已知单位反馈系统的开环传递函数
自动控制单选题参考答案

D.任意 T1 和 2
相位超前校正装置的奈氏曲线为( )
B
A.圆
B.上半圆
C.下半圆
D.45°弧线
在系统中串联 PD 调节器,以下那一种说法是错误的( )
D
A.是一种相位超前校正装置
B.能影响系统开环幅频特性的高频段
C.使系统的稳定性能得到改善 D.使系统的稳态精度得到改善
根轨迹渐近线与实轴的交点公式为( )
B
s2
A.7
B.2
C. 7
D. 1
2
2
若系统的传递函数在右半 S 平面上没有零点和极点,则该系统称作( )
B
A.非最小相位系统 B.最小相位系统 C.不稳定系统 D.振荡系统
一般为使系统有较好的稳定性,希望相位裕量 为( )
C
A.0~15
B.15~30
C.30~60
D.60~90
某系统的闭环传递函数为: GB s
B.(1,j0)
C.(1,j1)
D.(10,j0)
直接对控制对象进行操作的元件称为( )
D
A.给定元件
B.放大元件 C.比较元件
D.执行元件
某典型环节的传递函数是 Gs 1 ,则该环节是( )
C
Ts
A.比例环节
B.惯性环节 C.积分环节
D.微分环节
已知系统的单位脉冲响应函数是 yt 0.1t 2 ,则系统的传递函数是( )
A
A. 0.2 s3
B. 0.1 s
C. 0.1 s2
D. 0.2 s2
与开环控制系统相比较,闭环控制系统通常对( )进行直接或间接地测量,通过反馈环节去影响控 B
制信号。
A.输出量
自动控制原理课后习题答案,第5章(西南科技大学)
j
1(
j
5
1)
由频率特性可得:
解:
20
lg
0.4
1
L()
20 20
lg lg
0.41 5
20
lg
20
3
5
1 0.4 1
L() 3 2 10 4 3 20 5
可见:c 0.4
()
arctan
90
arctan 5
2
arc
tan 10
2
将 代c 入 ()
)( 1
1
s
1)
其中 1 10n 1
因 20lg K 20得K 10
因 20lg Mr 40 20
由Mr 2
1
12
得 0.05
10s2
G(s) (s2 0.1s 1)(0.1s 1)
5-8 已知单位反馈系统开环传递函数
G(s)H
(s)
s(s2
20(s 1) 2s 10)(s
1
2 10 时,直线斜率由
0dB/dec 变 为 -40dB/dec 、
10 5
40 60
当3 5 时,直线斜率由-
40dB/dec变为-20dB/dec 。
相频特性曲线由各环节的相频特性相加获得,计算几个点的 值绘出大致曲线。
num=[20 20]; den=[1 7 20 50 0]; bode(num,den) grid
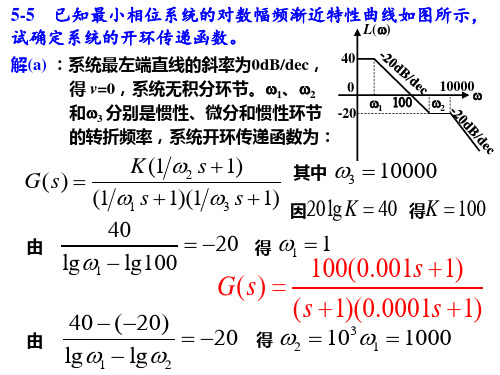
20 lg K
由
lg1 lg10
得K= 100
40
G(s)
100(0.316s 1) s2 (0.00316s 1)
解(c) :系统最左端直线的斜率为40dB/dec,得 v = -2,系统有两 个纯微分环节。1 和n 分别是振荡和惯性环节的转折频 率,则系统开环传递函数为:
自动控制原理第四章习题解答
4
胡寿松自动控制原理习题解答第四章
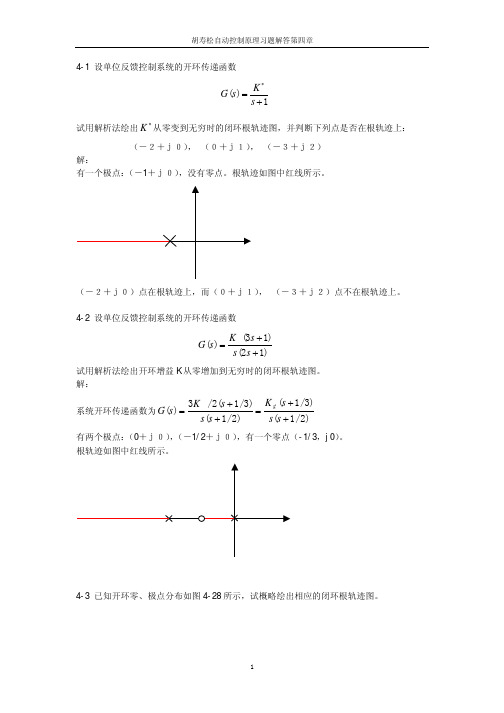
(2) G(s) =
K ∗ (s + 20)
。
s(s + 10 + j10)(s + 10 − j10)
解:
系统开环传递函数为 G(s) =
K ∗ (s + 20)
s(s + 10 + j10)(s + 10 − j10)
有三个极点:p1 =(0,j0),p2 =(-10+j10),p3 =(-10-j10),有一个零点 z1 =(-
(2) 确定 G(s) = K ∗ (s + z)
产生纯虚根为±j1 的z值和 K ∗ 值。
s 2 (s + 10)(s + 20)
解:系统特征方程为 s4 + 30s3 + 200s2 + K *s + K *z = 0 令 s = j1代入特征方程中得:
20,j0)。 起始角:
∑ ∑ θ pi
= (2k
+ 1)π
