电压环与电流环设计报告
光伏并网型三相逆变器电流内环及电压内环的数模设计
X d =T( e ) X ̄ o ( 3 - 4 1
o s
—
在环境 污染 严重 以及 能源 日益 紧缺 的今天 , 开发利 用可再生绿 色 能源 已经 成为人类 的迫 切需要 。在世界 范围内 , 以美 国 、 日本 、 德 国为 首 的许多 发达国家 大力 发展光伏并 网工程 。从世界 光伏 发电市场看 , 光伏并网发 电近年来发展很快 , 累计市场份额已经超过 8 0 %, 整个 光伏 并 网市场在蓬勃发展” 。 我 国有 着十分丰 富的太阳能资源 , 具 有开发和利用 太阳能的优越 资源 条件 。我 国政府对并 网光伏 发电技术 的研究十分重视 。加强 了对 光伏 发电并 网系统 的设 计 、 关键 的设 备研制和光伏 与建筑相结合等 方 面 的攻关 , 加快 了光伏 发电并 网技 术的发展 , 并 建成 了多座并 网示 范电
I ( ) “ ( ) ( ) L ( ) = ( ) ( R : + , )
Ua - E +L w
I a
U, z ( s ) -E
_
‘ …
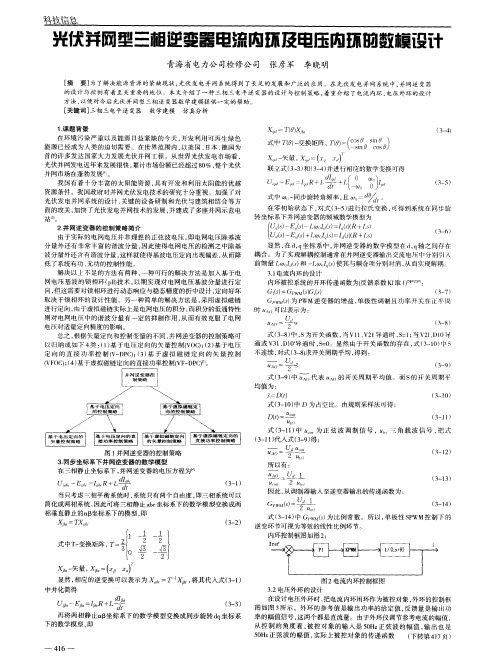
显然 , 在d , q 坐标系 中, 并 网逆变器 的数学模 型在 d , q 轴 之间存在 耦合 。为了实现解耦控制通常在并网逆变器输出交流 电压 中分别引 入 前馈 量 L 。 ( ) 和一 L L ( ) 使其与耦合项分别对消 , 从而实现解耦。
U A O =— 一
U L
向, 但这需要对锁相环进行 动态响应 与稳态精度 的折 中设计 , 定向好 坏
取决 于锁 相环的设计性 能。另一种简 单的解决方法是 , 采用虚拟磁链 进行定 向, 由于虚拟磁链实际上是 电网电压 的积分 , 而积分 的低通特性 则对 电网电压 中的谐波 分量有一定 的抑制作用 , 从而有 效克服 了电网 电压对适量定向精度的影响。 总之 , 根据矢量定 向和控制变量 的不 同 , 并 网逆变器 的控制策 略可 以归纳成 如下 4 类: ( 1 ) 基于 电压 定 向的矢 量控制 ( V O C ) ; ( 2 ) 基于 电压 定 向的 直 接 功率 控 制 f V — D P C ) ; ( 3 ) 基 于 虚 拟 磁链 定 向 的矢 量 控 制 ( V F O C ) ; ( 4 ) 基于虚拟磁链定 向的直接功率控制( V F — D P C ) 。
电压电流环pi算法

电压电流环pi算法
电压电流环PI算法是一种控制算法,用于电压和电流的闭环
控制。
算法步骤如下:
1. 测量电压和电流的反馈值。
2. 计算电压和电流的误差,即目标值(设定值)与反馈值的差值。
3. 根据误差计算电压和电流的控制量,即PI控制器的输出值。
4. 将控制量作为输入信号送入电压和电流的控制系统中,根据具体的控制策略进行调节。
5. 重复上述步骤,实现电压和电流的闭环控制。
具体的PI控制算法如下:
1. 设置比例系数Kp和积分系数Ki。
2. 根据电压和电流的误差e和控制周期T,计算积分项I的增量:δI = Ki * e * T。
3. 根据电压和电流的误差e,计算比例项P的增量:δP = Kp * e。
4. 将积分项和比例项的增量相加得到PI控制器的输出量:U = δI + δP。
5. 将输出量U作为控制信号输入电压和电流的控制系统中。
PI控制算法可以根据具体的应用场景进行调节和优化,以实
