人工智能课后习题答案清华大学出版社
人工智能课后习题答案(清华大学出版社)
3
1
8
4
7
6
5
仙1(5)
K(5)
J(7)
2
3
1
8
4
7
6
5
1
2
3
8
4
7
6
5
1
2
3
8
4
7
6
5
F
L(5)
1
2
3
7
8
4
6
5
1
2
3
8
4
7
6
5
2
3
1
8
4
7
6
5
1
2
3
8
4
7
6
5
J(5)
A
I(5)
G(5)此
2
3
1
8
4
7
6
5
1
3
7
8
4
6
5
〔2)(0(釘肯i
九•上A•一
、丄:丿
上d
0丿11丿
第3章
3.18
(1)证明:待归结的命题公式为
(此文档为Word格式,下载后可以任意编辑修改!)
试卷装订封面
学年第学期
课程名称:
课程代码
学生系别
专业
班级
任课教师
阅卷教师
考试方式
开卷□闭卷V
考试日期
考试时间
阅卷日期
装订教师
装订日期
缺卷学生姓名及原因:
无
附:课程考试试卷分析表、期末考核成绩登记表
1.1解图如下:
规则顺序定义如下:
(1) 1->2
人工智能课后习题答案

可采用批量梯度下降、随机梯度下降、小批量梯度下降等优化算法,以及动量 法、AdaGrad、RMSProp、Adam等自适应学习率优化方法。
课后习题解答与讨论
• 习题一解答:详细阐述感知器模型的原理及算法实现过程,包括模型结构、激 活函数选择、损失函数定义、权重和偏置项更新方法等。
• 习题二解答:分析多层前馈神经网络的结构特点,讨论隐藏层数量、神经元个 数等超参数对网络性能的影响,并给出一种合适的超参数选择方法。
发展历程
人工智能的发展大致经历了符号主义、连接主义和深度学习三个阶段。符号主义认为人工智能源于对人类思 维的研究,尤其是对语言和逻辑的研究;连接主义主张通过训练大量神经元之间的连接关系来模拟人脑的思 维;深度学习则通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。
机器学习原理及分类
深度学习框架与应用领域
深度学习框架
深度学习框架是一种用于构建、训练和部署深度学习模型的开发工具。目前流行的深度学习框架包括 TensorFlow、PyTorch、Keras等。
应用领域
深度学习已广泛应用于图像识别、语音识别、自然语言处理、推荐系统等多个领域,并取得了显著的 成果。
课后习题解答与讨论
习题四解答
讨论人工智能的伦理问题,如数据隐私、算法偏见等,并 提出可能的解决方案。
02 感知器与神经网络
感知器模型及算法实现
感知器模型
感知器是一种简单的二分类线性模型 ,由输入层、权重和偏置项、激活函 数(通常为阶跃函数)以及输出层组 成。
感知器算法实现
通过训练数据集,采用梯度下降法更 新权重和偏置项,使得感知器对训练 样本的分类误差最小化。
时序差分方法
人工智能基础课后习题答案
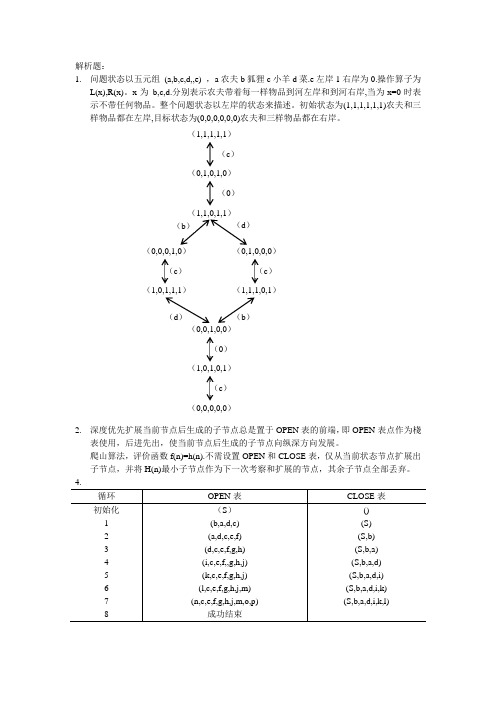
解析题:1. 问题状态以五元组 (a,b,c,d,,e) ,a 农夫b 狐狸c 小羊d 菜.e 左岸1右岸为0.操作算子为L(x),R(x)。
x 为 b,c,d.分别表示农夫带着每一样物品到河左岸和到河右岸,当为x=0时表示不带任何物品。
整个问题状态以左岸的状态来描述。
初始状态为(1,1,1,1,1,1)农夫和三样物品都在左岸,目标状态为(0,0,0,0,0,0)农夫和三样物品都在右岸。
2. 深度优先扩展当前节点后生成的子节点总是置于OPEN 表的前端,即OPEN 表点作为棧表使用,后进先出,使当前节点后生成的子节点向纵深方向发展。
