信号与系统chapter 7
《信号与系统》教学大纲
《信号与系统》教学大纲Signals and Systems一、课程教学目标1、任务和地位:《信号与系统》是通信及相关专业的专业基础课,是通信专业的必修课程。
通过本课程的学习,使学生掌握用系统的观点和方法分析求解电子系统的特性,为后续课程(通信理论、网络理论、控制理论、信号处理和信号检测理论等课程)的学习和今后从事专业技术工作打下坚实的基础。
2、知识要求:本课程是信息类各专业本科生继“电路分析基础”课程之后必修的重要主干课程。
该课程主要研究确知信号的特性,线性时不变系统的特性,信号通过线性时不变系统的基本分析方法,以及信号与系统分析方法在某些重要工程领域的应用。
该课程是学习《现代通信原理》、《数字信号处理》等后续课程所必备的基础。
3、能力要求:通过本课程的学习,使学生掌握信号分析与线性系统分析的基本理论及分析方法,能对工程中应用的简单系统建立数学模型,并对数学模型求解。
为适应信息科学与技术的飞速发展,及在相关专业领域的深入学习打下坚实的基础。
同时,通过习题和实验,学生应在分析问题与解决问题的能力及实践技能方面有所提高。
二、教学内容的基本要求和学时分配2、具体要求:第一章信号与系统[目的要求]1.掌握信号、系统的概念,以及它们之间的关系。
2.了解信号的函数表示与图形表示。
3.掌握信号的能量和信号的功率的概念。
4.熟练掌握信号的自变量变换和信号的运算。
5.掌握阶跃信号、冲激信号,及其性质、相互关系。
6.了解系统的性质。
[教学内容]1. 信号、信号的自变量变换。
2. 能量和功率信号的判别方法3. 阶跃信号和冲激信号。
4. 一些典型序列。
5. 连续时间系统和离散时间系统。
6. 系统的性质[重点难点]1. 信号和系统的概念。
2. 能量和功率信号的判别方法3. 信号的自变量变换4. 阶跃信号和冲激信号。
5. 系统的性质。
[教学方法] 课堂讲解[作业] 7道[课时] 6第二章线性时不变系统[目的要求]1. 单位冲激响应的概念。
自动控制原理_胡寿松_第五版_第一章_绪论(简)改ppt
掌握系统的基本分析方法
为设计自动控制系统打下一定的基础 为进一步的学习和研究控制理论创造条件
教学方式:讲授 学时:48 H 考核方式: 笔试70% 平时30%:作业(20%),课堂(10%) 教材: 胡寿松主编,《自动控制原理基础教程》第三版,科学 出版社 参考书: 李友善主编,《自动控制原理》,国防科技出版社 高国燊主编,《自动控制原理》,华南理工大学出版社 文锋主编,《自动控制理论》,中国电力出版社 目标:学到真本事,考个好成绩! 要求:认真听课,不能无故旷课、迟到;独立完成作业,能够提 出问题,讨论问题。 即:严肃认真,生动活泼!
前苏联发射“月球”9号探测器,首次在月面软着 陆成功(1966),三年后(1969),美国“阿波罗”11号 把宇航员N. A. Armstrong 送上月球。
第一台火星探测器Sojourner在火星表面软着陆(1996)。
旅行者Voyager 一号,二号开始走出太阳系, 对茫茫太空进行探索。
控制论是一门多学科性的技术科学。在理论研究中,广 泛的使用了各种数学工具:微积分,概率论,复变函数,泛 函,变分法,拓扑学等,实际上是数学的一个分支。
信号与系统(含 拉氏变换,傅氏 变换、z变换
复变函数
电路理论
模拟电子技术
电机与拖动
自动控制理论
线性代数 微积分(含微分方程)
大学物理(力学、热力学)
我们讨论的自控原理,仅仅是控制论的一个小部分,只讨论 了控制系统分析和设计的最一般的理论。属于经典控制部分。
Chapter 1: 主要介绍自动控制的基本概念,控制系统的常用术语及方框图表示; 主要内容: 1.自动控制、自动控制系统的概念 2.自动控制系统的基本方式 3.自动控制系统的类型 4.自动控制系统的要求和分析设计 chapter 2: 如何建立系统的数学模型(定量分析的基础),着重讨论对传递 函数的分析和基于方框图、梅逊公式的数学模型的简化方法;
信号与系统:系统的特性和分类

重要性
频率响应是信号处理和控 制系统设计中的重要概念, 决定了系统对不同频率信 号的处理能力。
频率响应的特性
线性性
时不变性
频率响应是系统的线性特性,与输入信号 的大小无关,只与输入信号的频率有关。
频率响应不随时间变化,即系统对不同时 刻的输入信号具有相同的频率响应特性。
频域分析法
总结词
将信号转换为频域进行分析
VS
详细描述
频域分析法是将信号从时间域转换到频率 域进行分析的方法。通过傅里叶变换等数 学工具,将信号分解为不同频率的分量, 从而分析系统的频谱特性和频率响应。频 域分析法广泛应用于信号处理、通信和控 制系统等领域。
能量域分析法
总结词
研究系统能量特性的方法
平坦度
带宽
指系统在某一频率范围内频率响应的变化 程度,平坦度越好,系统性能越稳定。
指系统能够处理的最高和最低频率范围, 反映了系统对高频和低频信号的处理能力 。
频率响应的应用
滤波器设计
通过调整滤波器的频率响应,实现对特定频率范 围的信号进行增强或抑制。
音频处理
在音频处理中,通过对声音信号的频率响应进行 调整,可以实现声音的均衡、降噪等效果。
03
CHAPTER
系统的分类
线性时不变系统
线性
系统的输出与输入成正比关系, 满足叠加原理。即如果输入信号 是两个或多个信号的和,那么输 出信号也是相应的和。
时不变
系统的特性不随时间变化,即系 统在不同时刻的响应具有相同的 特性。
非线性系统
非线性:系统的输出与输入不成正比关系,不满足叠加原理。即如果输入信号是两 个或多个信号的和,那么输出信号不一定是相应的和。
信号与系统ppt课件

02
时不变:系统的特性不随时间变 化。
系统的数学模型为非线性微分方 程或差分方程。
03
频域分析方法不适用,需采用其 他方法如几何法、状态空间法等
。
04
时变系统
系统的特性随时间变 化,即系统在不同时 刻的响应具有不同的 特性。
时域分析方法:积分 方程、微分方程等。
系统的数学模型为时 变微分方程或差分方 程。
信号与系统PPT课件
目录
CONTENTS
• 信号与系统概述 • 信号的基本特性 • 系统分析方法 • 系统分类与特性 • 系统应用实例
01
CHAPTER
信号与系统概述
信号的定义与分类
总结词
信号是传输信息的一种媒介,具有时间和幅度的变化特性。
详细描述
信号是表示数据、文字、图像、声音等的电脉冲或电磁波,它可以被传输、处理和记录。根据不同的特性,信号 可以分为模拟信号和数字信号。模拟信号是连续变化的物理量,如声音、光线等;数字信号则是离散的二进制数 据,如计算机中的数据传输。
04
CHAPTER
系统分类与特性
线性时不变系统
线性
系统的响应与输入信号的 线性组合成正比,即输出 =K*输入+常数。
时不变
系统的特性不随时间变化 ,即系统在不同时刻的响 应具有相同的特性。
频域分析方法
傅里叶变换、拉普拉斯变 换等。
非线性时不变系统
01
系统的响应与输入信号的非线性 关系,即输出不等于K*输入+常 数。
系统的定义与分类
总结词
系统是由相互关联的元素组成的整体,具有输入、输出和转 换功能。
详细描述
系统可以是一个物理装置、生物体、组织或抽象的概念,它 能够接收输入、进行转换并产生输出。根据不同的分类标准 ,系统可以分为线性系统和非线性系统、时不变系统和时变 系统等频域分析方法将信号和系统从时间域转换到频率域,通过分析系统的频率响应 来了解系统的性能,如系统的幅频特性和相频特性,这种方法特别适用于分析 周期信号和非周期信号。
信号与系统奥本海姆英文版课后答案chapter
Chapter 1 Answers 1.1 1.2 Con vert ing from polar to Cartesia n coord in ates: con vert ing from Cartesia n to polar coord in ates: jo5 =5e, 1 . 3 耳 J e ■2 2 j(1-j)二e 4 , 2, =3e七 =2e七1.3.旳& oe(b) X 2(t )弋心 4)P『砧k(c)dt 1 j^T e - 421-j2 b 2 _2 一1一「3一 eP :.=0, because E:.:::::,X 2(t )二1 |21 TX 2(t)|dt 斗汁亍..2dt - dt-:: J-oO(d)-/'2TX 2(t)=cos(t). Therefore,P oo =lim — fT存2T L1 "Xl [n]u[n]2P :一=0, becausex 2[n]=e a< ? 8),.Therefore, E - Jx 2(t)| lim1 =1 T _ L :E ::= jx 3(t)「dt = :8S (t)2dt -:T 工dt=1 COS(2t11 dt =_2 2.Therefore, ;cos(t 「dt尹丰;'|x1[ n]|l 4丿2=1. therefore,nu[n]jx i [ n]|4 =3X 2[n]_1NP:: = lim - x 2[n]N Y 2N +1 7以2屮」| nE::'n] 2二::X 3[n]=cos1 . Therefore, 14丿 21 Nlim -------- '、'N ;:2N E* Sjx 3[n]| 匚cosgn) ^cos(^j- N 1 亠cos( n) 17( 2 )二1 烛 2 2 2n) 匚1 V 伍1 lim --------- \ cos —j2N 4 The signal x[n] is shifted by 3 to the right. The shifted signal lim -— =N:.:2N 1 1.4. (a) will be zero for n <1, And n>7. (b) The signal x[n] is shifted by 4 to the left. The shifted signal will be zero for n<-6. And n>0. (c) The sig nal x[n] is flipped sig nal will be zero for n<-1 and n>2. (d) The signal x[n] is flipped and the flipped signal is shifted by 2 to the right. The new Sig nal will be zero for n v-2 and n>4. (e) The signal x[n] is flipped and the flipped and the flipped signal is shifted by 2 to the left. This new sig nal will be zero for n<-6 and n>0. 1.5 . (a) x(1-t) is obtained by flipping x(t) and shifting the flipped signalby 1 to the right. Therefore, x (1-t) will be zero for t>-2.