船舶稳性 PPT课件
合集下载
船舶初稳性ppt课件
外力作用对船施加一个力矩—
倾斜力矩 – 倾斜力矩>船舶倾斜>水线位置发 生变化<重心与重量不变>排水体 积不变,但水下形状变化>浮心 位置发生变化>重心和浮心不再 位于同一铅垂线上>重力和浮力 形成一个力偶,这个力偶的矩称 作复原力矩 – 复原力矩通常记为MR
式中GZ称为复原力臂
» 复原力矩可能为正,也可能为负。 » 为正使船复原,为负加剧倾斜。
船舶倾斜后浮心的移动距离
如图示,船在正浮时的水线为WL, 排水体积为,横倾小角度后的水 线为W1L1。设V1、V2表示入水及出 水楔形的体积,g1、g2表示入水及出 水楔形的体积形心。由于V1=V2, 因此可以认为,船在横倾至W1L1时的 排水体积相当于把楔形WOW1这部分 体积移至楔形LOL1处,其形心则自 g2移至gl。 设船横倾后的浮心自原来的B点移至 B1点,利用重心移动原理,可以求得 浮心的移动距离为 且
由于V1=V2,故glo=g2o=g1g2/2,代入上式得:
» 上式右端V1g1o是入水楔形体积对于倾斜轴线0-0的静矩
在Φ为小角度时,tanΦ= Φ,故 积分式 为水线面WL的面积对于纵向中心轴 线0-0的横向惯性矩IT,因此 可见,浮心移动的距离BBl与横向惯性矩IT 、横倾角 Φ成正比,而与排水体积成反比.
稳性的分类和研究方法(2)
静稳性和动稳性 – 假若倾斜力矩的作用是从零开始逐渐增加, 使船舶倾斜时的角速度很小,可忽略不计, 则这种倾斜下的稳性称为静稳性。 – 若倾斜力矩是突然作用在船上,使船舶倾斜 有明显的角速度的变化,则这种倾斜下的稳 性称为动稳性。
稳性的分类和研究方法(3)
通常把稳性问题分为下面两部分进行讨论:
4章 船舶稳性(课堂PPT)

KH KG sin
42
形状稳性力臂KN曲线(稳性交叉曲线) (Cross curves of stability)
43
2、假定重心法求取GZ (Assumed center of gravity)
GZ
Ga Z a
GG a
sin
Ga Z a
(KG
KGa )sin
GaZa:假定重心形状稳性力臂
θ
L2
4
25
b b
l b
液面形状图
b1
l
l
l
F
b
b
b2
b1
A
l
r
a b
b a
b2
26
⑤减小自由液面影响的措施
设置水密纵隔壁
i
x
(n
ix 1)2
减少甲板上浪和存水,及时排出积水。 液体舱柜应根据实际情况尽量装满或排空。 航行中,应逐舱使用油水并尽量减少同时存在 自由液面的液舱数。 液体散货船装载货物时,尽量少留部分装载舱。 部分装载舱应选择舱室宽度较小的货舱。 保证液体舱柜内的纵向水密隔壁的完整性。
Pi 10%
GM GM2 GM1 (KM 2 KM1) (KG2 KG1)
GM
KM
KG
KM
(KG1
KG1 P Z P
)
GM KM P (KG1 Z )
P
37
GM KM Pi (KG Zi )
Pi
因为是少量载荷变动,所以通常装载状
态下载荷变化前后KM变化较小,则可以忽略
水平横移
tg P y
GM
M P
L1
θ
W
O
L
W1
G
lZ
42
形状稳性力臂KN曲线(稳性交叉曲线) (Cross curves of stability)
43
2、假定重心法求取GZ (Assumed center of gravity)
GZ
Ga Z a
GG a
sin
Ga Z a
(KG
KGa )sin
GaZa:假定重心形状稳性力臂
θ
L2
4
25
b b
l b
液面形状图
b1
l
l
l
F
b
b
b2
b1
A
l
r
a b
b a
b2
26
⑤减小自由液面影响的措施
设置水密纵隔壁
i
x
(n
ix 1)2
减少甲板上浪和存水,及时排出积水。 液体舱柜应根据实际情况尽量装满或排空。 航行中,应逐舱使用油水并尽量减少同时存在 自由液面的液舱数。 液体散货船装载货物时,尽量少留部分装载舱。 部分装载舱应选择舱室宽度较小的货舱。 保证液体舱柜内的纵向水密隔壁的完整性。