爬山算法,评价函数f(n)=h(n).不需设置OPEN 和CLOSE 表,仅从当前状态节点扩展出子节点,并将H(n)最小子节点作为下一次考察和扩展的节点,其余子节点全部丢弃。
(b ) (d ) (1,1,1,1,1)(0,1,0,1,0)(1,1,0,1,1) (0,0,0,1,0)(c )(0)(0,1,0,0,0)(b )(d ) (1,0,1,1,1)(c ) (1,1,1,0,1)(c ) (0,0,1,0,0)(1,0,1,0,1)(0,0,0,0,0)(0) (c )a(5) 1,2,38,4,07,6,5⎛⎫⎪ ⎪ ⎪⎝⎭S(4) 1,2,38,0,47,6,5⎛⎫ ⎪ ⎪ ⎪⎝⎭c(6) 1,2,30,8,47,6,5⎛⎫⎪ ⎪ ⎪⎝⎭d(5) 1,0,38,2,47,6,5⎛⎫⎪ ⎪ ⎪⎝⎭e(6) 1,2,38,6,40,7,5⎛⎫⎪ ⎪ ⎪⎝⎭f(6) 1,2,38,6,47,5,0⎛⎫⎪ ⎪ ⎪⎝⎭b(4) 1,2,38,6,47,0,5⎛⎫⎪ ⎪ ⎪⎝⎭g(6) 1,2,08,4,37,6,5⎛⎫⎪ ⎪ ⎪⎝⎭h(7) 1,2,38,4,57,6,0⎛⎫⎪ ⎪ ⎪⎝⎭i(7) 0,1,38,2,47,6,5⎛⎫⎪ ⎪ ⎪⎝⎭j(5) 1,3,08,2,47,6,5⎛⎫⎪ ⎪ ⎪⎝⎭k(5) 1,3,48,2,07,6,5⎛⎫⎪ ⎪ ⎪⎝⎭l(5) 1,3,48,0,27,6,5⎛⎫⎪ ⎪ ⎪⎝⎭m(7) 1,3,48,2,57,6,0⎛⎫⎪ ⎪ ⎪⎝⎭n(5) 1,3,48,6,27,0,5⎛⎫⎪ ⎪ ⎪⎝⎭o(7) 1,0,48,3,27,6,5⎛⎫⎪ ⎪ ⎪⎝⎭p(7) 1,3,40,8,27,6,5⎛⎫⎪ ⎪ ⎪⎝⎭。
人工智能_(马少平_朱小燕_著)_清华大学出版社_课后答案_-_完整版(习题部分+答案部分)
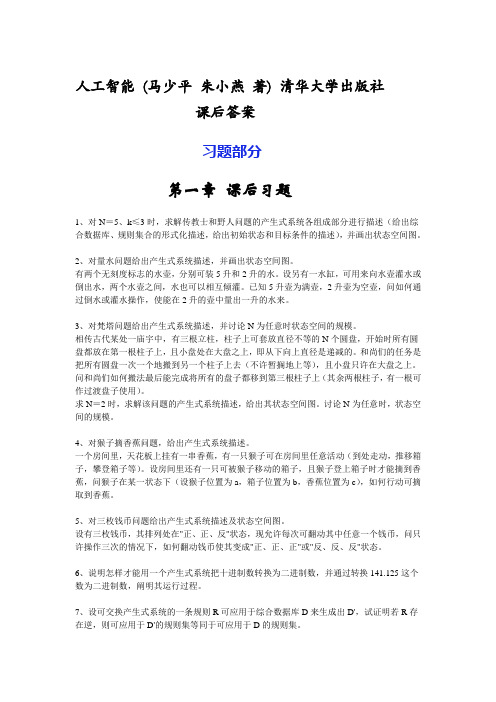
人工智能(马少平朱小燕著) 清华大学出版社课后答案习题部分第一章课后习题1、对N=5、k≤3时,求解传教士和野人问题的产生式系统各组成部分进行描述(给出综合数据库、规则集合的形式化描述,给出初始状态和目标条件的描述),并画出状态空间图。
2、对量水问题给出产生式系统描述,并画出状态空间图。
有两个无刻度标志的水壶,分别可装5升和2升的水。
设另有一水缸,可用来向水壶灌水或倒出水,两个水壶之间,水也可以相互倾灌。
已知5升壶为满壶,2升壶为空壶,问如何通过倒水或灌水操作,使能在2升的壶中量出一升的水来。
3、对梵塔问题给出产生式系统描述,并讨论N为任意时状态空间的规模。
相传古代某处一庙宇中,有三根立柱,柱子上可套放直径不等的N个圆盘,开始时所有圆盘都放在第一根柱子上,且小盘处在大盘之上,即从下向上直径是递减的。
和尚们的任务是把所有圆盘一次一个地搬到另一个柱子上去(不许暂搁地上等),且小盘只许在大盘之上。
问和尚们如何搬法最后能完成将所有的盘子都移到第三根柱子上(其余两根柱子,有一根可作过渡盘子使用)。
求N=2时,求解该问题的产生式系统描述,给出其状态空间图。
讨论N为任意时,状态空间的规模。
4、对猴子摘香蕉问题,给出产生式系统描述。
一个房间里,天花板上挂有一串香蕉,有一只猴子可在房间里任意活动(到处走动,推移箱子,攀登箱子等)。
设房间里还有一只可被猴子移动的箱子,且猴子登上箱子时才能摘到香蕉,问猴子在某一状态下(设猴子位置为a,箱子位置为b,香蕉位置为c),如何行动可摘取到香蕉。
