钻机模块介绍
海洋石油平台-模块钻机火气系统逻辑
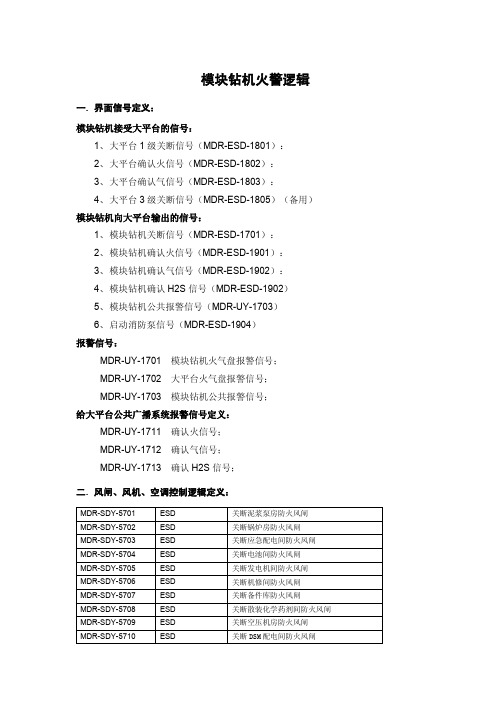
模块钻机火警逻辑一.界面信号定义:模块钻机接受大平台的信号:1、大平台1级关断信号(MDR-ESD-1801):2、大平台确认火信号(MDR-ESD-1802):3、大平台确认气信号(MDR-ESD-1803):4、大平台3级关断信号(MDR-ESD-1805)(备用)模块钻机向大平台输出的信号:1、模块钻机关断信号(MDR-ESD-1701):2、模块钻机确认火信号(MDR-ESD-1901):3、模块钻机确认气信号(MDR-ESD-1902):4、模块钻机确认H2S信号(MDR-ESD-1902)5、模块钻机公共报警信号(MDR-UY-1703)6、启动消防泵信号(MDR-ESD-1904)报警信号:MDR-UY-1701 模块钻机火气盘报警信号;MDR-UY-1702 大平台火气盘报警信号;MDR-UY-1703 模块钻机公共报警信号;给大平台公共广播系统报警信号定义:MDR-UY-1711 确认火信号;MDR-UY-1712 确认气信号;MDR-UY-1713 确认H2S信号;二.风闸、风机、空调控制逻辑定义:MDR-SDY-5701 ESD 关断泥浆泵房防火风闸MDR-SDY-5702 ESD 关断锅炉房防火风闸MDR-SDY-5703 ESD 关断应急配电间防火风闸MDR-SDY-5704 ESD 关断电池间防火风闸MDR-SDY-5705 ESD 关断发电机间防火风闸MDR-SDY-5706 ESD 关断机修间防火风闸MDR-SDY-5707 ESD 关断备件库防火风闸MDR-SDY-5708 ESD 关断散装化学药剂间防火风闸MDR-SDY-5709 ESD 关断空压机房防火风闸MDR-SDY-5710 ESD 关断DSM配电间防火风闸MDR-SDY-5711 ESD 关断变压器间防火风闸MDR-SDY-5712 ESD 关断VFD间防火风闸MDR-SDY-5713 ESD 关断值班室防火风闸MDR-SDY-5714 ESD 关断DES配电间防火风闸MDR-SDY-5715 ESD 关断泥浆实验室防火风闸三.火气探测/报警逻辑火焰探头火焰探头安装在能够涵盖畅通区域的场所,当探头在所在的火区探测时要注意以下要点:启动安装在模块钻机的火气盘的公共报警和确认火报警装置,启动平台状态灯和PA 系统(由大平台触发,钻机传信号给大平台),并启动消防系统和关断系统。
钻机组成及各部分的工作原理
钻机组成及各部分的工作原理钻机是一种用于地下或水下钻探的设备,它由多个部分组成,每个部分都有着特定的工作原理。
本文将从整体结构和各部分的工作原理两个方面来介绍钻机。
一、钻机的整体结构钻机通常由底座、钻杆、钻头、钻具、钻杆回转系统、提升系统、驱动系统和控制系统等部分组成。
1. 底座:钻机的底座是支撑整个机器的基础,具有稳定性和承重能力。
它通常由钢铁材料制成,能够承受高强度的工作环境。
2. 钻杆:钻杆是将动力传递给钻头的关键部分,由多根连接在一起的钢管组成。
钻杆的长度和直径根据钻探深度和孔径大小来确定。
3. 钻头:钻头是钻机的工作部分,通过旋转和冲击地层来实现钻探的目的。
钻头通常由合金钢制成,具有较强的硬度和耐磨性。
4. 钻具:钻具是连接钻杆和钻头的部分,可以使钻杆和钻头保持连接并传递动力。
钻具通常包括套管、钻铤和钻杆接头等。
5. 钻杆回转系统:钻杆回转系统是使钻杆和钻头产生旋转运动的部分。
它通常由液压系统和传动装置组成,能够提供足够的扭矩和转速。
6. 提升系统:提升系统用于控制钻杆的上下运动,实现钻杆的进给和回收。
它通常由液压缸、钻塔和卷筒等组成,能够实现高效的提升作业。
7. 驱动系统:驱动系统是提供动力给钻机各部分的关键部分,通常由柴油机或电动机等驱动装置组成。
驱动系统能够提供足够的功率和转速,满足钻机的工作需求。
8. 控制系统:控制系统是对钻机进行操作和控制的部分,通常由液压系统、电气系统和自动控制装置等组成。
控制系统能够确保钻机的稳定运行和安全作业。
二、钻机各部分的工作原理1. 钻杆和钻头:钻杆通过钻具连接在一起,传递驱动力给钻头。
钻头在旋转的同时,利用冲击力将地层破碎,实现钻探的目的。
2. 钻杆回转系统:钻机的液压系统和传动装置提供足够的扭矩和转速,使钻杆和钻头产生旋转运动。
旋转运动可使钻头均匀地破碎地层,提高钻探效率。
