三位四通电液比例阀控缸动力机构的数学建模
基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真
N L = pLQL = (p1 - p2 ) (Q1 + Q 2 ) /2
( 2)
设液压缸的输出功率 N c 为
N c= FLv
( 3)
式中: FL 为液压缸负载, F L = A 1p1 - A2 p2;
v为液压缸活塞的运动速度, v = Q1 /A1 = Q2 /A2。 令 N = N c - N L, 由式 ( 1)、 ( 2 )、 ( 3) 可得
所以, 可以将比例放大器和比例方向阀结合起来 看成一个比例环节, 传递函数为
X v = K aU 1 2 阀控非对称液压缸的数学模型
阀控动力机构是
电液 比 例 位置 控 制 系 统的 关 键 元 件, 其 特 性对 系 统 的性 能 有 很 大的 影 响, 因 此 必 须 对其 建 立 线性 化 的 数 学模 型。 阀 控 动 力 机 构示意图如图 2所示。 下面 将 以 活塞 正 向 运 图 2 阀控非对称缸机构示意图
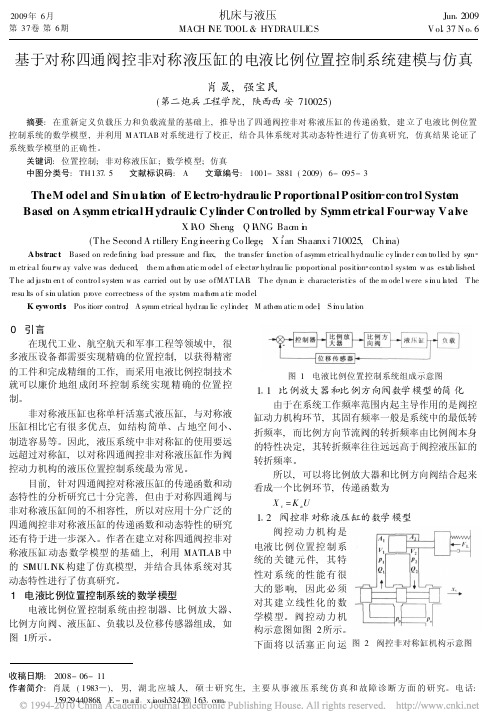
1 电液比例位置控制系统的数学模型 电液比例位置 控制系 统由控 制器、比 例放 大器、
比例方向阀、液压缸、负载以及位移传感器组成, 如 图 1所示。
图 1 电液比例位置控制系统组成示意图
1 1 比例放大器和比例方向阀数学模型的简化 由于在系统工作频率范围内起主导作用的是阀控
缸动力机构环节, 其固有频率一般是系统中的最低转 折频率, 而比例方向节流阀的转折频率由比例阀本身 的特性决定, 其转折频率往往远远高于阀控液压缸的 转折频率。
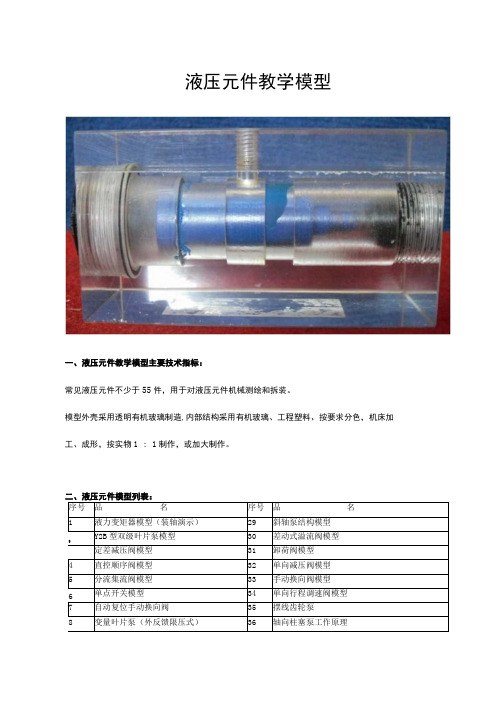
液压元件教学模型
中板
33
YCY14-B的压力补偿变量机构
680
中板
35
单叶片式摆动油马达结构
920
中板
37
1型单向减压阀
640
中板
39
Q型调速阀
660
中板
41
LY型溢流节阀结构
660
中板
43
位置反馈伺服阀结构
620
中板
2
容积泵工作原理
630
中板
1
外反馈限压式叶片泵工作原理
760
中板
6
先导式溢流阀
640
中板
8
X-25顺序阀
多点压力表开关
1120
36
比例方向阀
2100
37
液压千斤顶的工作原理
980
38
CB型齿轮泵
1260
39
定量叶片泵(双作用式)
2120
40
径向柱塞泵工作原理
990
41
单杆活塞活缸
920
42
单叶片摆油缸
920
43
单向阀
920
11
机动换向阀
HlO
45
三位四通电磁换向阀
1400
46
先导式顺序阀
1420
47
减压调速阀
660
中板
38
动力头滑台液压系统之一
1280
中板
39
机动一液动时间控制操纵箱
1150
中板
40
M1432Λ型万能外圆磨床液压系统原理图
3200
特大板
11
变量泵系统
660
中板
42
单泵系统
阀控液压缸动力机构通用传递函数建模与分析
液压气动与密封/2018 年第 02 期 doi:10.3969/j.issn.1008-0813.2018.02.006
阀控液压缸动力机构通用传递函数建模与分析
