(第六讲)三维地震勘探分解
三维地震勘探方法原理与进展

三维地震勘探方法原理与进展1.震源激发:使用震源激发地震波。
常见的震源有人工震源(如重锤、炸药等)和自然地震。
2.地震波传播:地震波在地下沿不同路径传播,并与地下介质发生相互作用。
地震波的传播路径和传播速度取决于地下介质的物理特性,如弹性模量、密度等。
3.接收地震记录:在地震波传播的路径中,设置一系列地震接收器(通常是地震检波器或地震传感器),接收并记录地震波的到达时间、振幅等信息。
4.数据处理与分析:通过对接收到的地震记录进行数据处理和分析,可以得到地震波的传播速度、衰减特性等信息,并进一步推断地下介质的性质。
5.三维地震成像:将地震记录中的信息转化为地下模型,并进行三维地震成像。
常用的地震成像方法包括反演、偏移等。
1.高密度三维数据采集:随着数据采集技术的进步,三维地震勘探可以获得更高密度、更广范围的数据。
这使得勘探人员能够更准确地了解地下构造,并更好地定位资源。
2.多尺度体积建模:三维地震勘探方法逐渐从局部尺度向大范围尺度延伸。
除了对沉积盆地等大尺度地质问题的研究外,也在微观尺度上得到广泛应用,如岩石孔隙结构的研究。
3.三维地震反演技术:传统的地震成像方法主要基于地震波的走时信息,对地下结构的分辨率有限。
而三维地震反演技术可以利用地震波的振幅信息来改善地下结构的分辨率,进一步提高地震勘探的精度。
4.三维地震模拟方法:随着计算机技术的发展,三维地震模拟方法得到了广泛应用。
通过数值模拟地震波在地下的传播过程,可以更好地理解地震波和地下介质的相互作用,为地震勘探提供更准确的解释。
总之,三维地震勘探方法通过收集、处理和分析地震波传播信息来推断地下构造,并取得了显著的进展。
随着技术的进一步改进和计算机技术的不断发展,三维地震勘探将在未来的勘探开发中发挥更重要的作用,为石油、天然气等资源的开发提供更准确和可靠的地质信息。
三维地震
• 野外设计时,要考虑地震波的双程旅行 时或界面深度、界面倾角、速度及所需 频率。详细研究这四个参数有助于确定 时间及空间采样间隔及对三维测量成功 与否具有重要作用的覆盖次数及偏移距 的大小。现仅就几个重要参数的选择分 叙如下:
• 1.采样率的确定
• 在空间和时间上的采样密度应满足采样 定理。为保证所有意义反射的完整性, 在地下三个正交方向上的采样都必须保 证足够的密度。时间与空间上的采样率 应分别确定,这与二维的情况完全相似。
01(见图15.4)激发,以球面波方式向下传播。 碰到反射面后,根据惠更斯原理可把反射 界面上每一个点看做是一个新震源,从新 震源发出一系列小的球面波,向四面八方 传播开来。
• 对地面上某个接收点来说,它所接收的反 射波就是这一系列来自反射界面的波的总 和。于是,我们可以研究地下任意点P所产 生的波,在地面 的分布情况。
• 1)道间距的选择
• 根据采样定理,在无相干噪声的情况 下,检波点距应小于等于有意义的信号 的最小波长之半,
x
1 2
s
m
in
(7 3 6)
• 其中smin是最小信号的视波长(沿测线 方向的波长);x是可以选用的最大道距。
• 如果有明显的相干噪声存在,则对噪 声的采样必须保证不把噪声的假频引入 信号的频谱中来
• 下面举一模型实例说明二维地震技术不可 克服的缺陷,这就是有名的W.S.French三 维模型。
• 图为一个平台被一条断层分成的两 个断块。断面为一断层斜坡3,断层上盘有 两个紧靠在一起的穹隆构造1和2。平台上 布置13条测线。