5、对三枚钱币问题给出产生式系统描述及状态空间图。
设有三枚钱币,其排列处在"正、正、反"状态,现允许每次可翻动其中任意一个钱币,问只许操作三次的情况下,如何翻动钱币使其变成"正、正、正"或"反、反、反"状态。
6、说明怎样才能用一个产生式系统把十进制数转换为二进制数,并通过转换141.125这个数为二进制数,阐明其运行过程。
人工智能课后答案

人工智能课后答案第一章课后习题1、对N=5、k≤3时,求解传教士和野人问题的产生式系统各组成部分进行描述(给出综合数据库、规则集合的形式化描述,给出初始状态和目标条件的描述),并画出状态空间图。
2、对量水问题给出产生式系统描述,并画出状态空间图。
有两个无刻度标志的水壶,分别可装5升和2升的水。
设另有一水缸,可用来向水壶灌水或倒出水,两个水壶之间,水也可以相互倾灌。
已知5升壶为满壶,2升壶为空壶,问如何通过倒水或灌水操作,使能在2升的壶中量出一升的水来。
3、对梵塔问题给出产生式系统描述,并讨论N为任意时状态空间的规模。
相传古代某处一庙宇中,有三根立柱,柱子上可套放直径不等的N个圆盘,开始时所有圆盘都放在第一根柱子上,且小盘处在大盘之上,即从下向上直径是递减的。
和尚们的任务是把所有圆盘一次一个地搬到另一个柱子上去(不许暂搁地上等),且小盘只许在大盘之上。
问和尚们如何搬法最后能完成将所有的盘子都移到第三根柱子上(其余两根柱子,有一根可作过渡盘子使用)。
求N=2时,求解该问题的产生式系统描述,给出其状态空间图。
讨论N为任意时,状态空间的规模。
4、对猴子摘香蕉问题,给出产生式系统描述。
一个房间里,天花板上挂有一串香蕉,有一只猴子可在房间里任意活动(到处走动,推移箱子,攀登箱子等)。
设房间里还有一只可被猴子移动的箱子,且猴子登上箱子时才能摘到香蕉,问猴子在某一状态下(设猴子位置为a,箱子位置为b,香蕉位置为c),如何行动可摘取到香蕉。
5、对三枚钱币问题给出产生式系统描述及状态空间图。
设有三枚钱币,其排列处在"正、正、反"状态,现允许每次可翻动其中任意一个钱币,问只许操作三次的情况下,如何翻动钱币使其变成"正、正、正"或"反、反、反"状态。
6、说明怎样才能用一个产生式系统把十进制数转换为二进制数,并通过转换141.125这个数为二进制数,阐明其运行过程。
(完整版)人工智能课后习题
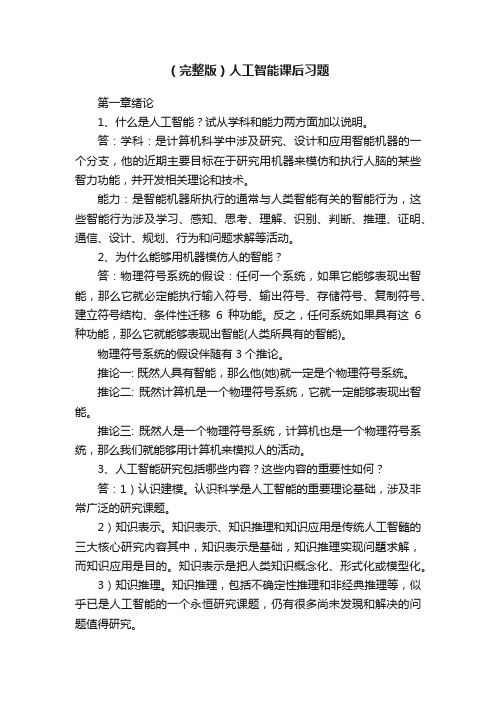
(完整版)人工智能课后习题第一章绪论1、什么是人工智能?试从学科和能力两方面加以说明。
答:学科:是计算机科学中涉及研究、设计和应用智能机器的一个分支,他的近期主要目标在于研究用机器来模仿和执行人脑的某些智力功能,并开发相关理论和技术。
能力:是智能机器所执行的通常与人类智能有关的智能行为,这些智能行为涉及学习、感知、思考、理解、识别、判断、推理、证明、通信、设计、规划、行为和问题求解等活动。
2、为什么能够用机器模仿人的智能?答:物理符号系统的假设:任何一个系统,如果它能够表现出智能,那么它就必定能执行输入符号、输出符号、存储符号、复制符号、建立符号结构、条件性迁移6种功能。
反之,任何系统如果具有这6种功能,那么它就能够表现出智能(人类所具有的智能)。
物理符号系统的假设伴随有3个推论。
推论一: 既然人具有智能,那么他(她)就一定是个物理符号系统。
推论二: 既然计算机是一个物理符号系统,它就一定能够表现出智能。
推论三: 既然人是一个物理符号系统,计算机也是一个物理符号系统,那么我们就能够用计算机来模拟人的活动。
