工程机械的转向理论154页PPT
合集下载
学习任务机械转向系PPT课件
2
.
项目11.1 汽车转向系统概述
{情境导入}
转向系统是驾驶员操纵汽车行驶方向的枢纽,其性 能好坏,直接关系到汽车操纵性能和安全运行。在汽车的 使用中容易遇到转向系统故障,若不及时检修,就有可能 机械失灵甚至导致交通事故的发生。因此微型轿车(如普 桑、夏利、奥拓等车型)在使用中要注意维护,发现故障 及时诊治,消除不安全隐患,确保安全运行。汽车转向过 程中,内外侧转向车轮的偏转角是否相同?关系如何?如 何保证这一关系?转向盘操纵的轻便性及转向操纵灵敏性 如何兼顾?
较大角度车子才真正开始转向,车辆转向明显滞后。
故障原因分析 汽车出现转向不灵敏的最常见原因是方向盘自由行程过
大。故本故障的诊断重点是方向盘自由行程的检查和转向 操纵机构的零件是否过度磨损、松动或损坏。
8
.
{理论引导} 转向操纵机构的 主要作用是将驾 驶员转动转向盘 的操纵力传给转 向器。
图11-3 东风EQ10自由行程及对汽车转向的影响
由于转向系各机件之间都会有一定的装配间隙, 这些间隙还会随着机件的磨损而增大。所以在汽 车转弯转动转向盘时,必须消除这些间隙并克服 机件的弹性变形后,车轮才开始偏转,即转向盘 有一空转过程。转向盘为消除间隙、克服弹性变 形所转过的角度称为转向盘自由行程。
18
.
可逆式转向器是指正、逆传动效率都很高的转向器。 正传动效率高使汽车转向操纵轻便;逆传动效率高有利于 汽车转向后转向轮的自动回正,转向盘“路感”强,但也 容易将坏路面对车轮的冲击力传到转向盘,出现“打手” 现象。经常在良好路面上行驶的汽车多使用可逆式转向器。
14
.
伸缩调整机构 可让转向盘 上下调整, 以适合驾驶 姿势。
图11-7 伸缩式 转向柱
转向系幻灯片

转向直拉杆是转向摇臂与转向节臂的传动杆件,具有传 力和缓冲作用。在转向轮偏转且因 悬架弹性变形而相 对车架跳动时,转向直拉杆与转向摇臂及转向节臂的相 对运动都是空间运动,三者之间连接件都是球形铰链。
2020/6/16
30
2020/6/16
31
四、转向传动机构
作用:使两个车轮同步转动。 转向横拉杆是转向梯形的底边,由横拉杆体和旋转在两 端的横拉杆接头组成。
2020/6/16
10
2
11
三、转向操纵机构
定义:转向盘到转向器之间的所有零部件总称为转 向操纵机构
功用:转向操纵机构的功用是将驾驶员转动转向盘 的操纵力矩传给转向器。
2020/6/16
12
2020/6/16
13
三、转向操纵机构
1、转向盘
组成:
它主要由轮圈、轮毂、轮辐(2~4根)组成。
为了司机有很好的视野, 方向盘上部的空一般较大。
2020/6/16
8
机械式转向器
2020/6/16
9
工作原理:
转向齿轮通过轴承支承在壳体内,转向齿轮的一端与转向轴连接, 将驾驶员的转向操纵力输入,另一端与转向齿条直接啮合,形成一 对传动副,并通过转向齿条传动,带动横拉杆,使转向节转动。 优点:由于齿轮齿条式转向器属于可逆式转向器,其正效率与逆效 率都很高,自动回正能力强。齿轮齿条式转向器结构简单、加工方 便、工作可靠、使用寿命长、不需要调整齿轮齿条的间隙,因而得 到了广泛的应用。
2
1
概述
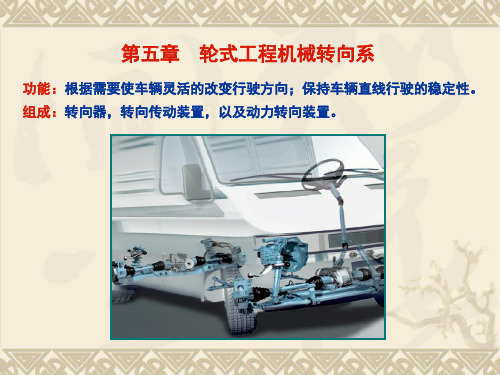
一、 转向装置的功用
转向装置可改变汽车的行驶方向和保持汽车直线 行驶稳定。
2020/6/16
2
概述
转向系统分为机械转向系统和动力转向系统 机械转向装置以司机体力为转向能源,所有传力件都是机械的。它由转向 操纵机构、转向器和转向传动机构三部分组成,
2020/6/16
30
2020/6/16
31
四、转向传动机构