图 7-1a 三维地震模型
• 图15.lb—ld是中的6测线应用不同 数据采集和处理方法所得到的结果。这 条测线从断层上盘开始,穿过穹隆1的顶 部,经过平坦部位,切过窟窿2右翼最低 点,最后与断层陡坡呈450交角进入断层 下盘。
三维地震勘探概述

第六章三维地震勘探技术
概述
第1节三维地震勘探优点
第2节三维地震资料采集
第3节三维地震资料处理
主讲教师:刘洋
第1节三维地震勘探优点
第6章
VSP 地面地震勘探
地面激发井中接收地面接收接收点激发点
(3)海上四分量地震勘探(单源—四分量)(4)陆上三分量地震勘探(单源—三分量)
模型示意图二维地震成果剖面三维地震成果剖面
第6章
二维资料作的构造等值线图三维资料作的构造等值线图
第6章
第2节三维地震资料采集
第6章
宽线弯线
十字线环形排列
章
常规正交线束砖墙式奇偶式非正交式
常用三维观测系统--束状观测系统
第6章
8线8炮观测系统
第3节三维地震资料处理
第6章
第六章总结
1.地震勘探的分类
2.三维地震勘探的优点
3.三维观测系统设计的要求
4.三维地震野外采集过程
第六章词汇
时移地震time-lapse seismic
三维地震3D seismic
三分量地震three-component seismic 三维三分量地震3D-3C seismic
面元bin
方位角azimuth。
三维地震勘探资料解释方法

褶曲在 三维 地震数据体 上 比较 容易识别 , 其在时 间剖面 上表现为反射波 同相轴 下 凹、 凸或扭 曲; 水平 等时切 片 上 在 上表现为反射波 同相轴 走 向发生弯 曲 , 曲率越 大 , 褶 曲越 则 紧闭 ; 曲率越小 , 则褶 曲越 开阔。
25 陷 落 柱 的 解释 .
层的地质层位 。
均错断时 , 断层 的倾 向和倾 角能 准确地得 到解 释 , 只要在垂 直断层走 向方 向切 剖面 , 面上 的 断层 线 即反映 出断 层倾 剖 向、 倾角 , 位的错断 即反 映出断层 的落差 。当只有 一个 同 层 相轴错断时 , 一方面 要按其 错断 位置判定 , 同时也要 考虑构 造规律 , 其倾角多属推断 。 () 5 断层解 释的审查 : 利用水平 等时切片检查 断层 组合 , 利用联 井剖面对地质层位及断层解 释成 果进行检查 。
场情况 的实 际分 析 , 决定在溜煤 眼上 口安设一套 自动式 挡风 漏斗 , 使其既能保证煤流 的顺利 人仓 , 又可实现 自动挡风。
1 自动 式 挡 风 漏 斗 的 工 作 原 理
1 一漏斗 2一挡风 板 5一动力 臂 3 一固 定 转 轴 4一防 护 挡煤 板 7 一重锤 8 限 位 装 置
断层的解释。
( ) 面的闭合 : 于在垂 直时 问剖面上 依据各 层位 断 2断 对 点确定的断层 面应 在各个方向的时问剖面上进 行闭合 , 以确 保断层位置的准确性 , 延展方 向的可靠性 。断面 闭合 是确定
断 层 空 间 位 置 的 重 要 一 步 , 经过 多次 反 复修 改 才 能 完 成 。 要
新 汶矿 业 集 团协 庄 煤矿 魏 国 王金 合
2 4 第1 0年 期 0
三维地震勘探方法原理与进展
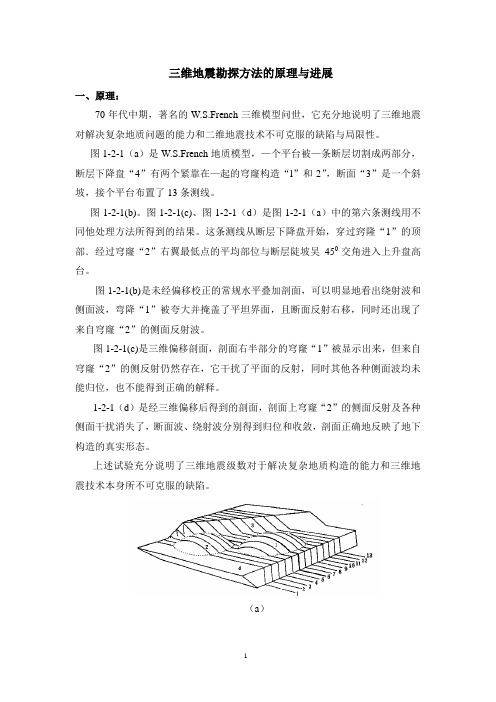
三维地震勘探方法的原理与进展一、原理:70年代中期,著名的W.S.French三维模型问世,它充分地说明了三维地震对解决复杂地质问题的能力和二维地震技术不可克服的缺陷与局限性。
