机器人控制理论和技术专题培训课件
合集下载
《机器人控制》PPT课件
同样可得活塞位移X与配油器输入信号(位移误 差信号)U间的关系为:
编辑ppt
29
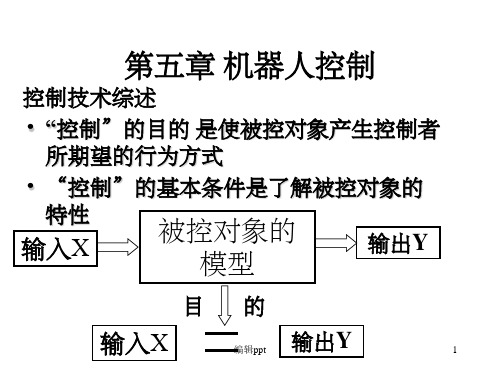
5.l机器人的基本控制原则
5.1.2伺服控制系统举例 2.电一液压伺服控制系统
据式(5.5)、(5.6)和图5.4可得系统的传递 函数:
编辑ppt
30
5.l机器人的基本控制原则
5.1.2伺服控制系统举例 2.电一液压伺服控制系统 当采用力矩电动机作为位移给定元件时
编辑ppt
43
5.2 机器人的位置控制
机器人为连杆式机械手,其动态特性具有高度的非线性。 要控制这种由马达驱动的操作机器人,用适当的数学方 程式来表示其运动是十分重要的。这种数学表达式就是 数学模型,或简称模型。控制机器人运动的计算机,运 用这种数学模型来预测和控制将要进行的运动过程。
式中,1很小而又可以忽略时
编辑ppt
31
5.l机器人的基本控制原则
5.1.2伺服控制系统举例
3.滑阀控制液压传动系统 图5.5表示出一个简单的滑阀控制液压传动系统 的结构框图。其中所用的控制阀为四通滑阀。
编辑ppt
32
5.l机器人的基本控制原则
5.1.2伺服控制系统举例 3.滑阀控制液压传动系统
5.1.2伺服控制系统举例
3.滑阀控制液压传动系统
式中,c=k1n为闭环系统的自然角振荡频率;
c k1 为闭环系统的阻尼系数:2 1 为k1闭环系统
的第二时间常数;另一时间常数为1。
式(5.25)即为所求闭环系统的传递函数。从此式 可见,此闭环系统为一等价三阶系统。我们往往把 它简化为一个一阶环节与一个二阶环节串联的系统。 这样,便于对系统进行分析与研究。
13
PID控制器参数整定的一般规律
第1章 机器人控制技术绪论 机器人原理及控制技术 教学课件
1949-1953 美国麻省理工学院开始研制数控铣床
随 着 先 进 飞 机 制 造 的 需 要 , 美 国 麻 省 理 工 学 院 辐 射 实 验 室 ( MIT Radiation Laboratory)开始研制数控铣床。
1953年研制成功能按照模型轨迹做切削动作的多轴数控铣床。
1954年 “可编程”“示教再现”机器人
美国国家标准局(NBS)的定义:机器人是一种能够进行编程并在自动 控制下执行某些操作和移动作业任务的机械装置。
美国机器人协会(RIA)的定义:机器人是一种用于移动各种材料、零 件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有 编程能力的多功能机械手。
日本工业机器人协会(JIRA)的定义:工业机器人是一种装备有记忆装 置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动 的通用机器。
日本早稻田大学加藤一朗(日本机器人之父) 教授认为:机器人是由能 工作的手,能行动的脚和有意识的头脑组成的个体,同时具有非接触传 感器(相当于耳、目)、接触传感器(相当于皮肤)、固有感及平衡感 等感觉器官的能力。
2020/10/3
智能与控制工程研究所
12
也有一些组织和学者针对不同形式的机器人分别给出具体的解释 和定义,而机器人则只作为一种总称。例如,日本工业机器人协 会(JIRA)列举了6种型式的机器人:
2020/10/3
智能与控制工程研究所
8
80年代 开始进入智能机器人研究阶段
80年代,不同结构、不同控制方法和不同用途的工业机器人在工业发达国 家真正进入了实用化的普及阶段。
随着传感技术和智能技术的发展,开始进入智能机器人研究阶段。
机器人视觉、触觉、力觉、接近觉等项研究和应用,大大提高了机器人的 适应能力,扩大了机器人的应用范围,促进了机器人的智能化进程。