作用:使两个车轮同步转动。 转向横拉杆是转向梯形的底边,由横拉杆体和旋转在两 端的横拉杆接头组成。
2020/6/16
10
2
11
三、转向操纵机构
定义:转向盘到转向器之间的所有零部件总称为转 向操纵机构
功用:转向操纵机构的功用是将驾驶员转动转向盘 的操纵力矩传给转向器。
2020/6/16
12
2020/6/16
13
三、转向操纵机构
1、转向盘
组成:
它主要由轮圈、轮毂、轮辐(2~4根)组成。
为了司机有很好的视野, 方向盘上部的空一般较大。
2020/6/16
8
机械式转向器
2020/6/16
9
工作原理:
转向齿轮通过轴承支承在壳体内,转向齿轮的一端与转向轴连接, 将驾驶员的转向操纵力输入,另一端与转向齿条直接啮合,形成一 对传动副,并通过转向齿条传动,带动横拉杆,使转向节转动。 优点:由于齿轮齿条式转向器属于可逆式转向器,其正效率与逆效 率都很高,自动回正能力强。齿轮齿条式转向器结构简单、加工方 便、工作可靠、使用寿命长、不需要调整齿轮齿条的间隙,因而得 到了广泛的应用。
2
1
概述
一、 转向装置的功用
转向装置可改变汽车的行驶方向和保持汽车直线 行驶稳定。
2020/6/16
2
概述
转向系统分为机械转向系统和动力转向系统 机械转向装置以司机体力为转向能源,所有传力件都是机械的。它由转向 操纵机构、转向器和转向传动机构三部分组成,
工程机械转向理论PPT课件

第七章工程机械转向理论
§7-1概述 §7-2轮式车辆的转向理论 §7-3履带车辆的转向理论
§7-1概述
一、偏转车轮转向及偏转履带转向 二、铰接车架转向方式 三、差速(滑移)转向
一、偏转车轮转向及偏转履带转向
(1)前轮偏转 (2)后轮偏转 (3)前后轮同时偏转的转向方式 (4)多桥偏转车轮转向方式 (5)偏转履带的转向方式
(一)铰接式轮式车辆转向的运动学
参看图7-11
四个车轮的线速度
vω1
L
r r cosγ sinγ
B 2
ω 0
vω1
L
r r cosγ sinγ
B 2
ω 0
vω' 1
(L
r) cosγ sinγ
r
B 2
ω
0
vω' 2
§7-2轮式车辆的转向理论
一、偏转车轮转向车辆的转向理论 二、铰接式轮式车辆的转向理论
一、偏转车轮转向车辆的转向理论
(一)偏转车轮转向车辆的转向运动学 (二)偏转车轮转向车辆的转向动力学 (三)单差速器对轮式车辆性能的影响
(一)偏转车轮转向车辆的转向运 动学
参看图7-1
(3)稳定转向时发动机的载荷比
参图7-31
(4)双差速器传动的功率循环
参看图7-32
寄生功率
当υ>0.5时,慢速侧半轴所得到的一部分功率不 是从差速器壳处传来的,而是由机体通过慢速侧 履带传到慢速侧半轴上的。慢速侧半轴同时又将 这部分功率通过差速器传给快速侧半轴。因此, 在这种情况下,这一部分功率就按以下次序不断 地进行循环:快速侧半轴→机体→慢速侧半轴→ 差速器→快速侧半轴。这种现象就称为功率循环。 被循环的这部分功率叫做寄生功率。
§7-1概述 §7-2轮式车辆的转向理论 §7-3履带车辆的转向理论
§7-1概述
一、偏转车轮转向及偏转履带转向 二、铰接车架转向方式 三、差速(滑移)转向
一、偏转车轮转向及偏转履带转向
(1)前轮偏转 (2)后轮偏转 (3)前后轮同时偏转的转向方式 (4)多桥偏转车轮转向方式 (5)偏转履带的转向方式
(一)铰接式轮式车辆转向的运动学
参看图7-11
四个车轮的线速度
vω1
L
r r cosγ sinγ
B 2
ω 0
vω1
L
r r cosγ sinγ
B 2
ω 0
vω' 1
(L
r) cosγ sinγ
r
B 2
ω
0
vω' 2
§7-2轮式车辆的转向理论