+
m
ϕ z j pi
j =1
n
−
θ pi pi
j =1
( j≠i)
k = 0,±1,±2,L
θ p1 = 1800
θ p2 = 1800 ϕ + z1p2 θ − p1p2 θ − p3p2 = 1800 + 450 − 1350 − 900 = 00
有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:
1+ 1 = 1 d d + 0.5 d + 1
d 2 + 2d + 0.5 = 0 解方程的 d1 = −1.7 , d2 = −0.29
(完整版)自动控制原理课后习题及答案
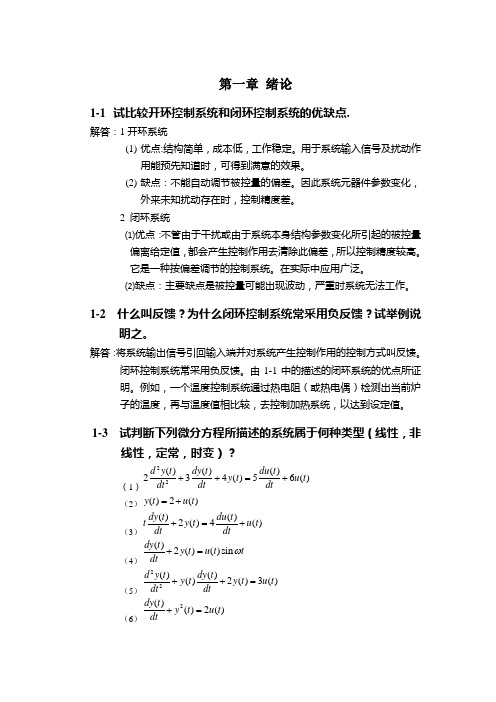
第一章 绪论1-1 试比较开环控制系统和闭环控制系统的优缺点.解答:1开环系统(1) 优点:结构简单,成本低,工作稳定。
用于系统输入信号及扰动作用能预先知道时,可得到满意的效果。
(2) 缺点:不能自动调节被控量的偏差。
因此系统元器件参数变化,外来未知扰动存在时,控制精度差。
2 闭环系统⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。
它是一种按偏差调节的控制系统。
在实际中应用广泛。
⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。
1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。
解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。
闭环控制系统常采用负反馈。
由1-1中的描述的闭环系统的优点所证明。
例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉子的温度,再与温度值相比较,去控制加热系统,以达到设定值。
1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)?(1)22()()()234()56()d y t dy t du t y t u t dt dt dt ++=+(2)()2()y t u t =+(3)()()2()4()dy t du t ty t u t dt dt +=+ (4)()2()()sin dy t y t u t tdt ω+=(5)22()()()2()3()d y t dy t y t y t u t dt dt ++= (6)2()()2()dy t y t u t dt +=(7)()()2()35()du t y t u t u t dt dt =++⎰解答: (1)线性定常 (2)非线性定常 (3)线性时变 (4)线性时变 (5)非线性定常 (6)非线性定常 (7)线性定常1-4 如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。
自动控制原理第三章课后习题 答案()

3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C `闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK !用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T sTs Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 203-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。
自动控制理论_哈尔滨工业大学中国大学mooc课后章节答案期末考试题库2023年

自动控制理论_哈尔滨工业大学中国大学mooc课后章节答案期末考试题库2023年1.对于惯性环节【图片】,下列说法错误的是()。
参考答案:其微分方程为。
2.负反馈系统的开环极点为-1、-4(两重极点),开环零点为-2;若该系统具有一对实部为-3.75的共轭复极点,那么该系统的另外一个极点为()。
