电压环与电流环设计
开关电源中的比较常见的双重环路及其应用
开关电源中的比较常见的双重环路及其应用
工程师都知道,开关电源中离不开环路设计。
环路影响到开关电源的诸多性能指标,譬如输出纹波,动态特性,稳定性,保护特性等。
这篇文章将从下面四个方面讲一讲开关电源中的比较常见的双重环路及其应用:
1.单电压环与单电流环
2.电压环和电流环的双环竞争
3.电压外环电流内环
4.两种双环控制在车载电源产品中的应用
一、单电压环与单电流环
闭环就是通过对被控制变量进行负反馈与设定值进行比较,得到他们之间的偏差,然后通过控制偏差,来实现被控变量稳定在设定值附近。
生活中最常见的一个负反馈闭环就是骑自行车,如果我们想走一条直线,而实际往左偏了,就会将车把手往右调整,如果往右偏了,就往左调整。
最后肯定稳定在这条想走的路线的附近。
如果自行车整个过程一直都是向左偏离一个角度,这个就是静差,也叫稳态误差。
如果自行车稳定在设定路线的左右偏差一点,这个就是误差摆幅,有些场景下也叫纹波峰峰值。
车辆一直行使在设定路线附近,而且偏差小,遇到紧急避让的情况下(动态扰动)也绝不摔倒——这就是好的环路设计。
在比较简单的开关电源中,只需要一个单闭环就可以实现产品的恒压或者恒流输出。
对于恒压源,只需要控制输出电压稳定,对于恒流源只需要控制输出电流稳定。
这里通过最常见的buck电路的单电压闭环和单电流闭环来来分析一下。
以最常见的PI控制作为补偿控制环节。
1)其电压单环的控制闭环框图如下:其中Kadc为采样及反馈环节,Plant。
pwm电压环和电流环反馈的原理

pwm电压环和电流环反馈的原理
PWM(脉宽调制)电压环和电流环反馈是控制电源转换器的重要
部分,用于确保输出电压和电流稳定。
首先,让我们从PWM电压环
反馈的原理开始。
PWM电压环反馈的原理是通过比较实际输出电压与期望输出电
压的差异,然后调整PWM信号的占空比来实现电压调节。
具体来说,当实际输出电压低于期望值时,控制回路会增加PWM信号的占空比,从而增加开关管的导通时间,提高输出电压;相反,当实际输出电
压高于期望值时,控制回路会减小PWM信号的占空比,降低开关管
的导通时间,降低输出电压。
这种反馈机制能够使输出电压稳定在
期望值附近。
接下来是电流环反馈的原理。
电流环反馈通常用于控制开关电
源转换器的输出电流。
它的原理是通过比较实际输出电流与期望输
出电流的差异,然后调整PWM信号的占空比来实现电流调节。
当实
际输出电流低于期望值时,控制回路会增加PWM信号的占空比,增
加开关管的导通时间,提高输出电流;当实际输出电流高于期望值时,控制回路会减小PWM信号的占空比,降低开关管的导通时间,
降低输出电流。
这种反馈机制能够使输出电流稳定在期望值附近。
总的来说,PWM电压环和电流环反馈的原理都是基于比较实际输出与期望值的差异,然后通过调整PWM信号的占空比来实现稳定的电压和电流输出。
这种反馈机制能够有效地提高电源转换器的稳定性和性能。
电压电流双环控制原理
电压电流双环控制原理嘿,咱来聊聊电压电流双环控制原理这个超厉害的家伙吧!这电压电流双环控制啊,就像是一个聪明的指挥官,在电路的世界里有条不紊地指挥着一切,让电流和电压都乖乖听话,为我们的各种电子设备和系统提供稳定可靠的动力。
你看,电压就像是电路中的“压力”,它推动着电流这个“小水流”在电路中流动。
而电流呢,就像是电路中的“流量”,它带着能量在各种元器件之间穿梭。
电压电流双环控制原理就是要同时管理好这两个家伙,让它们协同工作,达到我们想要的效果。
想象一下,电路就像一个繁忙的交通枢纽,电压是交通规则中的“限速标志”,它规定了电流这个“车辆”行驶的速度上限。
