第一章习题解答
第一章 习题答案
第一章 习题答案1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:d a ↔,c b ↔;(2)系统方框图如图解1-1 所示。
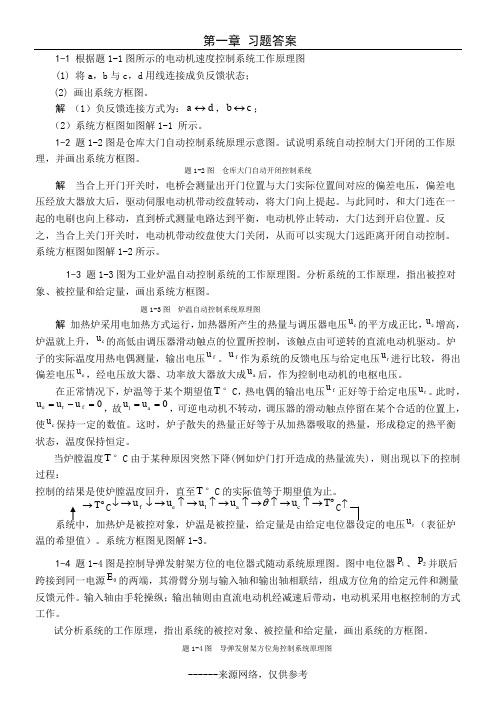
1-2 题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电解 c u 增高,偏差电压 r 。
此时,-=r e u u 使c u 过程:系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。
系统方框图见图解1-3。
1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器1P 、2P 并联后跨接到同一电源0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图 导弹发射架方位角控制系统原理图解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器1P 的滑臂转过一个输入角i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ-=,该误差角通过电位器1P 、2P 转换成偏差电压o i e u u u -=,e u 经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器2P 的滑臂转过一定的角度o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。
电路理论习题解答 第一章
1.5
u /V
内阻不为零
+ us
R0
I
+
u
RL
−
伏安关系曲线
−
I/A 0.15
0
1.5
u /V
注:这里的伏安关系曲线只能在第一象限,原因也是,一旦出了第一象限, u 和 I 的比值就 变为负的了,反推出的 RL 就变为负值了,与题意不符。
V
V
1.5V
1.5V
R 内阻为零时 内阻不为零时
R
1-9 附图是两种受控源和电阻 RL 组成的电路。现以 RL 上电压作为输出信号,1)求两电路的电 压增益(A,gmRL);2)试以受控源的性质,扼要地说明计算得到的结果。
1) 如果不用并联分压(在中学就掌握的东西),当然也可以用两个回路的 KVL 方程和顶部 节点的 KCL 方程,得出上面的 H(jω)的表达式,但是显然这样做是低效的。 2) 事实上,本课程的目的是希望学习者能够根据不同的题目,尽可能采用多种方法中的一 种最简单的方法去解决问题。因此, a) 只要没有要求,任意的逻辑完整的解题思路都是可取的; b) 学习者可以视自己的练习目的选择一种简单熟悉的方法、或者一种较为系统的方法、 或者多种方法来完成习题。
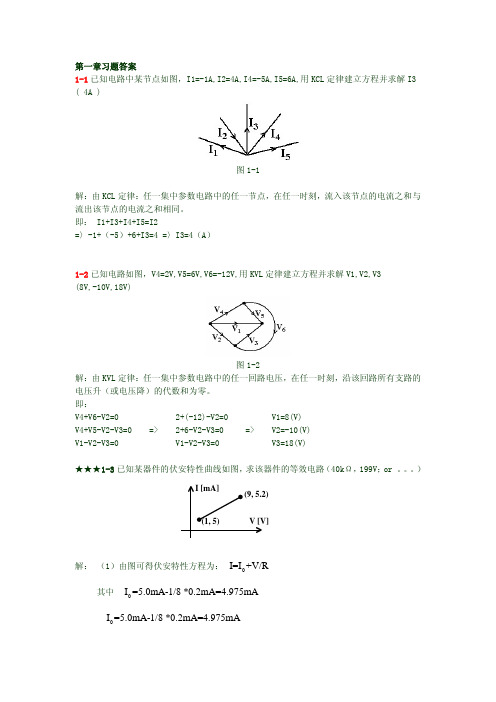
第一章习题答案 1-1 已知电路中某节点如图,I1=-1A,I2=4A,I4=-5A,I5=6A,用 KCL 定律建立方程并求解 I3 ( 4A )
图 1-1 解:由 KCL 定律:任一集中参数电路中的任一节点,在任一时刻,流入该节点的电流之和与 流出该节点的电流之和相同。 即: I1+I3+I4+I5=I2 =〉-1+(-5)+6+I3=4 =〉I3=4(A)
1 2
第一章部分习题解答

第一章部分习题解答1.设z 1,z 2,z 3三点适合条件:0321=++z z z ,1321===z z z 。
证明z 1,z 2,z 3是内接于单位圆1=z 的一个正三角形的顶点。
证 由于1321===z z z ,知321z z z Δ的三个顶点均在单位圆上。
因为 33331z z z ==()[]()[]212322112121z z z z z z z z z z z z +++=+−+−=21212z z z z ++=所以, 12121−=+z z z z ,又 )())((122122112121221z z z z z z z z z z z z z z +−+=−−=−()322121=+−=z z z z故 321=−z z ,同理33231=−=−z z z z ,知321z z z Δ是内接于单位圆1=z 的一个正三角形。