现更好的控制效果。
双闭环不可逆直流调速系统实验报告
双闭环不可逆直流调速系统实验报告
实验目的:
1. 理解双闭环不可逆直流调速系统的原理和特点。
3. 熟悉实验设备的使用和实验过程。
实验原理:
双闭环不可逆直流调速系统由速度环和电流环两个闭环组成,其基本原理如下:
1. 速度环控制
在速度环内部,输入为期望转速,输出为电压控制器的输出信号。
速度环主要根据实
际转速和期望转速之间的差异,计算出电压控制器的控制量,并根据电压控制器的输出改
变电机的电压,以达到调速的目的。
实验步骤:
1. 准备实验设备:电机、电压变压器、电流反馈电阻、示波器、信号源、功率放大器、控制器等。
2. 按照实验原理中的模型,建立电机的电压-转速模型和电机的电流-转矩模型。
3. 根据模型,编写控制算法。
4. 将实验设备连接好,将模型和算法输入控制器。
5. 设置期望转速和电流控制量,并启动电机。
6. 分析实验结果,评估控制系统的性能。
实验结果:
本次实验中,我们成功建立了双闭环不可逆直流调速系统的模型,并利用控制器实现
了系统的控制。
我们通过改变期望转速和电流控制量,观察了系统的实际转速和转矩变化。
实验结果表明,双闭环控制系统的性能稳定,具有较好的调速性能和响应速度。
结论:。
开关电源中的比较常见的双重环路及其应用
开关电源中的比较常见的双重环路及其应用
工程师都知道,开关电源中离不开环路设计。
环路影响到开关电源的诸多性能指标,譬如输出纹波,动态特性,稳定性,保护特性等。
这篇文章将从下面四个方面讲一讲开关电源中的比较常见的双重环路及其应用:
1.单电压环与单电流环
2.电压环和电流环的双环竞争
3.电压外环电流内环
4.两种双环控制在车载电源产品中的应用
一、单电压环与单电流环
闭环就是通过对被控制变量进行负反馈与设定值进行比较,得到他们之间的偏差,然后通过控制偏差,来实现被控变量稳定在设定值附近。
生活中最常见的一个负反馈闭环就是骑自行车,如果我们想走一条直线,而实际往左偏了,就会将车把手往右调整,如果往右偏了,就往左调整。
最后肯定稳定在这条想走的路线的附近。
如果自行车整个过程一直都是向左偏离一个角度,这个就是静差,也叫稳态误差。
如果自行车稳定在设定路线的左右偏差一点,这个就是误差摆幅,有些场景下也叫纹波峰峰值。
车辆一直行使在设定路线附近,而且偏差小,遇到紧急避让的情况下(动态扰动)也绝不摔倒——这就是好的环路设计。
在比较简单的开关电源中,只需要一个单闭环就可以实现产品的恒压或者恒流输出。
对于恒压源,只需要控制输出电压稳定,对于恒流源只需要控制输出电流稳定。
这里通过最常见的buck电路的单电压闭环和单电流闭环来来分析一下。
以最常见的PI控制作为补偿控制环节。
1)其电压单环的控制闭环框图如下:其中Kadc为采样及反馈环节,Plant。
pwm电压环和电流环反馈的原理

pwm电压环和电流环反馈的原理
PWM(脉宽调制)电压环和电流环反馈是控制电源转换器的重要
部分,用于确保输出电压和电流稳定。
首先,让我们从PWM电压环
反馈的原理开始。
PWM电压环反馈的原理是通过比较实际输出电压与期望输出电
压的差异,然后调整PWM信号的占空比来实现电压调节。
具体来说,当实际输出电压低于期望值时,控制回路会增加PWM信号的占空比,从而增加开关管的导通时间,提高输出电压;相反,当实际输出电
压高于期望值时,控制回路会减小PWM信号的占空比,降低开关管
的导通时间,降低输出电压。
这种反馈机制能够使输出电压稳定在
