超声波测距系统的仿真
基于Proteus的温控超声波测距半物理仿真系统设计

RS -232-C 异步串行接口将实物与仿真连接进行通信,电路还需搭载MAX232电平转换芯片。
具体连接过程为下位机通过RS -232-C 异步串行接口与PC 机接口相连,上位机中的COMPIM 虚拟接口编号设置为与下位机相连的PC 机的接口编号。
整体系统通过上位机与下位机之间的相互通信,实现温度检测、超声波测距及警报功能。
2 电路设计2.1 下位机电路设计由于Proteus 中超声波模块和蜂鸣器模块,与实物使用存在一定差别,为使实验便于操作,实验结果更加直观,设计如图2所示的下位机电路,该电路搭载有电源模块、RS -232-C 异步串行接口、蜂鸣器模块、单片机控制模块、DS18B20温度传感器、MAX232电平转换模块以及HC -SR04超声波测距模块。
可实现目标距离和环境温度的测量,将测量到的信息上传给上位机进行数据处理,并将处理好的数据发回实物单片机上,控制警报系统。
2.2 上位机电路设计在Proteus 中搭建如图3所示的上位机电路,该部分由LCD1602液晶显示模块、STC89C516控制模块、MAX232电平转换模块、RS -232-C 模块以及LED 状态指示模块组成。
由于上位机与下位机通过RS -232-C 异步串行接口相连,上位机电路的晶振频率应与实物电路的晶振频率相同为12MHz 。
当下位机将测得的数据传输给上位机时,上位机开始处理数据,并控制LCD1602实时显示目标距离。
如果目标距离小于20cm ,红色指示灯亮起,并将处理好的数据传输给下位机,使下位机发出警报,否则,绿灯亮起。
图1 系统总体框架示意图图2 下位机电路图图3 上位机电路图3 系统软件设计3.1 超声波测距模块原理本实验采用型号为HC-SR04的超声波测距模块,该模块集成有超声波发射器、接收器与控制电路,具有性能高,精度高,盲区小等优点[8]。
其工作时序图如图4所示,当单片机I/O口发送一个至少10µs以上的高电平至该模块的Trig控制信号输入引脚时,超声波测距模块内自动发出8个方波信号,其周期为40kHz,同时检测是否有返回信号。
汽车倒车雷达的Simulink仿真测试
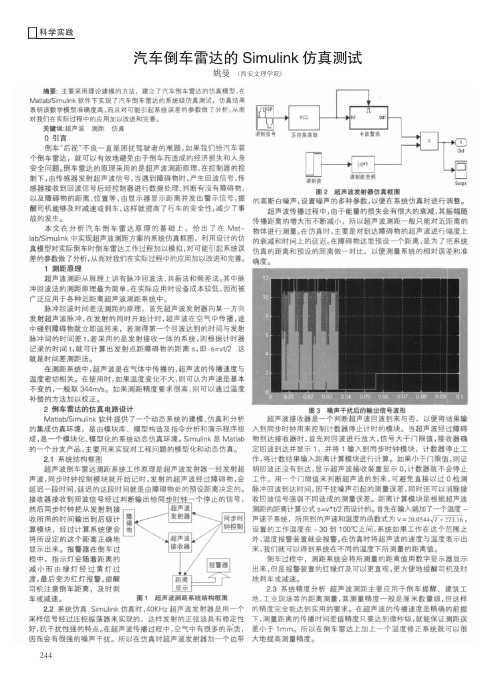
科学实践汽车倒车雷达的Simulink 仿真测试姚曼(西安文理学院)图3噪声干扰后的输出信号波形图1超声波测距系统结构框图障碍物超声波发射器超声波接收器距离显示同步时钟控制报警器摘要:主要采用理论建模的方法,建立了汽车倒车雷达的仿真模型,在Matlab/Simulink 软件下实现了汽车倒车雷达的系统级仿真测试,仿真结果表明该数学模型准确度高,而且对可能引起系统误差的参数做了分析,从而对我们在实际过程中的应用加以改进和完善。
关键词:超声波测距仿真0引言倒车“后视”不良一直是困扰驾驶者的难题,如果我们给汽车装个倒车雷达,就可以有效地避免由于倒车而造成的经济损失和人身安全问题。
倒车雷达的原理采用的是超声波测距原理,在控制器的控制下,由传感器发射超声波信号,当遇到障碍物时,产生回波信号,传感器接收到回波信号后经控制器进行数据处理、判断有没有障碍物,以及障碍物的距离、位置等,由显示器显示距离并发出警示信号,提醒司机能够及时减速或刹车,这样就提高了行车的安全性,减少了事故的发生。
本文在分析汽车倒车雷达原理的基础上,给出了在Mat-lab/Simulink 中实现超声波测距方案的系统仿真框图,利用设计的仿真模型对实际倒车时倒车雷达工作过程加以模拟,对可能引起系统误差的参数做了分析,从而对我们在实际过程中的应用加以改进和完善。
1测距原理超声波测距从原理上讲有脉冲回波法、共振法和频差法。
其中脉冲回波法的测距原理最为简单,在实际应用时设备成本较低,因而被广泛应用于各种近距离超声波测距系统中。
脉冲回波时间差法测距的原理,首先超声波发射器向某一方向发射超声波脉冲,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,若测得第一个回波达到的时间与发射脉冲间的时间差t ,若采用的是发射接收一体的系统,则根据计时器记录的时间t ,就可计算出发射点距障碍物的距离s ,即:s=vt/2.这就是时间差测距法。