随 着 先 进 飞 机 制 造 的 需 要 , 美 国 麻 省 理 工 学 院 辐 射 实 验 室 ( MIT Radiation Laboratory)开始研制数控铣床。
1953年研制成功能按照模型轨迹做切削动作的多轴数控铣床。
1954年 “可编程”“示教再现”机器人
美国国家标准局(NBS)的定义:机器人是一种能够进行编程并在自动 控制下执行某些操作和移动作业任务的机械装置。
美国机器人协会(RIA)的定义:机器人是一种用于移动各种材料、零 件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有 编程能力的多功能机械手。
日本工业机器人协会(JIRA)的定义:工业机器人是一种装备有记忆装 置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动 的通用机器。
日本早稻田大学加藤一朗(日本机器人之父) 教授认为:机器人是由能 工作的手,能行动的脚和有意识的头脑组成的个体,同时具有非接触传 感器(相当于耳、目)、接触传感器(相当于皮肤)、固有感及平衡感 等感觉器官的能力。
2020/10/3
智能与控制工程研究所
12
也有一些组织和学者针对不同形式的机器人分别给出具体的解释 和定义,而机器人则只作为一种总称。例如,日本工业机器人协 会(JIRA)列举了6种型式的机器人:
2020/10/3
智能与控制工程研究所
8
80年代 开始进入智能机器人研究阶段
80年代,不同结构、不同控制方法和不同用途的工业机器人在工业发达国 家真正进入了实用化的普及阶段。
随着传感技术和智能技术的发展,开始进入智能机器人研究阶段。
机器人视觉、触觉、力觉、接近觉等项研究和应用,大大提高了机器人的 适应能力,扩大了机器人的应用范围,促进了机器人的智能化进程。
机器人原理及控制技术教学课件

理,并了解如何在机器人控制中应
用这些技术。
3
自适应控制与优化
了解自适应控制和优化算法,在机 器人控制中提高性能和适应不确定 性。
教学课件PPT的内容
1 清晰明了的结构
通过逻辑性强、层次分明的课件结构,帮助学生理解和记忆复杂的机器人原理和控制技 术。
2 生动的示例和动画
运用生动的示例和精美的动画,激发学生的兴趣,帮助他们更好地理解和体验机器人的 世界。
机器人原理及控制技术教 学课件PPT
欢迎来到机器人原理及控制技术教学课件PPT!在这个课程中,我们将深入探 讨机器人的原理以及控制技术。通过丰富的内容、清晰的架构和实践案例, 我们将帮助您深入理解这个令人着迷的领域。
机器人原理
机器人系统结构
从传感器、控制器到执行器,探索机器人的基本构成和各个组件之间的关系。
2
小组讨论
组织学生进行小组讨论,促使他们相互学习和交流,拓宽视野和思维方式。
3
师生互动
鼓励学生提问和参与课堂,与教师进行互动,促进深入思考和理解。
3 实践操控机器人
通过实践操控真实的机器人,让学生亲身体验机器人的控制和应用,提升他们的技能和 创新思维。
课件的架和布局
核心概念
在课件的开头明确介绍机 器人原理和控制技术的核 心概念和基本原理。
详细案例
通过详细的案例分析,深 入剖析机器人的应用和实 际问题的解决方法。
练习与作业
在适当的位置设置练习和 作业,帮助学生巩固所学 知识,并提供反馈和指导。
运动学与动力学
了解机器人的运动学和动力学原理,以及在不同应用中的运动规划和控制策略。
人工智能与机器学习
探索如何将人工智能和机器学习应用于机器人,以实现自主决策和学习能力。
机器人控制理论与技术8PPT课件
Source:
12
13
14
15
自由度 Degrees of Freedom
位姿自由度:系统在空间中的位姿描述所 需变量的个数。
16
可控自由度
可控自由度vs不可控自由度
17
根据自由度系统的分类
TDOF = CDOF Holonomic(完整)
比如直升机