期望值附近。
接下来是电流环反馈的原理。
电流环反馈通常用于控制开关电
源转换器的输出电流。
它的原理是通过比较实际输出电流与期望输
出电流的差异,然后调整PWM信号的占空比来实现电流调节。
当实
际输出电流低于期望值时,控制回路会增加PWM信号的占空比,增
加开关管的导通时间,提高输出电流;当实际输出电流高于期望值时,控制回路会减小PWM信号的占空比,降低开关管的导通时间,
降低输出电流。
这种反馈机制能够使输出电流稳定在期望值附近。
总的来说,PWM电压环和电流环反馈的原理都是基于比较实际输出与期望值的差异,然后通过调整PWM信号的占空比来实现稳定的电压和电流输出。
这种反馈机制能够有效地提高电源转换器的稳定性和性能。
电流内环和电压外环的作用

电流内环和电压外环的作用
在电气控制领域,电流内环和电压外环是常见的控制方法,常用于电动机控制器、功率因数控制器、变频器等的控制。
电流内环的作用是控制电动机磁场强度,使得电动机的转矩能够与指令保持一致。
电流内环控制器的输入是电机的电流信号,输出是一个控制电压,将电动机的电流和指令电流误差进行处理,以控制电机的输出转矩。
电流内环通过pwm控制器调节电机的电流来实现转矩和速度的控制。
电压外环的作用是控制电动机的输出电压,以保持指定的输入电压水平。
电压外环的输入是电动机的输出电压信号,输出是一个控制电压,将电机的电压和指令电压误差进行处理,以控制电动机的输出电压。
电压外环作为电动机控制的主要环节,需要通过pwm控制器将电机输出电压控制在设定范围内,进而实现电动机的控制。
电流内环和电压外环结合起来,可以实现电机的稳定控制,同时保护电机免受电力系统波动的影响。
它们在电气控制领域具有重要的意义。
逆变器电压电流双闭环控制系统设计
逆变器电压电流双闭环控制系统设计余裕璞;顾煜炯;和学豪【摘要】逆变器在可再生能源发电中作为连接能量输入与输出负载的装置,发挥着重要作用,采用合适的控制系统可以得到满足后端电能质量需求的电能.针对电压单环控制调整滞后的缺点,补充中间电流反馈环节以提高控制系统的工作频率.比较了电感电流内环与电容电流内环反馈系统的区别,选取负载抗扰动性能更强的电容电流反馈系统,该控制方案对一般及整流性负载的干扰同时具有较强的平抑能力.针对输出电压及电感电流在数学模型上的交叉耦合作用,通过耦合信号前馈削弱其对控制系统的影响.提出一种基于“模最佳”的整定方法,对调节器的参数进行设计,最终利用仿真验证了所提设计方案的有效性.【期刊名称】《电力科学与工程》【年(卷),期】2019(035)003【总页数】7页(P1-7)【关键词】逆变器;双闭环控制;前馈解耦;模最佳【作者】余裕璞;顾煜炯;和学豪【作者单位】华北电力大学能源动力与机械工程学院,北京102206;华北电力大学能源动力与机械工程学院,北京102206;华北电力大学能源动力与机械工程学院,北京102206【正文语种】中文【中图分类】TM7120 引言可再生能源在能源安全、能源总量、能源可靠性、环境无污染等方面均优于传统化石能源[1~3]。
微电网技术是利用可再生能源的主要方式之一[4~6],“就地采集、就地使用”减少了中间环节的损耗,提高能量利用率。
逆变器是微电网中用于电能转换的主要装置[7],保证微网运行可靠性。
逆变器的控制方案不局限于一种[8,9],主要根据其运行目标确定。
在离网运行方式下其运行目标是维持母线电压和频率的恒定,保证负荷的电能质量需求,并网模式下运行一般要求输出给定的有功和无功[10]。