在测距系统中,超声波是在气体中传播的,超声波的传播速度与温度密切相关。
基于超声波测距的模拟自动跟车系统设计

基于超声波测距的模拟自动跟车系统设计作者:李亚兰来源:《电脑知识与技术》2019年第22期摘要:随着ADAS技术研究的深入,自动跟车系统的设计成为研究的重点,而跟车过程中,跟车距离的实时调整性成为技术的难点。
本文采用超声波测距和程序PWM调整的方法实现跟车行进中的实时性。
系统通过超声波传感器测量距离,L298N为电机驱动模块,以单片机为控制器,实现跟车的速度和距离的精确控制,同时用LCD1602显示当前的距离值。
关键词:ADAS;自动跟车;超声波测距中图分类号:TP311; ; ; 文献标识码:A文章编号:1009-3044(2019)22-0244-02开放科学(资源服务)标识码(OSID):<E:\知网文件\电脑\电脑22-24\22\7xs201922\Image\image1_1.png>随着交通运输业的发展,交通安全问题日益严重,将智能控制技术引入车载系统成为降低交通事故的一种重要手段,因此,汽车先进辅助驾驶系统[1]成为全球汽车电子研究的热点,自动跟车技术则为该辅助驾驶系统的主要部分,由于超声测距是一种非接触检测技术,不受光线、雾霾以及被测对象颜色等因素的影响,在较恶劣的环境下具有很强的适应能力,因此文中的自动跟车设计采用超声波传感器测距,再通过所测距离自动调整与前车的距离和跟车的速度,形成一种闭环式的自动控制系统,达到不撞车、不丢车的跟车状态。
1系统方案框图系统总体框图如图1所示,系统由MCU、L298N电机驱动、HC-SR04超声波传感器、LCD1602显示屏、电源电路组成。
超声波传感检测本车与前车的实时距离,本文采用两个超声波模块,分别放在小车的左前方和右前方;MCU发出测距指令、接受距离数据并进行数据处理,将测量结果转换为PWM值输出给电机驱动单元电路L298N,通过控制电动机的转速达到控制小车加速、减速、转向,并保持与前车的适当距离。
LCD1602用于显示小车的行进状态参数。
14超声波测距仪的设计与调试——系统联调
超声波测距仪的设计与调试——系统联调
当A点(IC5的反相端)过来的脉冲信号电压高于0.4V时, B点电压将由高电平"1"到低电平"0"。同时注意到在IC5的同相 端接有电容C11和二极管D3,这是用来防止误检测而设置的。 在实际测量时,在测距仪的周围会有部分发出的超声波直接进 入接收头而形成误检测。为避免这种情况发生,这里用D3直 接引入检测脉冲来适当提高IC5比较器的门限转换电压,并且 这个电压由C11保持一段时间,这样在超声波发射器发出检测 脉冲时,由于D3的作用使IC5的门限转换电压也随之被提高, 并且由于C11的放电保持作用,可防止这时由于检测脉冲自身 的干扰而形成的误检测。由以上可知,当测量距离小到一定程 度时,由于D3及C11的防误检测作用,其近距离测量会受到影 响。图示参数的最小测量距离在40cm左右。减小C11的容量, 在环境温度为20 时可做到30cm测量最短距离。此时其放电时 间为1.75ms。
超声波测距仪的设计与调试——系统联调
C21用于控制显示部 分的刷新频率,当 C21为1000pF时,刷 新频率为1100Hz, 由U9、LED1-LED3、 TR1-TR3组成显示 电路。
超声波测距仪的设计与调试——系统联调
四、调试
1、调整发射接收电路
把IC1从插座上拔下,并短接IC1插座的1和3脚,这时
超声波测距仪的设计与调试——系统联调
MC14553
超声波测距仪的设计与调试——系统联调
三、超声波测距仪工作原理
IC5、U6、U7、U8、U9组成信号比较、测量、计数和显 示电路,即比较和测量从发出的检测脉冲和该脉冲被反射回来 的时间差。下面分析其工作原理。
R12
R13
Control
超声波测距仿真流程

超声波测距仿真流程1.引言1.1 概述概述部分的内容可以描述超声波测距的背景和重要性,以及本文将要介绍的超声波测距仿真流程。
首先,超声波测距是一种常用的非接触式距离测量技术,通过利用超声波在空气中传播的特性来测量目标物体与传感器之间的距离。
