静力学第3章+力系的平衡
工程力学(静力学与材料力学)第三章力偶系详解

FB
r M2 0 ∑ M = 0 , FA sin
M 2 2r FA
M2 = 4M1 = 8kNm
2M 1 FO FB FA 8kN r
• 作业3-1,3-4,3-8
考虑CB部分为二力构件,得:
FC FA FB FC
例3-4
图示机构自重不记。圆轮上的销子 A 放在 摇杆 BC上的光滑导槽内。M 1 = 2kNm,OA = r = 0.5m 。图示位置OA⊥OB,α = 30°,且系统平衡。 求作用于摇杆 BC 上力偶的矩 M 2 及 O、B 支座的反 力。 解:受力分析
M1
R
F1
M
F2
2
M1 + M2 = rBA×F1 + rBA×F2 = rBA×( F1 + F2 ) = rBA×R = M
如有n个力偶,按上法依次合成, 最后得一力偶,合力偶矩矢为 M = M1 +M2 + … +Mn = ∑M I
B
rBA
A
F2
F1
任意个力偶可以合成为一个 合力偶,这个合力偶矩矢等于各 分力偶矩矢的矢量和。 M = M 1+ M 2+ … + M n = ∑M i
性质三
证:
力偶没有合力
仍用反证法,即假定力偶有合力,那么总可 找到一个与此力大小相等,方向相反而作用线 共线的力与此力平衡,即力与力偶相平衡。与 性质二矛盾。
性质一、二和三告诉我们力偶只能与力偶等 效而不能与单个力等效。
•力偶只能与力偶相平衡 力偶只能与力偶相平衡
§3-4 力偶系的合成
设有两个力偶,由性质一,将 力偶中两力分别移到两力偶作用面 交线上的两点 A 和 B,可得到两个 汇交力系,其合力分别为R 、 R ’ 。
3静力学第三章习题答案
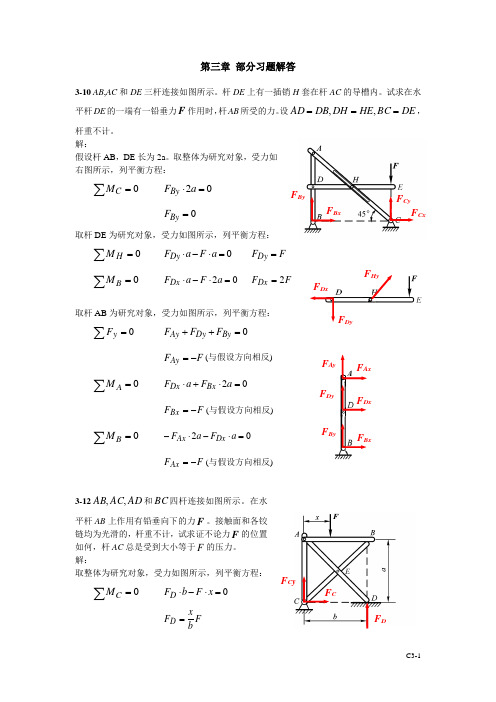
第三章 部分习题解答3-10 AB ,AC 和DE 三杆连接如图所示。
杆DE 上有一插销H 套在杆AC 的导槽内。
试求在水平杆DE 的一端有一铅垂力F 作用时,杆AB 所受的力。
设DE BC HE DH DB AD ===,,,杆重不计。
解:假设杆AB ,DE 长为2a 。
取整体为研究对象,受力如右图所示,列平衡方程:∑=0C M02=⋅a F By0=By F取杆DE 为研究对象,受力如图所示,列平衡方程:∑=0HM0=⋅-⋅a F a F DyF F Dy =∑=0B M 02=⋅-⋅a F a F DxF F Dx 2=取杆AB 为研究对象,受力如图所示,列平衡方程:∑=0y F0=++By Dy Ay F F FF F Ay -=(与假设方向相反)∑=0A M02=⋅+⋅a F a F Bx DxF F Bx -=(与假设方向相反) ∑=0B M02=⋅-⋅-a F a F Dx AxF F Ax -=(与假设方向相反)3-12AD AC AB ,,和BC 四杆连接如图所示。
在水平杆AB 上作用有铅垂向下的力F 。
接触面和各铰链均为光滑的,杆重不计,试求证不论力F 的位置如何,杆AC 总是受到大小等于F 的压力。
解:取整体为研究对象,受力如图所示,列平衡方程:∑=0C M0=⋅-⋅x F b F DF bx F D =F CF C yF DF CxF CyF BxF ByF DxF DyF HyF BxF ByF DyF DxF Ax F Ay取杆AB 为研究对象,受力如图所示,列平衡方程:∑=0A M0=⋅-⋅x F b F BF bx F B =杆AB 为二力杆,假设其受压。