2.证明:z 平面上的直线方程可以写成C z a z a =+(a 是非零复常数,C 是实常数) 证 设直角坐标系的平面方程为C By Ax =+将)(i 21Im ),(21Re z z z y z z z x −==+==代入,得C z B A z B A =−+−)i (21)i (21令)i (21B A a +=,则)i (21B A a −=,上式即为C z a z a =+。
3.求下列方程(t 是实参数)给出的曲线。
(1)t z i)1(+=; (2)t b t a z sin i cos +=;(3)t t z i+=; (4)22it t z +=,解(1)⎩⎨⎧∞<<−∞==⇔+=+=t t y tx t y x z ,)i 1(i 。
即直线x y =。
(2)π20,sin cos sin i cos i ≤<⎩⎨⎧==⇔+=+=t t b y ta x tb t a y x z ,即为椭圆12222=+b y a x ;(3)⎪⎩⎪⎨⎧==⇔+=+=t y t x t t y x z 1ii ,即为双曲线1=xy ; (4)⎪⎩⎪⎨⎧==⇔+=+=22221ii t y t x t t y x z ,即为双曲线1=xy 中位于第一象限中的一支。
物理化学 答案 第一章_习题解答
-
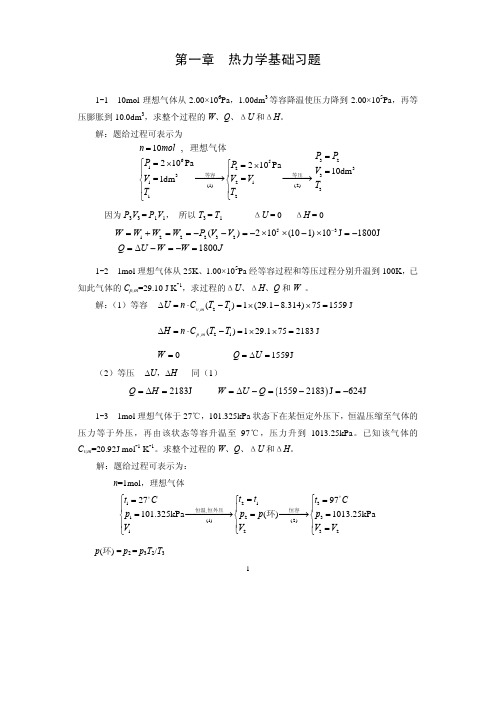
知此气体的 Cp,m=29.10 J·K 1,求过程的ΔU、ΔH、Q 和 W 。 解: (1)等容
ΔU = n ⋅ Cv ,m (T2 − T1 ) = 1 × (29.1 − 8.314) × 75 = 1559 J ΔH = n ⋅ C p ,m (T2 − T1 ) = 1 × 29.1 × 75 = 2183 J
η = −Wr / Q1 = (T1 − T2 ) / T1 = (500 − 300) / 600 = 40%
第二个卡诺热机效率
η ′ = −Wr / Q1′ = (T1 − T2′) / T1 = (500 − 250) / 600 = 50%
∵
η =η′
∴两个热机的效率不相同
(2)第一个热机吸收的热量: Q1 =
γ =1.4,试求 Cv,m。若该气体的摩尔热容近似为常数,试求在等容条件下加热该气体至 t2=
80℃所需的热。 解:∵ γ =
C p,m Cv , m
=
Cv , m + R Cv , m
= 1.4
∴ Cv, m =
R
γ
=
8.314 = 20.79 J ⋅ K -1 ⋅ mol-1 0.4
Qv = n ⋅ Cv ,m ⋅ ΔT = =
4
3 3 ⎧ ⎧ ⎪V1 = 5dm ⎪V2 = 6dm Q (可 ) = 0 ⎯⎯⎯⎯ → ⎨ ⎨ ⎪T1 = 298.15 K ⎪T2 = 278.15 K ⎩ ⎩
由理想气体绝热可逆过程方程式可知
T2 / T1 = (V1 / V2 ) Cv ,m =
R / Cv , m
运筹学教程(第三版)习题答案(第一章)
b 3/2 1
c x1 0 1 0
d x2 1 0 0
0 x3 5/14
0 x4 -3/4
-2/14 10/35 -5/14d+2/14c 3/14d-10/14c
School of Management
运筹学教程
第一章习题解答
之间时最优解为图中的A点 当c/d在3/10到5/2之间时最优解为图中的 点 ; 当 在 到 之间时最优解为图中的 c/d大于 且c大于等于 时最优解为图中的 点;当c/d 大于5/2且 大于等于 时最优解为图中的B点 大于等于0时最优解为图中的 大于 小于3/10且 d大于 时最优解为图中的 点 ; 当 c/d大于 大于0时最优解为图中的 小于 且 大于 时最优解为图中的C点 大于 5/2且c小于等于 时或当 小于 小于等于0时或当 小于3/10且d小于 时最优解 小于0时最优解 且 小于等于 时或当c/d小于 且 小于 为图中的原点。 为图中的原点。
page 7 14 March 2012
School of Management
运筹学教程
第一章习题解答
对下述线性规划问题找出所有基解, 1.3 对下述线性规划问题找出所有基解,指出哪 些是基可行解,并确定最优解。 些是基可行解,并确定最优解。