超声波测距技术广泛应用于工业、医疗和安防等领域,因其测量精度高、响应速度快、无辐射等优势而备受关注。
本文将重点介绍超声波测距仿真流程,通过利用计算机模拟的方法,在虚拟环境中模拟超声波的传播和接收过程,并根据物体与传感器的距离推算出相应的测量结果。
通过仿真可以帮助研究人员深入理解超声波测距的原理和技术,并为实际应用提供参考和指导。
接下来的章节将详细介绍超声波测距的原理和仿真方法。
首先,我们将介绍超声波测距的基本原理,包括超声波的产生、传播和接收过程,以及如何根据测量结果计算目标物体与传感器之间的距离。
然后,我们将详细阐述超声波测距仿真的方法,包括建立虚拟环境、选择合适的仿真模型和参数设置等,以及如何通过仿真得到准确的测量结果。
在结论部分,我们将对本文进行总结,并展望超声波测距仿真技术的未来发展方向。
超声波测距仿真技术具有广阔的应用前景,可用于产品设计验证、算法优化和系统性能评估等方面,在实际应用中发挥重要作用。
我们希望本文能够为读者提供一种深入了解超声波测距原理和仿真流程的方法,促进超声波测距技术的研究和应用。
1.2文章结构文章结构部分内容示例:1.2 文章结构本文主要从超声波测距的原理和仿真方法两个方面展开讲解。
首先会对超声波测距的概念和应用进行概述,介绍其在工业、医疗、安防等领域的重要性和广泛应用。
然后,文章会详细阐述超声波测距的原理,包括超声波的发射和接收机制,以及相关的物理特性,为后续的仿真建模做好理论准备。
接下来,将重点探讨超声波测距的仿真方法。
我们将介绍不同种类的超声波传感器模型,如时域模型和频域模型,并对它们的优缺点进行分析和比较。
同时,还会介绍一些常用的仿真软件和工具,如MATLAB和COMSOL Multiphysics,用于实现超声波测距仿真模型的搭建和分析。
超声波测距系统的研究与实现
超声波测距系统的研究与实现一、本文概述超声波测距系统是一种非接触式的距离测量技术,它利用超声波在空气中的传播速度以及回波接收时间来计算目标物体的距离。
由于其具有测量准确、响应速度快、无需直接接触目标物体等优点,超声波测距系统被广泛应用于各种工业、军事和民用领域,如机器人导航、车辆倒车雷达、障碍物检测等。
本文旨在深入研究和实现超声波测距系统,包括其基本原理、硬件设计、软件编程以及实际应用等方面。
我们将首先介绍超声波测距的基本原理和关键技术,然后详细阐述系统的硬件设计和软件编程过程,包括超声波发射器、接收器、微处理器等关键部件的选择和配置,以及信号处理算法的实现。
我们将通过实际测试和应用案例来验证系统的性能和可靠性,并探讨其在实际应用中的优缺点和改进方向。
通过本文的研究和实现,我们希望能够为超声波测距系统的设计和应用提供有益的参考和借鉴,推动该技术的进一步发展和应用。
二、超声波测距原理及关键技术超声波测距系统是一种非接触式的距离测量技术,其基本原理是利用超声波在空气中的传播速度以及传播时间来计算距离。
当超声波发射器发出超声波信号后,这些声波在空气中传播,遇到障碍物后被反射回来,被接收器接收。
由于超声波在空气中的传播速度(约为340米/秒)是已知的,因此可以通过测量发射和接收超声波信号之间的时间差来计算超声波信号传播的距离,从而得到发射器与障碍物之间的距离。
超声波发射与接收技术:超声波发射器通常采用压电陶瓷换能器,其能够将电能转换为机械能,从而发出超声波信号。
接收器则同样使用压电陶瓷换能器,将接收到的超声波信号转换为电信号进行处理。
信号处理技术:接收到的超声波信号往往受到环境噪声的干扰,因此需要进行信号滤波和放大,以提高信号的信噪比。
还需要对信号进行阈值判断,以确定超声波信号的起始和结束时间,从而准确计算时间差。
时间测量技术:时间测量的准确性直接影响到测距的精度。
常用的时间测量方法包括阈值法和渡越时间法。
超声波测距信号实时降噪滤波算法仿真与应用
第35卷第5期科技通报Vol.35No.5 2019年5月BULLETIN OF SCIENCE AND TECHNOLOGY May2019超声波测距信号实时降噪滤波算法仿真与应用苏晨I,张朋2,常静$(1.河南工学院,河南新乡453003; 2.中原工学院,郑州450007)摘要:针对目前油井超声液面深度测试系统测量噪声大,测量范围小、结果误差大、测量精度低的问题,提出一种新型超声波信号高效降噪和滤波算法。