如果电压不稳定,一会儿高一会儿低,就好比限速标志一会儿变成80公里每小时,一会儿又变成20公里每小时,那电路里的电流可就乱套啦,电子设备也会像在颠簸的路上行驶的汽车一样,出现各种问题,甚至可能“抛锚”。
所以,电压环的作用就是要确保电压保持在一个合适的范围内,就像一个严格的交警,时刻盯着电压这个“限速标志”,不让它出现太大的波动。
而电流环呢,就像是交通枢纽中的“流量监控器”。
它要保证电流按照我们的需求来流动,不能太多也不能太少。
如果电流过大,就像交通枢纽中突然涌入了大量的车辆,会导致道路拥堵,电路中的元器件可能会因为承受不了这么大的电流而发热损坏。
相反,如果电流过小,电子设备就可能得不到足够的能量,无法正常工作,就像汽车没油了一样,只能停在路边。
所以电流环要根据实际情况,及时调整电流的大小,让它始终保持在一个合适的水平,就像一个智能的交通指挥系统,合理地控制着车辆的流量,确保交通顺畅。
在电压电流双环控制中,这两个环是相互配合的哦。
就像一场精彩的双人舞,电压和电流相互呼应,彼此协调。
当电压出现变化时,电压环会迅速做出反应,调整输出,然后电流环会根据电压的变化,相应地调整电流,以保持整个电路系统的稳定。
这种紧密的配合就像是两个默契十足的舞者,一个动作的变化会立刻引起另一个的回应,共同演绎出完美的舞蹈。
4-20mA电流环、电压电流转换芯片方案比较
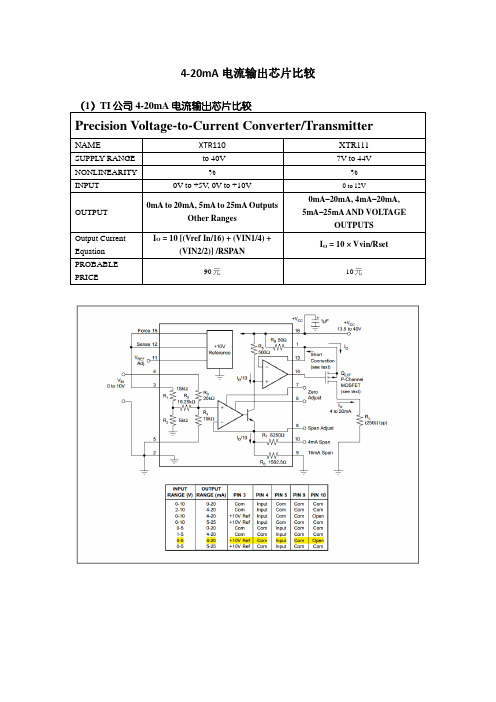
4-20mA电流输出芯片比较(1)TI公司4-20mA电流输出芯片比较Precision Voltage-to-Current Converter/Transmitter NAME XTR110 XTR111 SUPPLY RANGE to 40V7V to 44V NONLINEARITY%% INPUT0V to +5V, 0V to +10V0 to 12VOUTPUT 0mA to 20mA, 5mA to 25mA OutputsOther Ranges0mA–20mA, 4mA–20mA,5mA–25mA AND VOLTAGEOUTPUTSOutput Current Equation I O = 10 [(Vref In/16) + (VIN1/4) +(VIN2/2)] /RSPANI O = 10 × Vvin/RsetPROBABLEPRICE90元10元XTR110应用电路XTR111内部没有提供将0V输入转换成4mA输出的电路,最常用的方法是采用两个电阻网络连接参考电压和输入信号进行分压输入XTR111 应用电路4-20mA CURRENT TRANSMITTERwith Sensor Excitation and Linearization NAME XTR105XTR112XTR114 SUPPLY RANGE to 36VPRECISION CURRENT SOURCESINPUT EXCITATION2- OR 3-WIRE RTD OPERATIONOutput Current Equation IO = VIN (40/RG) + 4mA, VIN in Volts, RG in Input Offset V oltage VCM = 2VPROBABLE PRICE25元50元60元XTR105/XTR112/XTR114原理图4-20mA Current-Loop TransmitterNAME XTR115XTR116XTR117 SUPPLY RANGE to 36V to 40V VFOR SENSOR EXCITATION