+PLC的步进顺控指令系统
PLC步进指令及顺控程序设计

【练习】机械手臂控制系统
①工件的补充使用人工控制,可直接将工件放在D点(LS0动)。
控制说明:
②只要D点有工件,机械手臂即先下降(B缸动作)将工件抓取(C缸动作)后上升(B缸复位),再将工件搬运(A缸动作)到E点上 方,机械手臂再次下降(B缸动作)后放开(C缸复位)工件,机械手臂上升(B缸复位),最后机械手臂再回到原点(A缸复位)。
任务实施
运料小车的控制程序
操作步骤
(1)将编好的运料小车控制程序写入PLC。 (2)使PLC处于运行状态,并进入程序监控状态。 (3)模拟运料小车工作过程。 a.原料卸在A处:X0 = 1,X2 = 1,按下运行按钮X1,Y0灯亮,模拟小车右行;断开X2,接通X3,延时20s后Y1灯亮,模拟小车左行;接通X2,程序返回S0状态,小车停止。 b.原料卸在B处:X0 = 0,X2 = 1,按下运行按钮X1,Y0灯亮,模拟小车右行;断开X2,接通X3,状态无变化;接通X4,延时20s后Y1 灯亮,模拟小车左行;接通X2,程序返回S0状态,小车停止。 (4)在模拟运料小车运行过程中,使PLC处于程序停止状态,小车停止运行。再次使PLC处于程序运行状态,小车保持原方向继续运行。
本章小结
四、步进顺序控制程序设计注意事项 1、跳转程序设计 向下面状态的直接转移或向系列外的状态转移被称为跳转,用箭头符号指向转移的目标状态。
图3-28 跳转程序设计
2、选择分支流程不能交叉 选择分支流程不能交叉,如图所示,对左图所示的流程必须按右边所示的流程进行修改。
3、并行分支与汇合流程中,并联分支后面不能使用选择转移条件※,在转移条件*后不允许并行汇合,如图中 (a)所示,应改成图 (b)后,方可编程。
例:部件分拣PLC控制
第五章 PLC的步进顺控指令系统
OUT Y 3 STL S 24
OUT Y STL STL S S
OUT Y
OUT Y 4
连续用STL 表示并行会合
当转换条件X1接通时,由状态器521分两路同时 进入状态器522和S24,以后系统的两个分支并 行工作。图5-8中水平双线强调的是并行工作, 实际上与一般状态编程一样,先进行驱动处理, 然后进行转换处理,从左到右依次进行。当两 个分支都处理完毕后,S23、S25同时接通,转 换条件X4也接通时,S26接通,同时S23、S25自 动复位。多条文路汇合在一起,实际上是STL指 令连续使用(在梯形图上是STL接点串联)。STL 指令最多可连续使用8次,即最多允许8条并行 支路汇合在—起。
第三节 选择性分支与汇合及其编程
一、选择性分支与汇合的特点
从多个分支流程 中选择某一个单 支流程,图。
分支选择条件X1和X4不能同时接通。在状态器 S2l时,根据X1和X4的状态决定执行哪一条分 支。当状态器S22或S24接通时,S2l自动复位。 状态器S26由S23或S25置位,同时,前一状态 器S23或S25自动复位。
下面以图5-2所示的机械手为例,进一步说 明状态转移图。机械手将工件从A点向B点移 送。机械手的上升、下降与左移、右移都是 由双线圈两位电磁阀驱动气缸来实现的。抓 手对物件的松开、夹紧是由一个单线圈两位 电磁阀驱动气缸完成,只有在电磁阀通电时 抓手才能夹紧。该机械手工作原点在左上方, 按下降、夹紧、上升、右移、下降、松开、 上升、左移的顺序依次运行。它有手动,自 动等几种操作方式。