Pi 10%
GM GM2 GM1 (KM 2 KM1) (KG2 KG1)
GM
KM
KG
KM
(KG1
KG1 P Z P
)
GM KM P (KG1 Z )
P
37
GM KM Pi (KG Zi )
Pi
因为是少量载荷变动,所以通常装载状
态下载荷变化前后KM变化较小,则可以忽略
水平横移
tg P y
GM
M P
L1
θ
W
O
L
W1
G
lZ
船舶原理PPT讲义- 稳定性问题
L
' dF dF dF dF
L p ( x2 x1 ) xF 2 GM L
x1 A x2 A1 G G1 W1 B F p
dA
W
xF
L1 L
B1
dF
Chapter three: Initial stability
§3-5 The effect of weight movement on stability
M R GZ GM sin
Where GZ is the restoring arm, GM is the initial stability height。
+ MR
M
w
When the heeling angle is small,
sinф ≈ ф, therefore, the above formula can be written as:
Chapter three: initial stability
§3-2 Metacenter
水线面WL
W
o
y1
o
y1/2
W1
v 2 y2 o
y1
y2
L1
v1
dx
L
L
在等体积倾斜的情况下,出水楔形的体积和入水楔形的 体积必然相等,由此可得:
L/2 1 1 2 2 y dx y L / 2 2 1 L / 2 2 2 dx L/2
A1
p
L1
L
k
pl tg k / GM
船舶试验的原理
pl ZG ( Z B BM ) tg
Chapter Three: Initial stability
' dF dF dF dF
L p ( x2 x1 ) xF 2 GM L
x1 A x2 A1 G G1 W1 B F p
dA
W
xF
L1 L
B1
dF
Chapter three: Initial stability
§3-5 The effect of weight movement on stability
M R GZ GM sin
Where GZ is the restoring arm, GM is the initial stability height。
+ MR
M
w
When the heeling angle is small,
sinф ≈ ф, therefore, the above formula can be written as:
Chapter three: initial stability
§3-2 Metacenter
水线面WL
W
o
y1
o
y1/2
W1
v 2 y2 o
y1
y2
L1
v1
dx
L
L
在等体积倾斜的情况下,出水楔形的体积和入水楔形的 体积必然相等,由此可得:
L/2 1 1 2 2 y dx y L / 2 2 1 L / 2 2 2 dx L/2
A1
p
L1
L
k
pl tg k / GM
船舶试验的原理
pl ZG ( Z B BM ) tg
Chapter Three: Initial stability
船舶稳性ppt课件
21
第三章 船舶稳性
G1G2 py
tg G1G2 GM0
tg py
(m)
GM0
22
第三章 船舶稳性
2.船内重物垂移 将引起船舶重心的垂向改变,从而导致初稳性高度的变化。 公式推导:平行力移动原理 注意:只改变重心高度(稳性)
不改变浮态(倾斜度)
GM P Z (m)
23
第三章 船舶稳性
2)随遇平衡 船舶倾斜后在重力W和浮力Δ的仍然作用在同一垂线上而不产生力矩,
因而船舶不能恢复到初始平衡位置,称该种船舶平衡状态为随遇平衡状态。
8
第三章 船舶稳性