取杆AB 和AD 构成的组合体为研究对象,受力如图所示,列平衡方程:∑=0E M02)2(2)(=⋅--⋅+⋅+bF x b F b F F AC D B解得F F AC =,命题得证。
注意:销钉A 和C 联接三个物体。
第3章 静力学平衡问题 (2)
例题
(2)再研究轮
FOx FOy FʹB
M
O
(F ) 0
FB cos R M 0
F
F
解得:
x
0
0
FOx FB sin 0
FB cos FOy 0
y
M FP R
FOx FP tg
FOy FP
【负号表示力的方向与图中所设方向相反】
由图示几何关系,在Rt△BFE和 Rt△EDA中
BD=BE+DE=1.2 2+
1.8 2
≈2.97(m)
∑ MA(F) =0 M-FA×BD=0
解得 FA=M/BD=269.36(N) FC=FA=269.36N
B
解法二:以整体作为研究对象, 画出受力图。
C
M FCy
FAx
FCx
列平衡方程
∑ Fx=0 ∑ Fy=0
§3-1 平面力系的平衡条件与平衡方程
例题
M A (F ) 0 : MB (F ) 0 MC (F ) 0
解得:
2 3M FA 3a 3P 3
FC
3 aM 0 2
3 a FA aP M 0 2 2 3 a FB a P M 0 2 2
FAx=FCx=190.48kN
【3-5】为了测定飞机螺旋桨所受的空气阻力偶,可将飞机水平放
置,其一轮搁置在地秤上。当螺旋桨未转动时,测得地秤所受的压
力为4.6 kN;当螺旋桨转动时,测得地秤所受的压力为6.4 kN。已 知两轮间的距离l=2.5 m。试求螺旋桨所受的空气阻力偶的力偶矩 M 的数值。
B
α
FNC
∑ MB(F) =0
基础篇 单元三 平面力系的平衡
当物系平衡时,系统内的每一部分都是平衡的。既可以选 择整个物系为研究对象,也可以选择其中的某几个或某一个物 体作为研究对象。
单元三 平面力系的平衡
课题三 物体系统的平衡
对于一般的静定物系平衡问题,应首先画出整体、局部或单 个物体的受力图,再从有已知力且未知量数少于或等于独立平衡 方程数的物体着手分析,便可解除全部未知量。若物系内分离体 均不符合可解条件,必须寻找有局部可解条件的分离体。
课题一 平面任意力系的平衡
单元三 平面力系的平衡
课题一 平面任意力系的平衡
由平衡方程可知,平面任意力系平衡的解析条件为:力系 中各力在两个任选的坐标轴上投影的代数和等于零,各力对力 系作用面内任意一点之矩的代数和等于零。除基本形式之外, 平面任意力平衡方程还可表示为二力矩形式。
M M
座的约束力。
解 (1)取齿轮轴为研究对象,画其受力图,如图3-2b。
(2)建立直角坐标系Axy,如图3-2b所示,列平衡方程求解
单元三 平面力系的平衡
课题一 平面任意力系的平衡
Fx 0 F FBx 0
解得 FBx F
M A(F) 0 FA 3a F 2a 2Fa Fa 0 解得 FA F
3 kN 11.4kN 2
将FT代入式(b)得 FAy G1 G2 FT sin 2.1kN
本题也可用二力矩式求解。
单元三 平面力系的平衡
课题一 平面任意力系的平衡
例3-3 减速器中的齿轮轴B端可分别简化为固定铰支座,
A端可简化为可定铰支座,如图3-2a所示。已知F、a,求两支
解 取工件为研究对象。工件在水平面受三个力偶和两个螺 栓的水平约束力的作用,三个力偶合成后仍为一力偶,若工件 平衡,必有一约束力偶与它相平衡,因此螺栓A和B的水平力 FNA和FNB必组成一力偶,方向如图3-5b所示,且FNA=FNB 。列 平衡方程
理论力学-3-力系的平衡

z
