利用bode图求传递函数例题
试求图示有源网络的传递函数和Bode图.docx
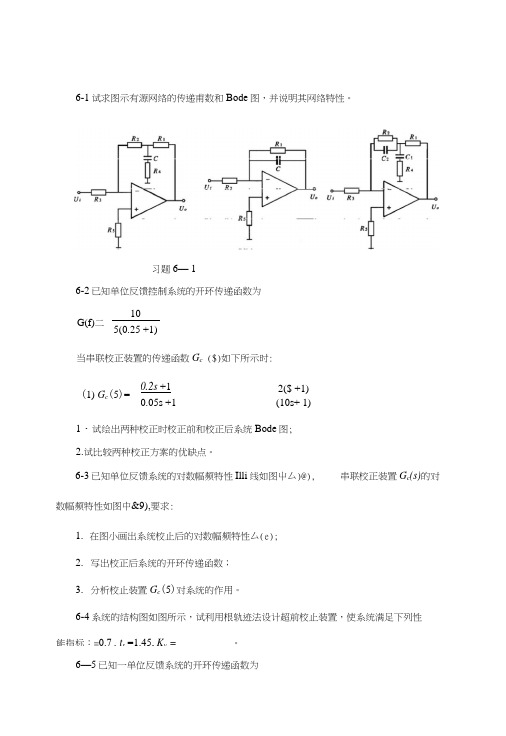
6-1试求图示有源网络的传递甫数和Bode 图,并说明其网络特性。
6-2已知单位反馈控制系统的开环传递函数为G(f)二 105(0.25 +1)当串联校正装置的传递函数G c ($)如下所示时:(1) G c (5)= 0.2s +10.05s +1 2($ +1) (10s+ 1)1・试绘出两种校正时校正前和校正后系统Bode 图;2.试比较两种校正方案的优缺点。
6-3已知单位反馈系统的对数幅频特性Illi 线如图屮厶)@),串联校正装置G c (s)的对数幅频特性如图中&9),要求: 1. 在图小画出系统校止后的对数幅频特性厶(e);2. 写出校正后系统的开环传递函数;3. 分析校止装置G c (5)对系统的作用。
6-4系统的结构图如图所示,试利用根轨迹法设计超前校止装置,使系统满足下列性 能指标:=0.7 , t s =1.45, K v = 。
6—5已知一单位反馈系统的开环传递函数为习题6— 1图试设计一•校正装置,使系统的相角裕量厂> 45° ,剪切频率0. > 50$ j 06-6单位反馈系统的开环传递函数为设计一串联滞后校正装置,使系统相角裕量/ > 40° ,并保持原有的开环增益。
6-7设单位反馈系统的开环传递函数为G(s)= --------------- ------------ 5(0.15 + 1)(0.255 + 1)试设计--校正装置,使系统满足下列性能指标,速度误差系数K,, 相角裕量 / > 40° ,剪切频率 > 0.5s~} o6-8单位反馈系统的开环传递函数为若耍求校正后系统的谐振峰值=1.4,谐振频率> lor 1,试确定校正装置的形 式与参数。
6-9单位反馈系统的结构如图所示,现用速度反馈来校正系统,校正后系统具有临界 G(s) =2005(0.15 + 1) G() =4 s(2s +1) G(s)=10 5(0.255 +1)(0.055 +1)习题6 —3图阻尼比< 试确定校正装置参数K,。
实验二北京科技大学自控实验(3)
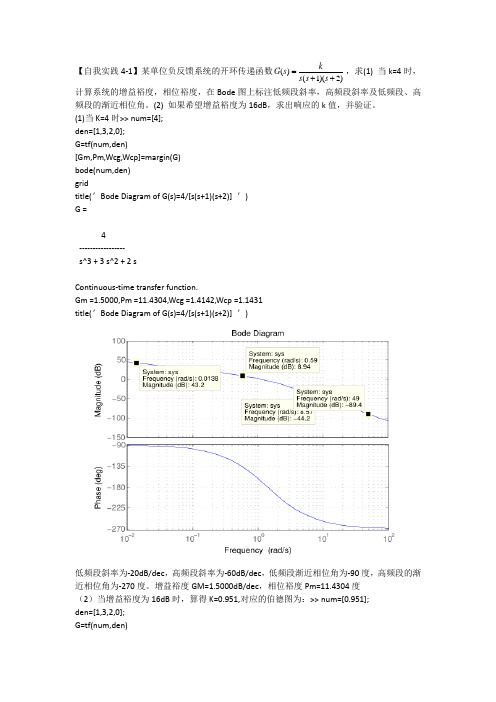
【自我实践4-1】某单位负反馈系统的开环传递函数()(1)(2)kG s s s s =++,求(1) 当k=4时,计算系统的增益裕度,相位裕度,在Bode 图上标注低频段斜率,高频段斜率及低频段、高频段的渐近相位角。
(2) 如果希望增益裕度为16dB ,求出响应的k 值,并验证。
(1)当K=4时>> num=[4]; den=[1,3,2,0]; G=tf(num,den)[Gm,Pm,Wcg,Wcp]=margin(G) bode(num,den) gridtitle(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′) G =4----------------- s^3 + 3 s^2 + 2 sContinuous -time transfer function.Gm =1.5000,Pm =11.4304,Wcg =1.4142,Wcp =1.1431 title(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′)低频段斜率为-20dB/dec ,高频段斜率为-60dB/dec ,低频段渐近相位角为-90度,高频段的渐近相位角为-270度。
