矢量控制中电流环和速度环PID参数设计指南
pid参数设置方法
pid参数设置方法(原创实用版3篇)目录(篇1)1.PID 参数的概念与作用2.PID 参数的设置方法3.PID 参数的调试与优化4.PID 参数的应用实例正文(篇1)一、PID 参数的概念与作用PID(Proportional-Integral-Derivative,比例 - 积分 - 微分)参数是一种广泛应用于工业控制系统的闭环控制算法。
PID 算法通过计算偏差值(期望值与实际值之间的巟值)的比例、积分和微分值,然后对这三者进行加权求和,得到控制器的输出,从而实现对被控对象的调节。
PID 参数分别对应着比例、积分和微分控制器的增益,它们的设置直接影响到控制系统的性能。
二、PID 参数的设置方法1.试错法:通过不断尝试不同的 PID 参数组合,观察控制系统的响应,逐步优化参数设置。
试错法适用于参数变化范围不大的情况,但需要耗费较多时间和精力。
2.Ziegler-Nichols 方法:通过绘制 PID 参数与系统响应的关系曲线,找到使得系统达到临界振荡的参数组合,然后根据实际需求调整参数。
Ziegler-Nichols 方法适用于参数变化范围较大的情况,但需要专业技能和设备。
3.软件自整定法:利用控制软件内部的算法,根据系统的实时响应自动调整 PID 参数。
软件自整定法适用于参数变化范围较大的情况,但需要较高计算能力和实时性。
三、PID 参数的调试与优化1.调试:在控制系统运行过程中,观察系统响应,检查 PID 参数设置是否合理。
如有异常,需要及时调整参数。
2.优化:根据实际运行情况,对 PID 参数进行调整,以提高系统性能。
优化过程中要兼顾比例、积分和微分控制器的作用,避免过度调整导致系统不稳定。
四、PID 参数的应用实例1.温度控制系统:通过调节加热器的功率,控制温度在一定范围内波动。
2.速度控制系统:通过调节电机的转速,控制机械运动的速度。
3.液位控制系统:通过调节阀门的开度,控制液体的流量,保持液位在一定范围内。
电机pid 电流环

电机pid 电流环(实用版)目录1.电机 PID 控制的基本概念2.电流环在电机 PID 控制中的作用3.电流环的控制方法及参数调整4.电流环在实际应用中的优缺点正文一、电机 PID 控制的基本概念电机 PID 控制是一种广泛应用于电机调速的控制方法,它通过比例(P)、积分(I)和微分(D)三个环节的组合,对电机的电流、转速等参数进行调节,以实现精确、稳定的控制效果。
其中,比例环节用于根据偏差大小调整控制量;积分环节用于消除系统的静差;微分环节则用于预测系统的变化趋势,从而减小系统的超调量。
二、电流环在电机 PID 控制中的作用在电机 PID 控制中,电流环是其中一个重要的环节。
它的主要作用是控制电机的电流,以保证电机在不同负载和转速下的稳定运行。
电流环通过比较实际电流与给定电流的差值,计算出调整后的电压,进而驱动电机。
三、电流环的控制方法及参数调整电流环的控制方法主要包括开环控制和闭环控制两种。
开环控制是指根据预设的电流值直接控制电机,不考虑实际电流的大小,适用于对电机电流要求不高的场合。
闭环控制则是根据实际电流与给定电流的差值进行调节,能够实现更精确的电流控制,但需要配备电流检测装置。
在参数调整方面,电流环的参数主要包括比例系数、积分时间和微分时间。
比例系数决定了电流环对偏差的响应速度,积分时间则影响电流环对静差的消除能力,微分时间则决定了电流环对系统变化的预测能力。
在实际应用中,需要根据具体工况和需求合理调整这些参数,以获得最佳的控制效果。
四、电流环在实际应用中的优缺点电流环在实际应用中具有以下优点:1.控制精度高:通过比例、积分、微分三个环节的组合,能够实现对电机电流的高精度控制。