3. 提升系统:提升系统通过液压缸、钻塔和卷筒等实现钻杆的上下运动,控制钻杆的进给和回收。
钻机模块结构讲义

DES井架模型
SACS的合成模型
这个是吊装模型,所以 井架只保留下面部分
服务臂
服务臂
番禺钻机模块
箱形梁
DSM模块
平面布置图(33.9m)
平面布置图(37.8m)
平面布置图(45.5m)
DSM模块的吊装
吊眼
P-TANK 模块
限位孔
棘爪装置(液压移动)
吊眼
DES的箱ቤተ መጻሕፍቲ ባይዱ梁(平台东西方向)
DES箱形梁的主要作用
一、起支撑DRILL FLOOR 上结构和设备的作用; 二、起滑道的作用; 三、起DES模块吊装主杆件的作用
DRILL FLOOR
与箱形梁连接 一、支撑DRILL FLOOR 上的结构及设备。 的四个节点
钻机模块结构讲义
西江钻机模块的概况
1、 钻机方位 XJ23-1模块钻机安装在南海西江23-1平台。钻 机模块由钻机设备模块(DES)和钻机支持模块(DSM)组成 和一个P-TANK橇组成 。 2、钻机基本参数
井架
钻井深度:5000 m 绞车功率:1500 HP 自升式井架载荷:315 MT 交流变频顶驱:1000 HP
DES DSM P-TANK
泥浆泵:1600 HP× 2台
柴油发电机:1450KW× 4台 DES 780t;DSM 1165t
旅大钻机模块建造成型后照片
DES模块
DSM模块
P-TANK
钻机模块在平台上的布置
钻机模块在平台的布置
钻机模块的主要结构型式和作业路径
一、DES模块 二、DSM模块
三、P-TANK
DES模块整体模型
DRILL FLOOR(45.5m)
(完整版)钻机八大系统组成及作用

钻机定义石油钻井的地面配套设备称为钻机,石油钻机是由多种机器设备组成的一套大功率重型联合工作机组。
钻机八大系统(1)起升系统组成:天车、游车、大钩、绞车、滚筒、钢丝绳以及吊环、吊卡、吊钳、卡瓦等井口工具。
作用:下放、悬吊或起升钻柱、套管柱和其它井下设备进、出井眼;起下钻、接单根和钻进时的钻压控制。
(2)旋转系统组成:转盘、水龙头、钻头、钻柱。
作用:保证在钻井液高压循环的情况下,给井下钻具提供足够的旋转扭矩和动力,以满足破岩钻进和井下其它要求。
(3)循环系统组成:泥浆泵、地面管汇、泥浆罐、泥浆净化设备。
其中地面管汇包括高压管汇、立管、水龙带,泥浆净化设备包括振动筛、除砂器、除泥器、离心机等。
作用:从井底清除岩屑;冷却钻头和润滑钻具。
泥浆泵号称钻机的“心脏”泥浆的循环流程:泥浆泵-地面高压管汇-立管-水龙带-水龙头-钻柱(方钻杆、钻杆、钻铤)-钻头-环形空间-地面排出管线-固控设备-泥浆池-泥浆泵起升系统、循环系统和旋转系统是钻机的三大工作机组(4)动力系统组成:柴油机、电动机。
作用:为整套机组(三大工作机组及其他辅助机组)提供能量。
(5)传动系统组成:联轴器、离合器、变速箱、皮带传动、链条传动等装置作用:把动力传递给泥浆泵、绞车和转盘(三大工作机)(6)控制系统组成:机械控制、气控制、电控制和液控制等。
作用:控制各系统、设备按工艺要求进行。
司钻通过钻机上司钻控制台可以完成几乎所有的钻机控制:如总离合器的离合;各动力机的并车;绞车、转盘和钻井泵的起、停;绞车的高低速控制等。
(7)钻机底座系统组成:钻台底座、机房底座。
作用:支撑和安装各钻井设备和工具,提供钻井操作场所,方便钻机设备的移运。
(8)辅助设备系统组成:供气设备、辅助发电设备、井口防喷设备、钻鼠洞设备及辅助起重设备等。
作用:协助主系统工作,保证钻井的安全和正常进行。
钻机模块简介
天车向下鸟瞰图
生活区,所 谓的海景房
BY@gs,2015/7/9
天车 井架 derrick
钻 台 面 DRILL FLOOR
游车 大钩 顶驱
井架是一个约50米高的钢结构,重100-200吨。顶部装有天车 (Crown block assembly),约1000米钢丝绳,挂游车大钩(Travelling block),挂顶驱(Top drive) 顶驱是钻井核心设备,全自动液压驱动,价格昂贵。
主配电间
钻井支持模块(DSM)是为DES模块钻井提供电力,高压泥
浆,设备仪表控制空气的机电设备模块。主要设备: 柴油发电机组,(4 x 1000KW)
高压泥浆泵(HP Mud pumps)每台功率1200KW,约40吨。