图1-2-1(a)是W.S.French地质模型,—个平台被—条断层切割成两部分,断层下降盘“4”有两个紧靠在—起的穹窿构造“l”和2”,断面“3”是一个斜坡,接个平台布置了13条测线。
图1-2-1(b)。
图1-2-1(c)、图1-2-1(d)是图1-2-1(a)中的第六条测线用不同他处理方法所得到的结果。
这条测线从断层下降盘开始,穿过窍隆“1”的顶部.经过穹窿“2”右翼最低点的平均部位与断层陡坡吴450交角进入上升盘高台。
图1-2-1(b)是未经偏移校正的常规水平叠加剖面,可以明显地看出绕射波和侧面波,弯降“1”被夸大并掩盖了平坦界面,且断面反射右移,同时还出现了来自穹窿“2”的侧面反射波。
图1-2-1(c)是三维偏移剖面,剖面右半部分的穹窿“1”被显示出来,但来自穹窿“2”的侧反射仍然存在,它干扰了平面的反射,同时其他各种侧面波均未能归位,也不能得到正确的解释。
1-2-1(d)是经三维偏移后得到的剖面,剖面上穹窿“2”的侧面反射及各种侧面干扰消失了,断面波、绕射波分别得到归位和收敛,剖面正确地反映了地下构造的真实形态。
上述试验充分说明了三维地震级数对于解决复杂地质构造的能力和三维地震技术本身所不可克服的缺陷。
(a)(b)(c)(d)图1-2-1 W.S.French三维模型试验(a)三维地震模型;(b)原始记录;(c)三维偏移剖面;(d)三维偏移剖面当前三维地震勘探是用反射波法进行的。
二维反射波存在基本原理上有许多相似之处,二者所不同的是三维地震彩高密度的、各种形式的面积观测系统。
所以三维地地震又叫面积观测法,下面简单介绍面积观测系统的反射波时距图。
二、面积测量系统反射波时距图根据物理地震学的原理,地震波从泡点O激发后,以球面波方式向下传播,碰到反射界面后,根据惠更斯原理可以把反射界面上每一个点看作是一个新震源。
三维地震勘探方法原理与进展

三维地震勘探方法原理与进展三维地震勘探是一种利用地震波对地下结构进行成像的方法,它通过记录地震波在地下传播过程中的反射、折射和透射等现象,从而获取地下结构的信息。
与传统的二维地震勘探方法相比,三维地震勘探能够更全面、准确地描述地下构造,并且能够提供更高分辨率的成像结果。
三维地震勘探的原理是利用地震波在地下介质中的传播特性来推断地下结构。
地震波是由地震源产生的一种机械波,它可以在地下介质中传播,并且会遇到不同介质边界的反射、折射和透射等现象。
通过记录地震波的传播时间、振幅和频率等信息,可以建立地震波在地下介质中的传播模型,并通过反演等数学手段将地下结构成像。
1.设计地震勘探方案:根据勘探目标和地质条件,确定地震源和测量装置的部署方式。
常用的地震源包括重锤、震源车和炸药等,测量装置包括地震检波器。
2.采集地震数据:利用地震源激发地震波,在地下布置检波器,并记录地震波在地下传播的过程。
通常采集多个不同位置和方向的地震数据,以获取更完整、准确的地下信息。
3.数据处理:利用信号处理、地震波理论和数学模型等方法对采集到的地震数据进行处理。
这包括地震分析、波场模拟和成像等步骤,通过反演等数学手段将地震数据转化为地下结构信息。
4.地震成像:将处理后的地震数据进行可视化,生成三维地震成像结果。
地震成像方法包括卷积成像、叠前深度偏移和正演模拟等,这些方法可以提供高分辨率的地下结构图像。
1.采集技术的提升:随着测量设备和地震源的不断发展和更新,三维地震勘探的采集效率和数据质量得到了改善。
