卫星导航定位算法与程序设计(2014) - 第1课
导航与定位系统课程设计
导航与定位系统课程设计一、课程目标知识目标:1. 理解导航与定位系统的基本概念,掌握其工作原理;2. 了解全球定位系统(GPS)在我国的应用领域和发展趋势;3. 掌握导航与定位技术在生活中的应用及其对科技进步的贡献。
技能目标:1. 学会使用GPS设备进行定位和导航;2. 能够运用所学知识解决简单的导航与定位问题;3. 培养学生的空间想象能力和逻辑思维能力。
情感态度价值观目标:1. 培养学生对导航与定位技术的兴趣,激发其探索科技的热情;2. 增强学生的团队合作意识,使其在合作学习中共同进步;3. 培养学生关注社会热点问题,提高其社会责任感和使命感。
课程性质:本课程为科普性质课程,旨在让学生了解导航与定位技术的基本原理和应用,培养学生的科技素养。
学生特点:六年级学生具有较强的求知欲和好奇心,具备一定的合作能力和自主学习能力。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,以生动有趣的方式传授知识,引导学生主动参与课堂,提高其学习兴趣和积极性。
将课程目标分解为具体的学习成果,便于后续教学设计和评估。
二、教学内容1. 导航与定位系统的基本概念与原理- 导航与定位的定义与分类- 全球定位系统(GPS)的构成与工作原理- 我国导航与定位技术的发展概况2. GPS定位技术在生活中的应用- 交通导航:汽车导航、手机导航等- 地理信息系统(GIS):地图制作、城市规划等- 灾难救援:地震、山洪等自然灾害救援3. 导航与定位技术的未来发展- 北斗导航系统的发展与应用- 车联网技术的兴起与应用- 室内定位技术的发展趋势4. 实践活动与案例分析- 使用GPS设备进行定位与导航操作- 分析导航与定位技术在生活中的具体应用案例- 探讨导航与定位技术对社会发展的积极影响教学内容依据课程目标进行选择和组织,确保科学性和系统性。
教学大纲明确教学内容安排和进度,结合课本相关章节,包括导航与定位基本概念、技术应用、未来发展趋势等。
卫星导航定位算法与程序设计_常用参数和公式讲解

《卫星导航定位算法与程序设计》课程常用参数和常用公式一览编制人:刘晖最后更新:2010年11月26日1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数2,0C=-484.16685×10-6;第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。
卫星导航定位程序设计
实习题
• 采用C/C++语言,实现矩阵的加、减和乘 法运算,要求每种运算用函数实现。
第二章 时间算法
时间算法 > 概述
• 时间的概念
– 时间,是过程的意识经验,是动作或事件发生 时所经历的过程。
– 时间还是表示这些动作或事件的连续性的一维。
• 时间度量的两要素
N modINT JD 0.5,7 星期几
时间算法 > 常用时间算法(3/4)
• 日历时间与GPS时间间的相互转换
– 由日历时间转换到GPS时间(两步)
• 第一步:计算GPS周
GPS WEEK INT JD 2444244.5 7
• 第二步:计算一周内的秒数
– 由GPS时间转换到日历时间(两步)
– 起点 – 尺度
• 时间系统
– 太阳时、恒星时、力学时、原子时等
• 时间与卫星导航定位的关系
时间算法 > 时间的表示方法(1/2)
• 历法(日历表示法)
– 表示方法:年、月、日、时、分、秒。 – 基础:建立在地球绕日公转、月球绕地公转等 – 特点:反映季节变化,与日常生活密切相关;
非连续,不利于数学表达。
概述 > 教学
• 教学方法:课堂讲授+实习
– 课堂讲授 - 每周3学时 – 实习 - 每周4学时
• 要求
– 必须参加所有教学过程
• 考核方法
– 平时实习成果(30%) – 综合成果(40%) – 出勤(30%)
概述 > 参考文献
• 刘基余等,全球定位系统原理及其应用, 测绘出版社,1993。
