从开环Bode图求系统开环传递函数参考例题
自动控制原理及应用各章习题清华董红生
习题1-1 什么是自动控制?什么是自动控制系统?1-2 试比较开环控制和闭环控制的优缺点。
1-3 自动控制系统有哪些基本组成元件?这些元件的功能是什么?1-4 简述反馈控制系统的基本原理。
1-5 简述对自动控制系统基本要求。
1-6 试举几个日常生活中的开环和闭环控制系统的实例,并说明它们的工作原理。
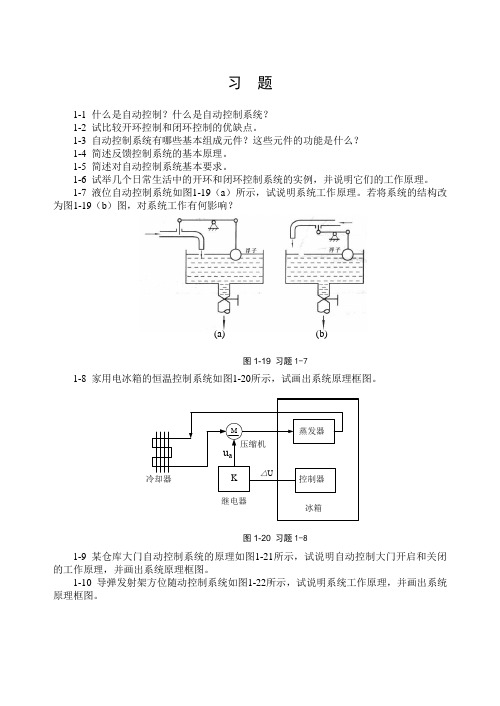
1-7 液位自动控制系统如图1-19(a)所示,试说明系统工作原理。
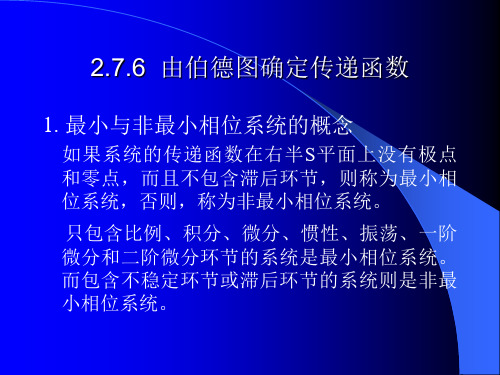
若将系统的结构改为图1-19(b)图,对系统工作有何影响?(a) (b)图1-19习题1-71-8 家用电冰箱的恒温控制系统如图1-20所示,试画出系统原理框图。
图1-20习题1-81-9 某仓库大门自动控制系统的原理如图1-21所示,试说明自动控制大门开启和关闭的工作原理,并画出系统原理框图。
1-10 导弹发射架方位随动控制系统如图1-22所示,试说明系统工作原理,并画出系统原理框图。
图1-20 习题1-8nU fU cU aU rθ图1-21 习题1-10习 题2-1 试建立如图2-39所示电路的微分方程。
1R )C(b )(a )图2-39 习题2-12-2求下列函数的拉普拉斯逆变换。
(1))3)(2(1)(+++=s s s s F(2))3()2(1)(3++=s s s s F (3))22(1)(2+++=s s s s s F2-3设系统传递函数为)2)(1(2)()(++=s s s R s C ,初始条件1)0(-=c ,0)0(=∙c ,试求单位阶跃信号作用时,系统输出响应)(t c 。
2-4若某系统在单位阶跃输入信号时,零初始条件下的输出响应t t e e t c --+-=21)(,试求系统的传递函数。
2-5使用复阻抗法写出如图2-40所示有源电路的传递函数。
)1C图2-40 习题2-52-6 已知系统方程组如下:⎪⎪⎩⎪⎪⎨⎧=-=-=--=)()()()()]()()([)()]()()()[()()()]()()[()()()(3435233612287111s X s G s C s G s G s C s X s X s X s G s X s G s X s C s G s G s G s R s G s X 试绘制系统结构图,并求闭环传递函数)()(s R s C 。
由伯德图确定传递函数
G(s)
K (1 1 s) 2 10
K (1 0.1s) 2
s(1 1 s) 2
s(1 5s) 2
0.2
穿越频率 1 ,因此,可以由L(1)=1, 或者 G( j ) 1 1 确定K。
通常在穿越频率附近,转折频率在穿越频 率左边的惯性环节的对数幅频特性可以认为是 -20db/dec 的斜线,即可以近似为一个积分环 节。而转折频率在穿越频率右边的惯性环节的 幅频特性可以认为是 0d的b 水平线,即可以近 似为1。
例2.29 某最小相位系统的对数幅频特性的渐近 线如图2.58所示,确定该系统的传递函数。
L( )
-20
-60 1
0 0.2
10
-20 图2.58 最小相位系统的伯德图
解 由于对数幅频特性的低频段是的直
线 20db / dec,所以,系统的传递函数有1个
积分环节。根据转折点处对数幅频特性渐近线 斜率的变化,容易写出系统的传递函数为
2. 由伯德图确定传递函数
对于最小相位系统,幅频特性和相频特性是单值 对应的,因此,根据系统的对数幅频特性就可以 写出系统的传递函数或者频率特性。 例2.28 某最小相位系统的对数幅频特性的渐近线 如图2.57所示,确定该系统的传递函数。
dB
40
L( )
-20
20
0 0.1 0.4
-40 -20
假设系统是最小相位的,则根据所选择的对数 幅频特性的渐近线,可以写出系统的传递函数。 例如,某系统的实验数据如表2.4所示,其伯 德图如图2.59所示。
表2.4 某系统的实验数据
0.1
0.2
0.4
1
2
4
10204099.6 49.3 23.7 7.96 3.26
自动控制原理课后习题答案,第5章(西南科技大学)
j
1(
j
5
1)
由频率特性可得:
解:
20
lg
0.4
1
L()
20 20
lg lg
0.41 5
20
lg
20
3
5
1 0.4 1
L() 3 2 10 4 3 20 5
可见:c 0.4
()
arctan
90
arctan 5
2
arc
tan 10
2
将 代c 入 ()
)( 1
1
s
1)