图5-l是一个简单状态转 移图实例。状态器用框 图表示。框内是状态器 元件号,状态器之间用 有向线段连接。其中从 上到下、从左到右的箭 头可以省去不画,有向 线段上的垂直短线和它 旁边标注的文字符号或 逻辑表达式表示状态转 移条件。旁边的线圈等 是输出信号。
PLC步进顺序控制指令
功能图和梯形图的转换
在将顺序功能图转换为步进梯形图时,应遵循从左到右、 在将顺序功能图转换为步进梯形图时,应遵循从左到右、 从上到下的原则。注意步进梯形图应以RET指令结束。 RET指令结束 从上到下的原则。注意步进梯形图应以RET指令结束。
转移条件
重庆市技能人才培训集团
功能图和梯形图的转换
重庆市技能人才培训集团
步进指令的梯形图表示 步进指令的
重庆市技能人才培训集团
步进指令的功能图表示
上述步进梯形图也可以用顺序功能图(状态转移图)表示: 上述步进梯形图也可以用顺序功能图(状态转移图)表示:
转移条件
状态转移图中的每一步包含三个内容:本步驱动的内容、 状态转移图中的每一步包含三个内容:本步驱动的内容、 转移条件及指令的转换目标。 转移条件及指令的转换目标。
重庆市技能人才培训集团
步进顺序控制指令
FX 系列 PLC 提供了下面一对步进指令: 提供了下面一对步进指令:
STL是利用内部软元件(状态S)在顺控程序上进行 是利用内部软元件(状态 ) 是利用内部软元件 步进控制的指令 的指令。 步进控制的指令。 RET是用于状态(S)流程的结束,实现返回主程序 是用于状态( ) 流程的结束, 是用于 状态 母线)的指令。 (母线)的指令。
重庆市技能人才培训集团
步进控制指令的使用
4. 输出的驱动方法
如右图所示, 如右图所示 , 在状态内 指令写入后, 的母线将 LD 或 LDI 指令写入后 , 对不需要触点的驱动就不能 对不需要触点的驱动就 不能 再编程, 再编程 , 需要按下图方式进 行变换。 行变换。
或
重庆市技能人才培训集团
步进控制指令的使用
5. 状态的转移方法
三菱PLC----步进顺控指令系统
5.1 状态转移图
有向连线(状态转移路线和方向): 从上到下、从左到右 的步间连线,或非前两方向则为加箭头的步间连线。 注:从上到下,从左到右有向连线上的箭头可省略。 转换(分割两个相邻步):有向连线上与其垂直的短线。
转换条件:与转换相关的逻辑条件,用文字、布尔代数表达 式、图形符号标于转换短线旁。
步3
步4
c
步10
步11
26
5.4 编程实例
绘制顺序功能图的注意事项:
两个步绝对不能直接相连,必须用一个转换将它们隔开; 两个转换绝对也不能直接相连,必须用一个步将它们隔开; 顺序功能图中的初始步一般对应系统的等待启动的初始状态 (如M8002) ; 自动控制系统应能多次重复执行同一工艺过程(封闭地循环扫 描运行); 在单序列中,只有当某一步的前级步是活动步时,该步才可能 将变成活动步。
成立,则下一步被激活。同时所有 前级步都变为不活动步了。
g
步10
h
22
5.3.4 选择与并行分支的组合
M8002 S0
X0
S20
Y1
X 1
S22
Y3
X4
S23
Y4
X5
S24
Y5
X7
S27
Y10
X10
X2
S20
Y1
X3
S25
Y6
X6
S26
Y7
23
5.3.4 选择与并行分支的组合
M8002
S0
X0
X2
S2
初始状态
XO 启动
S20
Y0
X1 下限位
S21
Y1
X2 已加紧
S22
Y2
X3上限位
第四章 步进顺控指令及其应用