如引入宽频带地震源、多分量地震数据采集和大角度成像等技术,提高了地震数据的频率响应和波动物性分辨能力。
2.数值模拟方法的发展:为了改善地震数据的处理效果,科学家们对波场模拟方法进行了深入研究。
开发了高效且精确的波动方程求解方法,如有限差分法、有限元法和高阶边界条件法等,这些方法可以更准确地模拟地震波在地下的传播过程。
3.成像技术的提高:为了提高地震勘探的分辨率和准确度,研究人员发展了一系列的地震成像方法。
三维(3D)地震勘探 ppt课件
PPT课件
13
2)平行线型布置
PPT课件
14
3)积木型(又称斜交型)炮点线与接收点线彼此斜交
PPT课件
15
4)路线型(宽线剖面)
沿测线布置检波和炮点,可以得到测线附近条带上的反射资料。 宽线剖面处理后,能确定地下反射界面的位置、倾角和倾向, 分析波的来源,提高剖面信噪比。
PPT课件
16
2、不规则型观测系统
三维地震勘探资料的完整统一性及显示技术的现代化, 更便于人工联机解释。
PPT课件
8
三维地震野外数据采集
观测系统的设计原则 1.在一个共炮点道集式一个共CDP道集内地震道应均匀分布。即,炮点距、道 间距一般均匀分布,布保证同时勘探浅、中、深各目的层。即能取得各反射 层的有用反射波信息,又能用来进行速度分析。 2.在一CDP道集内各炮检距连线的方位方向应当尽可能比较均匀地分布在中心 点的CDP点360°的方位上。 3.地下各点的覆盖参数应尽可能相同,保证叠加参数相同。均匀的覆盖参数 是保证反射记录振幅均匀,频率均匀的前提,从而保证地震记录特征稳定, 便于岩性、岩相研究。
PPT课件
3
发达国家 中国
20世纪70年代开始使用 20世纪80年代迅速发展起来
野外资料采集→室内资料处理→成果解释
三维地震是将地震测网按一定规律布置成方格 状或环状的地震面积勘探方法。
PPT课件
4
三维地震勘探技术发展方向主要包括3方面:
一是发展万道地震采集技术。采用万道地震仪(测线在30000道以上)和数字
三维解释中所特有的功能。
PPT课件
30
用水平切片直接 做构造图。
PPT课件
31
5.彩色显示:三维资料
最新地震处理教程——第六章 三维地震勘探

第六章三维地震勘探6.1 引言在油气勘探中,重要的地下地质特征在性质上都是三维的。
例如盐岩刺穿、逆掩和褶皱带、大的不整合、礁和三角洲砂体沉积等。
二维地震剖面是三维地震响应的断面。
尽管二维剖面包含来自所有方向,包括该剖面平面以外方向传来的信号,二维偏移一般还是假定所有信号均来自该剖面自身所在平面内。
虽然有经验的地震解释人员往往可以识别出平面以外(侧面)的反射,这种信号往往还是会引起二维偏移剖面的不闭合。
这些不闭合是由于使用二维而不是三维偏移导致了不适当的地下成像所引起的。
另一方面,三维数据的三维偏移提供了适当的和详细的三维地下图像,使解释更为真实。
必须对三维测量设计和采集给予特别注意。
典型的海上三维测量是用比较密集的平行线完成的。
一种典型的陆上或浅水三维测量是由布设大量相互平行的接收测线,并在垂直方向上布设炮点(线束采集)完成的。
在海上三维测量中,放炮的方向(航迹)叫做纵测线方向;对于陆上三维测量,检波器的电缆是纵测线方向。
三维测量中与纵测线方向正交的方向叫做横测线方向。
与二维测量测线间距可达1km不同,三维测量的测线间隔可以是50m甚至更密些。
这种密度的覆盖要求精确地测出炮点和检波点的位置。