F2
O
F1
F
z
0
M F 0 M F 0
x y
自然满足,且
M F 0
z
M F 0
O
平面力系平衡方程的一般形式
于是,平面力系平衡 方程的一般形式为: z O y
Fx 0 Fy 0 M F 0 o
其中矩心 O 为力系作用面 内的任意点。
静不定次数:静不定问题中,未知量的个数与独立的平 衡方程数目之差。
多余约束:与静不定次数对应的约束,对于结构保持静 定是多余的,因而称为多余约束。 关于静不定问题的基本解法将在材料力学中介绍。
P A m a B q
解:对象:梁 受力:如图 方程:
C
b
F F
0, FAx P cosq 0, FAx P cosq # FAy FB P sin q 0 1 y 0, M A F 0, m FBa Pa bsinq 0 2
B A
FR FR
x
A
B
FR
A、B 连线不垂直于x 轴
B A
FR
x
3.3 平面力系的平衡方程 “三矩式” M A = 0, MB = 0 , MC = 0。
C B A C B A
FR FR
满足第一式? 满足第二式? 满足第三式?
B A
FR
FR
A、B、C 三点不 在同一条直线上
C A
B
M (F ) 0 Fy 0
A
FQ (6 2) FP 2 FB 4 W (12 2) 0
FQ FA FP FB W 0
工程力学3-力系的平衡条件和平衡方程
例1 例1 求图示刚架的约束反力。
解:以刚架为研究对象,受力如图。
F x0:F A xq b0
P a A
q
b
F y0:F A yP0
P
MA(F)0:
MA
MAPa12q b2 0
FAx
A
FAy
q
解之得:
FAx qb
FAy P
MAPa 1 2qb 2
例2 例2 求图示梁的支座反力。
解:以梁为研究对象,受力如图。
坐标,则∑Fx=0自然满足。于是平面 平行力系的平衡方程为:
O
F2
x
F y 0 ; M O ( F ) 0
平面平行力系的平衡方程也可表示为二矩式:
M A ( F ) 0 ; M B ( F ) 0
其中AB连线不能与各力的作用线平行。
[例5] 已知:塔式起重机 P=700kN, W=200kN (最大起重量), 尺寸如图。求:①保证满载和空载时不致翻倒,平衡块
解: 1.分析受力
建立Oxy坐标系。 A处约束力分量为FAx和FAy ;钢 索的拉力为FTB。
解: 2.建立平衡方程
Fx=0
MAF= 0
- F Q 2 l- F W xF T Blsi= n0
FTB= FPlxs+ iF nQ2 l= 2FlWxFQ
FAx F TBco = s0
Fy=0
F A = x 2 F W x l F Q l co= s3 3 F lW 0xF 2 Q
[例1] 已知压路机碾子重P=20kN, r=60cm, 欲拉过h=8cm的障碍物。 求:在中心作用的水平力F的大小和碾子对障碍物的压力。
解: ①选碾子为研究对象 ②取分离体画受力图
力系的平衡.ppt

2m
Fix 0
FAx FBx FT1
2 0 4 16
E FAx
FAz A FAy
D
4m
FBz
FT FT2
B FBx
y
FT1 C
FAx
30 100 6 6
2 100N 20
x
P
Fiy 0
FAy FT1
4 20
0
FAy
30 100 6 6
n
M B (Fi ) 0 M C (Fi ) 0
i 1
i 1
(AB连线不 垂直于x轴)
(A、B、C 三点不共线)
(2)平面力偶系:(各力偶Mi作用面相互平行即可)
n
Mi 0
i 1
一个独立方程!