一、偏转车轮转向车辆的转向理论 二、铰接式轮式车辆的转向理论
一、偏转车轮转向车辆的转向理论
(一)偏转车轮转向车辆的转向运动学 (二)偏转车轮转向车辆的转向动力学 (三)单差速器对轮式车辆性能的影响
(一)偏转车轮转向车辆的转向运 动学
参看图7-1
(3)稳定转向时发动机的载荷比
参图7-31
(4)双差速器传动的功率循环
参看图7-32
寄生功率
当υ>0.5时,慢速侧半轴所得到的一部分功率不 是从差速器壳处传来的,而是由机体通过慢速侧 履带传到慢速侧半轴上的。慢速侧半轴同时又将 这部分功率通过差速器传给快速侧半轴。因此, 在这种情况下,这一部分功率就按以下次序不断 地进行循环:快速侧半轴→机体→慢速侧半轴→ 差速器→快速侧半轴。这种现象就称为功率循环。 被循环的这部分功率叫做寄生功率。
工程机械底盘理论课件--工程机械转向理论

第四节 本章重点
第一节 概 述
根据工程车辆获得转向力矩方式的不同工程车辆的转向可分为 下面三类: 一、偏转车轮转向及偏转履带转向
(1)前轮偏转:即改变车辆前轮与机体的相对位置,前外轮 的变道行驶半径最大。驾驶员易于用前外轮是否避过来估计整机 的行驶路线。
第一节 概 述
(2)后轮偏转:车辆前方装有工作装置,若采用前轮偏转方 式,不仅车轮的偏转角将受工作装置的限制,并由于工作装置靠 近前轮,其工作轮压较大,可能要求采用双胎或增大轮胎直径使 轮距及外形尺寸加大,机动性降低,还将使转向阻力矩增加,采 用后轮偏转方式,可以解决上述矛盾。
第二节 轮式车辆的转向理论
轮式车辆在转向或直线行驶过程中,经常要求左右轮以不 同的角速度旋转,其理由是:
1、转向时,外侧车轮所走过的路程较内侧车轮长; 2、当左、右车轮轮胎、载荷、气压不等或磨损不均时,其 实际滚动半径不相等; 3、在高低不平的道路上行驶时,两侧车轮实际走过的路程 不同。
第二节 轮式车辆的转向理论
第二节 轮式车辆的转向理论
1.转向行驶受力分析 在了解轮式车辆转向受力情况以前,先来讨论一下两轮车
转向时的受力情况。假定两轮车在水平地段上以等角速度ωz作低 速稳定转向,略去离心力不计,这时受力情况如图7-3d)所示。
图7-3 两轮车转向时的受力简图
第二节 轮式车辆的转向理论
图7-4 轮式车辆转向时受力简图
第二节 轮式车辆的转向理论
3.转向时,两侧从动轮应能以不同的角速度旋转,以避 免转向时从动轮产生纵向滑移或滑转。这个条件比较容易满 足,因为从动轮是不驱动的,能在轴上自由旋转。
(二)偏转车轮转向车辆的转向动力学
偏转车轮转向的车辆无论是偏转前轮,偏转后轮,还是前后 轮同时偏转,其转向力矩最终是由导向轮与地面相互作用产生 的。其分析方法基本相同,下面我们仅对偏转前轮转向的车辆 在转向时的受力进行分析讨论。
第一节 概 述
根据工程车辆获得转向力矩方式的不同工程车辆的转向可分为 下面三类: 一、偏转车轮转向及偏转履带转向
(1)前轮偏转:即改变车辆前轮与机体的相对位置,前外轮 的变道行驶半径最大。驾驶员易于用前外轮是否避过来估计整机 的行驶路线。
第一节 概 述
(2)后轮偏转:车辆前方装有工作装置,若采用前轮偏转方 式,不仅车轮的偏转角将受工作装置的限制,并由于工作装置靠 近前轮,其工作轮压较大,可能要求采用双胎或增大轮胎直径使 轮距及外形尺寸加大,机动性降低,还将使转向阻力矩增加,采 用后轮偏转方式,可以解决上述矛盾。
第二节 轮式车辆的转向理论
轮式车辆在转向或直线行驶过程中,经常要求左右轮以不 同的角速度旋转,其理由是:
1、转向时,外侧车轮所走过的路程较内侧车轮长; 2、当左、右车轮轮胎、载荷、气压不等或磨损不均时,其 实际滚动半径不相等; 3、在高低不平的道路上行驶时,两侧车轮实际走过的路程 不同。