空气压缩机及干燥器(Air compressors & air dryer)。 泥浆混合泵,输送泵,增压泵
防喷器控 制系统
防喷器
泥浆回收系统(Mud treatment systems)有振动筛(Shale shaker),除泥沙,除钻屑,除害气柜及设备。
振动筛
离心机 泥浆罐区域
基座是一个可以在甲板轨道上滑动,支持钻台和井架的钢结构。
导轨滑移系统
DES模块上,各种类型的机动,液动,气动和各个电气控制 柜,用不同电缆,不同管线,组成一座自动控制的钻井设备。
钻机模块简介
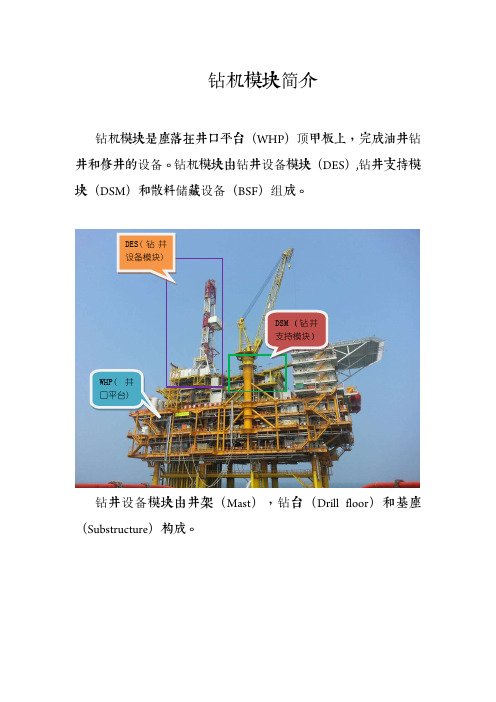
钻机模块是座落在井口平台(WHP)顶甲板上,完成油井钻 井和修井的设备。钻机模块由钻井设备模块(DES),钻井支持模 块(DSM)和散料储藏设备(BSF)组成。
DES( 钻 井 设备模块)
WHP( 井 口平台)
DSM ( 钻 井 支持模块)
钻井设备模块由井架(Mast),钻台(Drill floor)和基座 (Substructure)构成。
Atlas Copco LBP16M模块性钻孔机说明书

LBP16MHandheld drilling has never been more flexible.It is never just a drill. Wether you are building an aircraft, assembling a car or manufacuting a windmill, your choice of drilling tools determines how accurate the result becomes.The correct angle and point of entry is an important issue – with a surprisingly simple solution. Atlas Copco offers a complete tool, with one powerful motor unit, completely interchangeable with different heads, giving you a total solution. Whether it is steel or composite – you will have a perfect result.The lubrication free motor means a cleanerworking environment. A complete SEAL module keeps dust out of the motor, and the adjustable air exhaust directs the cool air away from the operator.The Pistol Motor modelsWith a range of six pistol motor models you will have no trouble finding a tool thatsuits your exact need.The rubber grip makes sure it lies perfectly in hand with wings and a round edged trigger to better fit and steadythe finger. T he smaller rear end and the handle angle is optimal for a comfortableworking position.BCFEGDHIALBD16MKFeaturesThe Straight Motor models With a range of six straight motor models – three models with low speed motor and three with high speed – you can besure to meet a perfect match.The rubber grip and safetytrigger make sure you avoidunintended starts and the reliable motor lies comfortable in hand. T he operator