• 李征航,空间定位技术及应用,武汉大学 讲义,2001。
卫星导航与定位系统基本定位算法

卫星导航与定位系统基本定位算法卫星导航与定位系统是一种利用卫星进行定位和导航的技术系统。
其基本原理是将卫星发射到空间中,通过卫星与地面站之间的通信,获取由卫星发射的信号,并利用这些信号计算出接收器所处的位置。
在卫星导航与定位系统中,基本的定位算法主要包括距离测量、时间测量、角度测量以及协作测量等。
首先,距离测量是卫星导航与定位系统中最基本的定位算法之一、在距离测量中,接收器通过接收来自卫星的信号,计算信号传播的时间,并以此推断出接收器与卫星之间的距离。
距离测量的方法主要包括伪距测量和载波相位测量。
伪距测量是利用信号传播时间与光速之间的线性关系,计算出接收器与卫星之间的距离。
而载波相位测量则是通过计算接收信号的相位差,进一步提高距离测量的精度。
其次,时间测量也是卫星导航与定位系统中常用的定位算法之一、在时间测量中,接收器通过接收来自卫星的定位信号和与卫星同步的精确时间信号,根据信号的传播时间差计算出接收器的定位信息。
时间测量的准确性对于卫星导航与定位系统的定位精度具有重要影响。
因此,接收器需要具备高精度的时钟设备。
此外,角度测量也是卫星导航与定位系统中一种常用的定位算法。
角度测量是通过测量接收器与卫星之间的夹角,计算出接收器所处的位置。
角度测量的方法主要包括方位角测量和仰角测量。
方位角测量是通过测量接收器与卫星之间的方位角,计算接收器的经度位置。
而仰角测量则是通过测量接收器与卫星之间的仰角,计算接收器的纬度位置。
最后,协作测量是卫星导航与定位系统中一种相对较新的定位算法。
协作测量是指通过多个接收器之间的协作,共同对卫星信号进行测量,并计算出各个接收器所处的位置。
协作测量可以提高定位精度,并且对于一些特殊环境下的定位任务具有重要意义,如建筑物高楼、山区等。
总之,卫星导航与定位系统的基本定位算法包括距离测量、时间测量、角度测量和协作测量等。
这些定位算法通过计算卫星信号的传播时间、接收器与卫星之间的夹角等参数,计算出接收器所处的位置信息。
卫星导航定位实验报告

China University of Mining and Technology 《卫星导航定位算法与程序设计》实验报告学号: 07122825姓名:王亚亚班级:测绘12—1指导老师:王潜心/张秋昭/刘志平中国矿业大学环境与测绘学院2015-07-01实验一编程实现读取下载的星历一、实验要求:读取RINEX N 文件,将所有星历放到一个列表(数组)中。
并输出和自己学号相关的卫星编号的星历文件信息。
读取RINEX O文件,并输出指定时刻的观测信息。
二、实验步骤:1、下载2014年的广播星历文件和观测值文件,下载地址如下:ftp:///gps/data/daily/2014/2、要求每一位同学按照与自己学号后三位一致的年积日的数据文件和星历文件,站点的选择必须选择与姓氏首字母相同的站点的数据,以王小康同学为例,学号:07123077,需下载077那天的数据。
有些同学的学号365<后三位<730,则取学号后三位-365,以姜平同学为例:学号10124455,下载455-365=90 天的数据,有些同学的学号730<后三位<=999,则取学号后三位-730,以万伟同学为例:学号:07122854,则下载854-730 = 124天的数据。
可以选择wnhu0124.14n wnhu0124.14o 根据上述要求我下载了2014年第95天的数据,选择其中的wsrt0950.14n和wsrt0950.14o星历文件。
指定时刻(学号后五位对应在年积日对应的秒最相近时刻)的观测值信息如张良09123881,后五位23881,取23881-3600*6= 2281秒,6点38分01秒,最近的历元应该是6点38分00秒的数据。
根据计算与我最接近的观测时刻为2014年4月5日6点20分30.00秒。