其中 1 10n 1
因 20lg K 20得K 10
因 20lg Mr 40 20
由Mr 2
1
12
得 0.05
10s2
G(s) (s2 0.1s 1)(0.1s 1)
5-8 已知单位反馈系统开环传递函数
G(s)H
(s)
s(s2
20(s 1) 2s 10)(s
1
2 10 时,直线斜率由
0dB/dec 变 为 -40dB/dec 、
10 5
40 60
当3 5 时,直线斜率由-
40dB/dec变为-20dB/dec 。
相频特性曲线由各环节的相频特性相加获得,计算几个点的 值绘出大致曲线。
num=[20 20]; den=[1 7 20 50 0]; bode(num,den) grid
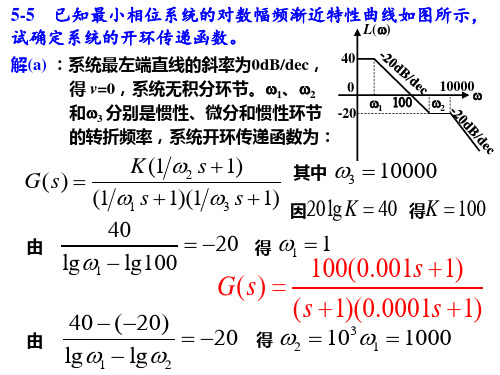
20 lg K
由
lg1 lg10
得K= 100
40
G(s)
100(0.316s 1) s2 (0.00316s 1)
解(c) :系统最左端直线的斜率为40dB/dec,得 v = -2,系统有两 个纯微分环节。1 和n 分别是振荡和惯性环节的转折频 率,则系统开环传递函数为:
实验二北京科技大学自控实验(3)
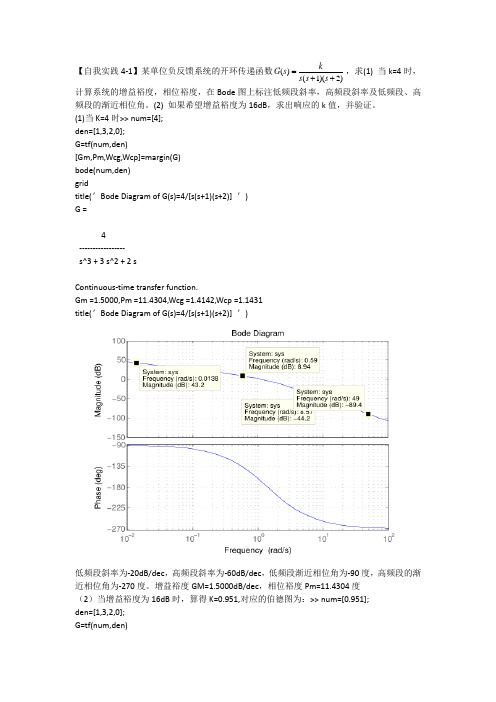
【自我实践4-1】某单位负反馈系统的开环传递函数()(1)(2)kG s s s s =++,求(1) 当k=4时,计算系统的增益裕度,相位裕度,在Bode 图上标注低频段斜率,高频段斜率及低频段、高频段的渐近相位角。
(2) 如果希望增益裕度为16dB ,求出响应的k 值,并验证。
(1)当K=4时>> num=[4]; den=[1,3,2,0]; G=tf(num,den)[Gm,Pm,Wcg,Wcp]=margin(G) bode(num,den) gridtitle(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′) G =4----------------- s^3 + 3 s^2 + 2 sContinuous -time transfer function.Gm =1.5000,Pm =11.4304,Wcg =1.4142,Wcp =1.1431 title(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′)低频段斜率为-20dB/dec ,高频段斜率为-60dB/dec ,低频段渐近相位角为-90度,高频段的渐近相位角为-270度。
增益裕度GM=1.5000dB/dec ,相位裕度Pm=11.4304度 (2)当增益裕度为16dB 时,算得K=0.951,对应的伯德图为:>> num=[0.951]; den=[1,3,2,0]; G=tf(num,den)[Gm,Pm,Wcg,Wcp]=margin(G) bode(num,den) gridtitle(′Bode Diagram of G(s)=4/[s(s+1)(s+2)] ′) G = 0.951 ----------------- s^3 + 3 s^2 + 2 sContinuous -time transfer function.Gm =6.3091,Pm =54.7839,Wcg =1.4142,Wcp =0.4276 title(′Bode Diagram ′)【自我实践4-2】系统开环传递函数()(0.51)(0.11)kG s s s s =++,试分析系统的稳定性。
自动控制原理期末考试卷含答案
自动控制原理期末考试卷与答案一、填空题〔每空 1 分,共20分〕1、对自动控制系统的根本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。
6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++,那么其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反应控制又称偏差控制,其控制作用是通过 给定值 与反应量的差值进行的。
10、假设某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,那么该系统的传递函数G(s)为1050.20.5s s s s+++。
11、自动控制系统有两种根本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最根本的要求,假设一个控制系统的响应曲线为衰减振荡,那么该系统 稳定。