3)不稳定平衡 船舶倾斜后在重力W和浮力Δ的作用下产生一倾覆力矩,在此力矩作用
下船舶将继续倾斜,称该种船舶初始平衡状态为不稳定平衡状态。
9
37
第三章 船舶稳性
2.载荷增减调整GM 船舶配载时、装载后或航行中在某些情况下可利用载荷增减方法调整稳
性。 载荷增减调整GM包括未满载时加压载水、吃水较大或满载时排压载水、
加装货物及抛货,一般此种调整方法属于少量载荷增减。
38
第三章 船舶稳性
四、保证船舶适度稳性的措施 归纳起来主要有以下若干项: 1.了解船舶状况及航线情况; 2.合理配载; 3.合理调整船舶稳性; 4.货物紧密堆垛,防止大风浪航行中位移; 5.合理平舱; 6.尽量减少自由液面影响; 7.消除船舶初始横倾;
2
MT
G Bo
K
L
3
第三章 船舶稳性
MT
F
B1
4
5
第三章 船舶稳性
M
Mh
MR
θ
L1
W
L
W
GZ
W1
第三章 船舶稳性
G1G2 py
tg G1G2 GM0
tg py
(m)
GM0
22
第三章 船舶稳性
2.船内重物垂移 将引起船舶重心的垂向改变,从而导致初稳性高度的变化。 公式推导:平行力移动原理 注意:只改变重心高度(稳性)
不改变浮态(倾斜度)
GM P Z (m)
23
第三章 船舶稳性
2)随遇平衡 船舶倾斜后在重力W和浮力Δ的仍然作用在同一垂线上而不产生力矩,
因而船舶不能恢复到初始平衡位置,称该种船舶平衡状态为随遇平衡状态。
8
第三章 船舶稳性
3)不稳定平衡 船舶倾斜后在重力W和浮力Δ的作用下产生一倾覆力矩,在此力矩作用
下船舶将继续倾斜,称该种船舶初始平衡状态为不稳定平衡状态。
9
37
第三章 船舶稳性
2.载荷增减调整GM 船舶配载时、装载后或航行中在某些情况下可利用载荷增减方法调整稳
性。 载荷增减调整GM包括未满载时加压载水、吃水较大或满载时排压载水、
加装货物及抛货,一般此种调整方法属于少量载荷增减。
38
第三章 船舶稳性
四、保证船舶适度稳性的措施 归纳起来主要有以下若干项: 1.了解船舶状况及航线情况; 2.合理配载; 3.合理调整船舶稳性; 4.货物紧密堆垛,防止大风浪航行中位移; 5.合理平舱; 6.尽量减少自由液面影响; 7.消除船舶初始横倾;
2
MT
G Bo
K
L
3
第三章 船舶稳性
MT
F
B1
4
5
第三章 船舶稳性
M
Mh
MR
θ
L1
W
L
W
GZ
W1
货运03 船舶稳性

7.2m
求近似货堆高 计算各货重心高: 平行中体: 0.5Hc 首尾:0.54~0.58Hc
KG的计算
(2)舱容曲线查取法 纵:货堆表面距基线高 下横:舱容 上横:容积中心距基线高 应用: 根据货堆表面高度求货物所占舱容和货物 重心距基线高;
舱容曲线
10 1 2 3 4 容积中心距基线高(m) 5 6
fi
9.81
ΣMfi——各舱自由液面修正力矩代数(KN.m)
§9-4 船舶大倾角稳性
2)重心高度修正法(通过对初稳性进行修正) 将自由液面对初稳性高度的修正值看作船舶重心升高
δGMf =-δKG= –(KG-KGo) KG=KGo+δGMf GZ=KN – KGsinθ =KN –(KGo+δGMf)· sinθ
4.减小自由液面影响的措施
1)减小液舱柜宽度 矩形液舱宽b, 分为n个等分 则: ixn=ix/n2
b
结构措施 (a)未隔舱
(b) 分隔为两个相等液舱
分隔为两个相等液舱后,自由液面效应将会减少至原来数 值之四分之一。
(c) 分隔为三个相等液舱
分隔为两个相等液舱后,自由液面效应将会减少至原来数 值之九分之一。因此,当自由液面效应产生时可以下式说 明: 其中n为所隔相等液舱数量。若当分隔为四个相等液舱时, 所减少的自由液面效应为十六分之一。
三、静稳性曲线
1.静稳性曲线绘制: ①计算KG和Δ ②据Δ在稳性横交曲线上查取各θ(10°~80°)下 KN值。 ③计算各θ的sin值 ④计算KH=KGsinθ ⑤计算GZ(lR)=KN-KH或 ⑥计算MR=9.81ΔGZ ⑦标连各点