(3)平面平行力系:
设各力与 y 轴平行
n
Fiy 0
i1
n
M A (Fi ) 0
M2 Mi
FR Fi 0
平衡方程仅有 MO Mi 0
O
M1
即 Mix 0, Miy 0, Miz 0 M3
(3)空间平行力系 —3个独立方程
z
F2
Fi
设各力平行于z 轴,则有
Fix 0, Fiy 0, Miz 0 x
平衡方程仅有
F3 O
F1
Fiz 0, Mix 0, Miy 0 y (4)其他
例如:空间各力与某轴 l 相交 ——仅有5个独
l
立的平衡方程
各力对 l 轴之矩恒为零
2.平面任意力系的平衡方程
第三章流体静力学(流体的平衡)
1.流体的平衡:绝对平衡、相对平衡 2.流体平衡时的压强 3.流体平衡的条件 3.1.平衡的微分方程 ∂ p dx ∂ p dx −∂ p dydz − p dydz = dxdydz ∂x 2 ∂x 2 ∂x 表面力: −∇ p dxdydz d 体积力: f b =∇ p 绝对平衡方程: f x 方向表面力: p −
∫ gy sin dA= g sin ∫ y dA= g y c sin A= P c A
A A
设压力中心坐标为
x D , y D = x C f , y C e ,其中 f 和 e 称为纵向和横向偏心矩。
则总合力对形心坐标轴的力矩:
F e =∫ dF = g sin ∫ y dA F f =∫ dF = g sin ∫ y dA∇ p d r =0
d 考虑到绝对平衡方程,得出等压面的微分方程: f b r = 0 ,即在等压面上体力处处与等压面 垂直。
3.3.流体平衡的必要条件
b =∇× 由绝对平衡方程得 ∇× f 1 −1 ∇ p = 2 ∇ ×∇ p
−1 ∇ p⋅∇ ×∇ p =0 3 ⋅∇ × f =0 流体平衡的必要条件 f b b b⋅∇ × f b = 于是 f
均质流体 =constant
≡0 ∇× f b
−∇ =
1 ∇p
=
−p
非均质流体:正压流体 = p ,如等温或绝热气体 定义压力函数 P p : ∇ P =
=∇ P 由绝对平衡方程得, f b 4.流体静力学基本方程(静力学规律)
由 P =− gz C 得
∇p p ≡0 ,故 f 有势,势函数 =− P p ∇× f b b
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G FR = 0
G F2
G R
G F3
G F2
G F3
G F4 4
G R′
o o
G F4
G F1
R′ R
平面汇交力系的平衡方程 物体在平面汇交力系作用下平衡的必要和充分条件 G 是合力等于零。
FR = 0
FR = (∑ Fxi ) 2 + (∑ Fyi ) 2 = 0
解析条件是各力在x轴和y轴上投影的代数和分别为零。 平面汇交力系的平衡方程:
FA + FB − P 1−P 2 −P 3 =0
例: 长度为l的均质细长杆,其重量W集中在中点 处,现在被水平力FP限制在如图所示位置。忽略 A、B二处的摩擦力。求平衡时 θ 与W、l、β、 FP 之间的关系式。
B
W FP A
θ
C
β
解: 1.受力分析 以AB杆为研究对象,其受 力图如图 2. 根据平衡条件确定θ角与W、l、 β、 FP之间的定量关系 注意:本题仅需确定θ角,无需求 解约束力,所以可以利用力矩 平衡方程求解θ角。但力矩中 心需选在FA和FB定量作用线的 交点D。
M O = ∑ M O ( Fi )
因为
FR′ = ( ∑ Fx ) 2 + (∑ Fy ) 2
M O = ∑ M O ( Fi )
⎧∑ Fx = 0 ⎪ ⎪ ⎨∑ Fy = 0 ⎪ ⎪ ⎩∑ M o = 0
