全国大学生西门子杯工业自动化挑战赛设计开发型赛项总决赛评分规则
智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯

智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯》是由主办方举办的一项比赛。
比赛的目的是促进智能制造工程设计与应用在离散行业运动控制方向的发展。
比赛将聚焦于离散行业的运动控制技术,并鼓励参赛者展示他们在此领域的创新,并创造解决方案以应对相关的挑战。
比赛的内容将涵盖各种离散行业中的运动控制问题,例如物流自动化、工厂生产线优化、机器人控制等。
参赛者需在给定的场景下设计和应用智能制造工程,以实现高效的运动控制。
比赛要求参赛者具备在离散行业的运动控制方向上的技术知识和创新能力,并能运用___相关技术进行解决方案的设计和实施。
该比赛举办方为___,他们致力于推动智能制造工程在离散行业运动控制方向的应用,并提供支持和指导,以促进参赛者在这一领域的专业发展。
通过这项比赛,参赛者将有机会展示他们的技能和能力,并与业内专家和顶尖企业进行交流和合作,共同推动智能制造工程的创新与应用。
《智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯》参赛资格该比赛举办方为___,他们致力于推动智能制造工程在离散行业运动控制方向的应用,并提供支持和指导,以促进参赛者在这一领域的专业发展。
通过这项比赛,参赛者将有机会展示他们的技能和能力,并与业内专家和顶尖企业进行交流和合作,共同推动智能制造工程的创新与应用。
《智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯》参赛资格参加《智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯》的条件包括以下要求:参加《智能制造工程设计与应用类赛项离散行业运动控制方向-西门子杯》的条件包括以下要求:学历要求:参赛者应该具备本科及以上学历,专业背景应与智能制造工程设计与应用、离散行业运动控制等相关领域相符。
参赛队伍:参赛队伍由3至5名队员组成。
队员之间可以来自不同学校或院系,也可以来自不同专业背景,但都应该满足学历要求。
最新全国大学生西门子杯工业自动化挑战赛工程设计文件资料

4)运行保护
为安全起见,在门区外,系统设定不能开门。
在非检修状态,电梯运行过程中,如果连续运行了运行时间限制器规定的时间后,其中没有平层开关动作过,系统就认为检测到钢丝绳打滑故障,所以就停止轿厢的一切运行,直到断电复位或转到检修状态时,才能恢复正常运行。
3)错误指令消除
当电梯到达最远层站将要反向时,原来所有后方登记的指令全部消除。连按2次错误指令的按钮,该等级的信号就被取消。
4)开门延时/关门保护
无司机运行时,电梯到站自动开门后,延时若干时间自动关门。在关门过程中,当安装在轿厢门口的光电信号或机械保护装置探测到有人或物体在此区域时,立即重新开门。
5)待载休眠
2015年全国大学生西门子杯工业自动化挑战赛工程设计文件
ITEM2逻辑控制赛项
参赛队伍名称:
参赛学校名称:
2015年6月28日
一、方案设计依据、范围及相关标准
1、方案设计依据
(1)全国大学生西门子杯工业自动化挑战赛逻辑控制赛项高校组初赛赛题及初赛细则;
(2)六层电梯逻辑控制仿真及设备用户手册等;
(3)SIMATIC S7-1200使用手册及产品目录。
图1理想速度曲线
在系统的制动段,既要对减速度进行必要的控制,以保证舒适感,又要严格地按电梯运行的速度和距离的关系来控制,以保证平层的精度。在系统的转速降至120r/min之前,为了使两者得到兼顾,采取以加速度对时间控制为主,同时根据在每一制动距离上实际转速与理论转速的偏差来修正加速度给定曲线的方法。
2、方案设计范围
本逻辑控制功能包括:六层电梯的单部电梯基本功能(集选控制、开关门控制、错误指令消除、开门延时/关门保护、待载休眠),单部电梯运行(异常)状态监测(超载保护、终端越程保护、开关门保护、运行保护),集群电梯的群控实现等。并在SIMATIC S7-1200 PLC上完成控制算法组态及SIMATIC WINCC上完成监控环境组态,建立PLC和WINCC之间的通讯连接。
2019年西门子杯中国智能制造挑战赛