TDOF > CDOF Nonholonomic(非完整)
执执执执 Effector
环环 Environment
4
运动装置的作用
机器人本体运动 locomotion 移动环境物体 manipulation
5
直流电机
优点:
简单、价廉、性能可靠、易 于使用、易于购买
输入:
电流或者电压
速度:
3k~9krpm(50~150rps)
问题:
速度较高/力矩较小
9
电机伺服
目的:以转动到给定位置 代替电机的连续运转
组成结构
电机本体 减速箱 位置或速度传感器 控制器或驱动器
输入信号:
经过脉冲调制的电压信号
10
NXT Motor(LEGO)
齿轮编码器 电机
齿轮组
主传动轴
11
NXT Motor转速vs功率曲线
No load, no servo, 9V No load, no servo, 7.2V 11.5 Ncm load, no servo, 9V NXT 11.5 Ncm load, servo, 9V 11.5 Ncm, load, servo, 7.2V
x v cos
y
v sin
v
r r
2
l l
《机器人的控制系统》课件

应用领域
了解机器人控制系统在工业自动化、医疗护理、农业与食品加工等领域的广泛应用。
机器人的控制系统技术
传感器技术
探索机器人控制系统中的传感器 技术,如摄像头、激光雷达和力 觉传感器。
数据处理与算法
研究机器人控制系统中的数据处 理和算法,以实现高效、准确的 决策与规划。
控制器设计与实现
了解机器人控制系统中的控制器 设计和实现原理,包括硬件架构 和软件编程。
探讨人机协作和智能感知在机器人控制系统中的发展和应用前景。
2 自主决策与深度学习
研究自主决策和深度学习技术对机器人控制系统的影响和潜在机会。
3 安全性与可靠性
考虑机器人控制系统的安全性和可靠性问题,以建立安全且可信赖的机器人系统。
机器人的控制系统发展
感谢大家参与本《机器人的控制系统》PPT课件。希望通过本课程的学习,您 能够深入了解机器人控制系统的技术和应用,为未来的机器人发展做出贡献。
《机器人的控制系统》 PPT课件
欢迎大家来到《机器人的控制系统》PPT课件。在本课程中,我们将深入研究 机器人控制系统的关键概念、技术和应用领域,并探讨未来的挑战和趋势。
机器人的控制系统概述
系统组成
了解机器人控制系统的基本组成,包括感知与数据采集、决策与规划、执行与控制。
技术要点
掌握机器人控制系统的关键技术,如传感器技术、数据处理与算法、控制器设计与实现。
机器人控制系统的应用领域
Байду номын сангаас
1
工业自动化
探索机器人控制系统在自动化生产线上的应用,提高生产效率和产品质量。
2
医疗护理
了解机器人控制系统在医疗领域的应用,如手术机器人和辅助护理机器人。
了解机器人控制系统在工业自动化、医疗护理、农业与食品加工等领域的广泛应用。
机器人的控制系统技术
传感器技术
探索机器人控制系统中的传感器 技术,如摄像头、激光雷达和力 觉传感器。
数据处理与算法
研究机器人控制系统中的数据处 理和算法,以实现高效、准确的 决策与规划。
控制器设计与实现
了解机器人控制系统中的控制器 设计和实现原理,包括硬件架构 和软件编程。
探讨人机协作和智能感知在机器人控制系统中的发展和应用前景。
2 自主决策与深度学习
研究自主决策和深度学习技术对机器人控制系统的影响和潜在机会。
3 安全性与可靠性
考虑机器人控制系统的安全性和可靠性问题,以建立安全且可信赖的机器人系统。
机器人的控制系统发展
感谢大家参与本《机器人的控制系统》PPT课件。希望通过本课程的学习,您 能够深入了解机器人控制系统的技术和应用,为未来的机器人发展做出贡献。
《机器人的控制系统》 PPT课件
欢迎大家来到《机器人的控制系统》PPT课件。在本课程中,我们将深入研究 机器人控制系统的关键概念、技术和应用领域,并探讨未来的挑战和趋势。