参考答案:-1.53.某单位负反馈控制系统的开环传递函数为【图片】,若使该系统在单位斜坡信号作用下的稳态误差小于0.2 ,那么K的范围应为()。
参考答案:44.传递函数为【图片】,在阶跃输入下,输出响应的形式为()。
参考答案:单调上升5.系统的开环传递函数是指()。
参考答案:所指定的闭环回路主反馈点断开后,反馈信号和偏差信号之比6.设单位反馈系统的开环传递函数为【图片】,当K由0增大时,闭环系统()。
参考答案:由不稳定到稳定7.控制系统的稳态响应是指【图片】时()。
参考答案:系统对某一输入信号的固定响应8.系统的开环传递函数为【图片】,当增大K时,闭环系统阶跃响应的超调量(),调整时间()。
(调整时间近似取【图片】)参考答案:增加;不变9.已知单位反馈系统的开环传递函数为【图片】,其闭环系统稳定的条件是()。
参考答案:K>1510.控制系统如图所示,若使系统在斜坡输入下的稳态误差为零,【图片】应取为()。
(定义误差e(t)=r(t)-c(t))【图片】参考答案:1/K11.已知单位反馈系统的开环传递函数为【图片】,当输入信号为【图片】时,闭环系统输出的稳态误差为()。
参考答案:0.212.求取控制系统的时域响应的方法有()。
参考答案:求取系统的输出,并求其拉氏反变换_求得其微分方程的通解和特解之和_求得暂态分量和稳态分量之和_求得零输入响应和零状态响应之和13.减小或消除系统稳态误差的方法主要有()。
参考答案:增大系统的开环增益_引入适当的前馈环节_在前向通道中串联积分环节14.如果一个线性系统是稳定,那么()。
控制工程基础试卷及答案
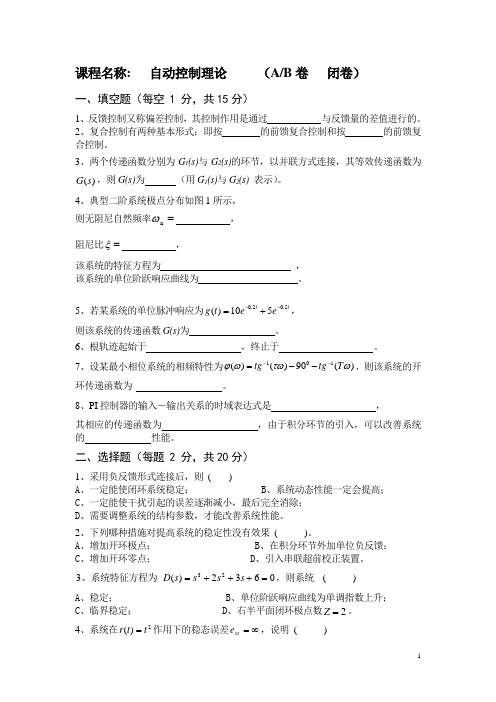
课程名称: 自动控制理论 (A/B 卷 闭卷)一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
自动控制原理_王万良(课后答案4
⎡0 1 0 ⎤ ⎢ ⎥ x ( k + 1) = ⎢ 0 0 1 ⎥ x ( k ) ⎢0 k 0 ⎥ ⎣ 2 ⎦
试求使系统渐进稳定的 K 值范围。 *答案: 0 < K < 2 时系统渐进稳定。
K>0
4.13 非线性系统线性部分的极坐标图,非线性部分的负倒幅特性如图题 4.13 所示。试判断系统是否稳 定,是否存在自激振荡。 图题 4.13 I
4.7 已知闭环离散系统的特征方程为 D(z) = z + 0.2z + z + 0.36z + 0.8 = 0 试判断系统的稳定性。 答案:临界稳定 4.8 如图题 4.8 所示离散系统,采样周期 T=1s,Gh(s)为零阶保持器,而
4 3 2
G (s) =
Κ s ( 0 . 2 s + 1)
要求: (1)K=5 时,分析系统的稳定性; (2)确定使系统稳定的 K 值范围。
第 4 章习题 4.1 已知系统特征方程如下,试用劳斯判据判别系统稳定性,并指出位于右半 S 平面和虚轴上的特征根的 数目。 (1) D( s) = s + s + 4 s + 4 s + 2 s + 1 = 0
5 4 3 2
(2) D( s) = s + 3s + 5s + 9 s + 8s + 6s + 4 = 0
闭环特征方程为:
s ( s − 1) + 10(1 + k n s ) = 0
即 s + (10k n s − 1) s + 10 = 0
2
s2 1 10 1 s 10k n − 1 s0 10 10 k n − 1 > 0, k n > 0.1 稳定 当 k n = 0.1 时,临界稳定 非最小相位系统,当速度及增量 k n 越大,越稳定
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3
2
S 0.2 S S 1
试采用 MATLAB绘制系统 Bode 图并求幅值裕量和相角裕量。 5-17 用 MATLAB绘制系统传递函数为
G ( s)
25
2
s s 25
的 Bode 图,并求取谐振频率和谐振峰值。
5-18 如图所示系统
习题 5-12 图
+
10