max Z = 3 x1 + x 2 + 2 x 3 12 x1 + 3 x 2 + 6 x 3 + 3 x 4 = 9 8 x + x − 4 x + 2 x = 10 1 2 3 5 st 3 x1 − x 6 = 0 x j ≥ 0( j = 1, L , 6) ,
School of Management
《电磁场与电磁波》课后习题解答第一章
n(x2
y2
z2)
(x2 y2 z2)2 (x2 y2 z2)
(n 3)rn
【习题 1.20 解】
1
已知 r (x2 y2 z2 )2
r xex yey zez
所以
(1)
r
(ex
x
ey
y
ez
z
)
(
xex
yey
zez )
ex ey ez
xyz
Bx ex By ey Bz ez
取一线元: dl exdx eydy ezdz
则有
B dl
ex ey ez Bx By Bz 0 dx dy dz
则矢量线所满足的微分方程为
dx dy dz Bx By Bz
或写成
dx dy dz =k(常数) a2 z a3 y a3x a1z a1 y a2x
对(3)(4)分别求和
(4)
d (a1x) d (a2 y) d (a3 z) 0 xdx ydy zdz 0
d (a1x a2 y a3 z) 0 d(x2 y2 z2) 0
所以矢量线方程为
a1x a2 y a3 z k1
x2 y2 z2 k2
【习题 1.6 解】
ex ey ez A B (ex 9ey ez ) (2ex 4ey 3ez ) 1 9 1
2 4 3
31ex 5ey 14ez
【习题 1.3 解】
已知 A ex bey cez , B ex 3ey 8ez ,
(1)要使 A B ,则须散度 A B 0
所以从 A B 1 3b 8c 0 可得: 3b 8c 1
即 12ex 9ey ez • aex bey 12a 9b 0 ⑴
物理初二第一章练习题答案
物理初二第一章练习题答案1. 速度和加速度的关系根据物理学的基本概念,速度是物体运动的一个重要参量,而加速度则表示物体速度变化的快慢。
在初二的物理学习中,我们常常需要研究速度和加速度之间的关系。
以下是第一章练习题的答案:题目1:一个从静止开始的物体以恒定的加速度3 m/s²沿着一条直线运动,求它在5秒后的速度是多少?答案:根据物理学中的加速度公式v = u + at,其中v是末速度,u是初速度,a是加速度,t是时间。
给定初速度u=0,加速度a=3 m/s²,时间t=5秒。
代入公式计算可得v = 0 + 3 × 5 = 15 m/s。
题目2:一辆汽车在道路上以25 m/s的速度匀速行驶,经过10秒后它的位置是多少?答案:根据物理学中的位移公式s = ut,其中s是位移,u是速度,t 是时间。
给定速度u=25 m/s,时间t=10秒。
代入公式计算可得s = 25 ×10 = 250 m。
题目3:一个物体的速度从10 m/s增加到20 m/s,经过2秒的时间,求它的加速度是多少?答案:根据物理学中的加速度公式a = (v - u) / t,其中a是加速度,v是末速度,u是初速度,t是时间。
给定初速度u=10 m/s,末速度v=20 m/s,时间t=2秒。
代入公式计算可得a = (20 - 10) / 2 = 5 m/s²。
2. 动量守恒定律在物理学中,动量守恒定律是一个重要的原理,它指出在一个系统内,所有物体的总动量在没有外力作用的情况下保持不变。
以下是第一章练习题中涉及到动量守恒定律的答案:题目1:一辆质量为1000 kg的小轿车以20 m/s的速度向东行驶,和一辆质量为1500 kg的卡车以15 m/s的速度向东行驶发生碰撞,碰撞后两车结合在一起,求结合后的速度是多少?答案:根据动量守恒定律,碰撞前的总动量等于碰撞后的总动量。
小轿车的动量为mv1,卡车的动量为mv2,碰撞后的总动量为(m1 +m2)v。
《初等数论》各章习题参考解答
《初等数论》各章习题参考解答第一章习题参考解答1.解:因为25的最小倍数是100,9的最小倍数是,所以满足条件的最小正整数11111111100a =。