郭洪波,水涌涛,李 磊,及红娟
(北京航天长征飞行器研究所,北京 100076)
摘 要:根据力平衡和输出功率的关系定义了阀控液压缸的负载压力和负载流量,针对非匹配的阀控液压缸动力机构存在的压力突跳
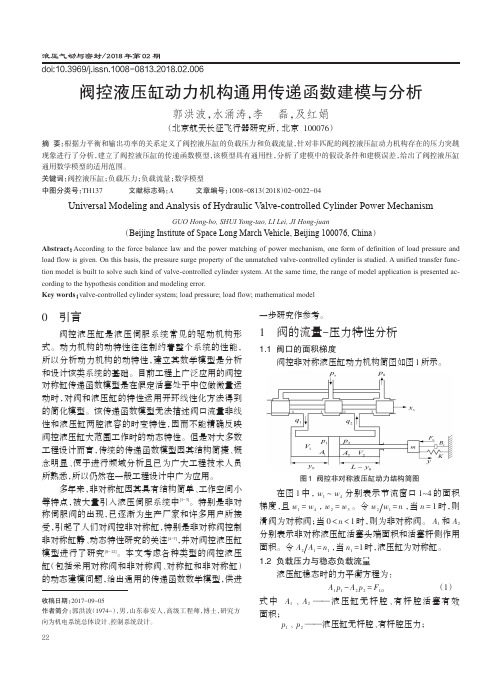
面积。令 A2 A1 = n1 ,当 n1 =1 时,液压缸为对称缸。 1.2 负载压力与稳态负载流量
液压缸稳态时的力平衡方程为:
A1 p1 - A2 p2 = FL0
(1)
式 中 A1 、A2 —— 液 压 缸 无 杆 腔 、有 杆 腔 活 塞 有 效
面积;
p1 、p2 ——液压缸无杆腔、有杆腔压力;
示为:
( ) qsv1 = Cd Asv1 2 ps - p1 ρ
(3a)
( ) qsv2 = Cd Asv2 2 ps - p2 ρ
(3b)
( ) qsv3 = Cd Asv3 2 p2 - p0 ρ
(3c)
( ) qsv4 = Cd Asv4 2 p1 - p0 ρ
(3d)
式中 xv ——伺服阀阀芯位移量; p1 、p2 ——液压缸两腔的压力; Cd ——滑阀的流量系数; Asvi ——伺服阀第 i 个阀口的过流面积;i=1,…4。
阀控缸建模方法的数字仿真比较

]:电极,则电极尺寸比所需要的尺寸小,通过电火花
放电加工后的模具尺寸相应偏小,丽产品尺寸也偏
小;只有通过方法三(“画出工件缩小余量值之后的
3D图形,再使用平底刀以。的余量直接加工”),加
工后的电极尺寸最为准确,通过电火花放电加工后的
模具尺寸也最为准确,相应的产品尺寸才准确,因此 推荐在实际的加工过程中,尽量使用这种方法。
E:兰集竽
砭——流量增益、m2/s:
(7)
C;(PI—p:)一C。p。】 式中:G。——流量系数,无因次;
(2d)
”——阀口面积梯度,“;
托——阀口开度,“;
P——液体密度,kg/m3;
卢,——系统的等效容积弹性系数,Pa;
见——供液压力,Pa;
p。——液压缸左腔压力,Pa;
p:——液压缸右腔压力,Pa;
编程时给刀具端部侧边增加一个R值,图6所 示,月的值为工件余量的绝对值,然后再指定工件负 的余最值,而实际使用没有端部侧边R角的相同直 径刀具进行加I:。
局部放大图
局部放大图
图8
图9
则加亡情况如图7及图8局部放大图所示,加工过程
中,刀具端部R与工件R面相切,只要工件的负余
量的绝对值不火于刀具的只值,则加工的结果就是
我们所需要的结果。然而,我们实际使用的刀具并不
存在端部的R,所以加工的实际情况不是上图8所示
的理想情况,而是如『翻9所示.川具底部的尖角切入
丁工件内,加工的帮体结果如图l()所示.外侧轮廓 线表示理想的工件外形,内N”E域
轮廓线表示实际加工出的工
件外形。,显而易见,实际加
工出的工件外形小于理想的
l:件外形,刀具切人工件内
应频率与振幅的关系曲
三通阀控单作用缸电液伺服系统的建模与仿真
YAN Xi a o s ha n . L I U Yu r o n g
( 1 . S c h o o l o f Me c h a n i c a l E n g i n e e i r n g ,N o r t h e a s t D i a n l i U n i v e r s i t y ,J i l i n J i l i n 1 3 2 0 1 2 ,C h i n a ;