NC LOW QUIESCENT CURRENT200μA130A LOW SPAN ERROR%LOW NONLINEARITY ERROR%PROBABLE PRICE20元15元XTR115/XTR116/XTR117原理图RCV42——4-20mA电流转0-5V电压基本连接RCV42——4-20mA电流转0-5V电压实例XTR101--Precision, Low Drift 4-20mA TWO-WIRE TRANSMITTERXTR106-- 4-20mA CURRENT TRANSMITTER with Bridge Excitation and LinearizationXTR108-- 4-20mA, TWO-WIRE TRANSMITTER “Smart” Programmable with SignalConditioningXTR300-- Industrial Analog Current/V oltage OUTPUT DRIVER(2)AD公司4-20mA电流输出芯片比较DAC and Current TransmitterNAME AD420AD5412AD5422AD694 FUNCTION DAC4–20 mA Transmitter RESOLUTION161216-SUPPL YRANGE12-32V A VDD: A VSS:V to 36 VINPUT16BITDIGITALSerial Input12BITDIGITALSerial Input16BITDIGITALSerial InputPrecalibrated InputRanges:0 V to 2 V, 0 V to 10 VOUTPUT 4 mA to 20 mA, 0mA to 20 mA,0 mA to 24 Ma0 V to 5 V, 0 V to10 V, ±5 V, ±10 V 4 mA to 20 mA, 0mA to 20 mA,0 mA to 24 mA0 V to 5 V, 0 V to10 V, ±5 V, ±10 V4 mA to 20 mA, 0mA to 20 mA,0 mA to 24 mA0 V to 5 V, 0 V to10 V, ±5 V, ±10 V4–20 mA, 0–20 mAPROBABLEPRICE60元50元60元50元AD420—standard configurationAD5412/5422—in HART configuration AD694—standard configuration(3)AMG公司4-20mA电流输出芯片比较NAME DESCRIPTION PROBABL E PRICEAM40050元AM46040元AM46240元AM400—standard configuration AM460—standard configurationAM462—standard configuration另查过Linear和MAXIM公司无相关产品。
利用UC3907设计的均流电路

利用UC3907设计的均流电路1引言在实际应用中,为了获得需要的容量和一定的冗余,电源系统经常将电源模块并联使用,对电源系统的基本要求是:——在电网扰动或负载扰动时,保持输出电压稳定;——控制各模块电流,使其均分负载电流。
为了最大程度地获得系统稳定性,电源系统还有以下要求:——设置模块冗余,使任一模块损坏,剩下的模块能提供足够的电流,而不致影响电源系统的工作;——完成负载均分功能,而不需其它的外置控制设备。