机器人的控制系统概述
系统组成
了解机器人控制系统的基本组成,包括感知与数据采集、决策与规划、执行与控制。
技术要点
掌握机器人控制系统的关键技术,如传感器技术、数据处理与算法、控制器设计与实现。
机器人控制系统的应用领域
Байду номын сангаас
1
工业自动化
探索机器人控制系统在自动化生产线上的应用,提高生产效率和产品质量。
2
医疗护理
了解机器人控制系统在医疗领域的应用,如手术机器人和辅助护理机器人。
《机器人控制技术》课件

运动学与动力学在机器人控制中的应用
通过运动学和动力学模型,可以实现对机器人的精确控制,提高机器人的运动性能和稳定性。
机器人运动学的定义
机器人运动学是研究机器人在空间中的位置和姿态如何随时间变化的科学,主要关注速度和加速度等运动参数。
机器人自主控制技术
CATALOGUE
05
环境感知
机器人通过传感器获取周围环境的信息,包括障碍物、地形、光照等,并进行识别、分类和跟踪。
模块化
工业自动化
机器人控制技术在工业自动化领域有着广泛的应用前景,能够提高生产效率和降低成本。
家庭服务
随着人口老龄化的加剧,家庭服务机器人需求越来越大,机器人控制技术在家庭服务领域有着广阔的应用前景。
医疗护理
机器人控制技术在医疗护理领域的应用也越来越广泛,如康复机器人、护理机器人等。
农业
在农业领域,机器人控制技术可以用于自动化种植、施肥、采摘等方面,提高农业生产效率和质量。
执行器
机器人的末端执行器,负责与环境进行交互。
开环控制系统和闭环控制系统。
根据控制方式
根据任务类型
根据系统结构
位置控制系统、速度控制系统和力控制系统。
集中式控制系统和分布式控制系统。
03
02
01
研究机器人末端执行器与关节之间的几何关系,以及如何通过关节角度计算出末端执行器的位置和姿态。
运动学
研究机器人运动过程中力与运动之间的关系,用于精确控制机器人的动态行为。
《机器人控制技术》ppt课件
目录
contents
机器人控制技术概述机器人控制系统机器人感知与感知技术机器人运动控制技术机器人自主控制技术机器人控制技术的前沿研究与展望
机器人控制技术概述
通过运动学和动力学模型,可以实现对机器人的精确控制,提高机器人的运动性能和稳定性。
机器人运动学的定义
机器人运动学是研究机器人在空间中的位置和姿态如何随时间变化的科学,主要关注速度和加速度等运动参数。
机器人自主控制技术
CATALOGUE
05
环境感知
机器人通过传感器获取周围环境的信息,包括障碍物、地形、光照等,并进行识别、分类和跟踪。
模块化
工业自动化
机器人控制技术在工业自动化领域有着广泛的应用前景,能够提高生产效率和降低成本。
家庭服务
随着人口老龄化的加剧,家庭服务机器人需求越来越大,机器人控制技术在家庭服务领域有着广阔的应用前景。
医疗护理
机器人控制技术在医疗护理领域的应用也越来越广泛,如康复机器人、护理机器人等。
农业
在农业领域,机器人控制技术可以用于自动化种植、施肥、采摘等方面,提高农业生产效率和质量。
执行器
机器人的末端执行器,负责与环境进行交互。
开环控制系统和闭环控制系统。
根据控制方式
根据任务类型
根据系统结构
位置控制系统、速度控制系统和力控制系统。
集中式控制系统和分布式控制系统。
03
02
01
研究机器人末端执行器与关节之间的几何关系,以及如何通过关节角度计算出末端执行器的位置和姿态。
运动学
研究机器人运动过程中力与运动之间的关系,用于精确控制机器人的动态行为。
《机器人控制技术》ppt课件
目录
contents
机器人控制技术概述机器人控制系统机器人感知与感知技术机器人运动控制技术机器人自主控制技术机器人控制技术的前沿研究与展望
机器人控制技术概述
《机器人控制》课件
总结词
描述机器人轨迹规划的方法和步骤。
详细描述