2019年西门子杯中国智能制造挑战赛2019年“西门子杯”中国智能制造挑战赛安徽省赛区暨华东三分赛区竞赛赛项规程一、赛项名称赛项名称:2019年“西门子杯”中国智能制造挑战赛安徽省赛区暨华东三分赛区竞赛英语翻译:2019 "Siemens Cup" China Intelligent Manufacturing Competition in Anhui Province(originally called National College Students Industrial Automation Challenge), the Third Competition Zone in Eastern China赛项组别:智能制造工程设计与应用类赛项共五个组别,流程行业自动化方向--本科组、流程行业自动化方向--高职组、离散行业自动化方向--本科组、离散行业自动化方向--高职组、信息化网络化方向--高职组。
二、竞赛组织机构主办单位:安徽省教育厅承办单位:安徽工业大学安徽职业技术学院(一)组织委员会主任委员:储常连安徽省教育厅副厅长执行主任委员:魏先文安徽工业大学校长孙敬华安徽职业技术学院校长副主任委员:祖明安徽工业大学党委副书记梁祥君安徽省教育厅高教处处长史锋安徽职业技术学院副校长委员:檀俊安徽省教育厅高教处副处长吴一戎中国科学技术大学信息科学技术学院院长何怡刚合肥工业大学电气与自动化工程学院院长高清维安徽大学电气工程与自动化学院院长刘晓东安徽工业大学电气与信息工程学院院长李敬兆安徽理工大学电气与信息工程学院院长江巨浪安庆师范大学物理与电气工程学院副院长凌有铸安徽工程大学电气工程学院院长张润梅安徽建筑大学机械与电气工程学院院长章毛连安徽科技学院电气与电子工程学院院长张晓东皖西学院机械与车辆工程学院院长王庆龙合肥学院电子信息与电子工程系系主任刘增良铜陵学院电气工程学院院长郭焕银宿州学院机械与电子工程学院院长计勇安徽新华学院电子通信工程学院院长洪应安徽职业技术学院机电工程学院副院长(二)专家委员会主任:祖明安徽工业大学党委副书记副主任:刘晓东安徽工业大学电气与信息工程学院院长李敬兆安徽理工大学电气与信息工程学院院长委员:雷经发安徽建筑大学机械与电气工程学院副院长臧大进铜陵学院电气工程学院副院长方明星安徽师范大学物理与电子信息学院自动化专业负责人王冠凌安徽工程大学电气工程学院大学生创新训练中心主任赵卫东安徽工业大学电气与信息工程学院电气工程及自动化系主任刘升安徽工业大学电气与信息工程学院测控技术与仪器系副主任谢军安徽职业技术学院机电工程学院教研室主任(三)仲裁委员会主任:张贝克大赛组委会秘书长、北京化工大学教授副主任:刘晓东安徽工业大学电气与信息工程学院院长教育部高等学校自动化类教学指导委员会成员(名单全国组委会讨论确定)委员:北京化工大学、安徽工业大学、西门子公司相关领导和老师(名单全国组委会讨论确定)(四)秘书处安徽工业大学电气与信息工程学院安徽工业大学创新教育学院安徽职业技术学院机电工程学院秘书长:冷护基安徽工业大学创新教育学院院长副秘书长:聂建华安徽工业大学电气与信息工程学院副院长洪应安徽职业技术学院机电工程学院副院长秘书:张卉安徽工业大学创新教育学院创新实践部主任李修正安徽工业大学电气与信息工程学院学生办公室钱晓东安徽职业技术学院机电工程学院三、竞赛目的“西门子杯”中国智能制造挑战赛(原全国大学生工业自动化挑战赛)是由教育部高等学校自动化类专业教学指导委员会、中国系统仿真学会、西门子(中国)有限公司联合主办,以模拟的典型工业自动化系统为对象的工程科技竞赛,是面向全国自动化、机电一体化相关专业大学生高职、高专学生的一项创新性科技活动,也是教育部质量工程资助的大学生科技竞赛之一。
综合能力考评分细则
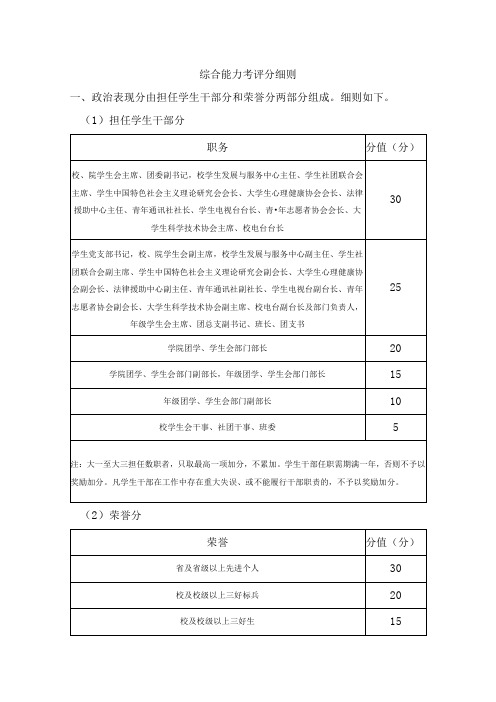
综合能力考评分细则
一、政治表现分由担任学生干部分和荣誉分两部分组成。
细则如下。
(1)担任学生干部分
(2)荣誉分
(3)学生在校期间参军入伍服兵役、参加志愿服务、到国际组织实习并表现突出的,加30分。
二、参展参赛获奖
(1)创作作品(第一作者)参加由中华人民共和国文化和旅游部、中国文学联合会和中国美术家协会共同主办的五年一届全国美术作品展,作品获进京作品及以上,每件作品加80分,入选每件作品加60分。
(2)参加教育部主办大学生竞赛展演并获优秀奖以上(含优秀奖),每项奖项加50分。
(3)参加教育部认可的34项大学生竞赛展演(详见附件2)并获优秀奖以上(含优秀奖),每项奖项加50分。
参加“挑战杯”“互联网“创青春,,等学科竞赛获奖学生参照学校相应文件推免,不加分。