3、人工智能研究包括哪些内容?这些内容的重要性如何?答:1)认识建模。
认识科学是人工智能的重要理论基础,涉及非常广泛的研究课题。
2)知识表示。
知识表示、知识推理和知识应用是传统人工智髓的三大核心研究内容其中,知识表示是基础,知识推理实现问題求解,而知识应用是目的。
知识表示是把人类知识概念化、形式化或模型化。
3)知识推理。
知识推理,包括不确定性推理和非经典推理等,似乎已是人工智能的一个永恒研究课题,仍有很多尚未发現和解决的问题值得研究。
4)知识应用。
人工智能能否获得广泛应用是衡量其生命力和检验其生存力的重要标志。
5)机器感知。
机器感知是机器获吹外部信息的基本途径。
6)机器思维。
机器思维是对传感信息和机器内部的工作信息进行有目的的处理。
7)机器学习。
机器学习是继专家系统之后人工智能应用的又一重要研究领域,也是人工智能和神经计算的核心研究课題。
人工智能课后习题第2章 参考答案
第2章知识表示方法参考答案2.8设有如下语句,请用相应的谓词公式分别把他们表示出来:(1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。
解:定义谓词P(x):x是人L(x,y):x喜欢y其中,y的个体域是{梅花,菊花}。
将知识用谓词表示为:(∃x )(P(x)→L(x, 梅花)∨L(x, 菊花)∨L(x, 梅花)∧L(x, 菊花))(2) 有人每天下午都去打篮球。
解:定义谓词P(x):x是人B(x):x打篮球A(y):y是下午将知识用谓词表示为:(∃x )(∀y) (A(y)→B(x)∧P(x))(3)新型计算机速度又快,存储容量又大。
解:定义谓词NC(x):x是新型计算机F(x):x速度快B(x):x容量大将知识用谓词表示为:(∀x) (NC(x)→F(x)∧B(x))(4) 不是每个计算机系的学生都喜欢在计算机上编程序。
解:定义谓词S(x):x是计算机系学生L(x, pragramming):x喜欢编程序U(x,computer):x使用计算机将知识用谓词表示为:¬(∀x) (S(x)→L(x, pragramming)∧U(x,computer))(5)凡是喜欢编程序的人都喜欢计算机。
解:定义谓词P(x):x是人L(x, y):x喜欢y将知识用谓词表示为:(∀x) (P(x)∧L(x,pragramming)→L(x, computer))2.9用谓词表示法求解机器人摞积木问题。
设机器人有一只机械手,要处理的世界有一张桌子,桌上可堆放若干相同的方积木块。
机械手有4个操作积木的典型动作:从桌上拣起一块积木;将手中的积木放到桌之上;在积木上再摞上一块积木;从积木上面拣起一块积木。
积木世界的布局如下图所示。
图机器人摞积木问题解:(1) 先定义描述状态的谓词CLEAR(x):积木x上面是空的。
ON(x, y):积木x在积木y的上面。
ONTABLE(x):积木x在桌子上。
HOLDING(x):机械手抓住x。
人工智能课后习题第2章 参考答案
第2章知识表示方法参考答案2.8设有如下语句,请用相应的谓词公式分别把他们表示出来:(1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。
解:定义谓词P(x):x是人L(x,y):x喜欢y其中,y的个体域是{梅花,菊花}。
将知识用谓词表示为:(∃x )(P(x)→L(x, 梅花)∨L(x, 菊花)∨L(x, 梅花)∧L(x, 菊花))(2) 有人每天下午都去打篮球。