测量区域的大小是由地下目标层段的区域分布范围和该目标层段能充分成像所需的孔径大小所决定的、这种成像要求意味着三维测量的区域范围差不多总是大于目标的区域范围。
三维测量过程中一般要采集几十万至几百万个地震道,因为三维测量成本高,大部分都用于已发现的油气田的细测。
二维地震数据处理的基本原理仍适用于三维处理。
二维地震数据处理中,把道抽成共中心点(CMP)道集。
三维数据中按共面元抽道集。
这些道集用于速度分析并产生共面元叠加。
在线束采集中,共面元道集与CMP道集是一致的。
一般陆上测量面元为25m×25m,海上测量为12.5m×37.5m。
常规的三维观测系统往往使共面元道集中数据叠加的方式变得很复杂。
海上三维测量拖缆的羽状偏离可以导致共面元道集内的旅行时不再有简单的双曲时差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六讲
三维地震勘探
一、 三维地震数据的采集 二、三维速度分析 三、三维偏移归位处理 四、三维反射地震资料解释方法简介 4.1 三维反射地震资料显示 4.2 三维反射地震资料解释 4.3 三维地震资料人机交互解释
【思考题】
(1)三维观测系统类型有哪些? (2)如何确定可覆盖区域? (3)理解水平切片和垂直切片的概念。 (4) 理解等时切片与地震构造图的关系。
1. 三维观测系统的类型
(2)非平行线型观测系统
方型系统(Seisquare),环型系统(Seisloop)
一、 三维地震数据的采集
2. 三维观测系统参数的选择
(1) 网格间距
一、 三维地震数据的采集
(2) 覆盖次数的选择
(3)最大炮检距的选择
S
max
V
sin
rms
t f
0 max
一、 三维地震数据的采集
一、 三维地震数据的采集
1. 三维观测系统的类型
(1)平行线型观测系
炮点线
统
“十”字型系统(Cross System)
检波点线
“T”型、“L”型
一、 ቤተ መጻሕፍቲ ባይዱ维地震数据的采集
1. 三维观测系统的类型
“丰”字型(Swath)
一、 三维地震数据的采集
1. 三维观测系统的类型 多条平行线型
一、 三维地震数据的采集
(三)、三维静校正处理
1.野外静校正 三维静校正包括野外静校正和剩余静校 正,野外静校正是指对炮点和接收点的高程, 井口的时差校正和折射数据或初至波计算的 风化层低速带变化的时差校正。剩余静校正 是对地表引起的时差异常进行校正。
(三)、三维静校正处理
2.二维剩余静校正 在二维情况下,是剩余静校正由假设地下 一致的构造项、地表一致的震源和接收点校正 项、以及动校正剩余项组成,因此在地表一致 性假设条件下,各种地震资料处理软件中都有 许多剩余静校正模块。
Va Vs / 1 sin cos ( 0 )
2 2
叠加速度
地层倾角
炮检线的 方位角
界面倾向 的方位角
(二) 三维速度分析
3.建立三维速度模型
用三维数据分析得到的速度可建立三维速 度场。三维处理只有准确地建立三维速度场 , 后面的处理、解释才能保证精度。建立三维速 度场要合理,这也是一个难点。
(二) 三维速度分析 4.扇形分析技术
考虑一个 CDP 选排中象蜘蛛网似有炮检矢量分布。 将它划分成若干个扇形。划分的原则是不能太小, 太小会增加工作量,且造成一扇形内保持有数量 相近的道数。划分了扇形之后,将一个扇形内的 所有道组成一个虚二维共反射点道集,用标准的 二维速度分析方法计算速度,结果置于扇形的中 心方位。然后用最小平方拟合技术求出叠加速度 方位椭圆 ( 求最大叠加速度、最小叠加速度和椭 圆主轴方位角 ) 。为了完成椭圆的计算至少需要 划分三对扇 形。用虚二维CDP道集计算叠加速度 时可适当考虑加权问题。