逆变器控制早期采用输出电压瞬时值反馈的单环控制,可以在一定程度上抑制负载的扰动,调节输出电压的波形,但是负载发生较大变化时输出电压畸变严重,其动态响应慢导致电压畸变调整时间长,不利于负载的正常工作。
基于电压电流双环控制的数字PFC电路设计研究
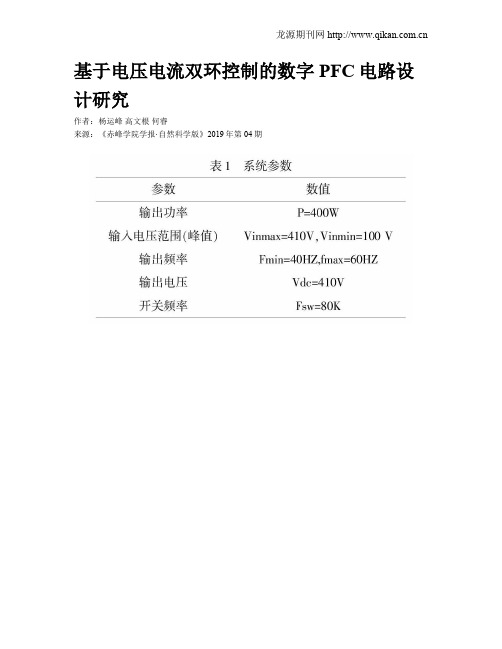
基于电压电流双环控制的数字PFC电路设计研究作者:杨运峰高文根何睿来源:《赤峰学院学报·自然科学版》2019年第04期摘要:设计了一种基于TMS320F28335型DSP处理器的电压电流双环控制的数字PFC电路,重点研究了电压电流双闭环数字控制回路的设计,给出了具体PI参数计算例程,最后在Matlab/Simulink中建立了该双闭环控制系统的仿真模型,并对其结果进行了研究分析.关键词:数字PFC;双环控制;PI参数中图分类号:TM13;TM461; 文献标识码:A; 文章编号:1673-260X(2019)04-0024-04 引言传统的功率因数校正技术(PFC)主要通过模拟控制实现,该方法虽然成熟可靠但随着开关电源逐步朝着高頻化小型化发展,模拟控制方式带来的器件多,控制复杂等缺点逐渐显现[1-2].如今随着数字控制的不断发展,越来越多的电力电子装置开始使用数字处理器(DSP)控制方式,它具有体积小、控制外围电路简单、控制方式灵活等优点.TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSP相比,平均性能提高50%[3].文章阐述了基于DSP的功率因数校正电路的原理,以Boost-PFC电路拓扑结构为例实现数字控制PFC电路的参数计算,元器件的选型,和作为数字实现功率因素最重要的环节即电压电流双环控制的PI参数整定,最后通过仿真验证了系统设计的准确性.1 数字PFC电路结构与工作原理该PFC电路的主要组成部分由以下几个部分组成,分别是单相桥式不控整流电路,单相Boost升压电路,DSP处理器构成的控制电路,以及信号调理与检测电路.PFC电路想要实现高功率因数它的基本思想是当交流电经过单相不控整流电路后得到的整流电压电流作为整个PFC 系统电路的输入电流电压,这个得到的电压电流经过后续的 Boost型DC/DC变换电路之后,通过在DSP中使用相应的控制方法使得该电路输入的电流信号能够自动的跟随输入电压信号,即实现了电压电流的相位同步,达到提高功率因数的目的,如果要使得输出直流电压很稳定则必须对的电路进行闭环控制.2 单相PFC的控制策略本次设计PFC电路采用电压电流双环控制模式,其具体工作过程如下:输出的参考电压信号Ud*和经过PFC电路之后的输出电压Ud信号两者送到一个电压PI控制器,经过PI比较处理环节得到的信号我们把它作为是电感电流的大小参考信号Vg,这个电流参考信号Vg与整流后的输入电压信号Vs经过一个乘法器,通过乘法器能够使电流获得与输入电压相同的相位,其中电压环PI控制器由于含有积分器有助于消除稳态误差,整流之后的输入电压信号主要能够为电流参考信号提供相位支持,使得电感电流能够得到与电压信号两者具有相同的相位(相位相同,幅值虽然不同可以通过后续的控制算法来调整)[4].