(b) From (a), we know that x(1-t) is zero for t>-2. Similarly, x(2-t) is zero for t>-1, Therefore, x (1-t) +x(2-t) will be zero for t>-2.(c) x(3t) is obta ined by lin early compressi on x(t) by a factor of 3. Therefore, x(3t) will bezero for t<1.(d) x(t/3) is obta ined by lin early compressi on x(t) by a factor of 3. Therefore, x(3t) will bezero for t<9.1.6 (a) x«t ) is not periodic because it is zero for t<0.(b) X 2[ n ]=1 for all n. Therefore, it is periodic with a fun dame ntal periodof 1. (c) X 3[ n ] is as shown in the Figure S1.6.X3Therefore 1.7 . (a) 邛X」n 】)= /ith a fun -4 1r2Xi [n] X -ame ntal period 11 4=-(u[ n] —u[r 2- 5n—4] +u[—n] —u[ of 4. —n —4]) Therefore, x[n] is zero for (b) Si nee x*t) is an odd sig nal, 昭X 3[n]島如如⑴耳律| X 1【n 】 >3. (c) x [n ] is zero for all values of t. f 1 ) u[n -3] ■ 12丿丄i u[ J • 3]I(d) Therefore, X^n] is zero when n <3 and when 1, 丄,八、1 一 五t . n 「:: 1 , 1 一五t 5t, 1 (xe 尸^(xQ+xZ)*1 e u (t_2)-eu (T+2)]5t 1.8 . (a)(b) (c) ‘ f 2、八4、‘ 八4、‘‘ 2 — - Therefore, ^(t) is zero only when 叹{为⑴}产「2 =2e0t cos(Ot 二) [ •:{X2(t)}二.2 cos 仃)cos(3t 亠2c ) =cos(3t) =e°tcos(3t 亠0) : T{X3(t)} =e^sin(3 二 t)=e±sin(3t ?)(d)1.9 . (a) (b) Therefore, X 2 • 2t . t -2t 二{X 4(t)} - -e sin(1°0t)=e sin(1°0t 二)=ecos(1°Ct 3) (t) is a periodic complex exp onen tial. (t) is a complex exp onen tial multiplied by a decay ing exp onen tial. X 1(C) X 2(t) is not periodic.X3[n] is a periodic signal.X3[n]=e j7n?= e jn?.xjn] is a complex exp onen tial with a fun dame ntal period (d)加 is a periodic sig nal. The fun dame ntal period isof —.2give n byN=m(2 )3 二 / 5=m(10) By choos ing m=3. Weobta in the fun dame ntal period to be 10. (e) X5【n] is not periodic. cannot find any in teger m such that m(x [n] is a complex exponential with w =3/5. We 2二)is also an integer. W o Therefore, x [n] is not periodic. 1.10 . x (t)=2cos(10t +1)-sin(4t-1) Period of first term in the RHS = Period of first term in the RHS = 2 二 - T =2 Therefore, the overall signal is periodic with a period which the least com mon multiple of the periods of the first and second terms. This is equal to 二. 1.11 . .7 2x[ n] = 1+ e F?e 3Period of first term in the RHS =1. Period of second term in the RHS = =7 (whe n m=2) 2 一 =5 (whe n m=1) Therefore, the overall signal x[n] is periodic with a period which is the least com mon Multiple of the periods of the three terms inn x[n].This is equal to 35. 1.12 . The signal x[n] is as shown in figure S1.12. x[n] can be obtained by flipp ing u[n] and the n Shifting the flipped signal by 3 to the right.This implies that M=-1 and no=-3.Period of second term in the RHS = Therefore, x[n]二 u[-n+3].1.13 y (t)=E ::Figure S 1.12二 42二 dt (2)Therefore x (t) and its derivativeX[n ]g (t) are show n in FigureS1.14.1.14 The signalLet x 3(t) be a lin ear comb in ati on of x 1 (t) x 1 (t)+b x 2 (t)Where a and b are arbitrary scalars .If x system ,the n the corresp onding output y X 3( sin(t))This implies that A 1=3, t 1 =0, A 2 =-3, and t 2=1.1.15 (a) The signal x 2 [n], which is the in put to S 2 , is the same asy 1[ n] .Therefore ,y 2【n]= x 2【n-2]+ 12 x 2〔n-3]=y 11【n-2]+ 1 2y 1【n-3]=2x 1 [n-2] +4x 1 [n-3] + 12( 2x1[n-3]+ 4x1[n-4])=2x 』n-2]+ 5x Jn-3] + 2x Jn-4]The in put-output relatio nship for S isy[n ]=2x [n-2]+ 5x [n-3] + 2x [n-4](b) The in put-output relatio nship does not change if the order in which SpndJn], which is the in put to S 1 isS 2 are conn ected series reversed. . We can easily prove this assu mingthat S 1 follows S 2 • In this case , the sig nal x the same as y 2[n]. Therefore y =2( x =2 x i [n]+ 4x i [n-1] 2【n]+4 y 2【n-1] 1 12 [n-2]+ - x 2 [n-3] )+4(x 2 [n-3]+ 12 2 2 [n-2]+5x 2 [n-3]+ 2 x 2 [n-4] Jn] =2x =2y 2 [n-4]) The in put-output relatio nship for S is once aga in y[n ]=2x[ n-2]+ 5x [n-3] + 2x [n-4] 1.16 (a)The system is not memory less because y[n] depends on past values of x[n]. (b) The output of the system will be y[n]= 、. [ n ]、 [ n — 2(c) F rom the result of part (b), we may con clude that the system output is always zero for in puts of the form [ n - k], k ?. Therefore , the system is not in vertible . 1.17 (a) The system is not causal because the output y(t) at some time may depend on future values of x(t). For instanee , y(- ■: )=x(0). (b) Con sider two arbitrary in puts x 1 (t)a nd x x 1 (t) > y 1 (t)= x 2(t). i (sin (t)) =0 X 2(t) > y 2 (t)= x 2 (sin(t)) and x 2(t).That is , x 3(t)=a3 (t) is the in put to the give n3(t) is y3(t)==a x 1(si n( t))+ x 2(si n( t))=a y 1 (t)+ by 2 (t) Therefore , the system is lin ear. 1.18 .