2.解:3在100!的分解式中的指数()1001001001003100!33113148392781⎡⎤⎡⎤⎡⎤⎡⎤=+++=+++=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦, 在100!的分解式中的指数()1001001001001002100!50251261942481664⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=++++=++++=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦,∴ ()9448474847100!2343123,,61k k k k =⋅⋅=⋅⋅=⋅=。
故 max 47n =,min 3M k =,(),61k =。
故 当M 最小值是3的倍数,但不是2的倍数。
3.解:112121n n n n x x ++++++等价于()()21221n n n x x x ++-+-,从而3x ³(n 就不会太大,存在反向关系)。
由()()22121n nn x x x -+-?+,得()()2212n n n x x -+?,即()()()121122nn x x -+?。
若2n ³,则()()()()251221114242nn x xx x-?+??,导致25140x x -+?,无解。
所以,只有1n =,335314x x x +-?,只能是37,14x +=,从而4,11x =。
综上所述,所求正整数对()()(),4,111,1x n =、。
4.解:按题意,2m n >>,记*,m n k k N =+?;则()222211111n n k nk n k k a a a a a a a a a a a a +++-+-?-+--++-22211111n k k n k k a a a a a a a a a ++?---+?-+-,故 存在无穷多个正整数a 满足2111n k k a a a a ++-+-。
(完整版)自动控制原理_第一章课后习题解答
第一章1.1 图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。
c+-SM___ 1Q浮浮浮浮浮浮2Q浮浮浮浮浮浮浮浮浮浮浮浮fi-+解:系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度*c(通常点位器的上下位移来实现) 。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度*c上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度*c。
系统方框图如图解1. 4.1所示。
1.2恒温箱的温度自动控制系统如图1.19所示。
(1) 画出系统的方框图;(2) 简述保持恒温箱温度恒定的工作原理;(3) 指出该控制系统的被控对象和被控变量分别是什么。
M放大器电机减速器调压器 220~热电偶电阻丝- +- +图1.19 恒温箱的温度自动控制系统解:恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T ,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。
运筹学教程(第三版)习题答案(第一章)
x1 0 0 0 0.75
maxZ 3x1 x2 2x3
12x1 3x2 6x3 3x4 9
(1)
st
8x1 3x1
x2 x6
4x3 0
2x5
10
xj 0( , j 1, ,6)
基可行解
x2
x3
x4
x5
x6
3 0 0 3.5 0
0 1.5 0 8 0
00350
0 0 0 2 2.25
运筹学教程
第一章习题解答
讨论cl.,5d的上值题如(1何)中变,化若,目使标该函问数题变可为行m域ax的Z每=个cx顶1 +点d依x2, 次使目标函数达到最优。
解:得到最终单纯形表如下:
Cj→
c
CB 基 b x1
d x2 3/2 0
c x1 1 1
j
0
d
0
0
x2
x3
x4
1
5/14
-3/4
0
-2/14
X 0是 max Z CX 的最优解,故
CX 0 CX * 0;
X *是 max Z C * X 的最优解,故
C * X * C * X 0 0;
(C * C )( X * X 0 )
C(X 0 X *) C*(X * X 0) 0
page 24 5/25/2020
School of Management