平面任意力系的平衡方程
平面任意力系平衡的解析条件: (1)各力在两个任选坐标轴上投影的代数和 分别等于零。 (2)各力对于任意一点的矩的代数和也等于零。
解得:
FBA = −7.32kN
∑F
y
=0
FBC − F1 cos 30D − F2 cos 60D = 0
解得:
FBC = 27.3kN
二、平面力偶系的平衡条件
平面力偶系总可以简化为图示情形。 若F=0,则力偶系平衡,而力偶矩等于 零。 反之,若已知合力偶矩等于零,则 或是F=0或是d=0,无论哪种情况,该 力偶系均平衡。因此可得结论: 平面力偶系平衡的必要与充分条件是:力偶系中各力 偶矩的代数和等于零。即:
y
XA YA
A
α x B G P G Q
例
悬臂吊车如图示,横梁AB长l=2.5m;重量P=1.2kN; 拉杆CB倾斜角α=450,质量不计。载荷Q=7.5kN; 求图示位置a=2m时,拉杆的拉力和铰链A的约束反力。
其他形式方程的求解
C
∑X =0 G ∑m (F ) = 0
X A − T cos α = 0 l T sin α ⋅ l − P ⋅ − Qa = 0 A 2 G l m F = 0 Q ( l − a ) + P ⋅ − YA ⋅ l = 0 ∑ B 2 求解结果相同:
由几何关系可得
sin α = 0.6
解得:
FAx = −58N
FAy = −56N
FC = 70N
FAx = −58N
FAy = −56N
FC = 70N
以杆 DE 为研究对象,受力图和坐标系如图所示。建立 平衡方程 ∑ M E ( F ) = 0 : FDx × 0.2 + FC′ sin α × 0.08 = 0
不是两个独立的方程
∑ Fx = 0
∑ Fy = 0
平面平行力系的方程为两个,有两种形式
⎧∑ Fy = 0 ⎨ ⎩∑ M A = 0
⎧∑ M A = 0 ⎨ ⎩∑ M B = 0
各力不得与投影轴垂直
A, B 两点连线不得与各力平行
例 求:
尺寸如图; 已知: P 1 = 200kN, P 2 = 700kN, (1)起重机满载和空载时不翻倒,平衡载重P3; (2)P3=180kN,轨道AB给起重机轮子的约束力。
∑F
y
= 0:
′ cos α = 0 FDy − FC FDx = −16.8N
解得: FDy = 56N
例
G 已知: OA=R,AB= l, F , 不计物体自重与摩擦,
系统在图示位置平衡; 求: 力偶矩M 的大小,轴承O处的约束力, 连杆AB受力,冲头给导轨的侧压力。 解: 1)取冲头B,画受力图。
第三章
力系的平衡
第三章
力系的平衡
§3-1 平面力系的平衡条件与平衡方程 §3-2 简单的刚体系统平衡问题 §3-3 考虑摩擦时的平衡问题
§3-1 平面力系的平衡条件与平衡方程
一、平面汇交力系的平衡条件 多个汇交力的合成:
n K K FR = F1 + F2 + " + Fn = ∑ Fi i =1 K FR- 该平面汇交力系的合力
W FP A D
B
θ
C
β
β
B W θ
E FP FA A
FB
θ
C
β
解:
l cosθ cosθ + l sin θ = l ( + sin θ ) tan β tan β
W FP A D
B
θ
C
β
DA = DE + EA =
l M F DA W = × − × cosθ ∑ D P 2 l cosθ = FP × l ( + sin θ ) − W × cosθ tan β 2 W = [ FP (cot β + tan θ ) − ] l cosθ = 0 2
G 解: 空载时, FB = 0,
为不安全状况
∑M
A
=0