(a) Con sider two arbitrary in puts x 』n]and x 2 [n]. n*io X 』n] > y 1 [n] = '、xdk]k =n _n °n *oX 2【n ] > y 2[n] = 、X 2[k] k ^-no 』n] and x 2【n] is the in put Let x 3 [n] be a lin ear comb in atio n of x X 3[ n]= ax 1[n ]+b x where a and b are arbitrary scalars. If 2 [n]. That is : X 3【n] to the given the n the corresp onding output y 3【n] is 3【n]= system,n n o' X 3【k]k=n 』on n o =ay n n o(ax 1[k ] bx 2[k])=a 二 xjkl +b 二 X 2[k ]k =n -n o 』n]+b y 2【n]心-n o k =n -r i o Therefore the system is lin ear. (b) Con sider an arbitrary in put x y i [n]= Jn ].Let n n o ' x/k] k =n -n obe the corresp onding output .Con sider a sec ond in put x shifti ng x 1[n] in time: 2 [n] obtained by X 2【n]= x 』n-n J The output corresp onding to this in put is n n 0 Also note that y 2【n ]二 n n o ' x 2[k] = ' x 」k - n 1]= k =n .n '0k =n. i [n- n Therefore , This implies that the system is time-i nvaria nt. (c) If x[n] <B, then y[n] -(2 n Therefore ,C 1.19 (a) (i) > y 1 (t)= t 2[n]= y n -n 1 m Z X 1[k ]k -n ■ q -n° 1]= ' X 1[k]. k -n .n 1 -n ° [n- n 1] y[n] -(2 n o +1)B. Con sider two arbitrary in puts 2X 1(t-1) o +1)B. x 1 (t) and x 2(t). i(t)x t 2X 2(t-1) Let x 3(t) be a lin ear comb in atio n of x 1 (t) x 1 (t)+b x 2 (t)2(t)、y 2 (t)=and x 2(t).That is3(t)=a=a 2x 12[n-2]+b 2x 22[n-2]+2ab x 』n-2] x 2[n-2] -ay 』n]+b y 2 [n]Therefore the system is not linear. (ii) Con sider an arbitrary in put x 』n]. Let ybe the corresp onding output .Con sider a sec ond in put x shifti ng x 1[n] in time:xjn]= x 』n-n dThe output corresp onding to this in put is y 2 [n] = xThis implies that the system is time-i nvaria nt. (c) (i) Con sider two arbitrary in puts x』n]and x 2 [n]. x 』n] rjn] = x 』n+1]- x 』n-1] x 2 [n ] - y 2[n] = x 2 [n+1 ]- x 2[n -1]where a and b are arbitrary scalars. If x 3(t) then the corresponding output y 3 (t) is y =t 2(ax 1(t-1)+b x 2(t-1)) =ay 1 (t)+b y 2 (t)Therefore , the system is lin ear. (ii) Con sider an arbitrary in puts x 1 (t).Let is the in put to the give n system,3(t)= t 2X 3 (t-1)be the corresp onding output .Con sider a sec ond in put x shifting x 1 (t) in time: 1(t)= t2X 1(t-1)2 (t) obtained byX 2(t)二 xThe output corresponding to this input t 0) Also note that y 2(t) Therefore the system is not time-i nvaria nt. (b) (i) Con sider two arbitrary in puts x yd n] = x i 2[n-2] x be a lin ear comb in ati on of x 1 1(t-t)is y2(t) = t 2x 2(t-1)= t 2x 1 (t- 1-1(t-to)=(t-t』n]and x 2 [n]. o)2X 1(t-1- t 0)-1[n]—Let X 3(t) X 2【n] where a and b are arbitrary scalars. If the n the corresp onding output y 3[n] is=(a x 』n-2] +b x 2 [n] = x [n]and x 2 [n].That is x2【n ] > y 22 [n-2]. 3【n]二 ax 』n]+b X 3【n] is the in put to the y 3 [n] = x 』n-2])given system, 32[n-2] 1[n] = x 12 [n-2]2[n] obtained by2 [n-2].= x / [n-2- n (J』n- n 0]= x 12[n-2- n 0 2【n]= y 1 [n- n 』Also note thatTherefore ,Let x 3[n] be a lin ear comb in ati on of x Jn] and x 2 [n]. That is :Therefore the system is lin ear.(ii) Con sider an arbitrary in put x be the corresp onding output .Con sider a sec ond in put x shifting x1[n] in time: x 2[n]= x 』n-n 0]The output corresp onding to this in put isy 』n]二 x 2【n +1]- x 2 [n -1]= x 』n+1- n °]- x 』n-1- n °]Also note thaty』n-n 0]= x 』n+1- n 0]- x 』n-1- n 0]Therefore ,y2[n]= y 』n-n 0 ]This implies that the system is time-inva ria nt.(d) (i) Con sider two arbitrary in puts x1 (t) and x 2(t).X 1 (t) t y 1 (t)= od 'x 1 (t) /X 2(t)T y 2(t)=Od * 2 (t) /Let x 3 (t) be a lin ear comb in ati on of x1(t) and x 2(t).That is x3(t) =ax 1 (t)+b x 2 (t)where a and b are arbitrary scalars. If x 3(t) is the in put to the give n system, then thecorresponding output y 3 (t) is y3 (t)= Od 》3 (t) ?二空1 (t) + b X 2 (t)』=a od <x 1 (t) '+bQd \2 (t)上 ay 1 (t)+b y 2(t)Therefore the system is lin ear. (ii) Con sider an arbitrary in puts x1 (t).Lety 1 (t)= Od&1(t)}=x 1⑴-x 1(-t )2be the corresp onding output .Con sider a sec ond in put x 2 (t) obta ined byshifting x1 (t) in time:X 2(t)二 x 1 (t-t 0)The output corresp onding to this in put isy 2 (t)= c )d "x 2 (t) ;= x2(t )- X 2( Y ) 2=X1(t-t o )-X 1(T —t o )2X 3【n]= ax 1[n ]+b x where a and b are arbitrary scalars. the n the corresp onding output y 3 [n] is 2【n] If x 3[n] is the input to the given system, 3【n]= x 3【n+1]- x =a x 1[ n+1]+b X 2【n3【n-1] +1]-a x 』n-1]-b x 2 [n -1] =a(x 』n+1]- x 』n-1])+b(x 2 [n +1]- x 2 [n-1]) =ay i [n]+b y 别]』n].Lety 』n]二 x 』n+1]- x 』n-1]2 [n] obtained byAlso note that y 1 (t-t 0)= X1(t-t o)-x1(T —t。
信号与系统_第二版_奥本海默 _课后答案[1-10章]
![信号与系统_第二版_奥本海默 _课后答案[1-10章]](https://img.taocdn.com/s3/m/6ff45c8f83c4bb4cf6ecd112.png)
学霸助手[]-课后答案|期末试卷|复习提纲
学霸h助us手 Contents baz Chapter 1 ······················································· 2 xue Chapter 2 ······················································· 17
e 5 = 5 j0 ,
e -2 = 2 ,jp
e -3 j = 3
-
j
p 2
e 1
2
-
j
3 2
=
, -
j
p 2
e 1+ j =
2
, j
p 4
( ) 1- j e 2 =2
-
j
p 2
ep
j(1- j) = 4 ,
e 1+
1-
j j
=
p 4
e 2 + j 2 = -1p2
1+ j 3
ò e 1.3.