采用自回归积分滑动平均模型建模方法对油井套管中的超声波序列建立ARIMA数学模型体系;运用高精度新息自适应卡尔曼滤波算法实时估计超声波序列中的液面回波;采用液面波自动识别技术检测微弱液面回波。
仿真和工程应用结果表明,算法实时、高效,动液面深度测量误差小,能满足实际工程应用。
关键词:超声波检测;波自动识别技术;卡尔曼滤波;时间序列;自回归积分滑动平均模型中图分类号:TN391文献标识码:A文章编号:1001-7119(2019)05-00107-04DOI:10.13774/ki.kjtb.2019.05.020Research on Real-time Denoise Filtering Algorithm forUltrasonic Ranging SignalSu Chen1,Zhang Peng2,Chang Jing1(1.Henan University of Technology,Xinxiang453003,China;2.Zhongyuan University of Technology,Zhengzhou450007,China)Abstract:In view of the problems of large measurement noise,small measuring range,large measurement error and low measurement accuracy,a real-time ultrasonic signal denoising and filtering method based on time series model and new interest adaptive Kalman filtering is proposed.The AMRIA modeling method is used to establish an ARIMA mathematical model system for ultrasonic sequence in oil well casing.Real・time estimation of ultrasonic echo in ultrasonic sequence using high precision new interest adaptive Kalman filter algorithm.Detection of weak ultrasonic echo is realized based on the ultrasonic automatic recognition technology.The results of simulation and engineering application show that the algorithm is real-time and efficient,and the measurement error of the depth of moving surface is small,and it can meet the practical engineering application very well.Keywords:ultrasonic testing;automatic wave recognition technology;kalman filtering;time series;autoregressive integrated moving average model油井动液面深度测量系统UN主要由信号获取、算法处理、综合实现三部分构成。
超声波测距系统一个仿真研究

论文1:超声波测距系统一个仿真研究Sanda-Ioana MORAR, Amar AGGOUN, Mircea-David MORAR德蒙福特大学计算机科学与工程系电话+44 (0)116 255 1551,传真+44 (0)257 7692,邮箱:aggoun@, mis@. mdmorar@摘要:这篇论文的目的是建立和开发一个仿真超声波测距系统的软件包,用这种方式数据可以嵌入到一个光学扫描系统。
为了实现目标将对以下几个方面进行探讨。