三、发表专业学术论文
(4)以第一作者署名及福建师范大学为单位在A、B类刊物上发表学术论文,学术期刊目录以发表时间当年度《福建师范大学AB类学术期刊目录》文件为准,每篇加80分。
(5)以第一作者署名及福建师范大学为单位在南大CSSC1核心期刊发表学术论文(含扩展版),学术期刊目录以发表时间当年度的南大《CSSCI 核心期刊目录》文件为准,每篇加60分。
(6)以第一作者署名及福建师范大学为单位在非CSSC1刊物的七大核心上发表专业学术论文,每篇加10分。
教育部认可的34项大学生竞赛展演。
西门子杯全国大学生过程控制仿真挑战赛设计方案第I页
西门子杯全国大学生过程控制仿真挑战赛设计方案第I页西门子杯全国大学生过程控制仿真挑战赛设计方案第I页西门子杯全国大学生过程控制仿真挑战赛1 被控对象工艺流程概述............................................................................ .. (1)2 系统设计............................................................................ .. (3)2.1 DCS系统概述............................................................................ (3)2.2 系统软件安装设置............................................................................ .. (3)2.3 硬件结构及网络层次............................................................................ . (4)3 控制方案设计............................................................................ (6)3.1 进料流量控制方案............................................................................ .. (6)3.1.1 比值控制系统特点............................................................................ .. (6)3.1.2 比值控制系统主动量的选择............................................................................ .63.1.2 进料流量的变比值控制方案............................................................................ .63.1.4 控制器规律的选择............................................................................ .. (9)3.1.5 比值控制系统中控制器正、反作用的选择 (9)3.2 反应器料位控制方案............................................................................ .. (10)3.2.1 串级控制系统的特点............................................................................ .. (10)3.2.2 反应器料位串级控制系统............................................................................ (10)3.2.3 串级控制系统中主、副控制器规律的选择 (11)3.2.4 串级控制系统中主、副控制器正、反作用的选择 (12)3.3 反应温度及升温速率控制方案............................................................................ .123.3.1 模糊分程控制方案............................................................................ (12)3.3.2 模糊控制系统的参数设计............................................................................ (15)3.3.4 具有压力补偿的反应釜温度控制 (15)3.4 反应器压力安全控制及联锁保护 (17)3.5 反应器组分控制............................................................................ . (18)3.6 开车步骤顺序控制............................................................................ (19)4 结论............................................................................ . (21)附录............................................................................ .. (22)基于PCS7的带搅拌釜式反应器系统的控制方案的带搅拌釜式反应器系统的控制方案1 被控对象工艺流程概述被控对象工艺流程概述所选被控对象为过程工业常见的带搅拌釜式反应器(CSTR)系统,属于连续反应过程。
西门子杯中国智能制造挑战赛智能制造创新研发类赛项

“西门子杯”中国智能制造挑战赛智能制造创新研发类赛项:自由探索方向初赛说明1. 此文件说明了比赛的流程、规则,强调了注意事项、具体要求。
2. 赛前抽签决定各队比赛组别与组内序号,分组进行比赛。
3. 赛项主要环节包括:原型机准备、提交参赛方案、正式比赛(比赛环节包括原型机测评、方案展示等)。
(1)原型机准备:⚫参赛队需携带产品原型机来参赛。
⚫参赛队原型机应在正式比赛前一天调试完毕,并在原型机展示室的指定摆放区域内分组依序进行摆放。
⚫调试完毕后,参赛队应在原型机明显处粘贴上产品的完整名称。
⚫参赛队原型机有使用非西门子品牌产品的,请参考《2019年西门子杯中国智能制造挑战赛智能制造创新研发类赛项:自由探索方向赛题》的相关规定说明,必要处进行遮挡处理。
⚫参赛队如有特殊需求应在比赛前一天与工作人员沟通并完成准备工作,正式比赛期间只能进行展示,不允许再对原型机及环境进行改动。
(2)提交参赛方案在比赛报到当天,所有参赛队必须按规定的时间和地点提交参赛方案。
已提交的方案不能再更新、修改。
参赛方案需提交两种:a. 电子版。
a)提交1份PPT(用于方案展示环节)、1份PDF(完整的参赛方案)、产品SolidEdge模型源文件(包括各零配件par格式模型、dft图纸;装配体asm格式模型、dft图纸等)给工作人员。
文件名命名为《组号+组内序号-参赛队编号》。
拷贝至展示用计算机时,确认可以正常演示(如不能正常演示,后果自负)。
如有其它视频、三维等附加电子文档,应一并拷入分赛区准备的计算机。
在截止时间后至正式比赛前这段期间内,不能再添加新的展示内容。
b. 5份纸质版(以分赛区要求为准)。
a)封面统一命名《组号+组内序号-参赛队编号》。
(建议赴分赛区之前打印好,封面名称可手写)。
b)用于专家评审时查阅,确保每位评审专家1份。
c)纸质版方案现场提交工作人员,分组装入信封并贴封口条,信封注明:组号,然后由工作人员保管。
参赛方案的要求(包括电子版与纸质版):1)条理清晰,版面整洁。
北京联合大学学生在“西门子杯”工业自动化挑战赛全国总决赛中获佳绩
北京联合大学学生在“西门子杯”工业自动化挑战赛全国总决赛中获佳绩佚名【摘要】2012年8月,在2012年全国大学生“西门子杯”工业自动化挑战赛全国总决赛中,北京联合大学“联大梦之队”技压群雄,在工程应用型竞赛组中,不仅以总分第一的成绩获得一等奖,而且获得“最佳实施奖”和“最佳抗扰奖”。
北京联合大学“德鑫研”队在设计开发型竞赛组中,与东北大学、北京理工大学、中国石油大学等重点高校的参赛队同场竞技,最后荣获二等奖。