can easily adjust speed and power foroptimized drilling.CE IJA A Lubrication free motormeans a cleaner workingenvironment.B A small rear end for a goodfit to the hand.C Comfortable rubber grip.D Correct handle angle fora comfortable workingposition.E Adjustable air exhaustdirects the cool air awayfrom the operator.F Trigger with rounded edgesfor a good fit to the finger.G Speed control trigger.H Wings guide the operators’finger for a steady grip.I Dust and dirt stay out of themotor thanks to a completeSEAL module.J Safety T rigger to avoidunintended start.K Speed adjuster.Drilling behind a panel, at an angle…not a problem.MODULAR DRILL HEADS-DIMENSIONSStraight Head1234567891. BHM90EZC-6-62. BHM90ZC-6-63. BHM90EZT -1-44. BHM90ZC-5-0A wide variety ofangle heads guarantee you to find an optimal solution for your drilling needs. All angle heads in the BHM-series have a freewheel – making it easy to fit them into the motor unit.1011121314155. BHM0C-5-06. BHM90C-5-07. BHM30C-5-08. BHM30C-6-69. BHM45C-5-010. BHM90C-6-611. BHM90C-8-012. BHM90EC-5-013. BHM30ET -1-414. BHM30EC-6-615. BHM45EC-5-016. Extension for chuck16MODULAR DRILL MOTOR UNITSMODULAR DRILL HEADSaT he free speed is given when used with a 90° angle head. b Multiply this value with the Speed ratio to get the free speed of each angle head.For more information regarding off-set drills, please contact Atlas Copco local sales representativeModelStraight motor unitsExtension for Chuck(3/8”-24 UNF)Safety LeverCOLLETS FOR 5.0 MM CAPACITY HEADS (BHMC-5-0)COLLETS FOR 6.6 MM CAPACITY HEADS (BHMC-6-6)COLLET FOR 8.0 MM CAPACITY HEAD (BHM90C-8-0)SERVICE KITSKey wrenches,Collet or chuck with key3 mm collet (5.0 collet capacity head)6 mm collet (6.6 collet capacity head)8 mm collet (8.0 collet capacity head)ACCESSORIES INCLUDED OPTIONAL ACCESSORIES Short Lever9833 2006 01, 2020:1 © A t l a s C o p c o A B , S Atlas Copco AB(publ) SE-105 23 Stockholm, Sweden Phone: +46 8 743 80 00Reg. no: 。