而这个信号即作为为电流环的电流大小参考命令IL*,同时将采样后的真实的电感电流信号IL与电流参考信号IL*经过一个电流PI控制器环节后得到的比较信号与DSP控制器的PWM比较单元产生一定的频率相同但是占空比大小不同的PWM脉冲序列信号从而控制电路的开关管开通与关断,以此来不断地调整开关通断时间使得实现电流跟踪电压相位达到功率因数为1的目标.3 主电路参数设计计算由于在开关电源电路中电感占据最重要的地位,电感的设计也最为复杂,我们可以通过以下几个步骤来设计.3.1 确定电感的大小(1)首先确定输入电流峰值的最大值:当输入电压最小时,输入电流的峰值能达到最大值,同时考虑到电源效率为92%(PFC变换器及DC/DC变换器的效率分别为96%).(2)电感中纹波电流峰峰值.电感电流的峰峰值选取一般工程设计上取经验值,PFC电路的升压电感最大峰峰值可取PFC电路输入电流大小的20%.(3)计算占空比当输入的电流峰值最大时的占空比为:(4)计算电感量:根据以上公式可以并确定电感量为1.2mH.3.2 输出电容的选择PFC Boost电路的整流输出电压为2倍工频纹波,其纹波大小由输出电流和输出电容Co 决定,一般来说根据3W选取的原则即PFC输出功率的3倍值来选取输出电容的大小,通过计算可以取输出电容Co=1000μF.3.3 功率开关管的选择由于在本电路设计中PFC变换器的开关管开关频率设定为80KHz,所以功率开关管类型选择MOSFET.且此开关管的耐压值要大于PFC电路的输出电压,至少留有1.5倍电压裕量,开关管的额定电流大于PFC电感电流并且留有1.5倍的安全裕量.3.4 快恢复二极管的选择开关管关断时会使得二极管承受极高的反向电压,为了防止二极管被这个反向电压击穿所以在选择二极管时要考虑到快恢复特性,防止大的灌电流对开关管造成损坏二极管要承受反向输出电压故其额定电压要大于电路的输出电压,输出电流为1.5的电感电流IL裕量左右.4 控制回路设计在PFC数字控制回路中包含了两个环路;其中内环构成了电流环,PFC的电流内环的两个输入是经过电压外环之后的参考电流信号IACref和实际检测到的电感电流的信号IAC.其中电流环通过电流PI控制器的作用产生控制输出信号与DSP内部比较单元发生比较后得到控制开关管开通与关断的频率相同占空比不同的PWM脉冲信号,通过电流环的调节作用这样使得实际的电感电流IAC能够跟随参考电流IACref[5].与电压环相比,由于作为PFC电流内环,故其电流环应具有较快的响应速度,使之能够快速的让输入电流信号跟踪输入电压信号的相位,所以PFC电流内环的带宽应更高,这样才能准确无误的跟踪两倍于输入电网电压频率的半正弦波形.上图中外环构成PFC电路的电压环,其中电压外环的两个输入信号分别是用户输入参考电压信号VDCref和检测到的PFC输出直流电压信号VDC.电压PI控制器用于通过比较计算后产生控制输出误差信号,这样无论PFC输出端的负载电流IO和输入端电网的供电电压VAC 发生怎样的变化,其输出端直流母线电压VDC都将通过电压环的反馈调节从而保持稳定.由电压PI控制器产生电压误差控制信号作为电流内环的参考信号IACref.4.1 电流环PI控制器设计在本次PFC功率因数校正电路设计中设计电流环控制器时其电流环带宽选择8K,这样电流能够较好的跟踪经过整流电路之后的频率为100Hz或者120Hz的半波正弦输入电压,根据到单片机在进行数字采样计算时会有延时误差等数字延时的考虑,故在这里对PFC电流PI控制器的“零点”进行配置,因此对于相位交点频率为8kHz情况,电流环“零点”配置在远小于该频率处以避免数字延时,故本文中电流PI控制器的零点选择800Hz.