3、编程思路:利用rinex函数读取星历文件中第14颗卫星的星历数据并输出显示。
对数据执行762次循环找到对应的2014年4月5日6点20分30.00秒,并输出观测值。
卫星导航定位算法与程序设计(2014) - 第1课

12
软件开发前的准备工作
• 问题定义
– 必须弄清楚你想要解决的问题是什么 – 本课程的问题定义:实现事后处理的GPS标准单点定 位、测速的软件。
13
准备工作
• 需求分析
– 需求详细描述了一个软件系统需要解决的问题
• 明确的需求可以保证是由用户而不是程序员决定系统的功能。 • 明确的需求也可以避免引起争议。 • IBM、GTE、TRW 的数据表明.修正在总体结构阶段发现的 需求错误,将比当时就发现并 修正的成本要高出 5 倍,如果 是在编码阶段,要高出 10 倍,在单元或系统测试阶段,高 20 倍, 在验收测试阶段,高 50 倍,而在维护阶段,竟要比原来 高出多达 100 倍! • 充分进行需求分析是一个项目成功的关键
时间与坐标转换算法 卫星位置与速度计算方法 误差改正算法 。。。。。。
掌握C/C++程序设计方法
项目设计方法 数据结构 编码方法 调试方法
3
课程内容①
软件创建方法与基本过程 C/C++程序设计方法:开发工具,编译,调试 C/C++编码标准 基本算法
5
课程安排①
讲 课 内 容 及 时 数 日/月 至 日/月 周 次 学 时 练习内容及时数 习题课 等 课堂 时数 课外 时数 实验(上机)内容及时数 课堂实习(实验、上 机)内容 课堂 时数 (教 材 章 节 、 名 称)
课 外 时 数
17/1021/10 24/1028/10 31/104/11 7/1111/11 14/1118/11 21/1125/11 28/112/12 5/129/12
有关时间的算法 有关坐标的算法 矩阵运算
卫星导航定位算法与程序设计讲义

第1章
1.1 GPS 算法与程序设计 .......................................................................................... 1 1.2 MATLAB ................................................................................................................ 1 1.3 课程目的及内容 ................................................................................................. 3 第2章 程序设计基础........................................................................................ 4 2.1 程序设计基本思想 ............................................................................................. 4
卫星导航定位算法与程序设计_单点定位程序流程
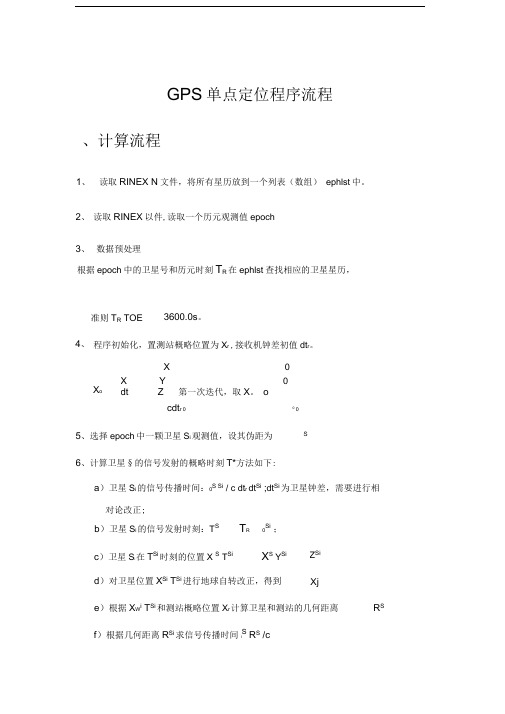
GPS 单点定位程序流程、计算流程读取RINEX N 文件,将所有星历放到一个列表(数组) ephlst 中。
数据预处理根据epoch 中的卫星号和历元时刻T R 在ephlst 查找相应的卫星星历,1、 2、 读取RINEX 以件,读取一个历元观测值epoch3、 4、 准则T R TOE3600.0s 。
程序初始化,置测站概略位置为X r ,接收机钟差初值dt r 。
X oX 0 X YdtZ 第一次迭代,取X 。