介绍机器人轨迹规划的定义、目的和意义,以及基于时间、基于距离、基于加速 度等轨迹规划方法,并给出相应的规划步骤和实例。
04
机器人控制算法
基于规则的控制算法
基础且常用
基于规则的控制算法是机器人控制中最为基础和常用的算法之一。它根据预先设 定的规则或逻辑,对机器人的运动进行控制。这种算法通常比较简单,易于实现 ,适合于一些简单的、确定性强的任务。
详细描述
介绍机器人运动学的定义、研究内容 、坐标系建立、运动学方程的建立等 基本概念,以及正运动学和逆运动学 的求解方法。
机器人动力学基础
总结词
描述机器人动力学的基础概念和原理。
详细描述
介绍机器人动力学的基本概念,如牛顿-欧拉方程、拉格朗日方程等,以及机器 人在各种运动状态下的动力学特性。
机器人轨迹规划
服务机器人应用实例
家庭服务
服务机器人进入家庭,提 供清洁、烹饪、照看老人 和儿童等服务,提高家庭 生活质量。
医疗护理
服务机器人在医疗护理领 域协助医生诊断、护理病 人,提高医疗服务水平。
旅游导览
服务机器人在旅游景区提 供导览服务,为游客提供 详细的信息和便利的导航 。
特种机器人应用实例
深海探测
特种机器人潜入深海进行资源勘探、海洋生物研 究等,拓展人类对海洋的认识。
《机器人控制》ppt课件
• 机器人控制概述 • 机器人感知与决策 • 机器人运动控制 • 机器人控制算法 • 机器人应用实例
01
机器人控制概述
机器人控制的基本概念
机器人控制
控制系统的目标
指通过预设的算法或指令,使机器人 按照要求完成一系列动作或任务的过 程杂、精确的 任务。
描述机器人轨迹规划的方法和步骤。
详细描述
介绍机器人轨迹规划的定义、目的和意义,以及基于时间、基于距离、基于加速 度等轨迹规划方法,并给出相应的规划步骤和实例。
04
机器人控制算法
基于规则的控制算法
基础且常用
基于规则的控制算法是机器人控制中最为基础和常用的算法之一。它根据预先设 定的规则或逻辑,对机器人的运动进行控制。这种算法通常比较简单,易于实现 ,适合于一些简单的、确定性强的任务。
详细描述
介绍机器人运动学的定义、研究内容 、坐标系建立、运动学方程的建立等 基本概念,以及正运动学和逆运动学 的求解方法。
机器人动力学基础
总结词
描述机器人动力学的基础概念和原理。
详细描述
介绍机器人动力学的基本概念,如牛顿-欧拉方程、拉格朗日方程等,以及机器 人在各种运动状态下的动力学特性。
机器人轨迹规划
服务机器人应用实例
家庭服务
服务机器人进入家庭,提 供清洁、烹饪、照看老人 和儿童等服务,提高家庭 生活质量。
医疗护理
服务机器人在医疗护理领 域协助医生诊断、护理病 人,提高医疗服务水平。
旅游导览
服务机器人在旅游景区提 供导览服务,为游客提供 详细的信息和便利的导航 。
特种机器人应用实例
深海探测
特种机器人潜入深海进行资源勘探、海洋生物研 究等,拓展人类对海洋的认识。
《机器人控制》ppt课件
• 机器人控制概述 • 机器人感知与决策 • 机器人运动控制 • 机器人控制算法 • 机器人应用实例
01
机器人控制概述
机器人控制的基本概念
机器人控制
控制系统的目标
指通过预设的算法或指令,使机器人 按照要求完成一系列动作或任务的过 程杂、精确的 任务。
《机器人控制技术》课件
《机器人控制技术》PPT
课件
欢迎来到《机器人控制技术》课程!本课程将介绍机器人控制技术的定义、
发展历史以及应用领域。
什么是机器人控制技术
定义
机器人控制技术指的是用来控制、指导和管理机器人的各种方法和技术。
发展历史⏳
机器人控制技术从20世纪开始逐渐发展,并在近几十年中取得了重大突破和进展。
应用领域
机器人控制技术广泛应用于制造业、医疗行业、农业、航空航天等多个领域。
机器人运动控制技术
1
运动分类♂️
机器人运动可以分为直线运动、旋转运
位置控制技术
2
动和复杂轨迹等多种分类。
3
运动控制方法⚙️
位置控制技术用于精确定位机器人在空