另外,针对完成均流,电源系统还需要以下的功能:——有一个公共的、低带宽的均流总线来连接所有的模块单元;——具有良好的均流瞬态响应;——使用一个控制器调节输出电压。
总之,希望由各模块构成的电源系统能形成一个整体,各模块平均分配应力。
并且这时如果使用均流技术,系统的稳定性最高。
我们在设计20A和50A的电源模块应用电路时就采用了美国UNITRODE公司的均流芯片,相对其它均流方法取得了较好的均流效果,并为电源模块热插拔的实现奠定了基础。
2均流方法电流均流法很多,有:下垂法、主从法、外接控制器法、平均电流法、最大电流法等。
相对而言最大电流法性能最好,调整简单易实现,均流母线开路或短路都不会影响各电源模块的独立工作,任一模块的故障也不会影响均流功能的实现。
UC3907采用的就是最大电流法,。
原理是各模块电流和模块的最大电流相比较,相应调整参考电压以校正模块输出电流的不均衡度。
这种方法和平均电流法相似(。
由图3可知,UC3907从结构上可以分为电压环和电流环两部分。
电压环由电压放大器、地放大器和驱动放大器构成;电流环由电流放大器、调整放大器、缓冲放大器和状态指示构成。
关于电力操作电源两种控制方式的比较doc-关于电力操作电
关于电力操作电源两种控制方式的比较doc-关于电力操作电引言开关电源是一个闭环的自动操纵系统,开关电源的操纵环节的设计是其设计的重要组成部分。
其常用的设计步骤是对主电路建立小信号模型,作出开环波特图,然后按照性能指标要求,运用经典自动操纵理论,设计校正系统,使系统具有良好的稳态和暂态性能。
专门多研究者对开关电源的操纵系统进行了分析[1][4]。
应用在电力领域的开关电源一样要求能工作在恒压和恒流两种模式,在操纵上有两种常用的实现方式:一种是采纳并联式双环操纵,在系统中建立两个独立的电压环和电流环。
这种操纵方式简单稳固,容易设计,稳固时只工作在某个单环操纵下,两个操纵环可不能互相干扰,能够保证专门好的恒压和恒流精度。
另一种是采纳串级式双环操纵,当系统工作在恒压模式下时是用双环操纵,工作在恒流模式下是用单环操纵。
电力操作电源一样为并联工作的模块式电源,在这种并联运行的电源中限流特性十分重要,否则当一台模块退出工作时,其它模块会因不能及时限流而引起连锁反应,相继爱护退出工作。
另外,从操纵的角度来讲,减小运行参数对操纵系统稳固性的阻碍,增强系统的鲁棒性是专门重要的。
本文通过对两种操纵方式进行建模分析,对两种操纵方式的限流速度和操纵稳固性进行了比较,并通过实验得到了验证。
2两种操纵方式分析21并联式双环操纵方式这种操纵方式电路原理图如图1所示,使用两个并联的单环分不实现电路的恒压和恒流功能,电压环PI调剂器输出和电流环PI调剂器输出均通过一个二极管接到三角波比较器的正输入端,电路工作时,若电压环PI调剂器输出UV1小于电流环PI调剂器输出UC1,则DV1导通,电路工作在电压环操纵模式;反之DC1导通,电路工作在电流环操纵模式。
这种操纵方式下,在稳固工作时,电压环和电流环只有一个环在工作,可不能互相干扰。
而且单环操纵的设计和分析都相图1并联式双环操纵方式的电路原理图图2电压环单环操纵模式下的电路方框图图3电流环单环操纵模式下的电路方框图图4电压环单环开环波特图图5电流环单环开环波特图对简单。
基于电压电流双环控制的数字PFC电路设计研究
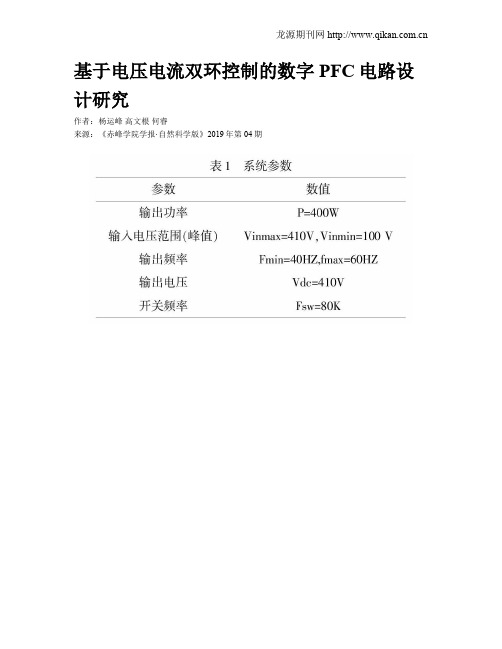