(a)
xue学ba霸zh助usS手hoiug.ncoaml(Sseco&nd EdSitioyn)stems
—Learning Instructions
xu(eEbxe学arzc霸hisue助sshA手onus.wceorms)
Department
of
Computer 2005.12
Enginexeurein学bga霸zh助us手
=¥
E¥
0
-4tdt
=
1 4
,
P ¥ =0, because
E¥ < ¥
手 om ò (b)
x e , 2(t) = j(2t+p4 )
信号与系统chapter 7离散时间信号与系统的Z域分析
由此可见,位移特性Z域表达式中包含了系统的起始条 件,把时域差分方程转换为Z域代数方程,因此,可以方便 求出Z域的零输入响应和两状态响应。
式(7.3)又称为左移序性质,与拉普拉斯变换的时域 微分特性相当。式(7.4)又称右移序性质,与拉普拉斯变 换的时域积分特性相当。
进一步,对于因果序列 x ( n ) , x ( 1 ) 0 ,x ( 2 ) 0 , ,则
Z [nx(n)u(n)]zdd zn∞ 0znx(n)zdd zX(z)
求下列序列的Z变换。
(1) n 2 u ( n )
n(n 1)
(2)
u(n)
解:(1 )Z[n2 u(n)] zd d z 2zz 1 zd d z2 zd d z zz 1
dz
z2 z
z [
]
, z 1
zlnz1 1ln1 zzlnzz1,z1
(2)因为
Z1
u(n 1) , z 1 z 1
根据Z域积分特性,可得
∞1
X(z)
x 1dx∞
1
z dxln ,z1
2
z x1
z x(x1 )
z1
§ 6. 卷积和定理
若 x1(n)u(n) ZX 1(z),z Rx;x2(n)u(n) ZX2(z),z Rx,则 :
第七章 离散时间信号与系统的Z域分析
7.1引言 7.2 Z 变换 7.3 Z 变换的性质 7.4 反变换 7.5离散时间系统的 Z 域分析 7.6离散时间系统的系统函数与系统特性 7.7离散时间系统的模拟
7.1 引 言
按照与连续时间信号与系统相同的分析方法,本章将
讨论离散时间信号与系统的 z 域分析。
§ 4. Z域微分特性
(完整版)信号与系统奥本海姆_习题答案
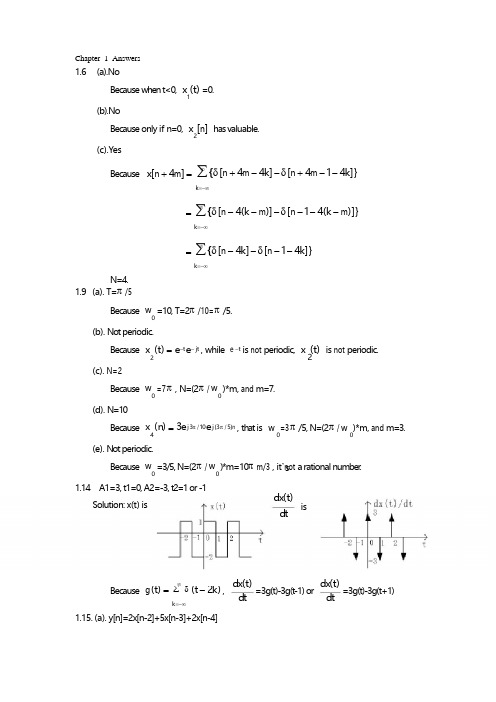
∑ {δ [n + 4m - 4k ] - δ [n + 4m - 1 - 4k ]}∑ {δ [n - 4(k - m )] - δ [n - 1 - 4(k - m )]}∑ {δ [n - 4k ] - δ [n - 1 - 4k ]}s Because g (t ) =∑ δ (t - 2k ) ,Chapter 1 Answers1.6 (a).NoBecause when t<0, x (t ) =0. 1(b).NoBecause only if n=0, x [n ] has valuable.2(c).Y esBecause x[n + 4m ] ===∞ k =-∞ ∞ k =-∞ ∞ k =-∞N=4.1.9 (a). T=π /5Because w =10, T=2π /10= π /5.(b). Not periodic.Because x (t ) = e -t e - jt , while e -t is not periodic, x (t ) is not periodic.2 2(c). N=2Because w =7 π , N=(2 π / w )*m, and m=7.0 0(d). N =10Because x (n) = 3e j 3π / 10 e j (3π / 5)n , that is w =3 π /5, N=(2 π / w )*m, and m=3.4 0(e). Not periodic.Because w =3/5, N=(2 π / w )*m=10π m/3 , it ’not a rational number .1.14 A1=3, t1=0, A2=-3, t2=1 or -1Solution: x(t) isdx(t )dtis∞ k =-∞1.15. (a). y[n]=2x[n-2]+5x[n-3]+2x[n-4]dx(t ) dx(t )=3g(t)-3g(t -1) or =3g(t)-3g(t+1)d t dt2 22 12Solution:y [n ] = x [n - 2] + 1x [n - 3] 2 2 1= y [n - 2] + y [n - 3]1 1= {2 x [n - 2] + 4 x [n - 3]} + {2 x [n - 3] + 4 x [n - 4]}1 1 1 1 =2 x [n - 2] + 5x [n - 3] + 2 x [n - 4]1 11Then, y[n ] = 2 x [n - 2] + 5x[n - 3] + 2 x [n - 4](b).No. For it ’s linearity .the relationship be tw e en y [n ] and x [n ] is the same in-out relationship with (a).1 2you can have a try.1.16. (a). No.For example, when n=0, y[0]=x[0]x[-2]. So the system is memory . (b). y[n]=0.When the input is A δ [n ] ,then, y[n] = A 2δ [n]δ [n - 2] , so y[n]=0.(c). No.For example, when x[n]=0, y[n]=0; when x[n]= A δ [n ] , y[n]=0.So the system is not invertible.1.17. (a). No.For example, y(-π ) = x(0) . So it ’s not causal.(b). Y es.Because : y (t ) = x (sin(t )) ,y (t ) = x (sin(t ))1 122ay (t ) + by (t ) = ax (sin(t )) + bx (sin(t ))1 2121.21. Solution:W e(a).have known:(b).(c).(d).1.22.Solution:W e have known:(a).(b).(e).22 E {x(t )} =(g)1.23. Solution:For1[ x (t ) + x(-t )] v 1O {x(t )} = [ x (t ) - x(-t )] dthen, (a).(b).(c).1.24.2Solution:For:E {x[n ]} = v 1 2( x [n ] + x[-n ])1O {x[n]} = ( x [n ] - x[-n ]) dthen,(a).(b).Solution: x(t ) = E {cos(4π t )u(t )}s(c).1.25. (a). Periodic. T=π /2.Solution: T=2π /4= π /2. (b). Periodic. T=2.Solution: T=2π / π =2. (d). Periodic. T=0.5.v1= {cos(4πt )u (t ) + cos(4π (-t ))u (-t )}2 1= cos(4π t ){u (t ) + u(-t )}2 1= cos(4π t )2So, T=2π /4 π =0.51.26. (a). Periodic. N=7Solution: N= 2π* m =7, m=3.6π / 7(b). Aperriodic.Solution: N= 2π 1/ 8* m = 16m π , it ’not rational number .(e). Periodic. N =16Solution as follow:2 cos( n ) , it ’s period is N=2π *m/( π /4)=8, m=1.sin( n ) , it ’s period is N=2π *m/( π /8)=16, m=1.(2). g (t ) ∑δ (t - 2k )π π π πx[n ] = 2 cos( n ) + sin( n ) - 2 cos( n + 4 8 2 6)in this equation,π4 π8π π- 2 cos( n + 2 6) , it ’s period is N=2π *m/( π /2)=4, m=1.So, the fundamental period of x[n ] is N=(8,16,4)=16.1.31. SolutionBecausex (t ) = x (t ) - x (t - 2), x (t ) = x (t + 1) + x (t ) .2 11311According to LTI property ,y (t ) = y (t ) - y (t - 2), y (t ) = y (t + 1) + y (t )2 11311Extra problems:1. SupposeSketch y(t ) = ⎰t-∞x(t )dt .Solution:2. SupposeSketch:(1). g (t )[δ (t + 3) + δ (t + 1) - 2δ (t - 1)]∞k =-∞Because x[n]=(1 2 0 –1) , h[n]=(2 0 2) , the nSolution: (1).