间中的位置和姿态。
机器人运动控制方法包括基于传感器的
反馈控制、路径规划和运动学控制等。
机器人传感器控制技术
传器、光学传感器、声音传感器和力传感器等多种类型。
传感器原理
传感器通过感知环境中的各种物理量,并将其转化为机器人能够理解的电信号。
传感器在机器人中的应用
传感器在机器人中扮演着重要角色,用于实时感知环境、避障和物体抓取等任务。
机器人视觉控制技术
机器人行为建模
机器人学习算法
机器人网络控制技术
研究机器人在不同场景中的行
开发机器人学习算法,使其能
为模式和规律,以实现自主决
够通过数据和经验提升自身的
研究机器人之间的通信和协作
策和行为规划。
能力,实现更高效的任务执
机制,实现多机器人系统的集
行。
成和统一控制。
总结
1
机器人控制技术的重
要性
2
机器人控制技术的发
课件
欢迎来到《机器人控制技术》课程!本课程将介绍机器人控制技术的定义、
发展历史以及应用领域。
什么是机器人控制技术
定义
机器人控制技术指的是用来控制、指导和管理机器人的各种方法和技术。
发展历史⏳
机器人控制技术从20世纪开始逐渐发展,并在近几十年中取得了重大突破和进展。
应用领域
机器人控制技术广泛应用于制造业、医疗行业、农业、航空航天等多个领域。
机器人运动控制技术
1
运动分类♂️
机器人运动可以分为直线运动、旋转运
位置控制技术
2
动和复杂轨迹等多种分类。
3
运动控制方法⚙️
位置控制技术用于精确定位机器人在空
间中的位置和姿态。
机器人运动控制方法包括基于传感器的
反馈控制、路径规划和运动学控制等。
机器人传感器控制技术
传器、光学传感器、声音传感器和力传感器等多种类型。
传感器原理
传感器通过感知环境中的各种物理量,并将其转化为机器人能够理解的电信号。
传感器在机器人中的应用
传感器在机器人中扮演着重要角色,用于实时感知环境、避障和物体抓取等任务。
机器人视觉控制技术
机器人行为建模
机器人学习算法
机器人网络控制技术
研究机器人在不同场景中的行
开发机器人学习算法,使其能
为模式和规律,以实现自主决
够通过数据和经验提升自身的
研究机器人之间的通信和协作
策和行为规划。
能力,实现更高效的任务执
机制,实现多机器人系统的集
行。
成和统一控制。
总结
1
机器人控制技术的重
要性
2
机器人控制技术的发
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二代机器人由于采用了传感器,已初步具有感 觉-反馈控制的能力,能进行识别、选取判断。使 机器人具有了初步的智能。因而传感器的采用与 否已成为衡量第二代机器人的重要特征。
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
HELPMATE
Helpmate具备多种传感器,可以利用天花板上的 路标做引导,实现避障等功能。
机器人的发展历史
第一代机器人是一种进行重复操作的机械、主要 是通常所说的机械手,它虽配有电子存储装置, 能记忆重复动作,然而因未采用外部传感器,所 以没有适应外界环境变化的能力。
第二代机器人由于采用了传感器,已初步具有感 觉-反馈控制的能力,能进行识别、选取判断。使 机器人具有了初步的智能。因而传感器的采用与 否已成为衡量第二代机器人的重要特征。
Karel Capek and his “Rossum's Universal Robots”
机器人的发展历史
第一代机器人是一种进行重复操作的机械,即通 常所说的机械手,它虽配有电子存储装置,能记 忆重复动作,然而因未采用外部传感器,所以没 有适应外界环境变化的能力。
第二代机器人由于采用了传感器,已初步具有感 觉-反馈控制的能力,能进行识别、选取判断。使 机器人具有了初步的智能。因而传感器的采用与 否已成为衡量第二代机器人的重要特征。
什么是Robot?
