机数的数学期望为0.5,与上面所求出的0.50038很接近,方差0.083263近似与0,于是这种产生方法已经符合要求。
2.瑞利分布随机数的产生概率密度函数:⎪⎩⎪⎨⎧<≥=-000)(2222x x e x x P xσσ; 产生思想:利用直接抽样法产生;具体实现方法:a .先调用产生(0-1)之间的均匀分布的函数(y=junyun(n))产生一组(0-1)之间均匀分布的随机数保存在向量x 里;b .然后作2ln z y =-;c .另z y σ=,于是向量y 就是要产生的瑞利分布的随机数;参数估计:在matlab 命令窗口键入y=ruili(1,10240);就可以产生10240个随机数保存在向量y 中,然后再键入zhifangtu (y ,100)(调用直方图来对其进行检验),运行结果如下:然后在计算这10240个数的均值和方差在命令窗口键入z=canshu (y ),运行结果为:z=[1.255 0.43138]其中1.255表示所产生的数据的均值,0.43138表示所产生数据的方差,而瑞利分布的数学期望计算式为:1σσ=,代入计算得: 1.253,与上面所求出的随机数的平均值 1.2555相当接近,瑞利分布方差的计算公式为:224σπ-当1σ=时代入计算得0.42920与0.43138相当接近,于是这种产生方法已经符合要求。
(完整)系统建模与仿真习题答案(forstudents)
第一章习题1-1什么是仿真?它所遵循的基本原则是什么?答:仿真是建立在控制理论,相似理论,信息处理技术和计算技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识,统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。
它所遵循的基本原则是相似原理。
1-2在系统分析与设计中仿真法与解析法有何区别?各有什么特点?答:解析法就是运用已掌握的理论知识对控制系统进行理论上的分析,计算。
它是一种纯物理意义上的实验分析方法,在对系统的认识过程中具有普遍意义。
由于受到理论的不完善性以及对事物认识的不全面性等因素的影响,其应用往往有很大局限性.仿真法基于相似原理,是在模型上所进行的系统性能分析与研究的实验方法.1-3数字仿真包括那几个要素?其关系如何?答: 通常情况下,数字仿真实验包括三个基本要素,即实际系统,数学模型与计算机。
由图可见,将实际系统抽象为数学模型,称之为一次模型化,它还涉及到系统辨识技术问题,统称为建模问题;将数学模型转化为可在计算机上运行的仿真模型,称之为二次模型化,这涉及到仿真技术问题,统称为仿真实验.1—4为什么说模拟仿真较数字仿真精度低?其优点如何?.答:由于受到电路元件精度的制约和容易受到外界的干扰,模拟仿真较数字仿真精度低但模拟仿真具有如下优点:(1)描述连续的物理系统的动态过程比较自然和逼真。
(2)仿真速度极快,失真小,结果可信度高。
(3)能快速求解微分方程.模拟计算机运行时各运算器是并行工作的,模拟机的解题速度与原系统的复杂程度无关.(4)可以灵活设置仿真试验的时间标尺,既可以进行实时仿真,也可以进行非实时仿真.(5)易于和实物相连。
1-5什么是CAD技术?控制系统CAD可解决那些问题?答:CAD技术,即计算机辅助设计(Computer Aided Design),是将计算机高速而精确的计算能力,大容量存储和处理数据的能力与设计者的综合分析,逻辑判断以及创造性思维结合起来,用以加快设计进程,缩短设计周期,提高设计质量的技术.控制系统CAD可以解决以频域法为主要内容的经典控制理论和以时域法为主要内容的现代控制理论。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Simulink仿真
根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图。
图3
根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4。
图4
可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的。
速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。
所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。
我们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为。
当然,这是需要时间和经验的。
校正后的动态结构图如图5所示
图5
校正后的输出转速曲线如图6所示
图六
电流环跟随性能仿真实验
如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。