解:定义谓词P(x):x是人B(x):x打篮球A(y):y是下午将知识用谓词表示为:(∃x )(∀y) (A(y)→B(x)∧P(x))(3)新型计算机速度又快,存储容量又大。
解:定义谓词NC(x):x是新型计算机F(x):x速度快B(x):x容量大将知识用谓词表示为:(∀x) (NC(x)→F(x)∧B(x))(4) 不是每个计算机系的学生都喜欢在计算机上编程序。
解:定义谓词S(x):x是计算机系学生L(x, pragramming):x喜欢编程序U(x,computer):x使用计算机将知识用谓词表示为:¬(∀x) (S(x)→L(x, pragramming)∧U(x,computer))(5)凡是喜欢编程序的人都喜欢计算机。
解:定义谓词P(x):x是人L(x, y):x喜欢y将知识用谓词表示为:(∀x) (P(x)∧L(x,pragramming)→L(x, computer))2.9用谓词表示法求解机器人摞积木问题。
设机器人有一只机械手,要处理的世界有一张桌子,桌上可堆放若干相同的方积木块。
机械手有4个操作积木的典型动作:从桌上拣起一块积木;将手中的积木放到桌之上;在积木上再摞上一块积木;从积木上面拣起一块积木。
积木世界的布局如下图所示。
图机器人摞积木问题解:(1) 先定义描述状态的谓词CLEAR(x):积木x上面是空的。
ON(x, y):积木x在积木y的上面。
ONTABLE(x):积木x在桌子上。
HOLDING(x):机械手抓住x。
人工智能课后习题答案2
84页1-6答案1。
何为状态图和与或图?图搜索与问题求解有什么关系?状态图是描述寻找目标或路径问题的有向图,即描述一个实体基于事件反应的动态行为,显示了该实体如何根据当前所处的状态对不同的时间做出反应的。
与或图是一种系统地将问题分解为互相独立的小问题,然后分而解决的方法。
与或图中有两种代表性的节点:“与节点”和“或节点”,“与节点”指所有的后续节点都有解时它才有解;“或节点”指各个后续节点均完全独立,只要其中有一个有解它就有解。
关系:问题求解就是在一个图中寻找一个从初始节点到目标节点的路径问题,图搜索模拟的实际是人脑分析问题,解决问题的过程,它基于领域知识的问题求解过程。
第3章作业题参考答案2.综述图搜索的方式和策略。
答:用计算机来实现图的搜索,有两种最基本的方式:树式搜索和线式搜索。
树式搜索就是在搜索过程中记录所经过的所有节点和边。
线式搜索就是在搜索过程中只记录那些当前认为是处在所找路径上的节点和边。
线式搜索的基本方式又可分为不回溯和可回溯的的两种。
图搜索的策略可分为:盲目搜索和启发式搜索。
盲目搜索就是无向导的搜索。
树式盲目搜索就是穷举式搜索。
而线式盲目搜索,对于不回溯的就是随机碰撞式搜索,对于回溯的则也是穷举式搜索。
启发式搜索则是利用“启发性信息”引导的搜索。
启发式搜索又可分为许多不同的策略,如全局择优、局部择优、最佳图搜索等。
1、何为状态图和与或图?图搜索与问题求解有什么关系?解:按连接同一节点的各边间的逻辑关系划分,图可以分为状态图和与或图两大类。
其中状态图是描述问题的有向图。
在状态图中寻找目标或路径的基本方法就是搜索。
2、综述图搜索的方式和策略。
解:图搜索的方式有:树式搜索,线式搜索。
其策略是:盲目搜索,对树式和不回溯的线式是穷举方式,对回溯的线式是随机碰撞式。
启发式搜索,利用“启发性信息”引导的搜索。
3、什么是问题的解?什么是最优解?解:能够解决问题的方法或具体做法成为这个问题的解。