增益裕度GM=1.5000dB/dec ,相位裕度Pm=11.4304度 (2)当增益裕度为16dB 时,算得K=0.951,对应的伯德图为:>> num=[0.951]; den=[1,3,2,0]; G=tf(num,den)[Gm,Pm,Wcg,Wcp]=margin(G) bode(num,den) gridtitle(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′) G = 0.951 ----------------- s^3 + 3 s^2 + 2 sContinuous -time transfer function.Gm =6.3091,Pm =54.7839,Wcg =1.4142,Wcp =0.4276 title(′Bode Diagram ′)【自我实践4-2】系统开环传递函数()(0.51)(0.11)kG s s s s =++,试分析系统的稳定性。
自动控制原理第6章习题解——邵世凡

习 题 66-1 设控制系统的开环传递函数为:()()()s s s s G 1.015.0110++= 绘出系统的Bode 图并求出相角裕量和幅值裕量。
若采用传递函数为(1+0.23s)/(1+0.023s)的串联校正装置,试求校正后系统的幅值和相角裕度,并讨论校正后系统的性能有何改进。
6—2设控制系统的开环频率特性为()()()()ωωωωωj j j j H j G 25.01625.011++= ①绘出系统的Bode 图,并确定系统的相角裕度和幅值裕度以及系统的稳定性; ②如引入传递函数()()()0125.025.005.0++=s s s G c 的相位滞后校正装置,试绘出校正后系统的Bode 图,并确定校正后系统的相角裕度和幅值裕度。
6 3设单位反馈系统的开环传递函数为()()()8210++=s s s s G 设计一校正装置,使静态速度误差系数K v =80,并使闭环主导极点位于s=-2±j23。
6-4设单位反馈系统的开环传递函数为()()()93++=s s s K s G ①如果要求系统在单位阶跃输入作用下的超凋量σ =20%,试确定K 值;②根据所确定的K 值,求出系统在单位阶跃输入下的调节时间t s 。
,以及静态速度误差系数; ③设计一串联校正装置,使系统K v ≥20,σ≤25%,t s 减少两倍以上。
6 5 已知单位反馈系统开环传递函数为()()()12.011.0++=s s s K s G 设计校正网络,使K v ≥30,γ≥40º,ωn ≥2.5,K g ≥8dB 。
6-6 由实验测得单位反馈二阶系统的单位阶跃响应如图6-38所示.要求①绘制系统的方框图,并标出参数值;②系统单位阶跃响应的超调量σ =20%,峰值时间t p =0.5s ,设计适当的校正环节并画出校正后系统的方框图。
6-7设原系统的开环传递函数为()()()15.012.010++=s s s s G 要求校正后系统的相角裕度γ=65º。
自动控制理论第五章习题汇总

自动控制理论第五章习题汇总填空题1、系统的频率响应与正弦输入信号之间的关系称为频率响应2、在正弦输入信号的作用下,系统输入的稳态分量称为频率响应简答题:5-2、什么是最小相位系统及非最小相位系统?最小相位系统的主要特点是什么?答在s平面上,开环零、极点均为负实部的系统称为最小相位系统;反之,开环零点或极点中具有正实部的系统称为非最小相位系统。
最小相位系统的主要特点是:相位滞后最小,并且幅频特性与相频特性有惟一的确定关系。
如果知道最小相位系统的幅频特性,可惟一地确定系统的开环传递函数。
5-3、什么是系统的频率响应?什么是幅频特性?什么是相频特性?什么是频率特性?答对于稳定的线性系统,当输入信号为正弦信号时,系统的稳态输出仍为同频率的正弦信号,只是幅值和相位发生了改变,如图5-3所示,称这种过程为系统的频率响应。
图5-3称为系统的幅频特性,它是频率的函数;称为系统的相频特性,它是频率的函数:称为系统的频率特性。
稳定系统的频率特性可通过实验的方法确定。