在设计电压电流环路时需要确定框图中K1K2K3的系数,计算公式给出如下:4.2 电压环PI控制器设计在开关电源等电路设计时,我们在设计电压环控制器时电压环带宽一般选择为电网电压频率的1/10,在本设计中由于整流之后電网电压频率为100Hz,所以在这里我们选择电压环的带宽为10Hz,在该处此时电压环的带宽远小于100Hz或120Hz的电网电压输入频率,这样做的好处是能够明显的消除直流母线电压中的谐波干扰,对于提高系统稳定性有极大的帮助.在设计电压PI控制器的零点时选择其与电压环的带宽相同,考虑到单片机在采样时会有延时,所以在电压环带宽为10Hz时数字延时不是那么明显.有利于保证采样的准确性.其中Zfcv为负载的输出等效阻抗,该负载输出阻抗等效了PFC电路输出滤波电容,PFC 输出负载阻抗的两者并联组合,通过等效负载输出阻抗参数来反应电压环的精确性.5 系统仿真本文通过在MATLAB仿真软件上针对以上算法进行了仿真,PFC电路交流输入为220V,峰值输入电压为90V-265V,电压频率为工频50Hz,开关管的开关频率为80kHz,实验仿真如以下图,图5显示的是电路经过PFC后可以看出电流能够跟踪电压相位,使得功率因数接近于1达到了设计的目的.图6显示的是输出电压波形,其值大小稳定在410V,符合设计要求.6 结论本设计针对目前模拟控制方式PFC电路的各种缺点,提出了一种基于DSP数字控制方式的PFC电路的主电路参数设计以及控制回路的PI参数设计,最后通过仿真验证了设计的可行性.参考文献:〔1〕王跃林,申群太.基于DSP数字控制的Boost-PFC系统的设计[J].通信电源技术,2007,24(6):73-75.〔2〕文雪峰,佃松宜,邓翔.基于数字双环控制的功率因数校正控制算法[J].电力系统自动化,2014,38(3):36-40.〔3〕丁凯.基于DSP的三电平PWM整流器的控制策略研究[D].东南大学,2015.〔4〕陈倩玉.ZVS半桥三电平充电机控制策略研究和实现[D].电子科技大学,2016.〔5〕张亚州.浅谈有源功率因数的校正及有源滤波技术的研究[J].建筑工程技术与设计,2017(20).。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电压环与电流环设计报告
————————————————————————————————作者:————————————————————————————————日期:
控制电路设计
一、电流环的设计
电流环的设计核心是控制主电路上电感电流的平均值,使它处于稳定状态,根据主电路与设计思路得电流控制环的系统框图如下:
-
+
Vcv PI 1/Vs
Vd
Vo
+
-1/SL
IL
K1
其中Vcv 为电压环的输出电压(即系统的参考电压),Vs 为锯齿波的幅值,IL 为电感上的电流,K1为采样的放大倍数。
设置PI 为单零点—单极点补偿网络。
如下图所示:
R1
R2C1
-+
因为系统的开关频率为100KHZ ,为了避免开关频率对控制环路的影响,穿越频率fci 必须远远小于开关频率,当然为了对系统动态响应的速度,我们希望fci 越大越好,在一般的开关电源中,fci 都小于开关频率的1/10,此处我们设置为开关频率的1/10,即10KHZ 。
补偿网络的传递函数为:211111
()R C S G s R C S
+= , 由系统框图可以得系统的开环传递函数为:21211(1)11
()1S R C S G S K R C S V SL
+=
, 式中:Vs=5V ;L=15uH;