海洋平台钻机模块仪表系统设计
o i r et t ath r h ftr r u hss m i as ie ee pn po c.A s teb g tuue o sc t l gvnh r. g j l i f ye s o
Ke r s: d l n g mo u e; i sr me ts se ; d sg y wo d i i i r l gr d l n tu n y t m ei n
场 仪 表构成 。
种 ,由于钻机模块作为海洋平 台的一部分 ,其设计 受 海 洋平 台的结构 载荷 、空 间 的限制 ,其设 计有 其
特殊 的地 方 ,是一 种 高度模块 化 的钻机 。 钻机 模块 仪表 系统 的设计 是钻 机模 块设计 的主 要 内容 之一 ,是测 量钻 井参数 和监 控钻 机正 常工 作
部分 ,它为现场仪表提供电源 ,并将现场仪表数据 采 集输 入系 统 ,经系统 处理 后将 数据 送入 数据存 储 监 控工 作站 进行储 存 监控 ,同时将送 入 司钻房显 示 系 统供 司 钻 监 控 。数 据 采 集 处 理 系 统 电源 由 U S P 供 电 ,电源 为 10 A 0 z 由于钻 井井 场 对 防爆 2 V C6 H 。 要求比较高 ,现场仪表都采用本质安全性仪表 ,因 此数据采集系统配备了安全隔离栅 , 安全栅与数据 采 集系统 均 安装 于一 个 系统 柜 内 。M/ o o公 司 D Tt c
旋挖钻机构造详细介绍
旋挖钻机构造详细介绍旋挖钻机是一种用于钻取土壤和岩石的机械设备,主要用于建筑工程、桥梁建设、地基处理和地下管道安装等领域。
旋挖钻机由以下几个部分组成:1.底盘:旋挖钻机的底盘是整个机器的基础,它由钢铁制成,具有良好的稳定性和承载能力。
底盘通常包括履带、行走机构、底盘架、转台座等部分,以便机器能够在不同的工作场地上移动和转向。
2.主机:主机是旋挖钻机的核心部件,它包括发动机、液压系统和控制系统。
发动机提供动力给旋挖钻机,使其能够进行钻孔和施工操作;液压系统通过液压油提供动力和力矩,驱动钻杆和钻头完成钻孔任务;控制系统用于监控和控制机器的各项操作,比如调整转速、控制行走速度和修改钻杆角度等。
3.钻杆:钻杆是旋挖钻机进行钻孔作业的工具,它由多节组成,一般采用高强度合金钢制成。
钻杆通过液压系统驱动旋转,同时也能进行升降和前后移动,以便于机器进行钻孔和抽取土壤样本。
4.钻头:钻头是固定在钻杆末端的具有锥度的金属部件,在施工过程中通过旋转和挤压的方式将土壤和岩石破碎和钻入。
钻头的形状和材料根据工程要求和钻孔条件的不同而有所差异。
5.驾驶室:驾驶室是旋挖钻机操作员的工作空间,它具有良好的视野和操作控制设备。
驾驶员可以通过控制面板和操纵杆来控制机器的运行、工作参数和钻杆的移动。
6.辅助设备:旋挖钻机还可以配备各种辅助设备,包括抽取土壤样品的取样器、切割岩石的挖斗和岩石破碎机等。
这些设备可以根据具体的施工需求进行选择和调整。
旋挖钻机的工作原理是通过旋转和挤压的方式将钻头钻入土壤或岩石中,从而完成钻孔和施工任务。
在工作过程中,旋挖钻机需要根据不同的地质条件和施工要求选择合适的钻头和钻杆,并通过调整转速、钻杆角度和钻进力度等参数来控制钻孔深度和直径。
同时,驾驶员需要通过控制驾驶室中的操纵杆和控制面板来控制机器的行走、旋转和钻杆的移动。
总而言之,旋挖钻机是一种用于土壤和岩石钻孔施工的机械设备,它具有底盘、主机、钻杆、钻头、驾驶室和辅助设备等组成部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
辅助设备 供气设备、辅助发电设备、钻鼠洞设备、辅助起重设备、工作间/控 制间/储藏间等、固井设备、测井设备、录井设备
SY/T 5323-92 SY/T 5244-91
The types and basic parameters for oil drilling rigs Specification for wire rope for petroleum and gas plant Main hoisting equipment for drilling rig Kill & choke manifold Drilling fluid manifold Safety rules for offshore fixed platform (PRC Economy and Trade Committee 2000)