(完整word版)人工智能课后习题答案(清华大学出版社)
第1章 1.1 解图如下:(1) 1->2(2) 1->3(3) 2->3(6) 3->2(5) 3->1(4) 2->1 8数码问题 启发函数为不在位的将牌数启发函数为不在位的将牌数距离和S(4)S(5)第2章 2.1 解图:第3章 3.18(1)证明:待归结的命题公式为()P Q P ∧→,合取范式为:P Q P ∧∧,求取子句集为{,,}S P Q P =,对子句集中的子句进行归结可得:① P ② Q③P ④ ①③归结 由上可得原公式成立。
(2)证明:待归结的命题公式为())(()())P Q R P Q P R →→∧→→→(,合取范式为:()()P Q R P Q P R ∨∨∧∨∧∧,求取子句集为{,,,}S P Q R P Q P R =∨∨∨,对子句集中的子句进行归结可得:① P Q R ∨∨ ② P Q ∨③ P ④R ⑤ Q②③归结⑥ P R ∨ ①④归结⑦ R ③⑥归结 ⑧ ④⑦归结 由上可得原公式成立。
(3)证明:待归结的命题公式为()(())Q P Q P Q →∧→→,合取范式为:()()Q P Q P Q ∨∧∨∧,求取子句集为{,,}S Q P Q P Q =∨∨,对子句集中的子句进行归结可得:① Q P ∨ ② Q③ Q P ∨④ P ①②归结 ⑤ P ②③归结 ⑥ ④⑤归结 由上可得原公式成立。
3.19 答案(1) {/,/,/}mgu a x b y b z = (2) {(())/,()/}mgu g f v x f v u = (3) 不可合一(4) {/,/,/}=mgu b x b y b z3.23 证明R1:所有不贫穷且聪明的人都快乐:(()()())∀∧→x Poor x Smart x Happy x R2:那些看书的人是聪明的:(()())∀→x read x Smart xR3:李明能看书且不贫穷:()()∧read Li Poor LiR4:快乐的人过着激动人心的生活:(()())∀→x Happy x Exciting x 结论李明过着激动人心的生活的否定:()Exciting Li将上述谓词公式转化为子句集并进行归结如下:由R1可得子句:①()()()Poor x Smart x Happy x∨∨由R2可得子句:②()()read y Smart y∨由R3可得子句:③()read Li④()Poor Li由R4可得子句:⑤()()∨Happy z Exciting z有结论的否定可得子句:⑥()Exciting Li根据以上6条子句,归结如下:⑦()Happy Li⑤⑥Li/z⑧()()∨⑦①Li/xPoor Li Smart Li⑨()Smart Li⑧④⑩()read Li⑨②Li/y⑩③⑪第4章4.9 答案4.11 答案第5章 5.9 答案 解:把该网络看成两个部分,首先求取(1|12)P T S S ∧。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章
1.1 解图如下: 8数码问题
启发函数为不在位的将牌数
启发函数为不在位的将牌数距离和
第2章
2.1 解图:
第3章
3.18
(1)证明:待归结的命题公式为()P Q P ∧
→,合取范式为:P Q P ∧∧,求取子句集为
{,,}S P Q P =,对子句集中的子句进行归结可得:
①
①③归结
由上可得原公式成立。