Mo d e l i n g a n d S i mu l a io t n f o r El e c t r o - h y d r a li u c S e r v o S y s t e m wi t h S i n g l e - a c in t g
第3章 液压动力元件

《液压伺服与比例控制系统》
多媒体授课系统
燕 山 大 学 《液压伺服与比例控制系统》课程组
第3章 液压动力元件
本章摘要
液压动力元件(或称液压动力机构)是由液压放 大元件(液压控制元件)和液压执行元件组成。有四 种基本型式的液压动力元件:阀控液压缸、阀控 液压马达、泵控液压缸、泵控液压马达。 本章将建立几种基本的液压动力元件的传递函 数,分析它们的动态特性和主要性能参数。
忽略Bp后近似为:
K ce h Ap
e mt
Vt
2 h
K c mt 2 h Ap
标准传递函数形式:
K ps Ap 1 Vt X v 1 s FL K K 4 e K ce Xp s s 2 2 o 1 2 s 1 o r o
简化为:
s FL Xp 2 s 2 h K K ce K s 1 s 2 2 h h Kh Ap
Kq K ce Vt X v 2 1 Ap Ap 4 e K ce
综合固有频率:
o h
K 1 Kh
综合阻尼比:
Bp 1 4 e K ce o 2o Vt 1 K K h mt
或进一步简化为:
s FL Xp K ce K s 2 2 h s 1 s 2 2 Ap h h Kq K ce Vt X v 2 1 Ap Ap 4 e K ce
(三) 其它简化形式:
Xp Xv Kq Ap K ce mt s 2 s 1 Ap Kq Ap Kq Ap s s 1 1
根据阀控液压缸的拉氏变换方程式绘出系统方框图。
三位四通电液比例阀控缸动力机构的数学建模
+
ξ 2
( 1)
s +1
式中 : Cd 为比例阀节流口的流量系数 ; pL0为系统平衡点的负载压力 ; ρ 为油液的密度 ; w b0为动力机构位于平衡点时节流口 B 的面积 梯度 ( m ) 。 ( 1 ) 面积梯度的计算 比例方向阀的节流口一般由在圆周方向均匀分布 的几个节流槽组成 。面积梯度与阀芯节流槽的形状有 关 , 常见的比例方向阀节流槽的形状有三角形 、矩形 和半圆形等几种 。 节流口 B 的面积梯度为 9A b ( 6) w b0 = = nb w i 9xev x = x 其中 : xev0为动力机构的平衡点的有效阀芯位移 , nb 为节流口 B 的节流槽的数目 , w i 为节流槽的面积梯 度。 当节流槽为矩形时 , 其面积梯度 w i 为常数 , 计 算公式为
Abstract: Taking an asymmetric p roportional direction valve controlling cylinder as an examp le, the p roblem how to build a math model suiting for all kind of 4 /3 2 way p roportional2valve 2control2cylinder actuating unit