基于电压电流双环控制的数字PFC电路设计研究作者:杨运峰高文根何睿来源:《赤峰学院学报·自然科学版》2019年第04期摘要:设计了一种基于TMS320F28335型DSP处理器的电压电流双环控制的数字PFC电路,重点研究了电压电流双闭环数字控制回路的设计,给出了具体PI参数计算例程,最后在Matlab/Simulink中建立了该双闭环控制系统的仿真模型,并对其结果进行了研究分析.关键词:数字PFC;双环控制;PI参数中图分类号:TM13;TM461; 文献标识码:A; 文章编号:1673-260X(2019)04-0024-04 引言传统的功率因数校正技术(PFC)主要通过模拟控制实现,该方法虽然成熟可靠但随着开关电源逐步朝着高頻化小型化发展,模拟控制方式带来的器件多,控制复杂等缺点逐渐显现[1-2].如今随着数字控制的不断发展,越来越多的电力电子装置开始使用数字处理器(DSP)控制方式,它具有体积小、控制外围电路简单、控制方式灵活等优点.TMS320F28335具有150MHz的高速处理能力,具备32位浮点处理单元,用户可快速编写控制算法而无需在处理小数操作上耗费过多的时间和精力,与前代DSP相比,平均性能提高50%[3].文章阐述了基于DSP的功率因数校正电路的原理,以Boost-PFC电路拓扑结构为例实现数字控制PFC电路的参数计算,元器件的选型,和作为数字实现功率因素最重要的环节即电压电流双环控制的PI参数整定,最后通过仿真验证了系统设计的准确性.1 数字PFC电路结构与工作原理该PFC电路的主要组成部分由以下几个部分组成,分别是单相桥式不控整流电路,单相Boost升压电路,DSP处理器构成的控制电路,以及信号调理与检测电路.PFC电路想要实现高功率因数它的基本思想是当交流电经过单相不控整流电路后得到的整流电压电流作为整个PFC 系统电路的输入电流电压,这个得到的电压电流经过后续的 Boost型DC/DC变换电路之后,通过在DSP中使用相应的控制方法使得该电路输入的电流信号能够自动的跟随输入电压信号,即实现了电压电流的相位同步,达到提高功率因数的目的,如果要使得输出直流电压很稳定则必须对的电路进行闭环控制.2 单相PFC的控制策略本次设计PFC电路采用电压电流双环控制模式,其具体工作过程如下:输出的参考电压信号Ud*和经过PFC电路之后的输出电压Ud信号两者送到一个电压PI控制器,经过PI比较处理环节得到的信号我们把它作为是电感电流的大小参考信号Vg,这个电流参考信号Vg与整流后的输入电压信号Vs经过一个乘法器,通过乘法器能够使电流获得与输入电压相同的相位,其中电压环PI控制器由于含有积分器有助于消除稳态误差,整流之后的输入电压信号主要能够为电流参考信号提供相位支持,使得电感电流能够得到与电压信号两者具有相同的相位(相位相同,幅值虽然不同可以通过后续的控制算法来调整)[4].而这个信号即作为为电流环的电流大小参考命令IL*,同时将采样后的真实的电感电流信号IL与电流参考信号IL*经过一个电流PI控制器环节后得到的比较信号与DSP控制器的PWM比较单元产生一定的频率相同但是占空比大小不同的PWM脉冲序列信号从而控制电路的开关管开通与关断,以此来不断地调整开关通断时间使得实现电流跟踪电压相位达到功率因数为1的目标.3 主电路参数设计计算由于在开关电源电路中电感占据最重要的地位,电感的设计也最为复杂,我们可以通过以下几个步骤来设计.3.1 确定电感的大小(1)首先确定输入电流峰值的最大值:当输入电压最小时,输入电流的峰值能达到最大值,同时考虑到电源效率为92%(PFC变换器及DC/DC变换器的效率分别为96%).(2)电感中纹波电流峰峰值.电感电流的峰峰值选取一般工程设计上取经验值,PFC电路的升压电感最大峰峰值可取PFC电路输入电流大小的20%.