(4)炮点距计算
一、 三维地震数据的采集
(5)组合
一、 三维地震数据的采集
3.数据采集面积的确定 勘探面积( Prospect Area ):用三维 偏移后的资料点覆盖起来的一片面积。 偏移孔径( Migration Apeture ):在 勘探面积的四边要各扩大一条以满足处理的 要求。
一、 三维地震数据的采集
(二)、三维速度分析
扇形分析技术
(二)、三维速度分析
图是同一个 CDP 点、二个不同扇形上合成道集动 校正的例了。 (a) 为原始道集; (b) 为用统一的一种 对各方位速度资料作了平均后的速度进行动校正的 结果,可以看到,在一个扇形道集上校正不足,在 另一个扇形道集上却校正过量;
(二)、三维速度分析
(二) 三维速度分析
1.二维叠加速度概念 在二维情况下,某条测线 t0 时刻的叠加 速度Vφ为
V Vr / cos
均方根速度
叠加速度
地层倾角
(二) 三维速度分析
2.三维叠加速度 在三维情况下,要考虑炮检线的方位。对同 一t0,不同炮检线方位角不同,叠加速度是不 同的,三维叠加速度可表示为
(1) 倾斜孔径(Dip Apeture) Xdip>=Z.sinψ (2) 绕射孔径(Diffractional Apeture)
二、三维地震勘探资料处理
(一)三维数据处理概述 1.三维数据特点 三维数据量很大,比二维要增加更多的数 据。地形测量数据量就是为三维地震勘探所进 行的陆上的各项地形测点工作和海上各项定位 工作的结果。对这些数据的处理工作主要是检: 查原始数据的可靠性,对数据进行编辑、校正、 滤波等,然后绘制测线分布图、炮点位置分布 图、检波点位置分布图、测区地形平面图、 CMP 点分布图、反射面元划分图、和覆盖次数 平面图等。
(一)三维数据处理概述 2.与二维处理相同与不同的处理内容
三维与二维处理有几个方面不一样,要研 制专门的三维数据处理软件,例如三维速度分 析、三维速度静校正、三维偏移等。
三维数据处理在许多方面与二维处理类似, 可以用二维处理的方法和软件经过修改来处 理,例如三维数据的增益恢复、滤波、反褶积、 初步速度分析,二维初叠加等,三维处理同样 需要利用 CMP 叠加来衰减多次波、提高信噪比, 也要作倾角校正 (DMO) 来消除反射点模糊效应。
(三)、三维静校正处理
3.三维剩余静校正 三维剩余静校正项除了有接收点校正项、 炮点校正项以外,还与构造项与倾角有关,剩 余动校正项与倾角、走向有关,因此有更多的 项,需要多道参与计算。多道的多参数的解, 要受到数学条件的约束,因此三维静校正的求 取是个难题,有多种方法求解,迭代法也是其 中的一种。 求出静校正量后要在面上平滑、平滑后再 作三维静校正。目前国内外都在研制三维静校 正方法和软件。
(c)为用各扇形上求出的速度值对扇形上各道校正 的结果。由于扇形道集内各道也不在同一方位,故 校正仍不是完全准确的,还有小的起伏。最后,用 拟合技术得到的各方位上速度分别进行校正,得到 (d)图用方位校正后速度函数动校正结果
(二)、三维速度分析
(c)为用各扇形上求出的速度值对扇形上各道校正 的结果。由于扇形道集内各道也不在同一方位,故 校正仍不是完全准确的,还有小的起伏。最后,用 拟合技术得到的各方位上速度分别进行校正,得到 (d)图用方位校正后速度函数动校正结果