计算题5-1、设某控制系统的开环传递函数为)()(s H s G =)10016()12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值。
解:Bode 图如下所示剪切频率为s rad c /75.0=ω。
5-2、某系统的结构图和Nyquist 图如图(a)和(b)所示,图中2)1(1)(+=s s s G 23)1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。
解:由系统方框图求得内环传递函数为:ss s s s s s H s G s G +++++=+23452474)1()()(1)( 内环的特征方程:04742345=++++s s s s s由Routh 稳定判据:1:0310:16:44:171:01234s s s s s由此可知,本系统开环传函在S 平面的右半部无开环极点,即P=0。
应用Matlab绘制Bode图及Nyquist图
解答:
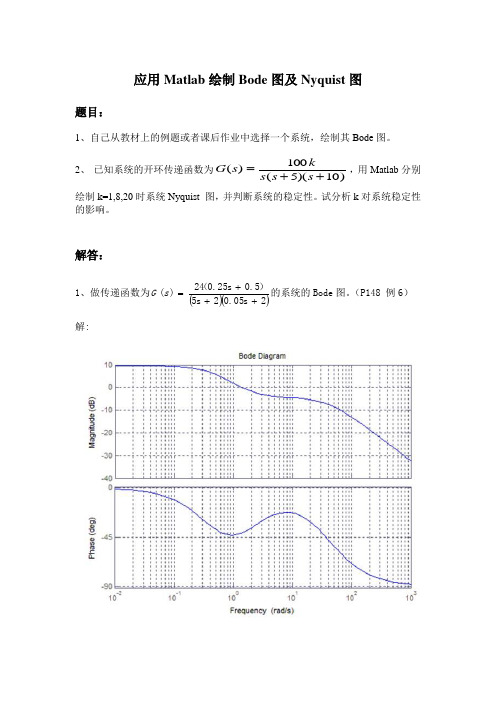
1、做传递函数为 G (s ) 解:
24 (0.25s 0.5) 的系统的 Bode 图。 (P148 例 6) 5s 20.05s 2
2、 已知系统的开环传递函数为 G ( s )
100k ,用 Matk=1,8,20 时系统 Nyquist 图,并判断系统的稳定性。试分析 k 对系统稳定 性的影响。 解: (1)当 K=1 时,由题意得 P=0,由 Bode 图得 N=0,则 Z=N+P=0,系统稳 定。
应用 Matlab 绘制 Bode 图及 Nyquist 图
题目:
1、自己从教材上的例题或者课后作业中选择一个系统,绘制其 Bode 图。 2、 已知系统的开环传递函数为 G ( s )
100k ,用 Matlab 分别 s ( s 5)(s 10)
绘制 k=1,8,20 时系统 Nyquist 图,并判断系统的稳定性。试分析 k 对系统稳定性 的影响。
(2) 当 K=8 时,由题意得 P=0,由 Bode 图得 N=2,则 Z=N+P=2,系统不稳 定。
(3)当 K=20 时,由题意得 P=0,由 Bode 图得 N=2,则 Z=N+P=2,系统 不稳定。
《自动控制原理》第5章习题答案
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
− p2
-10 -5
− p1
0
σ
②计算期望主导极点位置。
超调量σ% ≤ 20%,调整时间 ts ≤ 0.5s
4
ζω n
= 0.5s , ζω n = 8
σ%=e
−
ζπ
1−ζ 2
= 0.2 , ζ = 0.45 , θ = 63.2 0
故,期望主导极点位置, s1, 2 = −8 ± j15.8
期望极点
Gc ( s ) =
4,控制系统的结构如图 T5.3 所示,Gc(s)为校正装置传递函数,用根轨迹法设计校正装置,
使校正后的系统满足如下要求,速度误差系数 Kv ≥ 20,闭环主导极点 ω n = 4 ,阻尼系数 保持不变。
R(s)
+ -
Gc(s)
4 s ( s + 2)
Y(s)
图 T5.3
解:①校核原系统。
14
+20
0dB
1
Φ (ω ) 度
900 00
5
ω rad/s
ω rad/s
2,控制系统的结构如图 T5.1 所示,试选择控制器 Gc(s), 使系统对阶跃响应输入的超调量
完整版bode图习题解析
(?
?
?
2?? T arctan 1 ? ? 2T 2
?
1 )
T
(? ?
1) T
在低频段,? 很小,φ(ω)约等于0,高频段,? 很大, φ(ω) =-? ,转折频率处,
?
??n
?
1 ,
T
?
(?
n
)
?
?
?