复原力臂和复原力矩数值计算表
θ KN sinθ KH GZ MR MR (m) (m) t· m kN· m ° (m) 0 0 0 0 0 0 0 10 1.6 0.17 1.40 0.20 3707 36365 20 3.25 0.34 2.76 0.49 9143 89697 30 4.62 0.5 4.03 0.59 10916 107087 40 5.78 0.64 5.19 0.59 11009 108002 50 6.5 0.77 6.18 0.32 5971 58577 60 7.09 0.87 6.99 0.10 1866 18305 70 7.45 0.94 7.58 -0.13 -2426 -23797
求近似货堆高 计算各货重心高: 平行中体: 0.5Hc 首尾:0.54~0.58Hc
KG的计算
(2)舱容曲线查取法 纵:货堆表面距基线高 下横:舱容 上横:容积中心距基线高 应用: 根据货堆表面高度求货物所占舱容和货物 重心距基线高;
舱容曲线
10 1 2 3 4 容积中心距基线高(m) 5 6
fi
9.81
ΣMfi——各舱自由液面修正力矩代数(KN.m)
§9-4 船舶大倾角稳性
2)重心高度修正法(通过对初稳性进行修正) 将自由液面对初稳性高度的修正值看作船舶重心升高
δGMf =-δKG= –(KG-KGo) KG=KGo+δGMf GZ=KN – KGsinθ =KN –(KGo+δGMf)· sinθ
4.减小自由液面影响的措施
1)减小液舱柜宽度 矩形液舱宽b, 分为n个等分 则: ixn=ix/n2
b
结构措施 (a)未隔舱
(b) 分隔为两个相等液舱
分隔为两个相等液舱后,自由液面效应将会减少至原来数 值之四分之一。
(c) 分隔为三个相等液舱
分隔为两个相等液舱后,自由液面效应将会减少至原来数 值之九分之一。因此,当自由液面效应产生时可以下式说 明: 其中n为所隔相等液舱数量。若当分隔为四个相等液舱时, 所减少的自由液面效应为十六分之一。
三、静稳性曲线
1.静稳性曲线绘制: ①计算KG和Δ ②据Δ在稳性横交曲线上查取各θ(10°~80°)下 KN值。 ③计算各θ的sin值 ④计算KH=KGsinθ ⑤计算GZ(lR)=KN-KH或 ⑥计算MR=9.81ΔGZ ⑦标连各点
复原力臂和复原力矩数值计算表
θ KN sinθ KH GZ MR MR (m) (m) t· m kN· m ° (m) 0 0 0 0 0 0 0 10 1.6 0.17 1.40 0.20 3707 36365 20 3.25 0.34 2.76 0.49 9143 89697 30 4.62 0.5 4.03 0.59 10916 107087 40 5.78 0.64 5.19 0.59 11009 108002 50 6.5 0.77 6.18 0.32 5971 58577 60 7.09 0.87 6.99 0.10 1866 18305 70 7.45 0.94 7.58 -0.13 -2426 -23797
第九章船舶稳性
–对于水线面为矩形的船,Ix=LB3/12≈0·083 3LB3;
–对于水线面为菱形的船,Ix=LB3/48≈0·020 8LB3;
–对于一般船体,其水线面介于矩形和菱形之间,故Ix也介于
相应两者之间,其统计数值为Ix≈(0 .045一0.065)LB3。
2020/5/31
10
横稳心距基线高度Zm(或KM)
KM=KB+BM
或 Zm=Zb十r 由 船于 舶Z装b载和吃r均水与d
有 与d关有,关故,Z船m亦舶
静水力曲线图、
静水力参数表或
载重表中均给出
了船舶不同吃水
时 图Z表m。值曲线或
2020/5/31
11
四、初稳性高度的求取
设未考虑自由液面影响的船舶在装载后初稳性高度 可由下式求取
– GM=KM一KG
装载排水量△查取。表9-2为某船ix表。 2)公式计算法