(2).Chapter 22.1 Solution:-1(a).So,y [n ] = 2δ [n + 1] + 4δ [n ] + 2δ [n - 1] + 2δ [n - 2] - 2δ [n - 4]1(b). according to the property of convolutioin:y [n ] = y [n + 2]2 1(c). y [n] = y [n + 2]31=∑ x[k ]h [n - k ]( ) 0 - ( ) (n +2)-2+1= ∑ ( ) k -2 u[n] = 2 u[n]2 ⎩0, elsewhere W e have known: x[n] = ⎨ ⎩0,elsewhere , h[n] = ⎨ ,( N ≤ 9 ), , ∑ h[k ]u[n - k ]∑ (u[k ] - u[k - N - 1])(u[n - k ] - u[n - k - 10])∑ (u[k ] - u[k - N - 1])(u[4 - k ] - u[-k - 6])⎧∑ 1,...N ≤ 4⎪∑1,...N ≥ 4 ⎪⎩∑ (u[k ] - u[k - N - 1])(u[14 - k ] - u[4 - k ])2.3 Solution:y[n ] = x[n ]* h [n ]∞ k =-∞ ∞1= ∑ ( ) k -2 u [k - 2]u [n - k + 2]2k =-∞1 1 n +2 121 k =2 1 -21= 2[1 - ( ) n +1 ]u [n ]2the figure of the y[n] is:2.5 Solution:⎧1 ....0 ≤ n ≤ 9 ....⎧1 0≤ n ≤ N .... Then,x[n] = u[n] - u[n - 10] , h[n] = u[n] - u[n - N - 1]y[n] = x[n]* h[n] =∞k =-∞=∞ k =-∞So, y[4] =∞ k =-∞N⎪ ⎪ = ⎨k =04k =0=5, the n N ≥ 4And y[14] =∞ k =-∞⎧∑ 1,...N ≤ 14⎪∑1,...N ≥ 14 ⎪⎩ ∑ x[k ]g [n - 2k ]∑ x[k ]g [n - 2k ] = ∑ δ [k - 1]g [n - 2k ] = g [n - 2]∑ x[k ]g [n - 2k ] = ∑ δ [k - 2]g [n - 2k ] = g [n - 4]∑ x[k ]g [n - 2k ] = ∑ u[k ]g [n - 2k ] = ∑ g [n - 2k ]N⎪ ⎪= ⎨ k =514k =5∴N = 4=0, the n N < 52.7 Solution:y[n] =∞k =-∞(a ) x[n] = δ [n - 1] , y[n] =∞∞k =-∞ k =-∞ (b)x[n] = δ [n - 2] , y[n] =∞∞k =-∞k =-∞(c) S is not LTI system..(d) x[n] = u[n] , y[n] =∞ ∞∞k =-∞k =-∞ k =02.8 Solution:y(t ) = x(t ) * h (t ) = x(t ) *[δ (t + 2) + 2δ (t + 1)]= x(t + 2) + 2 x (t + 1)Then,⎩ = ⎰ u(τ - 3)e -3(t -τ )u(t - τ )d τ - ⎰ u(τ - 5)e -3(t -τ )u(t - τ )d τ⎩= u(t - 3)⎰ e -3(t -τ ) d τ - u(t - 5)⎰ e -3(t -τ ) d τ⎧t + 3,..... - 2 < t < -1 ⎪4,.......... t = -1 ⎪⎪That is, y(t ) = ⎨t + 4,..... - 1 < t ≤ 0⎪2 - 2t,....0 < t ≤ 1 ⎪ ⎪0,....... others2.10 Solution:(a). W e know:Then,h '(t ) = δ (t ) - δ (t - α )y '(t ) = x(t ) * h '(t ) = x(t ) *[δ (t ) - δ (t - α )]= x(t ) - x(t - α )that is,⎧t,.....0 ≤ t ≤ α ⎪α ,....α ≤ t ≤ 1So, y(t ) = ⎨⎪1 + α - t,.....1 ≤ t ≤ 1 + α ⎪0,.....others(b). From the figure of y '(t ) , only if α = 1 , y '(t ) would contain merely therediscontinuities.2.11 Solution:(a).y(t ) = x(t ) * h(t ) = [u (t - 3) - u (t - 5)]* e -3t u (t )∞ ∞-∞-∞tt35= ⎨⎰ e -3(t -τ ) d τ = ,.....3 ≤ t < 5 ⎪ 3 ⎪⎰ e -3(t -τ ) d τ - ⎰ e -3(t -τ ) d τ = - e ⎪ t9-3t + e 15-3t ⎪⎩ s y(t ) = e -t u (t ) * ∑ δ (t - 3k ) = ∑ [e = ∑ e -(t -3k )u (t - 3k )y(t ) = e -t [ ∑ e 3k u (t - 3k )] = e -t∑ ew [n ] = 1w [n - 1] + x[n ]⎧⎪ ⎪0,................. t < 3⎪ t1 - e 9-3t3t353,...... t ≥ 5(b). g (t ) = (dx(t ) / dt ) * h(t ) = [δ (t - 3) - δ (t - 5)]* e -3t u (t )= e -3(t -3) u (t - 3) - e -3(t -5) u (t - 5)(c). It ’obvious that g (t ) = d y (t ) / dt .2.12 Solution∞∞k =-∞k =-∞∞k =-∞Considering for 0 ≤ t < 3 ,we can obtain-t u (t ) * δ (t - 3k )]∞k =-∞0 k =-∞3k= e -t 11 - e -3.(Because k mu st be negetive , u (t - 3k ) = 1 for 0 ≤ t < 3 ).2.19 Solution:(a). W e have known:2 (1)y[n ] = αy[n - 1] + βw [n ](2)then, H ( E ) = H ( E ) H ( E ) =βE 2= .... or : (α + ) = ∴⎨ 2 8 ⎝ 2 = - E ∴ h [n ] = ⎢2( ) n - ( ) n ⎥u [n ] ⎩Θ⎰⎰ sin(2πt )δ (t + 3)dt has value only on t = -3 , but - 3 ∉ [0,5]⎰ sin(2πt )δ (t + 3)dt =0Θ⎰-4from (1), H ( E ) =E1E -1 2from (2), H ( E ) =2 βEE - α121 ( E - α )(E - )2 = β1 α 1 - (α + ) E -1 + E -22 21 α∴ y[n ] - (α + ) y[n - 1] + y[n - 2] = βx[n ]2 21 3but, y[n ] = - y[n - 2] + y[n - 1] + x[n ]8 4⎧α 1 ⎛1 ⎪ 3 ⎫ ⎪4 ⎭ ⎧ 1 ⎪α = ∴⎨ 4⎪β = 1(b). from (a), we know H ( E ) = H ( E ) H ( E ) =1 22E +1 1 E - E -4 2⎡ 1 1 ⎤ ⎣ 24 ⎦2.20 (a). 1⎪⎩β = 1E 21 1 ( E - )(E - ) 4 2(b). 0∞-∞ u (t ) cos(t )dt =⎰∞ δ (t ) cos(t )dt = cos(0) = 1-∞Θ∴(c). 05 0 5 05-5 u (1 - τ ) cos(2πτ )d τ = -⎰6 u (t ) cos(2πt )dt1 1= -⎰6 δ '(t ) cos(2πt )dt-4= cos '(2π t ) |t =0= -2π sin(2πt ) |t =0= 0∑ δ (t - kT ) * h (t )∑ h (t - kT )⎰ y(t )d t , A = ⎰ x(t )dt ,A = ⎰ h(t )d t .