什么是Robot?
a machine that can do some tasks that a human can do and that works automatically or is controlled by a computer。
机器人的发展历史—《列子·汤问篇》
课程考核方法
本课程采用课程论文作为主要考核方式; 结合学生平时成绩和实验成绩;
平时成绩占20% 实验成绩占30% 课程论文成绩占50%
机器人技术作为20世纪人类最伟大的发明 之一,自上世纪四十、五十年代问世以来, 经历了60年的发展已经取得了长足的进步! 在人们的生产生活的很多领域发挥着越来越 重要的作用。
课程主要教学内容
理论教学(24学时)
移动机器人发展历程与体系结构(1学时) 移动机器人的感知技术(6学时) 移动机器人的定位技术(5学时) 移动机器人的路径规划(6学时) 移动机器人的运动控制技术(6学时)
实验教学(8学时)
机器人结构认识(1学时) 机器人传感器的使用(2学时) 机器人运动控制(3学时) 机器人避障实验(2学时)
数恶劣地形,如雪地、 山区、沙地等。
双足机器人—ASIMO
生产商:HONDA 自重:54Kg 身高:130cm 持重:
单手:0.3Kg 双手:1.0Kg
速度:
通常步行时0~2.7km/h 持重行走时1.6km/h 直线行走时6.0km/h 旋回行走时5.0km/h
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
自主移动机器人
Spirit & Opportunity
轮式移动机器人—Nomad
大小:2.4*2.4*2.4(m) 重量:725Kg 速度:0.5m/s GPS定位
履带式移动机器人—PackBot 510
机器人控制理论和技术1
课程简介
教学内容:机器人的基本结构组成、工作原理、控制及分 析方法。 教学目标:使学生通过本课程的学习,了解当前国内外机 器人控制的研究、应用状况以及发展趋势,初步具备机器 人控制系统的设计能力,提高学生分析问题和解决问题的 能力。 教材:《自主移动机器人导论》,Siegwart著,李人厚译, 西安交通大学出版社,2006年9月
时间:(约公元前1054年—公元前949年)西周 ቤተ መጻሕፍቲ ባይዱ人物:周穆王,偃师,伶人
“Robot”一词最早出现在哪位作者的著 作中?
Geoge Devol
Norbert Wiener
Isaac Asimov
Karel Capek
“Robot”一词最早出现在哪位作家的小说中? A. Norbert. Wiener B. Isaac Asimov C. Karel Capek D. Geoge Devol
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
第一代工业机器人的代表
1961年,通用汽车公司生产线 Unimate and Joseph Engelberger
机器人的发展历史
第一代机器人是一种进行重复操作的机械、主要 是通常所说的机械手,它虽配有电子存储装置, 能记忆重复动作,然而因未采用外部传感器,所 以没有适应外界环境变化的能力。
The word `robotic' also comes from science fiction - it first appeared in the short story `Runaround' (1942) by Isaac Asimov. This story was later included in Asimov's famous book `I, Robot.'
自重:19公斤 负重:20公斤 行进速度:2.5m/s 连续运行时间:10h 其它特性:防水
四腿机器人——BigDog
Boston Dynamics
Name:BigDog 自重:234lbs 负重:340lbs 速度:6.4km/h 爬坡角:35度 特点:可适应绝大多
“Robot”的来源
The word `Robot' comes from the 1920 play `R.U.R.' (Rossum's Universal Robots) by the Czech writer Karel Capek. `Robot' comes from the Czech word `robota', meaning `forced labor.'
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
HELPMATE
Helpmate具备多种传感器,可以利用天花板上的 路标做引导,实现避障等功能。
机器人的发展历史
第一代机器人是一种进行重复操作的机械、主要 是通常所说的机械手,它虽配有电子存储装置, 能记忆重复动作,然而因未采用外部传感器,所 以没有适应外界环境变化的能力。
第二代机器人由于采用了传感器,已初步具有感 觉-反馈控制的能力,能进行识别、选取判断。使 机器人具有了初步的智能。因而传感器的采用与 否已成为衡量第二代机器人的重要特征。
Karel Capek and his “Rossum's Universal Robots”
机器人的发展历史
第一代机器人是一种进行重复操作的机械,即通 常所说的机械手,它虽配有电子存储装置,能记 忆重复动作,然而因未采用外部传感器,所以没 有适应外界环境变化的能力。
第二代机器人由于采用了传感器,已初步具有感 觉-反馈控制的能力,能进行识别、选取判断。使 机器人具有了初步的智能。因而传感器的采用与 否已成为衡量第二代机器人的重要特征。
什么是Robot?