o cdt r 00 05、选择epoch 中一颗卫星S i 观测值,设其伪距为 S6、计算卫星§的信号发射的概略时刻T*方法如下:a )卫星S i 的信号传播时间:0S Si / c dt r dt Si ;dt Si 为卫星钟差,需要进行相对论改正;b )卫星S i 的信号发射时刻:T S T RSi;c )卫星S i在T Si 时刻的位置X ST SiX SY SiZ Sid )对卫星位置X Si T Si 进行地球自转改正,得到Xje )根据X W i T Si 和测站概略位置X r 计算卫星和测站的几何距离 R Sf )根据几何距离R Si 求信号传播时间IS R S /cg ) 如果/ o S 10 7,则退出迭代。
T 1SiT R :即为卫星信号发射时刻h )否则0siSi,回带到b )进行迭代。
7、 求卫星§方向余弦V V siVW S77Ss入入 I S 丫丫 sZZ s At o'S —,b iS ,炬’S,b ; 1R iR S R S8、 求卫星S 在观测方程式中的余数项:其中:Si ——卫星S j 的伪距观测值;R Si ——卫星S 到测站的几何距离;c dt S 以米表示的卫星S i 的钟差;d trop ——对流层延迟改正量,单位米,用简化的hopfield 模型计算;diono ——电离层延迟改正量,单位米,采用无电离层伪距组合观测值时,此项为 0;D RTCM ——对伪距的差分改正值,此处为 0;10、 重复第6— 9步,计算每颗卫星的系数和余数项11、 将所有卫星的系数组成误差方程,以x,y,z,cdt r为未知参数进行求解,形式应该是:AX Lb S 0 t 1So 玻。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(测绘工程本科适用)
主讲:王甫红
1
武汉大学0. 概述
武汉大学 测绘学院 空间定位与导航工程研究所
©2005~2011
2
课程目的
深入了解、掌握并实现GPS导航定位基本算法
GPS常用数据格式文件的读取 GPS单点定位算法
8
第一章 程序设计总论
武汉大学 测绘学院 空间定位与导航工程研究所
©2005~2011
9
软件开发步骤
问题定义 需求分析 实现计划 总体设计 详细设计 创建即实现
系统集成 单元测试 系统测试 校正性的维护 功能强化
10
11
软件编码中的具体工作
• • • • • • • • • 验证基础工作已经完成,可以进行创建工作 设计和编写子程序与模块 创立数据类型并命名变量 选择控制结构并组织语句块 找出并修正错误 评审其它小组的细节设计和代码,同时接受其它小组评审 通过仔细地格式化和征集意见改进编码 对分别完成的软件单元进行综合 调整编码使其更小、更快
7
第一讲 程序设计总论 第二讲 C/C++编码规则
2
矩阵算法应用 文本文件读写 时间算法编程 坐标算法编程 Rinex星历文件读取
4
8
第三讲 时间算法与坐标算法
第四讲 Rinex文件数据读取 4.1 Rinex星历文件读取 4.2 Rinex观测文件读取
2
4
9
2
4
10
2
Rinex观测文件读取 卫星位置与速度计算 编程 卫星位置与速度计算 编程 电离层与对流层延迟 改正编程 单点定位与测速编程
5
课程安排①
讲 课 内 容 及 时 数 日/月 至 日/月 周 次 学 时 练习内容及时数 习题课 等 课堂 时数 课外 时数 实验(上机)内容及时数 课堂实习(实验、上 机)内容 课堂 时数 (教 材 章 节 、 名 称)
课 外 时 数
17/1021/10 24/1028/10 31/104/11 7/1111/11 14/1118/11 21/1125/11 28/112/12 5/129/12
4
11
第五讲 卫星位置与速度计算 第六讲 对流层、电离层延迟 改正 第七讲 单点定位与测速
2
4
12
2
4
13
2
4
14
2
6
教学
• 教学方法
– 课堂讲授 – 上机实习
• 要求
– 必须参加所有教学过程
• 考核方法
– 平时实习成果 – 综合成果 – 单点定位程序及报告
7
教材及参考资料