– 具有折点且液面对称的液舱(柜),该类液舱(柜) 的ix可按下式求算 等腰梯形 :ix=L (b1+b2) (b12+b22) / 48 矩形:ix=L b3 / 12 ;等腰 三角形: ix=L b3 / 48
– 具有折点而液面不对称的液舱(柜)
ቤተ መጻሕፍቲ ባይዱ
MS=△·GZ 式中:MS—静稳性力矩(9.81 kN·m); △—排水量(t);
GZ—静稳性力臂(Statical stability lever) (m),是船舶重心G至倾斜后浮力作用线
的垂直距离,一般简称做稳性力臂或复原
力臂。 2020/5/31
4
–1、稳定平衡 ,G点在M点之下,GM>0 , 船具有稳性
2020/5/31
18
3)油水重量及其重心高度的确定
船舶初稳性ppt课件
横稳性和纵稳性 船舶在任何方向的倾斜,可分成如下两种基本浮态:
– 船舶的横向倾斜,即向左舷或右舷一侧的倾斜(简称横 倾); – 纵向的倾斜,即向船首或船尾的倾斜(简称纵倾)。 – 倾斜力矩的作用平面平行于中横剖面时称为横倾力矩, 它使船舶产生横倾。 – 倾斜力矩的作用平面平行于中纵剖面时称为纵倾力矩, 它使船舶产生纵倾。 – 船舶在横向和纵向抵抗倾斜的能力,分别称为横稳性和 纵稳性。
第2节 浮心的移动、稳心和稳心半径
稳性的主要问题:
– 复原力矩的计算
» 新的浮心位置的计算和确定,是求出复原力矩的 关键。
在讨论稳性问题时:
1. 首先确定倾斜水线的位置 2. 求出浮心位置和浮力作用线的位置 3. 分析复原力矩的大小及方向
一、等体积倾斜水线
如图示,设船舶平浮时的水线 为WL,在外力作用下横倾一小 角度Φ后的水线为W1L1.由于船 仅受倾斜力矩的作用,排水体 积保持不变,故倾斜水线W1L1 应是等体积倾斜水线。 为了确定W1L1的位置,对入水 楔形LOL1和出水楔形WOW1分 别进行分析。
– 先分别讨论重量在垂向、横向及纵向的移动情况; – 然后再研究重量在任意方向的移动情况。
一、重量的垂向移动
将船上某一重量为p的货物自 A点(垂向坐标z1)沿垂直方向 移至A1点(垂向坐标z2),移动 的距离为(z2-z1) 。 船的重心,由原来的G点垂向 移动至G1点,根据重心移动 原理可得
第三章 船舶稳性
稳性的主要内容
稳性的基本概念 基本的初稳性计算 货物移动和装卸对浮性及稳性的影响 其他影响
节次安排
1. 2. 3. 4. 5. 6. 7. 8. 9. 10.
海上货物运输课件——保证船舶具有适度的稳性

其中Mf.s——单个液舱的自 由液面倾侧力矩
(9.81KN.m) ρ——液体密度
(g/cm3) ix——液体表面对其本身中 心轴的面积惯性距
(m4)
七、自由液面对船舶初稳性的影响
2、自由液面惯性矩的计算
(1)等腰梯形(b12
b22 )
(m4 )
(2)等腰三角形液舱
ix
l b3 48
(m4 )
(3)矩形液舱 3、横向分舱可减少ix
l b3 ix 12
(m4 )
沿横向将液舱n等分,自由液面惯性矩可减少到原来的
1/n2
七、自由液面对船舶初稳性的影响
3、自由液面对船舶初稳性高度的修正
M R1 M R M f .s GM Sin i ix Sin (GM i ix ) Sin (m)
(1)估算法
四、货物合重心高度Z的确定方法
1、杂货船货舱内货物合重心高度的Z确 定
(2)取舱容中心作为舱内货物的合重心。
问题:有无误差?为什么允许该误差
四、货物合重心高度Z的确定方法
2、对于集装箱船,取集装箱高度的0.5(我国) 或0.45(IMO)作为单个集装箱的重心高度。 求取某一行位集装箱的合重心高度。以行位为 集装箱的基本计算单位求取集装箱的合重心高 度。
第二节 初稳性
三、初稳性的计算
1、初稳性高度(Initical stability hight)GM0
M R GZ GM Sin (9.81kN.m)
第二节 初稳性
三、初稳性的计算
GM 0 KM KG0 (KB BM ) KG0 (m)
三、初稳性的计算
GM 0 KM KG0 (KB BM ) KG0 (m)