首先是超声波传感器的塑造。
超声波传感器的一个新模型已经开发出来了。
根据传感器的滤波和阻尼性能对其进行分解。
传播介质的模型和不同目标也被嵌入到这个仿真系统中。
这个测距系统是用这个提出的模型进行仿真的。
仿真的结果将会和实验测量的结果比较,然后进行讨论。
关键字:超声波测距,光学扫描,超声波传感器模型1,.介绍现在超声波测距是一个用于测量离目标的距离的很常见的技术。
产生的距离可以用于光学扫描系统,记录的数据转换成初始目标的准确测量。
那是一种探讨较少的研究领域,从军事到保健系统有不同的应用。
制作超声波测量系统应用最广泛的方法是Pellam和Galt在1946年提出的超声波脉冲回波法【1】。
进一步说,超声波测距系统可能会融入光学扫描系统。
对诸如人体这样目标的准确测量时非常重要的【2】。
还有其它光学扫描方法-如红外线-但是相对于超声波系统昂贵许多而且很难达到。
一个对于那些超声波系统的电脑仿真-测距或者扫描-会带来无可置疑的优势,如允许在实验室为一个具体问题建立一个模型或减少实验费用。
这会激起我们目前在这个工作里的兴趣。
这篇论文开始是关于脉冲回波法和飞行法的简要介绍。
一项关于已经存在的超声波传感器的调查被覆盖了。
论文的第二部分将介绍所推荐的仿真模型。
仿真和实验结果会进行讨论。
2.背景2.1 脉冲回波法在一个脉冲回波实验里,一个电动脉冲应用于一个超声波传感器。
超声波传感器将这个电信号转变成一个声波。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
淮海工学院课程设计报告书课程名称:单片机控制系统课程设计题目:基于单片机的超声波测距系统系(院):东港学院学期: 2013-2014-2 专业班级: D自动化111 姓名:王佳力学号: 2011130874 评语:成绩:签名:日期:1 引言超声波是指频率在20kHz以上的声波,它属于机械波的范畴。
超声波也遵循超声波是指频率在20kHz以上的声波,它属于机械波的范畴。
超声波也遵循一般机械波在弹性介质中的传播规律,如在介质的分界面处发生反射和折射现象,在进入介质后被介质吸收而发生衰减等。
正是因为具有这些性质,使得超声波可以用于距离的测量中。
随着科技水平的不断提高,超声波测距技术被广泛应用于人们日常工作和生活之中。
系统的设计主要包括两部分,即硬件电路和软件程序。
硬件电路主要包括单片机电路、发射电路、接收电路、显示电路和电源电路,另外还有复位电路和LED控制电路等。
我采用以AT89C51单片机为核心的数字显示超声波测距仪的硬件电路。
整个电路采用模块化设计,由信号发射和接收、供电、显示等模块组成。
发射探头的信号经放大和检波后发射出去,单片机的计时器开始计时,超声波被发射后按原路返回,在经过放大带通滤波整形等环节,然后被单片机接收,计数器停止工作并得到时间。
温度测量后送到单片机,通过程序对速度进行校正, 结合两者实现超声波测距的功能。
软件程序主要由主程序、预置子程序、发射子程序、接收子程序、显示子程序等模块组成。
它控制单片机进行数据发送与接收,实现数据正确显示在LED上。
另外程序控制单片机消除各探头对发射和接收超声波的影响。
相关部分附有硬件电路图、程序流程图。
实际的环境对超声波有很大的影响,如外部电磁干扰电源干扰信道干扰等等,空气的温度对超声波的速度影响也很大。
此外供电电源也会使测量差生很大的误差。
再设计的过程中考虑了这些因素,并给出了一些解决方案。
1.1设计目的和要求本次课程设计是根据“自动化专业培养计划”而制定的。
单片机控制系统课程设计是自动化专业的学生在学过相关专业课以后进行综合训练的教学环节,特别是《自动控制系统》、《单片机原理及应用》、《计算机控制技术》等专业课学完之后的一次实践教学。
其目的在于使学生在课程设计过程中能够理论联系实际,在实践中充分利用所学理论知识分析和研究设计过程中出现的各类技术问题,巩固和扩大所学知识面,为以后走向工作岗位进行设计打下一定的基础。
在设计过程中,通过课程设计,使学生了解一般电气控制系统、自动控制系统和计算机控制系统设计的过程、步骤、要求、工作内容及设计方法。
训练学生综合运用专业课的能力,提高学生工程设计的能力。