2、钻前准备
3、钻进(Drilling)
根据不同的地层情况、钻进深度、钻头类型等,使钻头转速n(r/min )、钻压P(t)、泵流量Q(L/min)和泥浆性能各自都处于最佳参数 值,以获得最快的钻进速度。
4、固井(Cementing) 在井眼内下入一层套管,并在套管与井壁的环形空间里灌注水泥浆进行封固。
钻井绞车、辅助刹车、游动系统(钢丝绳、天车、游动滑车及大沟) 、井架(热镀锌低合金钢制造)、起下操作的井口工具及机械化设备 (吊环、吊卡、卡瓦、动力大钳或“铁钻工”、立根移运机构)
动力驱动系统设备:为钻机相关设备提供动力
柴油发电机组及供油设备、或交流/直流电动机及其供电、保护、控制 设备等
传动系统设备:连接动力机与工作机,实现从驱动设备到工作机组的 能量传递、分配及运动方式的转换
4
海洋模块钻机介绍 三、钻井工艺过程
1、井身结构(Well Structure)与钻具组合(Bottom Hole Assembly)
(1)井身结构:下入井中的套管层数、尺寸、规格和长度以及各层套管 相应的钻头直径。
① 导管(Conductor):防止地表土层垮塌,引导钻头入井,并导引上返 的钻井液流入净化系统。通常下入的深度为30~50m。
5、完井(Well Completion) 合理的井底结构应保证:油层具有最大的渗透面;油藏与油井有最好的流通性 ;能防止油、气、水互窜;对多层油井,能保证各油层互不窜通,以便进行
6
海洋模块钻机介绍
分层开采。 当下油层套管固井后,油层为水泥和套管封固,必须设法使油层与井 筒沟通,普遍采用射孔完井法。对于岩石比较坚硬和稳定的油(气) 层,在没有油、气、水互相干扰的情况下,可不采用将油(气)层用 水泥封固的完井方法,而采用裸眼完井法、贯眼完井法、衬管完井法 等方法来完井。
3
海洋模块钻机介绍
钻井新技术 (1)欠平衡钻井技术
钻进过程中保持钻井液柱静压头施加的井底压强地与井孔的地层压强 ,容许地层流体进入井内,循环出井,并在地面上得到处理和控制。 (2)深井、超深井钻机技术 (3)水平井技术 (4)小井眼钻井技术 (5)连续柔管钻井技术
目前海上常采用:顶部驱动旋转钻井法+平衡钻井技术
120/9000
1600~3000 2500~4000 3500~5000 4500~7000 5000~8000 7500~12000
1700(170) 400~550 (550~750)
8
2250(225) 735
(1000)
8
3150(315) 1100 (1500)
10
4500(450) 1470 (2000)
表示方法:ZJ70/4500DB
70——名义钻深:4-1/2” 钻杆 7000m 4500——最大钩载:4500kN DB——交流变(B)频电(D)动钻机 DZ——直(Z)流电(D)动钻机 JD——交(J)流电(D)动钻机
20
海洋模块钻机介绍
(2)钻机基本参数(钻机新行业标准:SY/T5609-1999)
SY/T 5033.1~2-92 API 4F API 6A API 7 API 7F API 8C API 9A API 16A API 16C API 16D
API RP 16E API RP 53 API RP 64
Surface BOP and BOP control unit Specification for drilling and well servicing structures Valves and wellhead equipment Specification for rotary drilling equipment Specification for chains and sprockets Specification for drilling production and hoisting equipment Specification for wire rope Specification for drill through equipment Specification for choke and kill systems Specification for control systems for drilling well control equipment Recommended practice for design of control systems for drilling well control equipment Recommended practice for blow out prevention systems Recommended practices for diverter systems equipment and operations