⎰ x(τ ) x (t - τ )d τ⎰ y(t )dt = ⎰ ⎰ x(τ ) x (t - τ )d τd t= ⎰ ⎰ x(τ ) x (t - τ )dtd τ = ⎰ x(τ ) ⎰ x(t - τ )dtd τ⎰ x(τ ) ⎰ x(ξ )d ξ d τ = ⎰ x(τ )d τ{ ⎰ x(ξ )d ξ}2.23 Solution:Θ y(t ) = x(t ) * h (t ) =∞k =-∞=∞ k =-∞∴2.27 SolutionA = y∞ ∞ ∞ x h-∞ y(t ) = x(t )* h(t ) = -∞ -∞ ∞-∞A = y∞ ∞ ∞-∞ -∞ -∞∞ ∞∞∞-∞ -∞-∞ -∞= ∞ ∞ ∞ ∞-∞= A Ax h-∞ -∞ -∞⎰e ⎰ eδ (τ - 2)d τ = ⎰ e⎰ u(τ + 1)eu(t - 2 - τ )d τ - ⎰ u(τ - 2)e= u(t - 1) ⎰ ed τ - u(t - 4) ⎰ e-(t -2-τ )d τ2.40 Solution(a) y(t ) = t-(t -τ) x(τ - 2)d τ ,Let x(t ) = δ (t ) ,then y(t ) = h (t ) .-∞So , h(t ) = t t -2-(t -τ ) -∞-∞-(t -2-ξ )δ (ξ )d ξ = e -(t -2)u(t - 2)(b)y(t ) = x(t )* h(t ) = [u(t + 1) - u(t - 2)]* e -(t -2)u(t - 2)=∞ ∞ -(t -2-τ )-∞-∞-(t -2-τ )u(t - 2 - τ )d τt -2-1-(t -2-τ ) t -2 2= u(t - 1)[e -(t -2) e τ ]| t -2 -u(t - 4)[e -(t -2) e τ ]| t -2-1 2= [1- e -(t -1) ]u(t - 1) - [1- e -(t -4) ]u(t - 4)2.46 SolutionBecaused d dx(t ) = [ 2e -3t ]u (t - 1) + 2e -3t [ u (t - 1)] d t dt d t= -3x(t ) + 2e -3t δ (t - 1) = -3x(t ) + 2e -3δ (t - 1) .From LTI property ,we knowdd tx(t ) → -3 y (t ) + 2e -3 h (t - 1)whereh (t ) is the impulse response of the system.So ,following equation can be derived.2e -3h(t - 1) = e -2t u (t )Finally, h (t ) = 12e 3e -2(t +1)u (t + 1)2.47 SoliutionAccording to the property of the linear time-invariant system:(a). y(t ) = x(t ) * h(t ) = 2 x (t ) * h (t ) = 2 y (t )0 0(b). y(t ) = x(t ) * h(t ) = [ x (t ) - x (t - 2)]* h(t )1y(t)= x (t ) * h (t ) - x (t - 2) * h (t )0 2 4t= [ y (t )] = y (1). Because H ( P ) = 1so h (t ) = (1= 2 + E - E ⎪ [ ]⎪δ [k ] = i (-1 - i) n- (-1 + i) n u [n] so h [n ] = 2 2 i= y (t ) - y (t - 2)0 0(c). y(t ) = x(t ) * h(t ) = x (t - 2) * h (t + 1) = x (t - 2) * h (t ) * δ (t + 1) = y (t - 1)0 0(d). The condition is not enough.(e). y(t ) = x(t ) * h(t ) = x (-t ) * h (-t )0 0= ⎰∞ x (-τ )h (-t + τ )d τ-∞ = ⎰∞x (m )h (-t - m )dm = y (-t )-∞(f). y(t ) = x(t ) * h (t ) = x ' (-t ) * h ' (-t ) = [ x ' (-t ) * h (-t )] ' ' ' " (t )Extra problems:1. Solute h(t), h[n](1). d 2 dy(t ) + 5 y(t ) + 6 y(t ) = x(t )dt 2 dt(2). y[n + 2] + 2 y[n + 1] + 2 y[n ] = x[n + 1]Solution:1 1 - 1= = +P 2 + 5P + 6 ( P + 2)( P + 3) P + 2 P + 3- 1+)δ (t ) = (e -2t - e -3t )u (t )P + 2P + 3(2). Because H ( E ) = E E E= =E 2 + 2E + 2 ( E + 1) 2 + 1 ( E + 1 + i)( E + 1 - i)i i E - E2E + 1 + i E + 1 - i⎛ i ⎫+E + 1 + i E + 1 - i ⎪ 2 ⎪ ⎝ ⎭x(t ) = ∑ for the period of cos( 5πt ) is T = 63the period of sin( 22⎰ x 2 (t )e - jkw 2t d t = ⎰ ( x 1 (1- t ) + x 1 (t - 1))e - jkw 1t dtT T TChapter 33.1 Solution:Fundamental period T = 8 . ω = 2π / 8 = π / 4∞a e j ω0kt = a e j ω0t + a e - j ω0t + a e j 3ω0t + a e - j 3ω0tk 1 -1 3 -3k =-∞ = 2ej ω0t+ 2e - j ω0t + 4 je j 3ω0t - 4 je - j3ω0t π 3π= 4cos( t ) - 8sin( t )4 43.2 Solution:for , a = 1 , a0 -2= e - j π / 4 , a = e j π / 4 , a 2-4= 2e - j π / 3 , a = 2e j π / 34x[n] = ∑ a e jk (2π / N )nkk =< N >= a + a e j (4π / 5)n + a e - j (4π / 5)n + a e j (8π / 5)n + a e - j (8π / 5)n0 2-24-4= 1 + e j π / 4 e j (4π / 5)n + e - j π / 4 e - j (4π / 5)n + 2e j π / 3e j (8π / 5)n + 2e - j π / 3e - j (8π / 5)n4 π 8 π= 1 + 2 cos( πn + ) + 4 cos( πn + )5 4 5 3 4 3π 8 5π= 1 + 2sin( πn + ) + 4sin( πn + )5 4 5 63.3 Solution:2πt ) is T= 3 , 3so the period of x(t ) is 6 , i.e. w = 2π / 6 = π / 32π 5π x(t ) = 2 + cos(t ) + 4sin(t )331= 2 + cos(2w t ) + 4sin(5w t )0 0 1= 2 + (e j 2w 0t + e - j 2w 0t ) - 2 j(e j5w 0t - e - j5w 0t )2 then, a = 2 , a 0 -2 1= a = , a 2 -5 = 2 j , a = -2 j 53.5 Solution:(1). Because x (t ) = x (1 - t ) + x (t - 1) , the n x (t ) has the same period as x (t ) ,21121that is T = T = T ,w = w2121(2). b = 1 k⎰ x 1 (1- t )e - jkw 1t d t + 1 ⎰ x 1 (t - 1)e - jkw 1t dt ∑∑⎰ x(t ) 2 dt = a 0 2 + a -1 2 + a 1 2 = 2 a 1 2 = 1 Fundamental period T = 8 . ω = 2π / 8 = π / 4∑∑ a H ( jkw )ejkw 0tk ω ⎩0,......k ≠ 0⎧ ∑t Because a =⎰ x(t )d t = 1⎰4 1d t + 1 ⎰ 8(-1)d t = 0TT88 4= 1 T T T T= a e - jkw 1 + a e - jkw 1 = (a -k k3.8 Solution:-k+ a )e - jkw 1 kΘx(t ) =∞ k =-∞a e jw 0ktkwhile:andx(t ) is real and odd, the n a = 0 , a = -a 0 kT = 2 , the n w = 2π / 2 = πa = 0 for k > 1k-ksox(t ) =∞ a e jw 0kt = a + a e - jw 0t + a e jw 0tk 0 -1 1k =-∞= a (e j πt - e - j πt ) = 2a sin(π t )11for1 2 2 0∴∴a = ± 2 /21x(t ) = ± 2 sin(π t )3.13 Solution:Θx(t ) =∞ k =-∞a e jw 0ktk∴ y(t ) =∞k 0k =-∞H ( jk ω ) = sin(4k ω0 ) =⎨4,...... k = 00 0 ∴ y(t ) =∞a H ( jkw )e jkw 0= 4a k 00 k =-∞1Soy(t ) = 0 .