第二节 轮式车辆的转向理论
第二节 轮式车辆的转向理论
1.转向行驶受力分析 在了解轮式车辆转向受力情况以前,先来讨论一下两轮车
转向时的受力情况。假定两轮车在水平地段上以等角速度ωz作低 速稳定转向,略去离心力不计,这时受力情况如图7-3d)所示。
图7-3 两轮车转向时的受力简图
第二节 轮式车辆的转向理论
图7-4 轮式车辆转向时受力简图
第二节 轮式车辆的转向理论
3.转向时,两侧从动轮应能以不同的角速度旋转,以避 免转向时从动轮产生纵向滑移或滑转。这个条件比较容易满 足,因为从动轮是不驱动的,能在轴上自由旋转。
(二)偏转车轮转向车辆的转向动力学
偏转车轮转向的车辆无论是偏转前轮,偏转后轮,还是前后 轮同时偏转,其转向力矩最终是由导向轮与地面相互作用产生 的。其分析方法基本相同,下面我们仅对偏转前轮转向的车辆 在转向时的受力进行分析讨论。
工程机械ppt课件

• 4WD的优点是:四个车轮均有动力,地 面附着率最大,通过性和动力性好。
• 如北京切诺基、长城赛弗、东风本田 CRV汽车等。越野汽车为了充分利用所
有车轮与地面之间的附着条件,以获得
尽可能大的牵引力,而采用四轮驱动。
完整编辑ppt
30
完整编辑ppt
31
完整编辑ppt
32
感谢亲观看此幻灯片,此课件部分内容来源于网络, 如有侵权请及时联系我们删除,谢谢配合!
2021精选ppt282021精选ppt292021精选ppt30四轮驱动四轮驱动4wd4wd无论上面的哪种布局都可以采用无论上面的哪种布局都可以采用四轮驱动以前越野车上应用的最多四轮驱动以前越野车上应用的最多但随着限滑差速器技术的发展和应用但随着限滑差速器技术的发展和应用四驱系统已能精确地调配扭矩在各轮之四驱系统已能精确地调配扭矩在各轮之间分配所以高性能跑车出于提高操控间分配所以高性能跑车出于提高操控性考虑也越来越多采用四轮驱动
液力变矩器
发动机
完整编辑ppt 行星齿轮变速系统 8
完整编辑ppt
9
(3)全液压式传动系统
原理:
通过液体介质的静压力能的变化来传动的。
组成:
由发动机驱动的油泵、液压马达和控制装置。
完整编辑ppt
10
变速操纵杆
液压自动控制装置
液压马达
驱动桥
完整编辑ppt
发动机 油泵
11
完整编辑ppt
12
(4)电传动
• 早期广泛应用在微型车上,现在多 应用在大客车上,轿车上已很少用,保 时捷911采用。
• RR的优点是:结构紧凑,没有沉重的传 动轴,也没有复杂的前轮转向兼驱动结 构。缺点是:后轴荷较大,在操控性方 面会产生与FF相反的转向过度倾向。
机械原理(全套154页PPT课件)
接触,且易于制造,易于保证所要求的制造精度 3)能够实现多种运动轨迹曲线和运动规律,工程
上常用来作为直接完成某种轨迹要求的执行机构。
4)可实现远距离传递的操纵机构。
不足之处: 1)不易于传递高速运动。 2)可能产生较大的运动累积误差。 3)平面连杆机构的设计较为繁难。
§2-1 平面四杆机构的基本形式、演变
构件和零件 构件 机器中的独立运动单元 • 零件 机器中的制造单元
机架(固定构件)
构件分成以下几种
主动件
活动构件
从动件
其中,运动规律已知的活动构件称为原动件,
输出运动或动力的从动件称为输出件。
由若干零件组成 的构件——连杆
1--连杆体 2--螺栓 3--螺母 4--连杆盖
1
2 3
4
二、运动副及其分类
n –活动构件数;Pl –低副数;Ph –高副数
n = 3, Pl= 4 F = 3×3–2×4 = 1
n = 4, Pl = 5 F = 3×4–2×5 = 2
平面机构具有确定运动的条件是:
1)机构自由 度数 F≥1。 2) 原动件数目等于机构自由度数F.