1.2设计的内容综合运用《微机原理及应用》、《单片机原理及应用》、《DSP技术原理及应用》、《计算机控制技术》和《检测技术与自动化仪表》的知识,掌握单片机控制系统的组成、原理及工作方式,了解单片机控制系统的设计步骤与方法,特别是要了解单片机系统开发的整个过程,完成系统的软、硬件设计。
2 设计电路2.1系统设计方案图2-1系统设计方案图系统计划在实验室内实现小范围测距,测试距离约为0.2m —3m 米,系统的整体结构如图2-1所示。
发射电路采用单片机 端口编程输出40kHz 左右的方波脉冲信号,同时开启内部计数器TO 。
由于单片机端口输出功率很弱,为使测量距离满足要求,驱动超声传感器UCM-40T 发射超声波距离足够远,故在此电路上加功率放大电路。
从接收传感器探头UCM-40T 传来的超声波的回波很微弱(几十个mV 级),又存在着较强的噪声,所以放大信号和抑制噪声是放大电路必须考虑的。
本系统设计此部分电路时采用一级放大和带通滤波电路,中心频率4OKHz 左右,放大滤波电路均采用了高速精密运算放大器TL082,输出信号大约在5V 左右。
由于放大电路输出的信号是连续的正弦波叠加信号,而单片机所能接受的中断响应信号常为下降沿脉冲信号,故信号在放大电路后通过LM393构成的比较电路,将正弦信号转换成方波信号,用方波的负跳变作单片机的中断输入,使得单片机知道已接收到超声信号,内部计数器停止计时。
显示电路采用动态扫描显示,主要是处于节省硬件的考虑。
通过单片机编程将内部显示模块单片机处理单元发射电路 检测电路 接收探头接受电路发射探头目标物计数得到的时间数据转换为距离信息,通过3位LED 数码管显示,数据XXX ,单位cm 。
2.2 单片机的选择本系统硬件部分由AT89C51控制器、超声波发射电路及接收电路和LCD 显示电路组成。
由单片机AT89C51编程产生10us 以上的高电平,由指定引脚输出,就可以在指定接收口等待高电平输出。
一旦有高电平输出,即在模块中经过放大电路,驱动超声波发射探头发射超声波。
发射出去的超声波经障碍物反射回来后,由超声波接收头接收到信号,通过接收电路的处理,指定接收口即变为低电平,读取单片机中定时器的值。
单片机利用声波的传播速度和发射脉冲到接收反射脉冲的时间间隔计算出障碍物的距离,并由单片机控制显示出来。
系统设计框图见图2-2。
图2-2系统设计总框图由图1-3时序图可以看出,超声波测距模块的发射端在T0时刻发射方波,同时启动定时器开始计时,当收到回波后,产生一负跳变到单片机中断口,单片机响应中断程序,定时器停止计数。
计算时间差,即可得到超声波在媒介中传播的时间t ,由此便可计算出距离。
图2-3时序图发接AT89C51 LCDDS12.3超声波部分的设计2.3.1超声波传感器的选择在超声波测量系统中,频率取得太低,外界的杂音干扰较多;频率取得太高,在传播的过程中衰减较大,检测距离越短,分辨力也变高。
本文中选用的探头是4OKHz 的收发分体式超声传感器,由一支发射传感器UCM-T40KI 和一支接收传感器UCM-R4OKI 组成,其特性参数如表2-4所示。
型号 UCM-T40K1 UCM-R40KQ 结构 开放式 开放式 使用方式 发射接收中心频率 Z KH 140± Z KH 138± 频带宽 Z KH 5.02± Z KH 5.02± 灵敏度 ubar dBV 110ubar dBV 65-声压)02.00min(115mPa dB dB =)10min(70ubar V dB dB =-指向角 o 75o 80容量pF %252500±pF %252500±图2-4 传感器UCM-T40KI 和传感器UCM-R4OKI 特性参数2.3.2超声波发射电路设计超声波发射部分是为了让超声波发射换能器TCT40-16T 能向外界发出40 kHz 左右的方波脉冲信号。
40 kHz 左右的方波脉冲信号的产生通常有两种方法:采用硬件如由555振荡产生或软件如单片机软件编程输出,本系统采用后者。
编程由单片机P1.0端口输出40 kHz 左右的方波脉冲信号,由于单片机端口输出功率不够,40 kHz 方波脉冲信号分成两路,送给一个由74HC04组成的推挽式电路进行功率放大以便使发射距离足够远,满足测量距离要求,最后送给超声波发射换能器TCT40-16T 以声波形式发射到空气中。