【期刊名称】《北京联合大学学报(自然科学版)》【年(卷),期】2012(026)004【总页数】1页(P4-4)【关键词】北京联合大学;工业自动化;西门子;大学生;北京理工大学;中国石油大学;东北大学;应用型【正文语种】中文【中图分类】TP2782012年8月,在2012年全国大学生“西门子杯”工业自动化挑战赛全国总决赛中,北京联合大学“联大梦之队”技压群雄,在工程应用型竞赛组中,不仅以总分第一的成绩获得一等奖,而且获得“最佳实施奖”和“最佳抗扰奖”。
北京联合大学“德鑫研”队在设计开发型竞赛组中,与东北大学、北京理工大学、中国石油大学等重点高校的参赛队同场竞技,最后荣获二等奖。
本次比赛由校教务处统一组织参赛,北京联合大学共有来自机电学院和自动化学院的6个参赛队参加了本次比赛。
自动化学院派出了4个队,由李红星教授领队,李媛、张益农、苏秀丽、钱琳琳、任俊杰老师参与指导;机电学院派出了2个代表队,由王淑芳、刘长青老师指导,他们在暑假期间为参赛学生进行了培训和训练。
通过参与这一赛事,充分展示了北京联合大学人才培养质量的提升和联大学子的风采,不仅给赛事主办者以及参赛院校留下了深刻印象,学生的专业素质更是得到了评判专家的高度赞许。
该项赛事是由教育部高等学校自动化专业教学指导分委员会、西门子(中国)有限公司和中国系统仿真学会联合主办,面向全国自动化、机电一体化相关专业大学生的一项创新性科技活动。
本项大赛是教育部认可的大学生竞赛活动之一,得到了教育部质量工程的资助。
工业自动化挑战赛ITEM逻辑控制赛项工程设拓梦者队计文件
根据电梯主电路完成按时间原则的启动、停止过程。当电梯平层时,需要依时间原则依次触发三级制动减速,待平层后,切断上行、下行接触器,抱闸停车。
5)运行控制
在运行过程中,需要始终对当前运行方向、当前楼层(采用七段数码管显示)进行实时监控与显示。通常,乘客会根据当前电梯运行方向及电梯门是否打开进行判断后上车。仅当无呼叫指令时,运行方向指示无指向。
及板载模拟量输入组合到一个设计紧凑的外壳中来形成功能强大的控制器。 在您下载用户程序后,CPU 将包含监控应用中的设备所需的逻辑。CPU 根据用户程序逻辑监视输入并更改输出,用户程序可以包含布尔逻辑、计数、定时、复杂数学运算以及与其它智能设备的通信。
各种新模块扩展了S7-1200 CPU 的功能,因而能够灵活地满足您的自动化需要:
图5信号处理原则框图
开、关门控制,到达某一层响应了该层的信号要求,则开门到位后5S后关门,关门指示灯闪烁,当长按开门则开门等待(轿门自动打开),或遇到红外光幕信号未响应、超重感应器动作则门开等待,自动状态下,在保持开门的状态时,可以按关门按钮使门立即响应关门动作。电梯停在门区时,可以在轿厢中按开门按钮使电梯已经关闭或尚未关闭的门重新打开。开门等待信号关闭后3S后关门电梯未起动且门已关上或正在关闭时,如果本层召唤按钮被按下,则电梯门打开。如果按住按钮不放,门保持打开。
二、系统分析
2.1甲方需求分析
针对3部多层电梯实施联合控制,满足常见不同应用场合下集群电梯的控制策略切换。具体来讲,需要考虑三方面因素:
1)乘客平均候梯时间;
2)乘客平均乘梯时间;
3)系统整体能耗。
2.1.2 WINCC监控画面
要求能够实现对电梯运行状况的实时监控,所需包含的内容有:
1)整个电梯系统当前状态,包含故障、风扇、照明状态指示,以及关键传感器信号状态指示;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全国大学生西门子杯工业自动化挑战赛设计开发型赛项
总决赛评分规则
设计开发型赛项总决赛成绩满分100分,由工程现场实施与方案答辩两部分组成,分值分配如下:
一、工程现场实施评分规则
工程现场实施环节满分70分,由硬件接线、系统实现和扰动测试两部分组成,分值分配如下:
1.硬件接线规则
硬件接线比赛环节,30分钟之内,要求将PCS 7远程IO中的AI模块与SMPT-1000仪表测量输出模块进行接线,并确保通讯正常。
硬件接线成绩由裁判组给出,对线缆连接及配置(满分100分,权重0.04)、系统通讯(满分100分,权重0.06)进行打分。
具体评分规则如下:
硬件接线的详细评分依据参见《2015年全国大学生西门子杯工业自动化挑战赛设计开发型赛项硬件接线评分表》,最终以表格形式报告评分结果。
2.系统实现规则
系统实现比赛环节中要求30分钟之内,系统快速、平稳投运,在开车过程中维持各动态指标在要求范围内,系统稳定运行后保持各稳态指标在要求范围内。
系统实现成绩由自动评分系统(2015版)给出,对开车过程、控制效果、能耗产量以及稳定与安全指标进行综合打分。
评分过程由裁判组监督并确认。
具体评分规则如下:。