C T X ( 2 ) , 所以 X 也是最优解。
page 23 5/25/2020
School of Management
运筹学教程
第一章习题解答
1.10 线性规划问题max Z=CX,AX=b,X≥0,设 X0为问题的最优解。若目标函数中用C*代替C后,问题 的最优解变为X*,求证
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解:由平面几何知识可知,D 点的运动轨迹为以 OO1 中点 C 为圆心,以 l / 2 为半径的圆弧。 建立如图所示直角坐标系,则 D 点的坐标为:
x=
l cosθ 2 l y = sin θ 2
其中 θ = 2ϕ 。
y
θ
C
x
D 点的速度和加速度为别为: l l & &i + y & j = − θ& sin θ i + θ v=x cos θ j = − lω 0 sin θ i + lω 0 cos θ j 2 2
&τ = Rϕ & τ υ =s
& n & 2 / R)n = Rϕ &&τ + R ϕ a = && sτ + ( s
2
&& = Rϕ & 2 ,则 ϕ && = ϕ & 2 ,积分得 dϕ & /ϕ & = dϕ ,即 由已知条件, Rϕ
& =ϕ +c ln ϕ
由初始条件, t = 0 时 (1)
& 、ϕ && 代入 a ,可得: 把ϕ
u 2 cos ϕ 。 r 2 sin 3 ϕ
a=
u2 r sin 3 ϕ
1-8 一个点沿着半径为 R 的圆周运动,任一瞬时该点的切向加速度大小都与法向加速度大 小相等,初速度为 υ0 。求走完第一圈所需的时间,并求回到出发点瞬时该点的速度大小、 切向加速度大小、法向加速度大小。 解:根据题意,有
2 2
2
1-6 小车 A 与 B 以绳索相连,放置如图。A 车高出 B 车 1.5m。小车 A 以匀速 v A = 0.4 而拉动 B 车,设开始时 BC = l0 = 4.5 m。求 5 秒后小车 B 的速度大小与加速度大小。
m/s 前进
解:在图示坐标系中,O 为原点,小车 B 的水平坐标为 x ,且令 ∠BCO = θ 。
化简后得
cos ( α − β ) =
而 ∠AOB = α − β ,故 ∠AOB = cos −1 ⎜
2ab a + b2
2
⎛ 2ab ⎞ 。 2 2 ⎟ ⎝ a +b ⎠
2 & = h ,其中h为常数,证明点的径向加速度等于 1-10 点在平面内运动(如图),如果有 r θ
ar =
h 2 dp −2 ,其中p为极点到运动轨迹在该点切线的距离。 2 dr
1-1
图示曲线规尺的杆长 OA=AB=200mm, 而 CD=DE=AC=AE=50mm。 如果 OA 绕 O
轴转动的规律是 ϕ = πt / 5 ,初始时 t = 0,求尺上 D 点的运动方程和轨迹。
解:A 点运动已知,欲求 D 点运动,可以从 D 点和 A 点的几何关系出发求解。取图示的坐 标系,以 xi , yi , (i = A, B, C , D, E ) 分别表示各点的 x, y 坐标。
解:如图所示。 M 在直线 BCA 运动,设其运动的位移、速度、加速度分别为 x,υ , a 。
'
x
θ
易知
θ = ωt , ω = υ 0 R , x = R tan θ = R tan (υ0t R )
于是
2 & = 2υ0 & = υ0 sec2 (υ0t R ) , a = υ υ=x R ⋅ sin (υ0t R ) ⋅ sec3 (υ0t R )
得到 D 点的运动方程为
2 2 xD yD + = 1 , 运动轨迹为椭圆的一部分。 2002 1002
1-2 图示 AB 杆长为 l ,绕 B 点按 ϕ = ωt 的规律转动。与杆连接的滑块按 s = a + b sin ωt 的规律沿水平方向作简谐振动,其中 a 、 b 、 ω 为常数,求 A 点的轨迹。
运动轨迹为椭圆。
θ 1-3 半径为 r 的半圆形凸轮以等速 v0 在水平面上滑动,如图所示,求当
速度大小与加速度大小(杆与凸轮的接触点为 M) 。
=30 瞬时顶杆上升的 °
解:取如图所示的坐标系,y 轴沿着顶杆向上,x 轴在水平面上沿着凸轮运动方向。
y
x
由已知条件可得 M 点的坐标为
2 2 x = 0 , y = r 2 − (r − v0 t ) 2 = 2rv0 t − v0 t