K1=1/100; S=jw;代入上式,当fci=10KHz 时,2()G S =1,令补偿零点角频率1211w R C =
在fci/2处,即121
1
w R C ==5KHz ,经计算得11R C =62.710-⨯,21R C =4210-⨯,所以
2
1
R R =74,令1R =1K ,得2R =74K ,1C =2.7 nf, 代入得开环传递函数为:224
5000
()/10
S G S S -+=,经MATLAB 画出BODE 图如下:
从上图可以看出,在(1/2)fci 频率处,开环传递函数的斜率由-40dB 变成-20dB ,可以达到较快的动态响应,由于传递函数以-20dB 的斜率穿越0dB 线,也可以获得足够的相位裕量(64度)。
同时由于从0Hz~(1/2)fci 之间,开环传递函数以-40dB 斜率衰减,可以获得很高的静态增益,从而使得静态误差非常的小。
根据乃奎斯特环路稳定性判据,系统是稳定的,设计也合理。
二、电压环的设计
在电压环的设计中,电流环可视为控制对象的一个环节,因此先得求取电流控制环的闭环传递函数,由前面的电流控制环的开环传递
函数2245000()/10S G S S -+=
得闭环传递函数为:3
245000
()/105000
S G S S S -+=++,同理MATLAB 得其BODE 图如下:
根据该闭环传递函数的BODE 图,为了便于分析我们用传递函数
44
1
()1/10G S S =
+近邻代替它来处理,4()G S 的BODE 图如下所示:
再根据整个电路,可以得电压环控制系统的构图如下 :
PI CA 1/SC K2
K2+
-
Vref
Vo
框图中Vref 为系统给定电压(2.5V ),CA 电流环控制单元,K2为输出电压采样放大倍数,Vo 为输出电压,1/SC 为输出阻抗。
PI 调节器采用与电流环结构一样的单极点—单零点补偿网络,如下图所示:
R3
R4C2
-+
由于在fci 以下,电流环增益为1,相位为0,在电压环的设计中,电流环为单位1,为了使整个系统得到较高的中频带宽,设电压环的穿越频率fcv=1KHz,电压环PI 补偿零点角频率242
1
w R C ==(1/2)fcv,设计方法与电流环的设计一样:
在f<fci 下,系统的传递函数为:42532(1)1
()2R C S G S K R C S SC
+=
, 其中
K2=2.5/12=1/4.8,C=4700uf, S=jw ,当fcv=1KHz 时,5()G jw =1,代入
计算得42R C =1/500,32R C =59.9110-⨯,所以
4
3
R R =20,取3R =1K ,
4R =20K ,2C =0.1uf,将计算结果代入523500
()/(1.1210)
S G S S -+=
⨯,得BODE 图如下:
由此得出的结果与电流环控制环类似,系统是稳定的。
当f>fci 时,把整个电流环加入系统中,得整个电压环的开环传递函数为:
6234
5001
()/(1.1210)1/10S G S S S -+=
⨯+,得到BODE 图如下:
由整个BODE 图可知,系统在0—500Hz 时以-40dB 斜率下降,具有较高的静态
增益,从而使得静态误差非常的小,在(1/2)fcv(500Hz)频率处,开环传递函数的斜率由-40dB 变成-20dB ,并以-20dB 的斜率穿越0dB 线,可以获得足够的相位裕量58度。
当f>fci 时,开环传递函数的以-40dB 斜率下降,从而系统有较大的抗干扰能力。