这就需要我们对电流环的跟随性能加以分析。
将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。
电流环模型如图7所示:
图7
通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。
[num,den]=linmod('current_loop')
sys=tf(num,den)
figure(1)
margin(sys)
[mag,phase,w]=bode(sys);
[gm,pm,wcg,wcp]=margin(mag,phase,w)
Figure(2)
Nyquist(sys)
Figure(3)
Step(sys)
我们还可以得到以下的数据:
gm = 4.2925
pm =47.7281
wcg =345.3056
cp =164.6317
剪切频率ωc=164.6317rad/s;相角相对裕度δ=47.7281°;-∏穿越频率ω
g=345.3056rad/s 幅值相对裕度Lh=20lg(4.2925)=12.65dB
图8电流环的bode图
图9电流环的nyquist图
图10电流环的单位阶跃响应
从图8与9种可以看出我们设计的电流环控制器是正确的,电流环是稳定的,根据剪切频率就可以看出电流的响应很快,即跟随性很好。
从图10中可以更直接的看到这一点。
在图20中还可以看出电流环的超调量很小(3.6%)与过渡过程时间很短(0.07s)。
转速环抗扰性能仿真
为了对转速环抗干扰能力进行更为细致的分析,我们将动态图做了如下的调整:
图11
转速环与系统输出对比
图12图13图14分别为ASR的输出与电动机转速动态特性仿真结果,ACR的输出与电动机转速动态特性仿真结果以及电动机电流与电动机转速动态特性仿真结果。
图12 ASR的输出特性
图13 ACR的输出特性
图14 电动机电流特性
(2)仿真结果分析
由图12、13、14可见,系统地工作过程可概括为如下几点:
(1)ASR从起动到稳速运行的过程中经历了两个状态,即饱和限幅输出与线性调节状态;
(2)ACR从起动到稳速运行的过程中制工作在一种状态,即线性调节状态;(3)该系统对于起动特性来说,已达到预期目的;
(4)对于系统性能指标来说,起动过程中电流的超调量为5.3%,转速的超调量为21.3%。
这与理论最佳设计有一定差距,尤其是转速超调量略高一些。
抗扰性能分析
实验中我们选取Start time=0.0,Stop time=5.0,仿真时间从0s到5.0s。
扰动加入的时间均为3.5s。
一般情况下,双闭环调速系统的干扰主要是负载突变与电网电压波动两种。
图15、绘出了该系统电动机转速在突加负载(ΔI=12A)情况下电动机电流Id与输出转速n的关系;图16、17分别绘出了电网电压突减(ΔU=100V)情况下晶闸管触发整流装置输出电压Ud0、电动机两端电压Ud,与输出转速n的关系。
图15 突加负载抗扰特性
图16 电网电压突加的抗扰性能
图17电网电压突减的抗扰性能
通过仿真分析,对于该系统的抗扰性能,我们可有如下几个结论:
(1)系统对负载的大幅度突变具有良好的抗扰能力,在ΔI=12A的情况下系统恢复时间为tf=1.2s。
(2)系统对电网电压的大幅波动也同样具有良好的抗扰能力。
在ΔU=100V的情况下,系统恢复时间为tf=0.15s。
(3)与理想的电动机的起动特性相比较,该系统的起动和恢复时间显得略长一些(轻载状态下接近4s)。
实验总结
本次建模仿真实验,按我的理解是一个多学科交叉的综合性实验,在整个实验过程中,激起了我对电机学,运动控制理论的理论回忆,对于双闭环系统有了更加深刻的了解。
从数学建模开始从原理进行剖析学习,当然本次实验的中心思想还是对于仿真实验的训练,Simulink的仿真练习,对各模块的仿真有了更多的了解。
系统性的进行了仿真练习加深了我对仿真模型的认识与理解。
我们小组在实验初期在寻找突破口的地方发生了歧义,最后在运动控制系统的第二章和第三章中找到了灵感,利用MATLAB上的SIMULINK仿真平台对直流调速系统进行理论设计与调试,使得系统的性能分析过程简单且直观。
通过对系统进行仿真,可以准确地了解到理论设计与实际系统之间的偏差,逐步改进系统结构及参数,得到最优调节器参数,使得系统的调试得到简化,缩短了产品的开发设计周期。
在对于PID控制方面的有了进一步的学习与认识。
在这方面老师的帮助起到了十分重要的作用。
测偏纠偏的过程是本次实验的重点也是难点,每个系统的ASR转速调节器的传递函数都有所不同因此对于这里的测偏纠偏过程就变成的一种经验的积累,在一个围寻找最适合自己系统的传递函数显得尤为重要。
参考文献
[1] 阮毅,伯时.电力拖动自动控制系统:运动控制系统[M].:机械工业,2009:
[2] 恩让,聂诗良.控制系统仿真[M].:中国林业;大学,2006:。