was solved. back p ressure, oil p ipe, leakage, shape of throttle slot, and balance position. the sim ulation result show s the p rovided method for math modeling was correct . Keywords: 4 /3 2 way electro 2hydraulic p roportional direction valve; Valve 2control2cylinder actuating unit; M athematics modeling This model allow s for the effect of The comparsion betw een the experi m ental result and
三位四通电磁阀
三位四通电磁阀提高人们的节约意识,刺激更多的节约措施和节能产品进入市场,建立节约型社会指日可待。
跨区输电价格调研开始长江电力建言献策三峡电站电能销售合同的主体是华中、华东和南方电网公司,存在跨区域电能交易6月19日,由国家电监会价格与财务监管部主任邹逸桥率领的跨区域输电价格调研组一行11人与长江电力公司负责电力市场营销的有关领导及工作人员进行了交流,并参观了三峡-葛洲坝梯级枢纽电站。
按照国家电监会跨区域交易输电价格监管调研提纲的要求,长江电力提前对一、技术参数:型号2W160-10 2W160-15 2W200-20 2W250-25 2W350-35 2W400-40 2W500-50 符号使用液体空气、水、油、瓦斯动作方式直动式型式常闭式流量孔径mm 16 20 25 35 40 50 CV值 4.8 7.6 12 24 29 48 接管口径3/8″1/2″3/4″1″ 1 1/4″ 1 1/2″2″使用流体粘滞度20CST以下使用压力**kg/cm2 水0.5 空气0~7 油0~7最大耐压力kg/cm2 10工作温度-5~80使用电压范围±10%本体材质黄铜油封材质NBR,EPDM或VITON二、技术参数:型号2L170-10 2L170-15 2L170-20 2L200-25 2L300-35 2L300-40符号使用流体蒸汽、水、空气动作方式引导体(先导式)型式常闭式流量孔径mm 17 25 30 50 CV值 4.8 12 20接管口径3/8″1/2″3/4″1″ 1 1/4″ 1 1/2″2″使用流体粘滞度20CST以下使用压力**kg/cm2 蒸汽、热空气、油0.5~15 蒸汽、热空气、油1~15最大耐压力kg/cm2 20工作温度-5~150℃使用电压范围±10%本体材质黄铜油封材质EPDM 聚四氟乙烯一、概述:工洲牌ZBF22Q-6~250型电磁球阀是二位二通自保持自动阀门,其开(关)阀由内、外部回路共同控制,当开(关)阀信号接通时,线圈励磁,产生旋转力矩,带动球阀阀芯转动,阀芯转到全开(关)位置时,阀内部机构自断电,阀保持开(关)位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
v