第五章(5) 频域:用实验法确定系统的传递函数

第五节 用实验法确定系统传递函数
例
已知采用积分控制液位系统的结构 和对数频率特性曲线,试求系统的传 和对数频率特性曲线 试求系统的传 hr(t) 递函数。 递函数。 1 K h(t)
1 4
L(ω)/dB
20 0 -20 -20dB/dec
S
Ts+1
φ(ω)
0 -90 -180
返回 解: 将测得的对数 -40dB/dec 1 = 曲线近似成渐 0.25S2+1.25S+1) 近线: 近线 ω 1 φ(s)= (S+1) (S/4+1)
第五章 频率特性法
第五节 用实验法确定系统传递函数
频率特性具有明确的物理意义, 频率特性具有明确的物理意义,可 用实验的方法来确定它.这对于难以列 用实验的方法来确定它 这对于难以列 写其微分方程的元件或系统来说,具有 写其微分方程的元件或系统来说 具有 很重要的实际意义。 很重要的实际意义。
一、用实验法确定系统的伯德图 二、根据伯德图确定传递函数
1. ι= 0
系统的伯德图: 系统的伯德图:
x
L(ω)/dB
-20dB/dec
低频渐近线为
0
20lgK-40dB/源自ecL(ω)=20lgK=χ 即
χ
ωc
ω
K=10 20
第五节 用实验法确定系统传递函数
2. ι= 1
系统的伯德图: 系统的伯德图: ω=1 L(ω)=20lgK
L(ω)/dB 20lgK
0
-20dB/dec
ω0
1 ω1 ωc
-40dB/dec
ω
低频段的曲线与横 轴相交点的频率为 的频率为ω 轴相交点的频率为 0 20lgK 因为 =20 lgω0-lg1
自动控制原理期末考试卷与答案
自动控制原理期末考试卷与答案一、填空题(每空 1 分,共20分)1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。
2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。
3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。
4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。
5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω. 6、奈奎斯特稳定判据中,Z = P — R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。
7、在二阶系统的单位阶跃响应图中,定义为 调整时间 。
%σ是超调量 。
8、设系统的开环传递函数为12(1)(1)Ks T s T s ++,则其开环幅频特性为2212()()1()1KA T T ωωωω=+⋅+,相频特性为01112()90()()tg T tg T ϕωωω--=---。
9、反馈控制又称偏差控制,其控制作用是通过给定值 与反馈量的差值进行的。
10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s )为1050.20.5s s s s+++。
11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。
12、根轨迹起始于开环极点,终止于开环零点。
13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。
自动控制理论第五章习题汇总
自动控制理论第五章习题汇总填空题1、系统的频率响应与正弦输入信号之间的关系称为频率响应2、在正弦输入信号的作用下,系统输入的稳态分量称为频率响应简答题:5-2、什么是最小相位系统及非最小相位系统?最小相位系统的主要特点是什么?答在s平面上,开环零、极点均为负实部的系统称为最小相位系统;反之,开环零点或极点中具有正实部的系统称为非最小相位系统。
最小相位系统的主要特点是:相位滞后最小,并且幅频特性与相频特性有惟一的确定关系。
如果知道最小相位系统的幅频特性,可惟一地确定系统的开环传递函数。
5-3、什么是系统的频率响应?什么是幅频特性?什么是相频特性?什么是频率特性?答对于稳定的线性系统,当输入信号为正弦信号时,系统的稳态输出仍为同频率的正弦信号,只是幅值和相位发生了改变,如图5-3所示,称这种过程为系统的频率响应。
图5-3称为系统的幅频特性,它是频率的函数;称为系统的相频特性,它是频率的函数:称为系统的频率特性。
稳定系统的频率特性可通过实验的方法确定。