∑∑a H(jkw)e jkw0tT t H(jw)=⎨if a=0,it needs kw>100T ⎰T⎰t dt=0T ⎰x(t)e-jkw0t dt=⎰te-jk22t dt=1⎰1te-jkπt dt11⎰1tde-jkπt2jkπ⎢-1⎦⎢(e-jkπ+e jkπ)-⎥-jkπ2c os(kπ)+-jkπ⎥⎦[2cos(kπ)]=j cos(kπ)=j(-1)k............k≠03.15Solution:Θx(t)=∞k=-∞a e jw0kt k∴y(t)=∞k=-∞k0∴a=1k ⎰Ty(t)H(jkw)e-jkw0d tfor⎧⎪1,......w≤100⎪⎩0,......w>100∴k0that is k2π100 >100,.......k>π/612and k is integer,so K>8 3.22Solution:a=10x(t)dt=112-1a= k 1T2-12-1π=-1 2jkπ-1=-1⎡⎢te-jkπt⎣1-1-e-jkπt-jkπ1⎤⎥⎥=-=-12jkπ12jkπ⎡(e-jkπ-e jkπ)⎤⎣⎦⎡2sin(kπ)⎤⎢⎣=-12jkπkπkπ⎰ h (t )e - j ωt d t = ⎰ e -4 t e - j ωt d t= ⎰ e e d t + ⎰ e -4t e - j ωt d t∑0 ∑∑Ta = ⎰ x(t )e - jkw 0t d t = ⎰1/ 2 δ(t )e - jk 2πt d t = 1T T-1/ 2 ∑T∑ (-1) δ (t - n ) .T=2, ω = π , a = 1T a = ⎰ x(t )e - jkw 0t d t = ⎰ δ (t )e - jk πt d t + ⎰ 3/ 2 (-1)δ (t - 1)e - jk πt d tT 2 -1/ 2 2 1/ 2 T 16 + (k π )23.34 Solution:∞ ∞H ( j ω ) =-∞-∞0 ∞ 4t - j ωt-∞118=+=4 - j ω 4 + j ω 16 + ω 2A periodic continous-signal has Fourier Series:. x(t ) =T is the fundamental period of x(t ) . ω = 2π / T∞ k =-∞a e j ω ktkThe output of LTI system with inputed x(t ) is y(t ) =Its coefficients of Fourier Series: b = a H ( jk ω )k k 0∞ k =-∞a H ( jk ω )e jk ω tk 0(a) x(t ) =∞ n =-∞ δ (t - n ) .T=1, ω = 2π a = 1 = 1 .0 k1 k(N ot e :If x(t ) =∞ n =-∞δ (t - nT ) , a =1 k)So b = a H ( jk 2π ) = k k 8 2=16 + (2k π )2 4 + (k π )2(b) x(t ) = ∞n =-∞n0 k= 11 1 1/2 1 k1= [1- (-1)k ] 24[1-(-1)k ]So b = a H ( jk π ) = ,k k(c) T=1, ω = 2π⎰ x(t )e - jk ω0t d t = ⎰1/ 4e - jk 2πt d t =∑∑ a H ( jkw )ejkw 0t⎪⎩0,......otherwise ⎩0,......otherwise H ( jw) = ⎨⎪, 14Let y(t ) = x(t ) , b = a , it needs a = 0 ,for k < 18..or .. k ≤ 17 .∑∑∑ 2n e - j ωn + ∑ ( )n e - j ωn1 =2 41 1 5∑a ejk ( N )n .a = k1 T T -1/ 4 k π sin(2 k π)b = a H ( jk π ) =k k k π8sin( )2 k π [16 + (2k π )2 ]3.35 Solution: T= π / 7 , ω = 2π / T = 14 .Θx(t ) =∞a e jw 0ktk∴y(t ) =k =-∞ ∞ k =-∞k 0∴b = a H ( jkw )k k 0for ⎧1,...... w ≥ 250 ⎧1,...... k ≥ 170 that is k ω 0 < 250,....... k < 250, and k is integer , so k < 18..or .. k ≤ 17 .kkk3.37 Solution:H (ej ω) = ∞n =-∞h [n ]e- j ωn=∞ n =-∞1 ( ) ne - j ωn 2-1∞1= 2n =-∞ n =0 1 3e j ω+ =1 - e j ω 1 - e - j ω - cos ω2 2 4A periodic sequen ce has Fourier Series: x [n ] =N is the fundamental period of x[n ] .k =< N >k2πThe output of LTI system with inputed x[n ] is y[n ] =∑ a H (ekj 2π k N)ejk ( 2π )n N .k =< N >∑4 .So b = a H (e j N k ) = 1 4 45 - cos( 2π k ) k =2 21 T ' 1 3T '-1 = ⎰ x(3t - 1)e T ' dt = ⎰ x(m )e = ⎰ x(m )e e⎡ 1T -1 T ⎢⎰∑a e jk (2π/T )t ,where a = 0 for every2π Its coefficients of Fourier Series: b = a H (ejN k )kk3(a) x[n ] =∞ k =-∞δ [n - 4k ] .N=4, a = 1 k k k 2π 4 4b =k3 165 π- cos( k ) 4 23.40 Solution:According to the property of fourier series:(a). a k '= a e - jkw 0t 0 + a e jkw 0t 0 = 2a cos(kw t ) = 2a cos(k k k k 0 0 k 2π t )T 0(b). Because E {x(t )} =v x(t ) + x(-t )2a ' a + a k 2-k= E {a }v k(c). Because R {x(t )} = x(t ) + x * (t )e'a + a *a = k-k k(d). a '= ( jkw ) 2 a = ( jk k 0 k 2πT) 2 ak(e). first, the period of x(3t - 1) is T ' =T3th e n ak ' 2π - jk t T ' 0 T ' -11 T -12π 2π - jkm - jk dmT TT -1- jk 2π m +1 dm T ' 3 3= e- jk 2π ⎣ T -1x(m )e2π- jk m T⎤dm ⎥⎦2π = a e- jk Tk3.43 (a) Proof:( i ) Because x(t ) is odd harmonic , x(t ) =non-zer o even k.∞ k =-∞k kx(t + ) = ∑ a e jk (2π /T )(t + 2 )T 2∑= - ∑ a e jk (2π /T )t(ii )Because of x(t ) = - x (t + ) ,we get the coefficients of Fourier Seriesa = ⎰ x(t )e - jk 2T π t d t = 1 ⎰ T / 2 x(t )e - jk 2T π t d t + 1 ⎰ T x(t )e - jk 2T π t d tT 0 T 0 T T /2 1 T /2 1 T /2 = ⎰ T dt + ⎰ x(t + T / 2)e x(t )e 1 T /2 1 T /2 = ⎰ x(t )eT dt - ⎰ x(t )(-1)k e T dt 1T /2It is obvious that a = 0 for every non-zer o even k. So x(t ) is odd harmonic ,-11x(t ) = ∑ δ (t - kT ) , T = π∞ T k k =-∞= ∞a e jk π e jk (2π /T )tkk =-∞∞kk =-∞It is noticed that k is odd integers or k=0.That meansTx(t ) = - x (t + )2T21 T k2π - jk t T 0 T 0 2π- jk (t +T / 2) Tdt2π 2π- jk t - jk t T 0 T 0= [1- (-1)k ] ⎰T 02π x(t )e- jk Tt d tk(b) x(t )1......