2.系统稳定性好:电流环能够自动调节控制量,使电机在各种工况下都能保持稳定运行。
3.适应性强:电流环能够适应不同类型的电机,满足不同场合的需求。
然而,电流环也存在一些缺点:1.参数调整较为复杂:需要根据具体工况和需求调整比例系数、积分时间、微分时间等参数,过程较为繁琐。
foc(电机矢量控制)程序分块细解

foc(电机矢量控制)程序分块细解下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!电机矢量控制(FOC)是一种用于控制交流电机的先进技术,它能够精确控制电机的速度和位置,提高电机的效率和性能。
基于模糊PI的永磁同步电机矢量控制算法

79智慧工厂│SMART FACTORY│基于模糊PI的永磁同步电机矢量控制算法A Fuzzy Predictive Control Algorithm in the Permanent Magnet Synchronous Motor Vector Control• 南京铁道职业技术学院 杨飏 Yang Yang 顾建凯 Gu Jiankai摘 要:在永磁同步电机的矢量控制中,速度环和电流环存在动态响应不足、PI参数难以调整等问题。
通过对模糊PI算法深入研究,本文设计了一种模糊PI控制器,取代了传统的速度环PI控制器,仿真结果表明,采用模糊PI控制器的永磁同步电机调速响应更快,同时具备更好的动静态性能和抗干扰能力,体现该方案的可行性和正确性。
关键词:永磁同步电机 矢量控制 模糊PIAbstract:In the vector control of permanent magnet synchronous motor, the velocity loopand the current loop have insufficient dynamic response, PI parameter is difficult to adjustand so on. In this paper, a fuzzy PI controller is designed to replace the traditional speed loopPI controller. The simulation results show that the permanent magnet synchronous motorwith fuzzy PI controller is faster and has a faster response speed. Better dynamic and staticperformance and anti-interference ability, to mention the feasibility and correctness of theprogram.Key words:PMSM Vector Control Fuzzy Control【中图分类号】TP273+.4【文献标识码】A 文章编号1606-5123(2017)04-0079-031 引言随着磁性材料以及电力电子技术的发展,永磁同步电机广泛的被使用在各种传动设备中。
基于foc矢量控制的无刷直流电机控制器设计
基于foc矢量控制的无刷直流电机控制器设计文章标题:基于FOC矢量控制的无刷直流电机控制器设计探索序无刷直流电机(BLDC)在各种应用中都得到了广泛的应用,由于其高效率、低噪音和低维护要求,成为了许多行业的首选。
在BLDC电机的控制中,FOC矢量控制技术已经成为了一种重要的控制方法。
本篇文章将全面探讨基于FOC矢量控制的无刷直流电机控制器设计的相关内容,旨在帮助读者更深入地理解这一技术并应用于实际项目中。