解:在 t 时刻,点 A 的在 oxy 坐标中的坐标为
x A = x B + l sin ϕ , y A = l cosϕ 将 x B = s = a + b sin ϕ 代入上式,可得 A 的运动方程为 2 2 ⎛ xA − a ⎞ ⎛ yA ⎞ ⎜ ⎟ +⎜ ⎟ = 1 ⎝ b+l ⎠ ⎝ l ⎠
解:如图所示将速度v沿径向、横向分解为 vr , vϕ 。由图中两个相似三角形的性质得
⎛ vϕ ⎞ ⎛ v ⎞ 2 ⎜ ⎟ =⎜ ⎟ ⎝ p ⎠ ⎝r ⎠
2
v
vr
vϕ
& , v 2 = v 2 + v 2 = r 2θ &2 + r & 2 ,得: 代入 vϕ = rθ ϕ r
p
−2
& 2 r 2r & 2 + r 2θ &2 + h2 r = = h2 r 2h2 && 2 ⎤ ⎡ 2r & −2 = r &⎢ 2 − 3 ⎥ p ⎣h r ⎦
&= 又∵ s
∴& s& =
ρ2
(1)
&2 + y &2 x
&& &+ y && & x x y &2 + y &2 x &2 + y & 2 )3/ 2 (x &&& − yx &&& xy
y
x
解:由 υ sin ϕ = u ,可得:
υ=
u sin ϕ
取如图所示的直角坐标系,则 M 点的坐标为:
x = −r cos ϕ y = r sin ϕ
对 x 、 y 分别对时间求导可得 M 点的速度、加速度分别为:
&i + y & j = rϕ & sin ϕ i + rϕ & cos ϕ j υ=x
⎛ 2ab ⎞ 。 ∠AOB = cos −1 ⎜ 2 2 ⎟ ⎝a +b ⎠
解: A, B 两点用极坐标表示为: A( a, α ), B (b, β) ,则
OA − OB = a cos αi + a sin αj − ( b cos β i + b sin β j ) = ( a cos α − b cos β ) i + ( a sin α − b sin β ) j
(
)
5 秒后, l = l 0 − 5v A ,此时 csc θ =
5 4 , tan θ = ,可得: 3 4 vB = 0.5m / s
a B = 0.045m / s 2
1-7 点 M 沿半径为 r 的圆弧运动,该点的速度 v 在直径 AB 方向上的投影 u 是常数。求点 M 的速度和角φ的关系。
ρ=
&2 + y & 2 )3 / 2 (x 。 && &− y && & x y x
证明:已知 x = x (t ) , y = y (t ) ,则点的速度和加速度分别为
&i + y & j , a = && v=x xi + && yj
sτ + 同时 a = &&
&2 s
ρ
n,
&4 s
&2 + & &2 = & ∴& x y s&2 +
故
& −2 2 r && 2 dp = 2 − 3。 & dr h r & = && − rθ 而 ar = r
2
&& 2 ⎞ & −2 h 2 ⎛ 2r h 2 dp ⎜ 2 − 3 ⎟,因此 a r = ,证毕。 & 2 ⎝h 2 dr r ⎠
若点在平面内运动,其运动方程为 x = x (t ) , y = y (t ) ,证明运动轨迹的曲率半径为
CD = DE = AC = AE 可知: 由 OA = AB , 运动过程中 ACDE 始终为一个平行四边形,
故
xD = xA , y A + yD = 2 yC
∵ OA 绕 O 轴转动,转角为 ϕ =
πt
5 πt πt ∴ x A = OA cos ϕ = 200 cos , y A = OA sin ϕ = 200sin 5 5 πt yC = OC sin ϕ = (OA − AC ) sin ϕ = 150 sin 5 πt πt ∴ xD = x A = 200 cos (mm), yD = 2 yC − y A = 100sin (mm) 5 5
T = ( R / υ 0 )(1 − e −2π )
此时
& = υ 0 e 2π υ = Rϕ
ar = an = (υ 0 2 / R )e 4π
1-9 两质点 A、B 分别沿着两个半径分别为 a、b 的同心圆周运动,这两个质点的速率之比 与 所 在 圆 周 的 半 径 成 反 比 , 求 证 : 若 两 质 点 的 相 对 速 度 与 AB 连 线 平 行r 2 2