KG1——加载前船舶
(9.81KN.m) ρ——液体密度
(g/cm3) ix——液体表面对其本身中 心轴的面积惯性距
(m4)
七、自由液面对船舶初稳性的影响
2、自由液面惯性矩的计算
(1)等腰梯形(b12
b22 )
(m4 )
(2)等腰三角形液舱
ix
l b3 48
(m4 )
(3)矩形液舱 3、横向分舱可减少ix
l b3 ix 12
(m4 )
沿横向将液舱n等分,自由液面惯性矩可减少到原来的
1/n2
七、自由液面对船舶初稳性的影响
3、自由液面对船舶初稳性高度的修正
M R1 M R M f .s GM Sin i ix Sin (GM i ix ) Sin (m)
(1)估算法
四、货物合重心高度Z的确定方法
1、杂货船货舱内货物合重心高度的Z确 定
(2)取舱容中心作为舱内货物的合重心。
问题:有无误差?为什么允许该误差
四、货物合重心高度Z的确定方法
2、对于集装箱船,取集装箱高度的0.5(我国) 或0.45(IMO)作为单个集装箱的重心高度。 求取某一行位集装箱的合重心高度。以行位为 集装箱的基本计算单位求取集装箱的合重心高 度。
第二节 初稳性
三、初稳性的计算
1、初稳性高度(Initical stability hight)GM0
M R GZ GM Sin (9.81kN.m)
第二节 初稳性
三、初稳性的计算
GM 0 KM KG0 (KB BM ) KG0 (m)
三、初稳性的计算
GM 0 KM KG0 (KB BM ) KG0 (m)
KG1——加载前船舶
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.按作用力矩的性质分类
静稳性:指船舶在倾斜过程中,不计及角加速和惯性矩时的稳性。它是研究 倾斜力矩和稳性力矩之间的静平衡问题。 动稳性:指船舶在动力作用下倾斜时,及计角加速或角速度的倾斜称为动力 倾斜。船舶在动力倾斜时的稳性称为动稳性。它是研究倾斜力矩所作功和稳 性力矩所作功之间的动平衡问题。
第三章
第三章
船舶稳性
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性 力矩或复原力矩的大小。
MS = 9.81Δ•GZ=9.81Δ•GMsinθ
二、船舶稳性的分类 1.按倾斜方向分类
横稳性:系指船舶在横倾力矩的作用下,饶纵向X轴的横向倾斜称为横倾, 船舶在横倾时的稳性称为横稳性。
纵稳性:指船舶在纵倾力作用下,绕横向Y轴的纵向倾斜称为纵倾,船舶在 纵倾时的稳性称为纵稳性。
第三章
船舶稳性
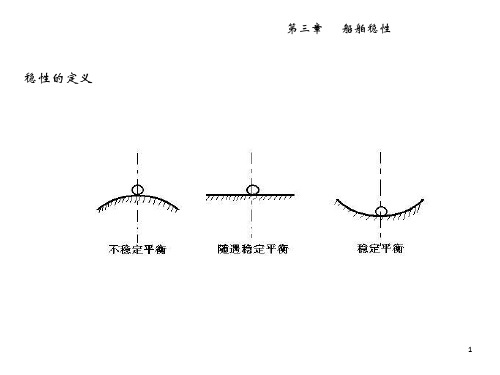
稳性的定义
第三章
船舶稳性
船舶稳性是指船舶在外力矩作用下偏离其初始平衡位置而倾斜,船舶 具有抵抗外力并当外力矩消除后船舶还具有恢复原来平衡状态的能力。
第一节 船舶稳性基本概念
一、船舶平衡的3种状态 船舶漂浮于水面上,其重力为W,浮力为Δ,G为船舶重心,B为船舶初 始位置的浮心。在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水 线下排水体积的几何形状改变,浮心B移至B1点,当外力矩消失后船舶能否 恢复到初始平衡位置,取决于它处在何种平衡状态。
船舶稳性
稳性不足的后果
第三章
船舶稳性
第三章
船舶稳性
第三章
船舶稳性
2.船舶平衡状态的判别 定义:船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以 字母M表示。 与稳心位置有关的因素:船舶吃水(或排水量)、船舶倾角不同。 原因:船舶倾斜后的吃水状态发生变化。 船舶的平衡状态分类: 稳定平衡: 重心G在稳心M之下,GM>0,MR>0 随遇平衡 :重心G与稳心M重合,GM=0,MR=0 不稳定平衡:重心G在稳心M之上,GM<0,MR<0
第三章
船舶稳性
G1G2 py
GM 0 ( m)
G G 1 2 tg
py tg GM 0