一、FOC矢量控制技术的概述在介绍基于FOC矢量控制的无刷直流电机控制器设计之前,首先我们需要了解FOC矢量控制技术的概念和原理。
FOC矢量控制是一种通过控制电机的电流和转子磁通实现对电机的高效、精准控制的技术。
在FOC矢量控制中,通过对电机的三相电流进行精准控制,可以实现电机的高效运行,降低能耗和提高性能。
1. FOC矢量控制的基本原理在FOC矢量控制中,电机的三相电流被分解为两个独立的分量:一个是沿着磁场转子磁通方向的磁通分量,另一个是与磁场垂直的转子电流分量。
通过对这两个分量进行独立控制,可以实现对电机的高精度控制,达到最佳的运行效果。
2. FOC矢量控制的优势相较于传统的直接转矩控制(DTC)技术,FOC矢量控制具有更高的控制精度和动态响应,能够更好地适应各种工况下的控制需求,对电机能效比提升和转矩波动降低等方面有着显著的优势。
二、基于FOC矢量控制的无刷直流电机控制器设计基于FOC矢量控制的无刷直流电机控制器设计是一个复杂而又具有挑战性的工程项目。
在设计过程中,需要考虑到电机的参数识别、闭环控制算法、硬件设计等多个方面的内容。
1. 电机参数识别在进行FOC矢量控制器设计之前,首先需要对电机进行参数识别。
这包括电机的定子电感、磁通链路和电阻等参数的准确测量和识别,这些参数的准确性将直接影响到FOC矢量控制的效果。
2. 闭环控制算法针对FOC矢量控制的无刷直流电机控制器设计,闭环控制算法是非常关键的一部分。
永磁同步电机矢量控制环路设计

永磁同步电机矢量控制环路设计一、概述永磁同步电机是一种性能优越、效率高、体积小的电机,广泛应用于工业生产和家用电器中。
矢量控制技术是提高永磁同步电机性能的关键技术之一。
本文将围绕永磁同步电机矢量控制环路设计展开讨论。
二、永磁同步电机矢量控制基本原理永磁同步电机矢量控制是通过对电机定子和转子磁链定向控制,实现电机电流和电压的精准控制,从而实现电机速度和转矩的精确调节。
1. 电机数学模型永磁同步电机的数学模型可以用d-q坐标系描述,其数学模型如下:$u_d=Ri_d+\frac{d\lambda_d}{dt}-\omega\lambda_q$$u_q=Ri_q+\frac{d\lambda_q}{dt}+\omega\lambda_d$$\frac{d\lambda_d}{dt}=-\frac{p}{L_d}\lambda_d+u_d-Ri_d$ $\frac{d\lambda_q}{dt}=-\frac{p}{L_q}\lambda_q+u_q-Ri_q$ $\lambda_d=L_di_d$$\lambda_q=L_qi_q$其中,u_d、u_q为电机的d轴和q轴输入电压,i_d、i_q为电机的d 轴和q轴电流,$R$为电机的电阻,$L_d$和$L_q$为电机的d轴和q轴电感,$\lambda_d$、$\lambda_q$为电机的d轴和q轴磁链,$\omega$为电机的转子速度。
2. 矢量控制基本原理矢量控制通过对电机定子和转子磁链进行定向控制,分别控制d轴电流和q轴电流,从而实现对电机的速度和转矩精准控制。
具体而言,矢量控制需要经过磁链观测、转子位置估计、坐标变换、电流控制等步骤。
三、永磁同步电机矢量控制环路设计永磁同步电机矢量控制环路设计包括电流环和速度环两个部分。
1. 电流环设计电流环主要实现对d轴和q轴电流的精确控制,保证电机的磁链定向和电流大小。
电流环的设计需要考虑电机的动态特性和稳态特性,以及控制器的实现效率和稳定性。
矢量控制中电流环的实现方式
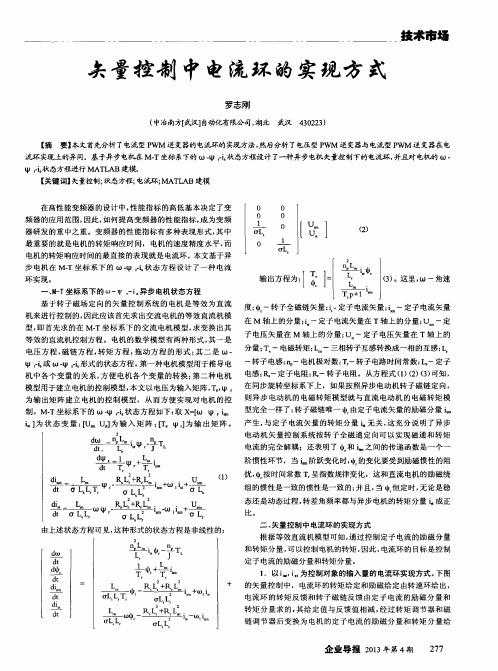
由上 述 状 态 方 程 可 见 , 这 种 形 式 的状 态 方 程 是 非 线 性 的:
d t o dt d d t d i d t di dt