(3)计算占空比当输入的电流峰值最大时的占空比为:(4)计算电感量:根据以上公式可以并确定电感量为1.2mH.3.2 输出电容的选择PFC Boost电路的整流输出电压为2倍工频纹波,其纹波大小由输出电流和输出电容Co 决定,一般来说根据3W选取的原则即PFC输出功率的3倍值来选取输出电容的大小,通过计算可以取输出电容Co=1000μF.3.3 功率开关管的选择由于在本电路设计中PFC变换器的开关管开关频率设定为80KHz,所以功率开关管类型选择MOSFET.且此开关管的耐压值要大于PFC电路的输出电压,至少留有1.5倍电压裕量,开关管的额定电流大于PFC电感电流并且留有1.5倍的安全裕量.3.4 快恢复二极管的选择开关管关断时会使得二极管承受极高的反向电压,为了防止二极管被这个反向电压击穿所以在选择二极管时要考虑到快恢复特性,防止大的灌电流对开关管造成损坏二极管要承受反向输出电压故其额定电压要大于电路的输出电压,输出电流为1.5的电感电流IL裕量左右.4 控制回路设计在PFC数字控制回路中包含了两个环路;其中内环构成了电流环,PFC的电流内环的两个输入是经过电压外环之后的参考电流信号IACref和实际检测到的电感电流的信号IAC.其中电流环通过电流PI控制器的作用产生控制输出信号与DSP内部比较单元发生比较后得到控制开关管开通与关断的频率相同占空比不同的PWM脉冲信号,通过电流环的调节作用这样使得实际的电感电流IAC能够跟随参考电流IACref[5].与电压环相比,由于作为PFC电流内环,故其电流环应具有较快的响应速度,使之能够快速的让输入电流信号跟踪输入电压信号的相位,所以PFC电流内环的带宽应更高,这样才能准确无误的跟踪两倍于输入电网电压频率的半正弦波形.上图中外环构成PFC电路的电压环,其中电压外环的两个输入信号分别是用户输入参考电压信号VDCref和检测到的PFC输出直流电压信号VDC.电压PI控制器用于通过比较计算后产生控制输出误差信号,这样无论PFC输出端的负载电流IO和输入端电网的供电电压VAC 发生怎样的变化,其输出端直流母线电压VDC都将通过电压环的反馈调节从而保持稳定.由电压PI控制器产生电压误差控制信号作为电流内环的参考信号IACref.4.1 电流环PI控制器设计在本次PFC功率因数校正电路设计中设计电流环控制器时其电流环带宽选择8K,这样电流能够较好的跟踪经过整流电路之后的频率为100Hz或者120Hz的半波正弦输入电压,根据到单片机在进行数字采样计算时会有延时误差等数字延时的考虑,故在这里对PFC电流PI控制器的“零点”进行配置,因此对于相位交点频率为8kHz情况,电流环“零点”配置在远小于该频率处以避免数字延时,故本文中电流PI控制器的零点选择800Hz.在设计电压电流环路时需要确定框图中K1K2K3的系数,计算公式给出如下:4.2 电压环PI控制器设计在开关电源等电路设计时,我们在设计电压环控制器时电压环带宽一般选择为电网电压频率的1/10,在本设计中由于整流之后電网电压频率为100Hz,所以在这里我们选择电压环的带宽为10Hz,在该处此时电压环的带宽远小于100Hz或120Hz的电网电压输入频率,这样做的好处是能够明显的消除直流母线电压中的谐波干扰,对于提高系统稳定性有极大的帮助.在设计电压PI控制器的零点时选择其与电压环的带宽相同,考虑到单片机在采样时会有延时,所以在电压环带宽为10Hz时数字延时不是那么明显.有利于保证采样的准确性.其中Zfcv为负载的输出等效阻抗,该负载输出阻抗等效了PFC电路输出滤波电容,PFC 输出负载阻抗的两者并联组合,通过等效负载输出阻抗参数来反应电压环的精确性.5 系统仿真本文通过在MATLAB仿真软件上针对以上算法进行了仿真,PFC电路交流输入为220V,峰值输入电压为90V-265V,电压频率为工频50Hz,开关管的开关频率为80kHz,实验仿真如以下图,图5显示的是电路经过PFC后可以看出电流能够跟踪电压相位,使得功率因数接近于1达到了设计的目的.