计算题5-1、设某控制系统的开环传递函数为)()(s H s G =)10016()12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值。
解:Bode 图如下所示剪切频率为s rad c /75.0=ω。
5-2、某系统的结构图和Nyquist 图如图(a)和(b)所示,图中2)1(1)(+=s s s G 23)1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。
解:由系统方框图求得内环传递函数为:ss s s s s s H s G s G +++++=+23452474)1()()(1)( 内环的特征方程:04742345=++++s s s s s由Routh 稳定判据:1:0310:16:44:171:01234s s s s s由此可知,本系统开环传函在S 平面的右半部无开环极点,即P=0。
自动控制原理题目(含答案)
《自动控制原理》复习参考资料一、基本知识11、反馈控制又称偏差控制,其控制作用是通过输入量和反馈量的差值进行的。
2、闭环控制系统又称为反馈控制系统。
3、在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。
4、自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统和程序控制系统。
5、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。
6、控制系统的数学模型,取决于系统结构和参数, 和外作用及初始条件无关。
7、两个传递函数分别为G1(s)和G2(s)的环节,以并联方式连接,其等效传递函数为G1(s)+G2(s),以串联方式连接,其等效传递函数为G1(s)*G2(s)。
8、系统前向通道传递函数为G(s),其正反馈的传递函数为H(s),则其闭环传递函数为G(s)/(1- G(s)H(s))。
9、单位负反馈系统的前向通道传递函数为G(s),则闭环传递函数为G(s)/(1+ G(s))。
10、典型二阶系统中,ξ=0.707时,称该系统处于二阶工程最佳状态,此时超调量为4.3%。
11、使用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为正数,则系统稳定。
12、线性系统稳定的充要条件是所有闭环特征方程的根的实部均为负,即都分布在S平面的左平面。
13、随动系统的稳态误差主要来源于给定信号,恒值系统的稳态误差主要来源于扰动信号。
14、对于有稳态误差的系统,在前向通道中串联比例积分环节,系统误差将变为零。
15、系统稳态误差分为给定稳态误差和扰动稳态误差两种。
16、对于一个有稳态误差的系统,增大系统增益则稳态误差将减小。
17、对于典型二阶系统,惯性时间常数T 愈大则系统的快速性愈差。
18、使用频域分析法,穿越频率越大,则对应时域指标t s 越小,即快速性越好19最小相位系统是指S 右半平面不存在系统的开环极点及开环零点。
20、按照校正装置在系统中的不同位置,系统校正可分为串联校正、反馈校正、 补偿校正和复合校正四种。
自动控制原理:第六章频域分析法——伯特图及稳定性分析
• 当阻尼系数接近1时,振荡环节具有低通滤波的作用; • 而随着减小,=n=1/T处的幅值迅速增大,表明其对输
入信号中该频率附近分量的放大作用逐渐加强,此时,振
荡环节具有选频作用。
6.4 系统开环频率特性-典型环节的伯德图
40
Bode Diagram
二阶微分环节:
30
20
转折频率 渐近线
L() /(dB)
10 /T
1) 将乘除运算转化为加减运算,因而可通过简单的图像叠加 快速绘制高阶系统的伯德图 ;如 G( j) A1()e j1() A2 ()e , j2 () 则20lgA1()A2()=20lgA1()+20lgA2()
2) 伯德图还可通过实验方法绘制,经分段直线近似整理后, 很容易得到实验对象的频率特性表达式或传递函数.
i 1
i m1 1
v n1
v n1 nv n1 2
( jTl 1)
(1 Tl2 2 2 j lTl )
l v 1
l v n1 1
(6 - 17)
其 中 ,K ,0 i 1,0 l 1, i 0,Tl 0都 为 常 数 。
除此外,也存在某个Tl<0,开环不稳定,但闭环可能仍然 稳定的情况。
1
A(ω)
1 ωT 2 2 2ζωT 2
L() /(dB)
10
0
-10 -20
(1 T 22
j2T)1
0.05 0.1 0.3
-30
0.7
1 -40
180
转折频率 渐近线
135
(ω)
arctan
1
2ζωT
ωT
2
90 45
0
() /()