( 2 ) 系统平衡点的负载压力 pL0的计算 pL0 o = ( Ff + Fw - Fe ) /A 2 ( v > 0 ) pL0 = pL0 n = ( Ff - Fw + Fe ) /A 1 ( v < 0 )
( 10 )
212 固有频率 ωn 的确定 ωnn = 2 A 1 A pβ e / ( V e m tp ) ( v < 0 ) ( Pa ) ; 式中 : β e 为油液的有效体积弹性模量 m tp为活塞 、油液及负载等效到活塞上的总质 量 ( kg) ; V e 为缸的等效容积 , ωn = ωno = 2
v
Kux 主要根据阀芯运动的最大位移和对应的最大
v
输入控制电压幅值来确定 。对每一个电液比例方向阀 来说 , 其最大控制电压幅值是已知的 , 一般为 10V; 但厂家一般不提供最大阀芯位移值 。 一般来说 , 阀芯位移是比较小的 , 属于毫米级 。 假设一个阀的最大阀芯位移为 xvm , 其最大控制电压 为 um , 则有
第 8期
肖体兵 等 : 三位四通电液比例阀控缸动力机构的数学建模
油口 B、油口 T排回 油箱 , 缸活塞向下运动即缸活塞运动速度 v < 0。
21112 比例阀的流量增益 Kq 的确定
Kqo = Cd ja ( 1 + ia ) w b0 Kq = Kqn = Cd ja ( 1 + ia ) w b0 ps - pL0 - ia pb
Guy ( s) =
1
TR s + 1 Tx s + 1
v
・
Kx
v
・
s
kq /A p s
2
ωn ω2 n
+
ξ 2
=
s +1
Kuv s ( TR s + 1 ) ( Tx s + 1 )
v
s
2
ωn ω2 n 式 中 : Kuv 为 阀 的 输 入 电 压 - 缸 运 动 速 度 增 益 -1 -1 (m・ s ・ V ); TR 为电控器斜坡发生器的时间常数 ( s) , 响 应比较快的阀一般可以不考虑 , 即取 0; Tx 为阀芯运动的时间常数 ( s) ; ωn 为阀控缸动力机构的固有频率 ( rad / s) ; ξ 为阀控缸动力机构的无因次阻尼比 。 若去掉式 ( 1 ) 中的积分环节 , 即可以得到以缸 活塞速度 v为输出的动力机构的传递函数 。 2 动力机构传递函数参数的确定 比例方向阀种类比较多 , 下面以德国力士乐公司 的比例方向阀为例来探讨如何确定式 ( 1 ) 所示的动 力机构传递函数的各个参数 。 211 Kuv的确定
v
+
ξ 2
( 1)
s +1
式中 : Cd 为比例阀节流口的流量系数 ; pL0为系统平衡点的负载压力 ; ρ 为油液的密度 ; w b0为动力机构位于平衡点时节流口 B 的面积 梯度 ( m ) 。 ( 1 ) 面积梯度的计算 比例方向阀的节流口一般由在圆周方向均匀分布 的几个节流槽组成 。面积梯度与阀芯节流槽的形状有 关 , 常见的比例方向阀节流槽的形状有三角形 、矩形 和半圆形等几种 。 节流口 B 的面积梯度为 9A b ( 6) w b0 = = nb w i 9xev x = x 其中 : xev0为动力机构的平衡点的有效阀芯位移 , nb 为节流口 B 的节流槽的数目 , w i 为节流槽的面积梯 度。 当节流槽为矩形时 , 其面积梯度 w i 为常数 , 计 算公式为