445,520,700
700(27-1/2”); 950(37-1/2”); 1260(49-1/2”)
5,6,7.5
7.5,9,10.5,12
各级钻机均采用可提升28m立根的井架,对15、20两级钻机也可采用提升19m的可 伸缩式井架
21
海洋模块钻机介绍
(3)钻机标准/规范
SY/T 5609-1999 SY/T 5170-1998 SY/T 5527-2001
海洋模块钻机设计 之系统与设备
海洋模块钻机介绍
一、钻井方法的介绍
➢顿钻钻井法(或冲击钻井法) ➢旋转钻井法 (1)转盘旋转钻井法
(2)井下动力钻具旋进钻井法(钻井液驱动)
a.涡轮钻具钻井 b.螺杆钻具钻井(容积式井下动力钻具)
(3)顶驱旋转钻井法(不用转盘和方钻杆)
顶驱钻井系统是一套安装于井架内 部空间、由游车悬持的顶部驱动钻井 装置。常规水龙头与钻井马达相结合,并配备一种结构新颖的钻杆上卸扣 装置(Pipehander),从井架空间上部直接旋转钻柱,并沿井架内专用 导轨向下松劲,可完成旋转钻井、倒划眼、循环钻井液、接钻杆(单根、 立根)、下套管和上卸管柱丝扣等各种钻井操作。
23
海洋模块钻机介绍
包括减速、并车、转向、倒转及变速机构
控制系统和监测仪表显示:为了指挥各机组协调的工作 机械控制、气控、电控、液控和电/气/液混合控制 钻井仪表,随钻测量系统(MWD——Measurement while Drilling ):监测显示地面有关系统设备工况,测量井下参数实现井眼轨迹 控制
④ 油层套管(Production String):下入井内的最后一层套管,形成坚 固的井筒,使生产的油或气由井底沿这层套管流至井口。
5
海洋模块钻机介绍
在各层套管与井壁的环形空间,都应注入水泥加固(固井);
(2)钻具组合:合理的钻具组合是确保优质快速钻井的重要条件。
制定钻机标准系列时,应根据与系列井深L相应的标准井身结构与钻具 组合,来确定钻机的有关基本参数。
钻机级别 基本参数
名义钻深范围 (114mm)钻杆
/m
最大钩载/kN (tf)
绞车最大输入功率 /kW (HP)
提升系 钻井绳数
统绳 数
最大绳数
钢丝绳直径/mm
可配置每台钻井泵功 率/kW (HP)
转盘开口名义直径 /mm
钻台高度/m
井架
30/1700
40/2250
50/3150
70/4500
90/6750 90/5850*
10
6750(675) 2210 (3000)
12
10
10
12
12
16
32(1-1/4“) 32(1-1/4“)
735 (1000)
35(1-3/8”)
960 1300
38(1-1/2”) 42(1-5/8”)
1180 (1600)
9000(900) 2940 (4000) 12
16
52(2”) 1470 (2000)
22
海洋模块钻机介绍
2、石油钻机的组成(顶驱钻井系统)
旋转设备:为了转动井中钻具,带动钻头破碎岩石
转盘和水龙头,顶驱钻井装置
循环系统设备:为了及时清洗井底、携带岩屑、保护井壁
钻井液循环设备,如钻井泵、地面高压管汇(泥浆高压管汇、立管管 汇)、钻井液净化及调配装置(固控设备)等
起升系统设备:为了起下钻具、下套管,控制钻压及钻头钻进等
海洋模块钻机介绍 钻采平台上的模块钻机(PY4-2/5-1)
17
海洋模块钻机介绍
2、海上钻井装置选择依据
海上钻井装置的选择是一个涉及面很广的问题,需要综合考虑各 种因素,概括起来有以下几方面: 钻井作业要求,是钻勘探井还是生产井,是直井还是丛式井以及 完井方式等; 作业海区的环境条件,包括:水深、风、波、潮流等海况,海底 地质条件及离岸距离等; 经济因素,主要指各种装置的建造成本、租金及操作费用; 可供选择的钻井装置及其技术性能、使用条件。