-2-12 tExtra problems:∞ k =-∞(1). Consider y(t ) , when H ( jw) isx(t ) = ∑ δ (t - kT ) ↔T π T∑ a H ( jkw )ejkw 0t=1k =-∞ π∑∑π∑1(2). Consider y(t ) , when H ( jw) isSolution:∞k =-∞ 1 1 2π= , w = = 2 0(1).y(t ) =∞k 0∞k =-∞a H ( j 2k )e j 2ktk=2π (for k can only has value 0)(2).y(t ) =∞ k =-∞a H ( jkw )e jkw 0t =1k 0∞k =-∞a H ( j 2k )e j 2ktk=1π (e - j 2t + e j 2t ) =2 cos 2tπ(for k can only has value – and 1)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Z[a n x (n)u (n)] a n x (n) z n
n0 ∞
z
z
z x (n) a n 0
∞
n
即
z z a x(n)u(n) X , Rx a a
n Z
已知 数。
x(n) e cos nu (n)
dx
交换上式求和与求积分的次序,得
∞ ∞ ( n m 1) x ( n) m Z[ u (n)] z x(n) x dx z nm n0
z
m
∞ ∞
z
n ( m 1) x ( n ) x x dx n0
z
m
∞
X ( x) x
( m 1)
z
dx
求下列序列的Z变换。
m k 0 m 1
(7.3) (7.4)
Z[ x(n m)u(n)] z [ X ( z)
m
k m
k x ( k ) z ], z Rx
1
证明:由z变换的定义,可得
Z [ x(n m)u(n)] x(n m) z n
n 0 ∞
令 k n m ,则
an
,求其Z变换,式中 a 为常
解:因为
z( z cos ) cos n u(n) 2 , z 1 z 2z cos 1
Z
根据 Z 域展缩特性,可得
a a z e ( z e cos ) a Z[ean cos nu (n)] , z e 1 a 2 a ( ze ) 2 ze cos 1
,则 :
x(n) nm
u(n) z
Z
m
∞
X ( x) x
m 1
z
dx, z Rx
证明:由z变换定义可得:
Z[ x(n) nm u ( n )]
nm
n0
∞
x(n)
z
n
z
m
x(n) n m
n0
∞
z
(nm)
z
m
n0
∞
x(n)
∞
z
x
( n m 1)
(4)由Z变换的定义有
X 4 ( z) z z z
0
1
2
1
z 1 z 2
显然,该级数收敛域为Z平面上除原点以外的全 部区域,即 z 0 。
常见信号的 z 变换
§ 1.单位样值序列 (n)
Z[ (n)] (n) z n 1, z ≥0
n 0 ∞
n0
z
n0
∞
[
d dz
z ] x ( n)
n
交换上式求和与求导的次序,可得
Z[nx(n)u (n)] z z dz
n0
d
∞
n
x(n) z
d dz
X ( z)
求下列序列的Z变换。
(1)n u(n)
2
(2)
2
n(n 1) 2
u(n)
解:
d z d d z (1)Z[n u (n)] z z z d z z 1 d z d z z 1 d z z2 z z [ ] , z 1 2 3 dz ( z 1) ( z 1)
同理可证
Z [ x(n m)u(n)] z [ X ( z)
m
k m
k x ( k ) z ]
1
由此可见,位移特性Z域表达式中包含了系统的起始条 件,把时域差分方程转换为Z域代数方程,因此,可以方便 求出Z域的零输入响应和两状态响应。
式(7.3)又称为左移序性质,与拉普拉斯变换的时域 微分特性相当。式(7.4)又称右移序性质,与拉普拉斯变 换的时域积分特性相当。 进一步,对于因果序列 x(n) , x(1) 0, x(2) 0,
x ( n 1) z x(n) z
| x ( n) z
∞ n ∞
( n 1) n
n
| ∞
由比值判定法(达兰贝尔法)有: lim
n ∞
(7.2)
若 1 ,则级数绝对收敛; 若 1 ,则级数发散;
若 1 ,则级数可能收敛也可能发散;
求下列离散时间信号Z变换的收敛域:式中a,b为正数。
§ 4. Z域微分特性
Z
若 x ( n )u ( n ) X ( z ), z Rx ,则 :
Z
nx(n)u (n) z
dX ( z ) dz
n
, z Rx
∞
证明:由z变换的定义,可得
Z [nx(n)u(n)]
∞ n ∞
nx(n)u(n) z
z nz n 1 x(n)
即
( n) 1, z ≥0
Z
§ 2.单位阶跃序列 u (n)
Z[u(n)] z n 1 z 1 z 2
n 0 ∞
由等比级数求和公式,得
Z
X ( z ) Z[u (n)]
n0∞Βιβλιοθήκη zn1 1 z
1
z z 1
即
u (n)
z z 1
, z 1
7.2
z 变换
z 变换的定义
序列 x(n) 存在离散时间傅里叶变换的充分条件是满 足绝对可和,参照拉普拉斯变换的定义,引入一个衰减的 n n x ( n ) r r 指数序列 ,通过选择 r的值,使函数 满足绝 对可和的条件。 由离散时间傅里叶变换的定义可知
X (e ) DTFT [ x(n)]
7.3
§ 1.线性特性
Z
z 变换的性质
Z
若 x1 (n)u(n) X1 ( z ), z Rx1 ; x2 (n)u(n) X 2 ( z ), z Rx2 ,则 :
a1 x1 (n)u (n) a2 x2 (n)u (n) a1 X 1 ( z ) a2 X 2 ( z ), z max( Rx1 , Rx2 )
x ( n) z n
(7.1)
的变换称为 Z 变换:
这种由序列 x(n) 到函数 定义单边 Z 变换为:
X ( z)
X ( z ) x(n) z n
n 0
∞
注意,本书以单 边Z变换为研究对 象。
x(n) 称为 X ( z ) 的原序列,两者称 X ( z ) 称为 x(n) 的象函数,
Z
§ 2.位移特性
Z
若 x ( n )u ( n ) X ( z ), z Rx
,则 :
m
x(n m)u(n m) z X ( z ), z Rx
且位移序列的单边 Z 变换为
Z[ x(n m)u(n)] z [ X ( z) x( k ) z k ], z Rx
为 Z 变换对。
由原序列 x(n) 求其象函数 X ( z ) 的过程称为 Z 正变换,简 称Z变换,记为 X (z) Z [x(n)] 。反之,由 X (z) 确定 x(n) 的过程 称为Z反变换,记为 x(n) Z [ X ( z )] ,两者关系简记为:
1
Z
x ( n) X ( z )
2
n(n 1) n2 n (2)Z[ u(n)] Z[ u(n) u(n)] 2 2 2
z2 z z z2 , z 1 3 2 3 2( z 1) 2( z 1) ( z 1)
§ 5. Z域积分特性
Z
若
x ( n )u ( n ) X ( z ), z Rx
j n
x ( n )e
n
jn
则,函数
x(n)r
n
的离散时间傅里叶变换为
n
DTFT [ x(n)r ]
n ∞
∞
x ( n) r e
jn
令
z re , X ( z ) DTFT [ x(n)r ]
j
n
,则得到:
X ( z)
n ∞
∞
由式(7.1)可知,Z变换的定义也可由拉普拉斯变换引入。 有兴趣的读者可参阅相关书籍。
z 变换的收敛域
n x ( n ) z x ( n ) 对于任意有界序列 ,能使级数 收敛的所有
n ∞ ∞
Z值的集合称为 Z变换 X (z) 的收敛域,通常用ROC表示。 根据级数理论,该级数收敛的充分必要条件是
n ∞
n n n n b z a z n 0
1
∞
若要使该级数收敛,则
b z
n n ∞
1
n
和
a z
n n0
∞
n
均收敛,由
本例题中(1)、(2)的结论可知,应有
z b, 且 z a
因此当 a b 并且 a z b ,其Z变换才存在。
其如下图(c)所示。
n ∞ n 1 n 0
1
∞
∞
根据式(7.2)可知,若使该级数收敛,应满足
lim
即收敛域为
(a 1 z ) n 1 (a z )
1 n
n ∞
a z 1
1
z a, 且X 2 ( z ) 1
其如下图(b)所示。
1 1 a z
1
z za
(3)由Z变换的定义有
X 3 ( z)
0 (1) x1 ( n) n a
b n (3) x3 ( n) n a
n0 n≥0
n0 n≥0