发射部分的电路,如图2-5所示。
图中输出端上拉电阻R31,R32,一方面可以提高反向器74HC04输出高电平的驱动能力,另一方面可以增加超声换能器的阻尼效果,缩短其自由振荡的时间。
图2-5超声波发射电路框图本系统用单片机P1.0发射一组方波脉冲信号,其输出波形稳定可靠,但输出电流和输出功率很低,不能够推动发射传感器发出足够强度的超声信号,所以在此间加入一个单电源乙类互补对称功率放大电路,如图2-6所示。
图2-6 超声波发射电路2.3接收电路的设计接收换能器晶片接收到超声波垂直作用后,因谐振而形成逐步加强的机械振动。
因压电效应晶片两面出现交变的等量异号电荷,电荷量很少,只能提供微小交变的电压信号,而不能提供电流信号。
所以需要一个前置放大电路将这一微小交变电压信号充分放大,同时考虑可能出现干扰信号,放大有用信号的同时加入滤波电路,驱动后面的比较器输出电位跳变,作为确定接收到的时刻。
前置放大电路单元的作用是对有用的信号进行放大,并抑制其它的噪声和干扰,从而达到最大信噪比,以利于后续电路的设计。
图2-7前置放大电路图电路如图2-7所示,考虑到超声换能器的输出电阻比较大(一般数百兆欧姆以上),因此前置放大器必须有足够大的输入阻抗;同时,换能器的输出电压很小(数十毫伏),这就要求前置放大电路有很高的精度、很小的输入偏置电压。
前置放大电路是由一个高精度、高输入阻抗放大器TL082及电阻R2、R和R 构成,组成反向比例放大电路,3这样可以减小地线噪声的影响。
2.4单片机LED显示电路设计显示器是一个典型的输出设备,而且其应用是极为广泛的,几乎所有的电子产品都要使用显示器,其差别仅在于显示器的结构类型不同而己。
最简单的显示器可以使LED 发光二极管,给出一个简单的开关量信息,而复杂的较完整的显示器应该是CRT监视器或者屏幕较大的LCD于显示的距离范围在4米之内,选用3位LED示,表示距离的XXXcm 数值。
液晶屏。
综合课题的实际要求由数码管,通过单片机编程实现显示,表示距离的XXXcm数值。
P1.0/T21P1.1/T2EX 2P1.2/ECI 3P1.3/CEX04P1.4/CEX15P1.5/CEX26P1.6/CEX37P1.7/CEX48RST 9P3.0/RxD 10P3.1/TxD 11P3.2/INT012P3.3/INT113P3.4/T014P3.5/T115P3.6/WR 16P3.7/RD17XTAL218XTAL119VSS 20P2.0/A8P2.1/A9P2.2/A10P2.3/A11P2.4/A12P2.5/A13P2.6/A14P2.7/A15PSEN 29ALE/PROG30EA/VPP 31P0.7/AD732P0.6/AD633P0.5/AD534P0.4/AD435P0.3/AD336P0.2/AD237P0.1/AD138P0.0/AD039VCC40AT89S51IN11IN22IN33IN44IN55IN66IN77OUT116OUT314OUT413OUT512OUT611OUT710OUT215COM9GND 8ULN2003AOE 1CLK 11D02O019D13O118D24O217D35O316D46O415D57O514D68O613D79O712VCC 20GND 1074ACQ574PC12XTALC3C21KR1C1VCCVCCK f g e d Kc DP b a Dpy Red-CCK f g e d Kc DP b a Dpy Red-CCK f g e d Kc DP b a Dpy Red-CCVCCVCC 12345678161514131211109Res Pack4VCC Y1Y2Y3Y1Y2Y3X2X3X4X5X6X7X8X1X2X3X4X5X6X7X8X1X2X3X4X5X6X7X8X1X2X3X4X5X6X7X8X1图2-8显示部分的电路图本单元电路设计如图2-8所示,采用3位共阴极数码显示管,显示字符由单片机P2口送至锁存器74HC574锁存,再经显示驱动芯片ULN2O03驱动数码管显示,P0.1-P0.3分别控制每一位的动态显示。