三、计算机构自由度时应注意的几种情况
1) 正确确定运动副的数目 由三个或三个以上构件组成的轴线重
如转动副、移动副。
2)高副:点或线接触的运动副。 如齿轮副、凸轮副。
也可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平 面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空 间运动。如螺旋副,球面副。
第一章
平面机构具有确定 运动的条件
构件运动,即对整个机构运动无关的自由度。
上常用来作为直接完成某种轨迹要求的执行机构。
4)可实现远距离传递的操纵机构。
不足之处: 1)不易于传递高速运动。 2)可能产生较大的运动累积误差。 3)平面连杆机构的设计较为繁难。
§2-1 平面四杆机构的基本形式、演变
构件和零件 构件 机器中的独立运动单元 • 零件 机器中的制造单元
机架(固定构件)
构件分成以下几种
主动件
活动构件
从动件
其中,运动规律已知的活动构件称为原动件,
输出运动或动力的从动件称为输出件。
由若干零件组成 的构件——连杆
1--连杆体 2--螺栓 3--螺母 4--连杆盖
1
2 3
4
二、运动副及其分类
n –活动构件数;Pl –低副数;Ph –高副数
n = 3, Pl= 4 F = 3×3–2×4 = 1
n = 4, Pl = 5 F = 3×4–2×5 = 2
平面机构具有确定运动的条件是:
1)机构自由 度数 F≥1。 2) 原动件数目等于机构自由度数F.
三、计算机构自由度时应注意的几种情况
1) 正确确定运动副的数目 由三个或三个以上构件组成的轴线重
如转动副、移动副。
2)高副:点或线接触的运动副。 如齿轮副、凸轮副。
也可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平 面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空 间运动。如螺旋副,球面副。
第一章
平面机构具有确定 运动的条件
构件运动,即对整个机构运动无关的自由度。
第九章工程机械转向理论解析
第七章 工程机械转向理论
第一节 概述 第二节 轮式车辆转向理论 第三节 履带式车辆转向理论
第一节 概 述
❖ 按转向动力来源:
机械转向 动力转向:液压式、气动式、电动式、和复合式
❖ 按车辆获得转向力矩的方式:
偏转车轮和偏转履带转向。 铰接车架转向。 差速(滑移)转向。
一、偏转车轮转向及偏转履带转向
第二节 轮式转向理论
一、偏转车轮转向理论 (一)、偏转车轮转向车辆的转向运动学
轮式车辆转向基本要求:车轮纯滚动,不发生侧 滑、纵向滑移或滑转。
轮式车辆转向应满足的三个条件: 1).转向时,通过各个车轮几
何轴线的垂直平面都应相交于同一 直线上,这样就能防止各车轮在转 向时产生侧滑现象。
R
Lctga
❖ (4)多桥偏转车轮转向:用于总重和长度特别大的轮式工程机械,如大 型汽车式起重机多采用这种方式。
❖ (5)偏转履带的转向方式:用于超大型机械。
α
ω
β
ω
βα
ω
α
β
αβ
a)前轮偏转车辆转向运动简图
b)后轮偏转车辆转向运动简图
c)前、后轮同时偏转车辆转向运动简图
❖ 多履带行走装置特点:
履带支承面积大,接地比压小,一般为100~ 160kPa;
F驱′Ffk′f动k 力1
′
a) F′Fka′ka
F′kb Fb′Fkb)′kb
F2 FO2r
F′kc
Or zk zk 侧向阻力
F′kc F′kc c)
a)a)
ω FKa Ffk z
θ
ωωz z
bb)) 驱动力2
FKb
F fc
cos
c) c) 驱动力3
第一节 概述 第二节 轮式车辆转向理论 第三节 履带式车辆转向理论
第一节 概 述
❖ 按转向动力来源:
机械转向 动力转向:液压式、气动式、电动式、和复合式