二、 矢 量 控 制 中 电流 环 的实 现 方 式
根据等 效直 流机 模型可知, 通过控制定子 电流的励磁分量 和转矩 分量 , 可 以控制 电机 的转矩 , 因此 , 电流 环的 目标是控制
阶惯性环节 ,当 i 立 n 阶跃变化时, , 的变化要受到励磁惯性 的阻 扰, 按时间常数 T 呈指数规律变化 ,这 和直流 电机的励磁绕
组 的惯 性 是 一 致 的 惯 性 是 一致 的 ; 并且, 当 恒 定 时 , 无 论 是 稳
=
+ Or a n
态还是动态过程 , 转差角频率都与异步 电机 的转矩 分量 i 成 正
一
一定 子 电阻 ; &一 转 子 电阻 。 从方 程 式 ( 1 ) ( 2 ) ( 3 ) 可知 , 机 中各个变 量的关系 , 方便 电机各个 变量 的转换 ; 第二种 电机 电感 : 在 同步旋转坐标 系下上,如果按照异步 电动 机转子磁链定 向, 模型用于建立 电机 的控制模 型, 本文 以电压 为输入矩 阵, ] r e , 为 输 出矩 阵 建 立 电机 的 控 制 模 型 ,从 而 方 便 实 现 对 电机 的 控 则异 步 电动机 的 电磁转 矩模型就 与直流 电动机 的 电磁 转矩模 型完全一样 了; 转 子磁链唯一 , 由定 子电流矢量 的励磁分量 制 。M. T坐 标 系 下 的 ∞ , i 。 状态方程如下: 取 X= [ o t t l J i 】 为 状态 变 量 : [ U
定 子 电 流 的励 磁 分 量 和 转 矩 分 量 。 1 .以 i , i 为 控 制 对 象 的输 入量 的 电流 环 实 现 方 式 。 下 图
sltx无刷电机矢量控制器参数
一、概述随着工业自动化的发展和电动汽车的普及,无刷电机作为一种高效、可靠、具有良好控制性能的驱动器件,得到了广泛的应用。
而无刷电机的性能优劣直接受到矢量控制器参数的影响。
本文将针对无刷电机矢量控制器参数进行探讨。
二、矢量控制器参数的作用1. 控制器增益参数:用于调节电流环和速度环的响应速度,增益参数过大容易引起系统震荡,过小则容易使系统失稳。
2. 调速环比例、积分系数:用于调节速度环的静态误差和动态响应特性,参数设置不当将影响电机的速度控制性能。
3. 空间矢量调制参数:影响电机的输出电压波形,直接影响电机的输出扭矩和效率。
4. 调制方式:影响电机的工作效率和转矩波动,常见的调制方式有正弦波调制、空间矢量脉宽调制等。
5. 限流、限压参数:用于限制电机的最大电流和电压,防止电机过载和损坏。
三、参数调试方法1. 根据电机的特性曲线和设计要求,选定合适的增益参数,并通过试错法进行调试,观察系统的响应性能。
2. 根据电机的动态特性和稳态误差要求,调节速度环的比例、积分系数,使系统达到理想的速度控制性能。
3. 通过仿真软件进行空间矢量调制参数的优化,得到最佳的输出电压波形和电流波形。
4. 根据电机的额定电流和电压,调节限流、限压参数,保护电机不受过载和过压的影响。
5. 对不同的调制方式进行对比实验,选定最适合电机特性的调制方式。
四、参数优化策略1. 结合实际应用场景,选择合适的控制器增益参数和调速环参数,使系统具有良好的鲁棒性和响应性能。
2. 采用先进的控制算法和优化方法,对空间矢量调制参数进行精确调优,提高电机的效率和动态响应性能。
3. 根据电机的负载特性和工作环境,合理选择限流、限压参数,使电机在各种工作条件下都能稳定可靠地工作。
五、实例分析以某款无刷电机为例,通过实际调试和优化,得到了一组最优的矢量控制器参数。
该电机在低速大扭矩和高速稳定性能下都表现出色,具有良好的效率和动态响应性能。
六、结论矢量控制器参数对无刷电机的性能具有重要影响,通过合理选择和优化参数,可以使电机在不同工况下都能获得良好的控制性能和工作稳定性。