什么是Robot?
a machine that can do some tasks that a human can do and that works automatically or is controlled by a computer。
机器人的发展历史—《列子·汤问篇》
课程考核方法
本课程采用课程论文作为主要考核方式; 结合学生平时成绩和实验成绩;
平时成绩占20% 实验成绩占30% 课程论文成绩占50%
机器人技术作为20世纪人类最伟大的发明 之一,自上世纪四十、五十年代问世以来, 经历了60年的发展已经取得了长足的进步! 在人们的生产生活的很多领域发挥着越来越 重要的作用。
课程主要教学内容
理论教学(24学时)
移动机器人发展历程与体系结构(1学时) 移动机器人的感知技术(6学时) 移动机器人的定位技术(5学时) 移动机器人的路径规划(6学时) 移动机器人的运动控制技术(6学时)
实验教学(8学时)
机器人结构认识(1学时) 机器人传感器的使用(2学时) 机器人运动控制(3学时) 机器人避障实验(2学时)
数恶劣地形,如雪地、 山区、沙地等。
双足机器人—ASIMO
生产商:HONDA 自重:54Kg 身高:130cm 持重:
单手:0.3Kg 双手:1.0Kg
速度:
通常步行时0~2.7km/h 持重行走时1.6km/h 直线行走时6.0km/h 旋回行走时5.0km/h
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
自主移动机器人
Spirit & Opportunity
轮式移动机器人—Nomad
大小:2.4*2.4*2.4(m) 重量:725Kg 速度:0.5m/s GPS定位
履带式移动机器人—PackBot 510
机器人控制理论和技术1
课程简介
教学内容:机器人的基本结构组成、工作原理、控制及分 析方法。 教学目标:使学生通过本课程的学习,了解当前国内外机 器人控制的研究、应用状况以及发展趋势,初步具备机器 人控制系统的设计能力,提高学生分析问题和解决问题的 能力。 教材:《自主移动机器人导论》,Siegwart著,李人厚译, 西安交通大学出版社,2006年9月
时间:(约公元前1054年—公元前949年)西周 ቤተ መጻሕፍቲ ባይዱ人物:周穆王,偃师,伶人
“Robot”一词最早出现在哪位作者的著 作中?
Geoge Devol
Norbert Wiener
Isaac Asimov
Karel Capek
“Robot”一词最早出现在哪位作家的小说中? A. Norbert. Wiener B. Isaac Asimov C. Karel Capek D. Geoge Devol
第三代机器人为高一级的智能机器人,“智能化” 是这代机器人的重要标志。
第一代工业机器人的代表
1961年,通用汽车公司生产线 Unimate and Joseph Engelberger
机器人的发展历史
第一代机器人是一种进行重复操作的机械、主要 是通常所说的机械手,它虽配有电子存储装置, 能记忆重复动作,然而因未采用外部传感器,所 以没有适应外界环境变化的能力。
The word `robotic' also comes from science fiction - it first appeared in the short story `Runaround' (1942) by Isaac Asimov. This story was later included in Asimov's famous book `I, Robot.'
自重:19公斤 负重:20公斤 行进速度:2.5m/s 连续运行时间:10h 其它特性:防水
四腿机器人——BigDog
Boston Dynamics
Name:BigDog 自重:234lbs 负重:340lbs 速度:6.4km/h 爬坡角:35度 特点:可适应绝大多
“Robot”的来源
The word `Robot' comes from the 1920 play `R.U.R.' (Rossum's Universal Robots) by the Czech writer Karel Capek. `Robot' comes from the Czech word `robota', meaning `forced labor.'