4P3max-2P2=0 F3max=350kN
解得
75kN ≤ P3 ≤ 350kN
(2)P3=180kN时:
2m 2m
A
y
∑M
∑F
=0
4 P3 − 2 P2 − 14 P1 + 4 FB = 0
解得 解得
FB=870kN FA=210kN
=0
C
2. 写平衡方程
∑X =0 ∑Y = 0
X A − T cos α = 0 YA − P − Q + T sin α = 0
A
l 2
G l T sin α ⋅ l − P ⋅ − Qa = 0 ∑ mA F = 0 2 3. 解平衡方程
( )
a
l
α G P
T
B
G Q
⎛ l ⎞ T = ⎜ P ⋅ + Qa ⎟ l ⋅ sin α = 13.2kN ⎝ 2 ⎠ YA = 2.1kN X A = T cos α = 11.43kN
A A
A
C
A
A
A
l 2
B
A
G ∑ mA F = 0 G ∑ mB F = 0 G ∑ mC F = 0
a
l
α G P
T
B
( ) ( ) ( )
l T sin α ⋅ l − P ⋅ − Qa = 0 2 l Q ( l − a ) + P ⋅ − YA ⋅ l = 0 X A 2 l X A tan α ⋅ l − P ⋅ − Q ⋅ a = 0 2
静定问题
静不定问题
静定问题
静不定问题 静定问题 :当系统中的未知量数目等于独立平衡方程的 数目时,则所有未知数都能由平衡方程求出。 静不定问题 :结构的未知量的数目多于平衡方程的数目, 未知量就不能全部由平衡方程求出。
刚体系的平衡
刚体系平衡
刚体系中每一个刚体或部分处于平衡
选择每个刚体为研究对象列出平衡方程或选择刚 体系或某部分为研究对象,列出平衡方程
l T sin α ⋅ l − P ⋅ − Qa = 0 2
XA
A
l 2( )a源自lα G PT
B
G Q
3. 解平衡方程
y
YA
A
⎛ l ⎞ T = ⎜ P ⋅ + Qa ⎟ l ⋅ sin α = 13.2kN ⎝ 2 ⎠
α x B G P G Q
例
悬臂吊车如图示,横梁AB长l=2.5m;重量P=1.2kN; 拉杆CB倾斜角α=450,质量不计。载荷Q=7.5kN; 求图示位置a=2m时,拉杆的拉力和铰链A的约束反力。
结论: 平面汇交力系合成的结果是一个合力,其大小和方 向由力多边形的封闭边来表示,其作用线通过各力的 汇交点。即合力等于各分力的矢量和(或几何和)。
平面汇交力系平衡的必要和充分条件是: 物体在平面汇交力系作用下,合力等于零。 即力多边形封闭(各力首尾连接)。 用矢量表示为: 物体上受有4个力 G F1
三矩式
⎧∑ M A = 0 ⎪ ⎨∑ M B = 0 ⎪∑ M = 0 ⎩ C
A, B, C 三个取矩点,不得共线
五、平面平行力系的平衡方程 各力的作用线都在同一平面内且互相平行的力系
∑F
x
≡0
0 + 0 + 0 +" = 0
F1 cos θ − F2 cos θ + F3 cos θ + " = 0 F1 sin θ − F2 sin θ + F3 sin θ + " = 0
解: 取起重机,画受力图。 G FA = 0, (1) 满载时, 为不安全状况
∑M
B
=0
P3 min ⋅ 8 + 2 P2 − 10 P1 = 0
解得
P3min=75kN
2m 2m 2m 2m
例3-5
尺寸如图; 已知: P 1 = 200kN, P 2 = 700kN,
求: (1)起重机满载和空载时不翻倒,平衡载重P3; (2)P3=180kN,轨道AB给起重机轮子的约束力。
解:以三角形平板 ABC 为研究对象,受力图和坐 标系如图所示。建立平衡方程