2
Elemental Bode Diagrams
20
Mdb
0
-20
-40
-60 10-1
100
-20
-40
p
p
p
1
2
3
1
2
4 6 8 10 20 40 60 80 100
1倍频程 1倍频程
1倍频程 1倍频程
10倍频程
10倍频程
10倍频程
(a)
1
2
3
4
5
6
7
(b)
频率特性
G( j? ) ? K
二.典型环节的 Bode图
1. 放大环节 L(? )
20lgK
对数幅频特性
0
0.1
1
L(? ) ? 20lg A(? ) ? 20lg K ?(? )
10
20
1? s
0
1
1?1 2s
1
-20
s
-40
10 -2
10 -1
10 0
10 1
10 2
Example
Step 4: graphically add all element magnitude.
40
M db
10
20
波德(Bode)图
2 2
低频段( << n)
L( ) 20lg1 0
即低频渐近线为0dB的水平线。 高频段( >> n)
2 L( ) 20lg 1 2 n n 2 2
20 lg 40 lg 40 lg 40 lg n n n
3
通常用L()简记对数幅频特性,也称L() 为增益;用()简记对数相频特性。
对数坐标的优点
幅值相乘、相除,变为相加,相减,简化作图; 对数坐标拓宽了图形所能表示的频率范围 两个系统或环节的频率特性互为倒数时,其对数 幅频特性曲线关于零分贝线对称,相频特性曲线关 于零度线对称
11
20 10
Bode Diagram
= 0.1 = 0.2 = 0.3 = 0.5
L()/ (dB)
0
-10 -20
-30 -40 0
渐近线
= 0.7 = 1.0
-40dB/dec
() / (deg)
-45
-90 -135 -180 0.1
= 0.1 = 0.2 = 0.3
即低频段可近似为0dB的水平线,称为低频渐近线。 高频段( >> 1/T )
L( ) 20lg 1 T 2 2 20lg T 20lg T 20lg
即高频段可近似为斜率为-20dB/dec 的直线,称 为高频渐近线。
7
L()/ (dB)
10 0
10
Bode Diagram 渐近线 -20dB/dec
j 1 i 1 n m
(3)依次作出各环节的Bode图(渐进线); (4)将各环节曲线合成; (5)将对数幅频特性曲线竖直移动20lgKdB.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
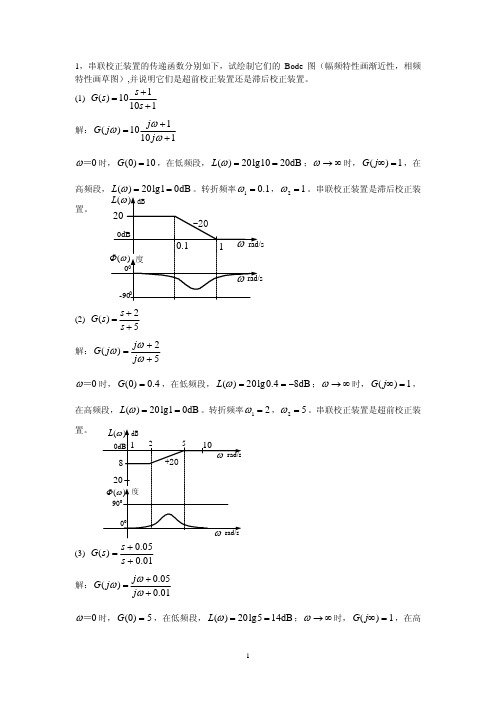
例题:已知最小相位系统开环对数频率特性曲线如图所示。
试写出开环传递函数)(s G k 。
解:
1) ω<ω1的低频段斜率为[-20],故低频段为K/s。
ω增至ω1,斜率由[-20]转为[-40],增加[-20],所以ω1应为惯性环节的转折频率,该环节为
1
1
11
+s ω 。
ω增至ω2,斜率由[–40]转为[–20],增加[+20],所以ω2应为一阶微分环节的转折频率,该环节为
11
2
+s ω 。
ω增到ω3,斜率由[-20]转为[-40],该环节为
1
1
13+s ω,ω>ω3,斜率保持不变。
故系统开环传递函数应由上述各典型环节串联组成,即
)
11
)(
11
(
)11
(
)(3
1
2
+++=
s s s s K s G k ωωω
2) 确定开环增益K
当ω=ωc 时,A(ωc )=1 。
所以 11
1
1
)1
(
)1
(
1
)1
(
)(1
2
23
21
22
=≈
+⋅+=
c
c
c
c c c c c K
K A ωωωωωωωωωωωωω
故 1
2ωωωc
K =
所以,)
11
)(
11
()11
()(3
1
2
12+++=s s s s s G c k ωωωωωω
练习:
最小相位系统的对数幅频特性如下图所示,试分别确定各系统的传递函数。
(a)
(b)
(c )
a :)
1(10
)(+=
s s s G
b :)
1)(110(100
)(++=
s s s G
c )
12.0)(15.0(100
)(++=s s s G。