(2)证明:待归结的命题公式为())(()())P Q R P Q P R →→∧
→→→(,合取范式为:
()()P Q R P Q P R ∨∨∧∨∧∧
,求取子句集为{,,,}S P Q R P Q P R =∨
∨∨,对子句集中
的子句进行归结可得:
① Q
②③归结 ② P R ∨
①④归结 ③ R
③⑥归结
④
④⑦归结
由上可得原公式成立。
(3)证明:待归结的命题公式为()(())Q P Q P Q →∧
→→,合取范式为:
()()Q P Q P Q ∨
∧∨∧,求取子句集为{,,}S Q P Q P Q =∨
∨,对子句集中的子句进行归结可
得:
① P
①②归结 ② P
②③归结
③
④⑤归结
由上可得原公式成立。
3.19 答案
(1) {/,/,/}mgu a x b y b z = (2) {(())/,()/}mgu g f v x f v u = (3) 不可合一
(4) {/,/,/}mgu b x b y b z = 3.23 证明 R1:所有不贫穷且聪明的人都快乐:(()()())x Poor x Smart x Happy x ∀∧→ R2:那些看书的人是聪明的:(()())x read x Smart x ∀→ R3:李明能看书且不贫穷:()()read Li Poor Li ∧ R4:快乐的人过着激动人心的生活:(()())x Happy x Exciting x ∀→ 结论李明过着激动人心的生活的否定:()Exciting Li
将上述谓词公式转化为子句集并进行归结如下:
由R1可得子句: 由R2可得子句: 由R3可得子句:
由R4可得子句: 有结论的否定可得子句: 根据以上6条子句,归结如下: ① ()Happy Li ⑤⑥ Li /z ② ()()Poor Li Smart Li ∨
⑦① Li /x ③ ()Smart Li ⑧④ ④ ()read Li
⑨② Li /y ⑤
⑩③
由上可得原命题成立。
第4章
4.9 答案
4.11
答案 第5章 5.9 答案
解:把该网络看成两个部分,首先求取(1|12)P T S S ∧。
1. 首先求取(1|1)P T S ,因为(1|1)0.7(1)0.2P S F P F =>=,所以
假设(1|1)1P S F =,(1|1)(1)20.1
0.1818(1)(1)1(21)0.11
P T F LS P T LS P T =
⨯⨯==-⨯+-⨯+
2. 然后求取(1|2)P T S ,因为(2|2)0.6(2)0.4P S F P F =>=,所以
假设(2|2)1P S F =,(1|2)(1)1000.1
0.9174(1)(1)1(1001)0.11
P T F LS P T LS P T =⨯⨯==-⨯+-⨯+
3. 求取(1|1)O T S 和(1|2)O T S 4. 求取(1|12)P T S S ∧
5. 求取(|12)P H S S ∧,因为(1|12)0.4874(1)0.1P T S S P T ∧=>=,所以
假设(1|12)1P T S S ∧=,()650.01(|1)0.3963(1)()1
(651)0.011
LS P H P H T LS P H ⨯⨯=
=
=-⨯+-⨯+
6. 求取(|3)P H S ,因为(|2)0.0001()0.01P H T P H =<=,所以
假设(2|3)0P T S =,则 7. 求(|12)O H S S ∧和(|3)O H S 8. 求(|123)P H S S S ∧∧ 5.10 答案 解:。