s 10
-
2 ( s 1)( s 2 )
习题 5-12 图
5-2 设单位反馈系统的开环传递函数
10 G ( s)
(s 2)
试求下列输入信号作用下,系统的稳态输出。
1. r ( t ) sin( t 30 )
2. r ( t ) sin t 2 cos( 2t 45 )
5-3 已知单位反馈系统的开环传递函数
10 G ( s)
s( s 1)( s 10 )
试绘制系统的极坐标图 Bode 图,并求系统的相角裕量和幅值裕量。
K G(s)
s( s 1)( 0 .1 s 1)
1. 确定使系统的谐振峰值为 M r =1.4 的 K 值; 2. 确定使系统的幅值裕量为 20dB 的 K 值; 3. 确定使系统的相角裕量为 60°的 K 值。 5-14 设有一系统其开环传递函数为
K ( S 3) G( S) H ( S)
S( S 1)
( 其中 υ 表示
5-2
习题 5-7 图
5-8 图示系统的极坐标图,开环增益 K=500,且开环无右极点 ,,试确定使闭环系统稳
习题 5-8 图
定的 K 值范围。 5-9 设系统的开环传递函数为
G ( s) H ( s)
s
Ke s(s 1)
1. 试确定使系统稳定时 K 的临界值与纯时延 τ 的关系; 2. 若 τ =0.2 ,试确定使系统稳定的 K 的最大值。
5-10 已知单位反馈系统的开环传递函数
K G ( s)
s(s 1)( s 10 )
求: 1. 当 K=10
2. 要求系统相角裕量为 30 , K 值应为多少?
3. 要求增益裕量为 20dB,求 K 值应为多少?
习题 5-11 图 5-3
5-11 系统结构图如图所示,试用 Nyquist 判据确定系统稳定时 τ 的范围。 5-12 已知闭环系统的幅频、相频特性如图所示。 1. 试求系统的传递函数; 2. 并计算系统动态性能指标 M p、 ts。 5-13 设单位反馈系统的开环传递函数为
(1 0 .2 s)(1 0 .02 s)
( 2) G ( s) H ( s)
0.1 s
Ke s( s 1)( 0 .1s 1)
试绘制系统的 Bode 图,并确定使开环截止频率 ω c=5rad/s 时的 K 值。 5-7 设系统开环频率特性极坐标图如图所示,试判断闭环系统的稳定性。
积分环节个数, P 为开环右极点个数 )。
G (s)
K ( s 1)
s( s 2)( s 3)( s 4 )
1. 当 K= 5 时,试用 MATLAB绘制系统的 Bode 图; 2. 分析系统的稳定性; 3. 求取临界稳定的 K 值。
5-5
已知单位反馈系统的开环传递函数
习题
5-1 已知单位反馈系统的开环传递函数,试绘制其开环极坐标图和开环对数频率特性。
10 (1) G ( s)
s( 0.1s 1)
(2) G ( s)
1
(0 .2 s 1)( 2 s 1)
(3) G ( s)
1
s( s 1)( 2 s 1)
10
(4) G ( s)
2
s ( s 1)( 0 .1 s 1)
5-4
1. 试用 MATLAB绘制系统的 Nyquist 图和 Bode 图;
2. 求取系统的开9 已知单位负反馈系统的开环传递函数为
G (s)
K
3
2
s 4 s 10 s 24
试用 MATLAB 求取使系统相角裕量等于 30o 的 K 值。
5-20 对于某一非最小相位系统
习题 5-4 图
5-4 已知图示 RLC 网络,当 ω =10rad/s 时,系统的幅值 A=1 相角 =-90 °,试求其传
递函数。
5-5 已知最小相位系统的开环对数幅频特性的渐近线如图所示,
试求系统的开环传递函
数,并计算系统的相角裕量。
5-1
5-6 设系统开环传递函数为
习题 5-5 图
K ( 1) G ( s) H ( s)
试用 MATLAB研究闭环系统稳定 K 的取值范围 5-15 已知系统开环传递函数
1 G (S)
S ( S 1)
(1)试采用 MATLAB自动坐标选取在绘 Nyquist 图。 (2)实轴( -2 , 2)虚轴( -5 ,5)再来绘奈氏图。 5-16 已知单位反馈系统,其开环传递函数
G ( S)
2
S 2S 1