0 引言 电液比例方向阀 , 由于可以实现连续和比较精确 地控制和调节液压系统的压力和流量及液流方向 , 其 性能优于普通的开关阀 , 又比电液伺服阀制造简单 , 价格便宜 , 更适合于比较恶劣的工作环境 , 在工业工 [1 ] 程中得到了越来越广泛的应用 。 而阀控缸动力机构 的动态特性是衡量液压系统设计及调试水平的重要指 标 , 因此建立其数学模型就变得尤为重要 。然而 , 目 前对比例方向阀控缸动力机构的数学建模 , 大多数都 局限于对称阀控制对称缸或对称阀控制不对称缸和背 压为 0 的分析 。而在工程的实际应用中 , 不对称阀控 制不对称缸是最常见的情形 , 考虑到实际应用的情 况 , 笔者以非匹配的三位四通不对称阀控制不对称缸 动力机为研究对象 , 研究如何建立适用于所有的三位 四通电液比例阀控缸动力机构的数学模型 。 1 三位四通电液比例阀控缸动力机构及其传递
2008 年 8 月 第 36 卷 第 8 期
机床与液压
MACH I N E TOOL & HYDRAUL ICS
Aug12008 Vol136 No18
三位四通电液比例阀控缸动力机构的数学建模
肖体兵 , 肖世耀 , 廖辉 , 吴百海
(广东工业大学 , 广东广州 510090 )
摘要 : 以不对称电液比例方向阀控制不对称缸的动力机构为例 , 给出了建立适用于所有的三位四通电液比例阀控缸动 力机构 、考虑了背压力 、油管 、泄漏 、节流槽形状 、平衡点位置等诸多因素影响的数学模型 。通过实验和仿真的对比 , 证 明了建立数学建模的方法是正确的 。 关键词 : 三位四通电液比例阀 ; 阀控缸动力机构 ; 数学建模 中图分类号 : TH137 文献标识码 : A 文章编号 : 1001 - 3881 ( 2008 ) 8 - 080 - 3
M a thema tics M odelin g of the Actua tin g Un it w ith a 4 / 3 2way Electro 2hydraulic Proportiona l Va lve Con trollin g Cylin der
XI AO Tibing, X I AO Shiyao, L I AO Hui, WU B aihai ( Guangdong University of Technology, Guangzhou Guangdong 510090, China )
Abstract: Taking an asymmetric p roportional direction valve controlling cylinder as an examp le, the p roblem how to build a math model suiting for all kind of 4 /3 2 way p roportional2valve 2control2cylinder actuating unit was solved. back p ressure, oil p ipe, leakage, shape of throttle slot, and balance position. the sim ulation result show s the p rovided method for math modeling was