❖ 按车辆获得转向力矩的方式:
偏转车轮和偏转履带转向。 铰接车架转向。 差速(滑移)转向。
一、偏转车轮转向及偏转履带转向
第二节 轮式转向理论
一、偏转车轮转向理论 (一)、偏转车轮转向车辆的转向运动学
轮式车辆转向基本要求:车轮纯滚动,不发生侧 滑、纵向滑移或滑转。
轮式车辆转向应满足的三个条件: 1).转向时,通过各个车轮几
何轴线的垂直平面都应相交于同一 直线上,这样就能防止各车轮在转 向时产生侧滑现象。
R
Lctga
❖ (4)多桥偏转车轮转向:用于总重和长度特别大的轮式工程机械,如大 型汽车式起重机多采用这种方式。
❖ (5)偏转履带的转向方式:用于超大型机械。
α
ω
β
ω
βα
ω
α
β
αβ
a)前轮偏转车辆转向运动简图
b)后轮偏转车辆转向运动简图
c)前、后轮同时偏转车辆转向运动简图
❖ 多履带行走装置特点:
履带支承面积大,接地比压小,一般为100~ 160kPa;
F驱′Ffk′f动k 力1
′
a) F′Fka′ka
F′kb Fb′Fkb)′kb
F2 FO2r
F′kc
Or zk zk 侧向阻力
F′kc F′kc c)
a)a)
ω FKa Ffk z
θ
ωωz z
bb)) 驱动力2
FKb
F fc
cos
c) c) 驱动力3
工程机械设计课件 第5章-轮式工程机械转向系
第三节 偏转车轮转向系设计
设计原则:
偏转车轮转向时,要保证所有车轮都作纯滚动,即应使转向 时所有车轮均绕一个共同的瞬时中心作弧形滚动。
转向半径:
Rmin
L
sin max
车轮偏转角:
cot AF
PF
cot BF
PF
cot cot AF BF 0.5M EF 0.5M EF 2 EF 2BE M
PX P cos Pf
车轮在推力P方向不产生侧滑的条件为:
P Z
所以, P Z 时的β角应该为车轮
偏转角的极限值,即
PX Z cosmax Pf
max
arccos
f
3.单个驱动轮转向时的受力分析
不论在直线或弯道上行驶,只要驱动轮与地面之间有足够的附着 力,驱动力总可以使车轮滚动。
全轮转向式
RF=RB
蟹行转向
偏转后轮式:工作装置前置的机器。有利于简化结构,提高作业性能。
全轮转向一般用于机身较长,常在狭窄场地工作的机器。
斜行转向机械的横坡行驶示意图
可提高作业时的整体稳定性
2. 铰接转向
➢ 优点:
可用非转向桥实现全桥驱动; 结构简单,转向灵活
➢ 缺点:
行驶稳定性差; 转向后不能自动回正; 转向过程可能产生循环功率; 前后车架间的传动布置困难。
转向梯形后置时横拉杆长度系数ka的最优值
kL kc
1.4
1.6 1.8
2.0 2.2 2.4 2.6 2.8 3.0 3.2 3.4 3.6
0.10 0.9049 0.9136 0.9209 0.9272 0.9327 0.9374 0.9415 0.9451 0.9484 0.9513 0.9539 0.9562
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
谢谢!
工程机械的转向理论
•
6、黄金时代是在我们的前面,而不在 我们的 后面。
•
7、心急吃不了热汤圆。
•
8、你可以很有个性,但某些时候请收 敛。
•
9、只为成功找方法,不为失败找借口 (蹩脚 的工人 总是说 工具不 好)。
•
10、只要下定决心克服恐惧,便几乎 能克服 任何恐 惧。因 为,请 记住, 除了在 脑海中 ,恐惧 无处藏 身。-- 戴尔. 卡耐基 。
36、自己的鞋子,自己知道紧在哪里。——西班牙
37、我们唯一不会改正的缺点是软弱。——拉罗什福科
Hale Waihona Puke xiexie! 38、我这个人走得很慢,但是我从不后退。——亚伯拉罕·林肯
39、勿问成功的秘诀为何,且尽全力做你应该做的事吧。——美华纳
40、学而不思则罔,思而不学则殆。——孔子