图6显示的是输出电压波形,其值大小稳定在410V,符合设计要求.6 结论本设计针对目前模拟控制方式PFC电路的各种缺点,提出了一种基于DSP数字控制方式的PFC电路的主电路参数设计以及控制回路的PI参数设计,最后通过仿真验证了设计的可行性.参考文献:〔1〕王跃林,申群太.基于DSP数字控制的Boost-PFC系统的设计[J].通信电源技术,2007,24(6):73-75.〔2〕文雪峰,佃松宜,邓翔.基于数字双环控制的功率因数校正控制算法[J].电力系统自动化,2014,38(3):36-40.〔3〕丁凯.基于DSP的三电平PWM整流器的控制策略研究[D].东南大学,2015.〔4〕陈倩玉.ZVS半桥三电平充电机控制策略研究和实现[D].电子科技大学,2016.〔5〕张亚州.浅谈有源功率因数的校正及有源滤波技术的研究[J].建筑工程技术与设计,2017(20).。
PFC的数字设计总结

(14)
所以
k K in K m 2 Ki K 2 ff Vin
(15)
求得
gc K m K in K2 ff K iVo
(16)
4.电压环和电流环补偿环节设计
采用模拟化的设计方法,先在 s 域分析设计,再转化为数字控制算法。
(1) 电流环的补偿设计
电流环是 PFC 设计的关键, 它通过调节功率开关管的占空比迫使输入电流跟 踪输入电压。由于输入电压是全波整流波形,含有丰富的谐波,电流环要有较好 的动态跟踪能力。因此,电流环要设计成具有较高的低频增益和较宽的带宽。
^
Vg
^
Vo
Gid(s)
d
^
IL
^
FM Ti Gci(s)
× +
^
Ki
-
Vc
Gcv(s)
图 4 电流环小信号模型 电流环的小信号模型如图 4 所示,其开环传递函数为
Ti ( s ) K i Gci ( s ) FM Gid ( s ) Ki
——电流环反馈系数
(17)
Gci ( s ) ——电流环补偿环节 FM
为了抑制电压纹波,输出电容通常选的比较大,在高频条件下 可以近似简化为
1 0 ,上式 sC
Vo ' G id ( s ) Ls 1 G 'g ( s ) i L in Ls v d 0
(6)
(2)电压环 Control-to-Out 传递函数 Gvc
——PWM 环节传递函数
Gid ( s ) ——主电路 duty-to-current 传递函数
采用 TI 公司的 DSP2407 作为数字控制器,其 AD 的参考电压是 3.3V,所以 先要将电感电流经过传感器,使输出电压在 3V 左右。电流环的反馈系数是传感 器的增益和 AD 增益的乘积。同样道理,可以 求出前馈电压系数和电压环反馈 系数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制电路设计
一、电流环的设计
电流环的设计核心是控制主电路上电感电流的平均值,使它处于稳定状态,根据主电路与设计思路得电流控制环的系统框图如下:
其中Vcv 为电压环的输出电压(即系统的参考电压),Vs 为锯齿波的幅值,IL 为电感上的电流,K1为采样的放大倍数。
设置PI 为单零点—单极点补偿网络。
如下图所示:
因为系统的开关频率为100KHZ ,为了避免开关频率对控制环路的影响,穿越频率fci 必须远远小于开关频率,当然为了对系统动态响应的速度,我们希望fci 越大越好,在一般的开关电源中,fci 都小于开关频率的1/10,此处我们设置为开关频率的1/10,即10KHZ 。