(1)I/O分配 X0:自动/手动转换 X1:右限位 X2:第二槽限位 X3:第三槽限位 X4:左限位 X5:上限位 X6:下限位 X7:停止 X10:自动位起动 X11:手动向上 X12:手动向下 X13:手动向右 X14:手动向左
Y0:吊钩上 Y1:吊钩下 Y2:行车右行 Y3:行车左行 Y4:原点指示
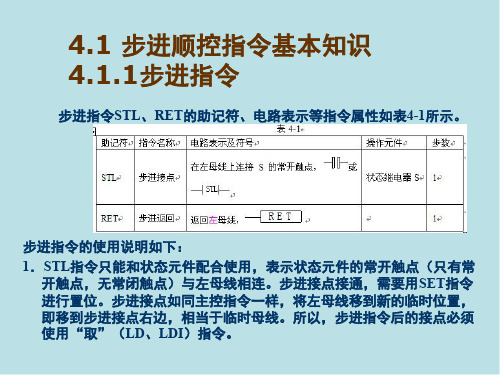
二、步进返回指令 RET指令用于返回主母线。使步进顺控程序 执行完毕时,非状态程序的操作在主母线上完成 ,防止出现逻辑错误。状态转移程序的结尾必须 使用RET指令
步进接点只有常开 触点,没有常闭触点。 步进接通需要SET指令 进行置1,步进接点闭 合,将左母线移动到临 时左母线 在每条步进指令后不必 都加一条RET指令,只需 在连续的一系列步进指令 的最后一条的临时左母线 后接一条RET指令返回原 左母线,且必须有这条指 令。
4、一些规则 步和步之间必须有转移隔开。 转 移和转移之间必须有步隔开。 步与转移,转移 与步之间有向线段连接,正常画SFC图的方向是 从上向下或是从左向右,按照正常顺序画图时 ,有向线段可以不加箭头,否则必须加箭头。 一个SFC图中至少有一个初始步。
二、状态继电器
在状态转移图中,每个状态都分别采用连续 的、不同的状态继电器表示。FX系列PLC的状态 继电器的分类、编号、数量及功能
转移到第一并行分支状态
转移到第二并行分支状态
转移到第三并行分支状态
2、选择性汇合
STL S22 OUT Y2 输出处理
STL S22 LD X2 SET S50
从第一分支转 移到汇合点
STL S32 OUT Y12 输出处理
STL S32
LD X12
SET S50
从第二分支转 移到汇合点
PLC步进顺序控制指令
或
重庆市技能人才培训集团
步进控制指令的使用
5. 状态的转移方法
OUT 指令与 SET 指令对 于STL指令后的状态具有同 样的功能,都将原来的状态 自动复位。此外,还有自保 持功能。但是,在使用 OUT 指 令 时 , 用 于 向 状 态 转移图中的分离状态转移。
重庆市技能人才培训集团
顺序功能图的类型
条件:T1 触发 状态:Y3 置1 ④ 高速状态
~
可使Y4、Y5复位 条件:T2 触发
状态:Y4、Y5 置1 ( 2 )低、中、高速 X0 均可使 Y1~Y5复位 高速时X2可使Y4、Y5复位
状 态 转 移 图
步进控制指令的使用
使用注意事项
用步进指令可以将顺序功能图转换为步进梯形图,也可 以直接编写步进梯形图。对梯形图和顺序功能图应注意以下 几点:
重庆市技能人才培训集团
步进顺序控制指令
2. RET指令
功能:表示该步进控制结束,返回主程序 (母线)。每个步进程序应在 END 指令前写入 一次RET指令。
无论在什么条件下,一旦切换动作状 态,则转移前的源状态自动变为断开状 态,不再被激活。
重庆市技能人才培训集团
步进指令的梯形图表示
重庆市技能人才培训集团
重庆市技能人才培训集团
顺序功能图的类型
一、单流程结构
从头到尾只有一条路可走,称为单流程结构。 如红绿灯控制程序,虽然是循 环控制,但都以一定顺序逐步执行 且没有分支,所以属于单一顺序流 程。 图中在S21执行完后即结束。 在步进阶梯图中,以复位 ( RST )正在执行的步阶来结束步 进动作。
说 说明 明ห้องสมุดไป่ตู้
(1)该控制系统有4个状态 ① 送电准备状态 条件:M8002 脉冲