correct . Keywords: 4 /3 2 way electro 2hydraulic p roportional direction valve; Valve 2control2cylinder actuating unit; M athematics modeling This model allow s for the effect of The comparsion betw een the experi m ental result and
ev ev0
wi =
Qm nb Cd xevm
ρ Δp 2
( 7)
式中 : Qm 为阀的节流口在压降 Δp下的最大流量 ; xevm为最大阀芯有效位移 ( m ) , 与阀芯死区位 移 xd 有关 。
xevm = xvm - xd
( 8)
Kuv = Kux Kq /A p
v
( 2)
-1
式中 : Kux 为阀的输入电压 - 阀芯位移增益 ( m・ V 2 -1 Kq 为比例阀的流量增益 ( m ・ s ); A p 为缸的等效活塞面积 ,
ρ( ja + ia ) 2 ρ( ja + ia ) 2
2 3
2
3
( v > 0)
( v < 0)
ia ( ps - pL0 ) - pb
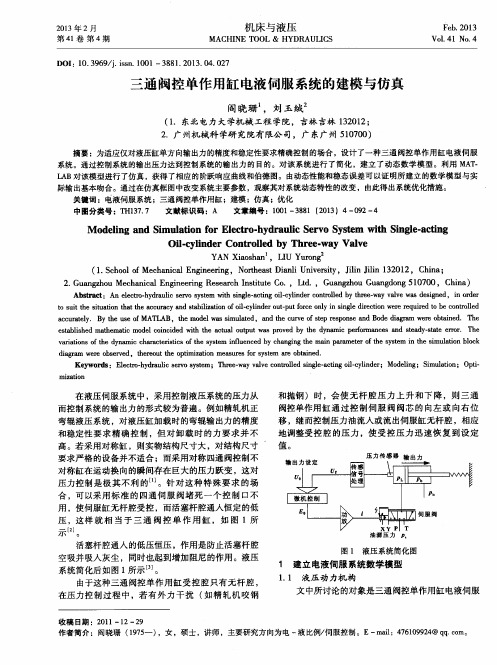
图 2 电液比例阀控缸位置伺服系统
( 5)
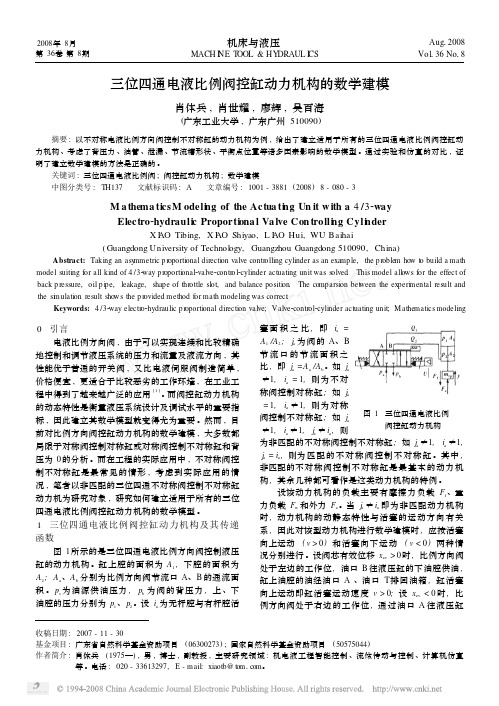
电液比例阀控缸位置伺服系统的控制框图如图 2 所示 , 图中的虚线框内部分即为阀控缸动力机构 。阀 控缸动力机构的输入为电液比例方向阀的电控器的控 制电压 u, 输出为液压缸的活塞位移 y0 。则以电压 u 为输入 、缸活塞位移 y0 为输出的三位四通电液比例 [2 ] 阀控缸动力机构的传递函数为
塞 面 积 之 比 , 即 ia = A 1 /A 2 ; ja 为阀的 A、 B 节流口的节流面积之 比 , 即 ja = A a /A b 。如 ja ≠1, ia = 1, 则为不对 称阀控制对称缸 ; 如 ja = 1, ia ≠1, 则为对称 图 1 三位四通电液比例 阀控制不对称缸 ; 如 ja 阀控缸动力机构 ≠1, ia ≠1, ja ≠ ia , 则 为非匹配的不对称阀控制不对称缸 ; 如 ja ≠1, ia ≠1, ja = ia , 则为匹配的不对称阀控制不对称缸 。其中 , 非匹配的不对称阀控制不对称缸是最基本的动力机 构 , 其余几种都可看作是这类动力机构的特例 。 设该动力机构的负载主要有摩擦力负载 Ff 、重 力负载 Fw 和外力 Fe 。当 ja ≠ ia 即为非匹配动力机构 时 , 动力机构的动静态特性与活塞的运动方向有关 系 , 因此对该型动力机构进行数学建模时 , 应按活塞 向上运动 ( v > 0 ) 和活塞向下运动 ( v < 0 ) 两种情 况分别进行 。设阀芯有效位移 xev > 0 时 , 比例方向阀 处于左边的工作位 , 油口 B 往液压缸的下油腔供油 , 缸上油腔的油经油口 A 、油口 T 排回油箱 , 缸活塞 向上运动即缸活塞运动速度 v > 0; 设 xev < 0 时 , 比 例方向阀处于右边的工作位 , 通过油口 A 往液压缸