第三章
船舶稳性
2.船内重物垂移 将引起船舶重心的垂向改变,从而导致初稳性高度的变化。 公式推导:平行力移动原理 注意:只改变重心高度(稳性) 不改变浮态(倾斜度)
PZ GM
第三章
船舶稳性
第三节 载荷变动对稳性的影响及计算 船上载荷变动包括载荷移动、重量增减和货物悬挂,它们对船舶稳性 的影响是不同的。 一、载荷移动 移动原因ቤተ መጻሕፍቲ ባይዱ航行中的摇晃、配载时的调整船舶稳性等。
1.船内重物水平移动
平衡了移动原理:移动力则需附加力偶,且力偶大小=力*移动距离 注意:只改变浮态(倾角),不改变初稳性高度 由于浮力和重力不再作用于同一垂线上而形成力偶,该力偶矩将迫使船 舶向重物移动方向的一侧横倾。
GM可以作为衡量船舶初稳性大小的基本标志。欲使船舶具有稳性,必须 式GM>0。
第三章
船舶稳性
由公式可知,静稳性力矩MS与排水量成正比。在排水量较小的状态下, 欲保持一定的静稳性力矩,则必须增大船舶的初稳性高度。 ①初稳性方程: MS = 9.81Δ•GZ=9.81Δ•GMsinθ ②衡量标志:GM ③影响初稳性因素: Δ ↗、 GM↗ → MS↗ 规定:与外力矩Mh反向时,MS>0 与外力矩Mh同向时,MS<0
2)随遇平衡 船舶倾斜后在重力W和浮力Δ的仍然作用在同一垂线上而不产生力矩, 因而船舶不能恢复到初始平衡位置,称该种船舶平衡状态为随遇平衡状态。
第三章
船舶稳性
3)不稳定平衡 船舶倾斜后在重力W和浮力Δ的作用下产生一倾覆力矩,在此力矩作用 下船舶将继续倾斜,称该种船舶初始平衡状态为不稳定平衡状态。
第三章
第三章
船舶稳性
一、船舶初稳性的基本标志 船舶在小倾角条件下,静稳性力矩MS可表示为
MS GZ GM Sin
(9.81kN.m)
第三章
船舶稳性
式中: GM表示船舶重心G 与稳心M间的垂直距离,称为初稳性高度(Initial stability hight)GM 。 θ船舶倾角 结论:在排水量及倾角一定的情况,静稳性力矩的大小取决于重心和稳心 的相对位置,即取决于GM的大小。当M点在G点之上,GM为正值,此时船 舶具有稳性力矩并与GM值成正比;当当M点在G点之下,GM为负值,此时 船舶具有倾覆力矩并与GM值成正比;当M点和G点重合,GM为零,此时稳 性力矩为零。
船舶稳性
4.按船舱是否进水分类 船体在完整状态的稳性称为完整稳性;船体破损进水后的稳性称为破损 稳性,研究破损稳性对海难应急意义重大。
第三章
船舶稳性
第二节 三个假设前提:
船舶初稳性
1.船舶在微倾条件下,倾斜轴过初始水线面的面积中心即初始漂心F; 2.过初始漂心F微倾后船舶排水体积不变; 3.当排水量一定时,船舶的稳心M点为一定点。
第三章
船舶稳性
2.按倾角大小分类 (1)初稳性(Initial stability)——船舶微倾时所具有的稳性(小倾角稳性), 微倾在实际营运中将倾角扩大至10 ~ 15 。 (2)大倾角稳性(Stability at large angle of inclination)——倾角大于 10 ~ 15时的稳性。
MT
G
Bo
K
L
第三章
船舶稳性
MT
F
B1
第三章
船舶稳性
Mh
W
M θ
MR L1 Z B1 L W L
G
W1 B
Z B1
K
第三章
船舶稳性
1)稳定平衡 船舶倾斜后在重力W和浮力Δ的作用下产生一稳性力矩,在此力矩作用 下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡 状态。
第三章
船舶稳性
(t )
KG1
KG Pi Z i 1 Pi
( m)
(4)计算载荷变动后的初稳性高度
( m)
第三章
船舶稳性
二、重量增减
1、重量大量增减 (P>10%Δ)
(1)求载荷变动后的排水量
设船舶原排水量为Δ,原重心距基线高度为KG,则载荷变动后的排水 为
(2)根据载荷变动后的排水量Δ1查表确定新的横稳心距基线高度KM1 (3)计算确定载荷变动后的船舶重心高度KG1。
1 P i