• 李征航等. GPS测量原理与数据处理,2005 • 李洪涛等. GPS应用程序设计,科学出版社, 1999 • C/C++参考书。
– 本课程软件的需求分析 • 程序的输入、输出,定位精度,文件的格式,程序 的运行环境等
14
准备工作
• 结构设计
– 程序的组织形式(模块设计) – 主要的数据结构 – 关键算法 – 用户界面,输入输出,内存管理 – 错误处理 – 结果设计检查
15
准备工作
• 选择编程语言
– 使用自己熟悉的编程语言 – 使用高级编程语言
22
矩阵类的功能②
功能
定义矩阵 矩阵赋值 矩阵运算(加、减、乘、求逆、特征值等) 矩阵元素操作 ……
23
课后作业
• 利用矩阵类,编写两矩阵相加、减、乘与 求逆的程序。
20
系统集成
• 把各个分离的软件部分合并成一个统一系 统。
软件维护与优化
21
矩阵类的使用①
class CMatrix { public: CMatrix(); // 基础构造函数 CMatrix(int nRows, int nCols); // 指定行列构造函数 CMatrix(int nRows, int nCols, double value[]); // 指定数据构造函数 CMatrix(int nSize); // 方阵构造函数 CMatrix(int nSize, double value[]); // 指定数据方阵构造函数 CMatrix(const CMatrix& other); // 拷贝构造函数 virtual ~CMatrix(); // 析构函数 // …… protected: int m_nNumColumns; // 矩阵列数 int m_nNumRows; // 矩阵行数 double*m_pData; // 矩阵数据缓冲区 };
12
软件开发前的准备工作
• 问题定义
– 必须弄清楚你想要解决的问题是什么 – 本课程的问题定义:实现事后处理的GPS标准单点定 位、测速的软件。
13
准备工作
• 需求分析
– 需求详细描述了一个软件系统需要解决的问题
• 明确的需求可以保证是由用户而不是程序员决定系统的功能。 • 明确的需求也可以避免引起争议。 • IBM、GTE、TRW 的数据表明.修正在总体结构阶段发现的 需求错误,将比当时就发现并 修正的成本要高出 5 倍,如果 是在编码阶段,要高出 10 倍,在单元或系统测试阶段,高 20 倍, 在验收测试阶段,高 50 倍,而在维护阶段,竟要比原来 高出多达 100 倍! • 充分进行需求分析是一个项目成功的关键
时间与坐标转换算法 卫星位置与速度计算方法 误差改正算法 。。。。。。
掌握C/C++程序设计方法
项目设计方法 数据结构 编码方法 调试方法
3
课程内容①
软件创建方法与基本过程 C/C++程序设计方法:开发工具,编译,调试 C/C++编码标准 基本算法
• 子程序具有强内聚性
– 每个子程序中只需所好一项工作
• 子程序的长度合适
– 最佳长度为一两页,即66~132行
• 子程序的参数传递
– 参数的格式,传递方式
• 防错性编程
18
软件编码
• • • • • 基本数据类型 自建数据类型 软件的控制问题 布局与风格 外部文档
19
调试与单元测试
• 调试用于改正错误。 • 测试是提高软件质量的方法
有关时间的算法 有关坐标的算法 矩阵运算
文件读取
RINEX格式数据的读取
4
课程内容②
GPS卫星位置计算 由广播星历计算卫星位置 由精密星历计算卫星位置 误差的模型改正算法 电离层折射改正算法 对流层折射模型改正算法 卫星钟差及钟漂的改正算法 码伪距单点定位与测速算法
16
建立子程序
• 设计程序
– 子程序命名,考虑效率 – 子程序的输入输出 – 考虑数据,逐步细化
• 检查程序 • 子程序编码 • 检查代码
17
高质量子程序的特点
• 子程序名称是否恰当
– – – – 用动词待目标的形式,如PrintReport() 使用返回值的描述,如cos() 描述子程序所做的工作 名字的长度符合需要(9~15个字符)