补偿网络的传递函数为:211111()R C S G s R C S
+= , 由系统框图可以得系统的开环传递函数为:21211(1)11()1S R C S G S K R C S V SL
+=, 式中:Vs=5V ;L=15uH; K1=1/100; S=jw;代入上式,当fci=10KHz 时,2()G S =1,令补偿零点角频率1211w R C =
在fci/2处,即1211w R C ==5KHz ,经计算得11R C =62.710-⨯,21R C =4210-⨯,所以21
R R =74,令1R =1K ,得2R =74K ,1C = nf, 代入得开环传递函数为:2245000()/10
S G S S -+=
,经MATLAB 画出BODE 图如下: 从上图可以看出,在(1/2)fci 频率处,开环传递函数的斜率由-40dB 变成-20dB ,可以达到较快的动态响应,由于传递函数以-20dB 的斜率穿越0dB
线,也可以获得足够的相位裕量(64度)。
同时由于从0Hz~(1/2)fci 之间,开环传递函数以-40dB 斜率衰减,可以获得很高的静态增益,从而使得静态误差非常的小。
根据乃奎斯特环路稳定性判据,系统是稳定的,设计也合理。
二、电压环的设计
在电压环的设计中,电流环可视为控制对象的一个环节,因此先得求取电流控制环的闭环传递函数,由前面的电流控制环的开环传递函数2245000()/10S G S S -+=得闭环传递函数为:3245000()/105000
S G S S S -+=++,同理MATLAB 得其BODE 图如下:
根据该闭环传递函数的BODE 图,为了便于分析我们用传递函数441()1/10
G S S =+近邻代替它来处理,4()G S 的BODE 图如下所示: 再根据整个电路,可以得电压环控制系统的构图如下 :
框图中Vref 为系统给定电压(),CA 电流环控制单元,K2为输出电压采样放大倍数,Vo 为输出电压,1/SC 为输出阻抗。
PI 调节器采用与电流环结构一样的单极点—单零点补偿网络,如下图所示:
由于在fci 以下,电流环增益为1,相位为0,在电压环的设计中,电流环为单位1,为了使整个系统得到较高的中频带宽,设电压环的穿越频率fcv=1KHz,电压环PI 补偿零点角频率242
1w R C =
=(1/2)fcv,设计方法与电流环的设计一样:
在f<fci 下,系统的传递函数为:42532(1)1()2R C S G S K R C S SC +=, 其中K2=12=1/,C=4700uf, S=jw ,当fcv=1KHz 时,5()G jw =1,代入计算得
42R C =1/500,32R C =59.9110-⨯,所以43
R R =20,取3R =1K ,4R =20K ,2C =,将计算结果代入523500()/(1.1210)
S G S S -+=⨯,得BODE 图如下: 由此得出的结果与电流环控制环类似,系统是稳定的。
当f>fci 时,把整个电流环加入系统中,得整个电压环的开环传递函数为: 6234
5001()/(1.1210)1/10S G S S S -+=⨯+,得到BODE 图如下: 由整个BODE 图可知,系统在0—500Hz 时以-40dB 斜率下降,具有较高的静态增益,从而使得静态误差非常的小,在(1/2)fcv(500Hz)频率处,开环传递函数的斜率由-40dB 变成-20dB ,并以-20dB 的斜率穿越0dB 线,可以获得足够的相位裕量58度。
当f>fci 时,开环传递函数的以-40dB 斜率下降,从而系统有较大的抗干扰能力。