PLC应用技术第4章 步进顺控指令的应用
X0 Y0 S20
X1 X2 X3 S21 S22 S23
S20
Y0
STL
X1
SET S21
X2
SET S22
X3
SET S23
STL S20
OUT Y0
LD
X1
SET S21
LD
X2
SET S22
LD
X3
SET S23
(a)顺序功能图
(b)梯形图
图4-2 选择序 列分支的编程方法示例
(c)指令表
(2)选择序列合并的编程方法
如果某一步的后面有N条选择序列的分支,则该步的STL触点开始的电路中应有N条 分别指明各转换条件和转换目标的并联电路。对于图4-2 中步S20之后的这三条支路有 三个转换条件X1、X2和X3,可能进入步S21、S22和步S23,所以在S20的STL触点开 始的电路块中,有三条由X1、X2和X3作为置位条件的串联电路。STL触点具有与主控 指令(MC)相同的特点,即LD点移到了STL触点的右端,对于选择序列分支对应的 电路的设计,是很方便的。用STL指令设计复杂系统的梯形图时更能体现其优越性。
SFC图便于阅读,也便于设计。SFC图也可以用STL 图(步进梯形图)来表示,如图4-1(b)所示,状 态步的线圈要用SET指令。其主控接点用STL指令, 主控接点右边为副母线。在SFC图结束后要用RET 指令,图4-1(c)所示为图4-1(a)和图4-1(b) 的指令程序。
高电PLC理论第4章步进顺控

第5章可编程控制技术第1节步进顺控指令介绍用梯形图或指令表方式编程固然广为电气技术人员接受,但对于一个复杂的控制系统,尤其是顺序控制程序,由于内部的联锁、互动关系及其复杂,其梯形图往往长达数百行,通常要由熟练的电气工程师才能编制出这样的程序。
另外,如果再梯形图上不加上注释,则这种梯形图的可读性也会大大降低。
近年来,许多新生产的PLC在梯形图语言之外加上了符合IEC1131-3标准的SFC (Sequential Function Chart)语言,用于编制复杂的顺控程序。
利用这种先进的编程方法,初学者也很容易编出复杂的顺控程序。
熟练的电气工程师用这种方法后也能大大提高工作效率。
另外,这种方法也为调试、试运行带来许多难以言传的方便。
IEC1131-3中定义的SFC语言编制的程序极易相互变换。
三菱的小型PLC在基本逻辑指令之外增加了两条简单的步进顺控指令(STL,意为Step Ladder),同时辅之以大量状态元件,就可以用类似于SFC语言的状态转移图方式编程。
5.1.1 状态转移图5.1.1.1 状态的功能要用继电器梯形图编制顺序控制程序需要有些经验,并且所编的复杂程序也难于读懂。
若机械动作用所谓状态转移图(或按英文直译为顺序功能图)表示,则编程就很方便。
称为“状态”的软元件是构成状态转移图的重要元素。
FX2n。
系列可编程控制器的软元件中有900点状态(S0~S899)可用于构成状态转移图。
其中S0~S19用作特殊目的,如S0~S 9称为初始状态,是状态转移图中的起始状态。
如图5—1中①状态S30有效时输出Y10,Y1l动作,程序等待转移条件X20动作。
②X20瞬时接通,动作状态就从S30向S31转移。
③S30转到S31,使Y10 OFF,Y12 ON。
SET 驱动的Y11保持接通。
图5—1件触点的逻辑组合(复杂的串联、并联)连接时也可用作转移条件。
②各种负载(Y、M、S、T、C)和功能指令可由“状态”的触点驱动,也可由各种元件触点的逻辑组合驱动。