最新《弹塑性力学》第七章 弹性力学平面问题的极坐标系解答
《弹塑性力学》第七章 弹性力学平面问题的极坐标系解答.ppt

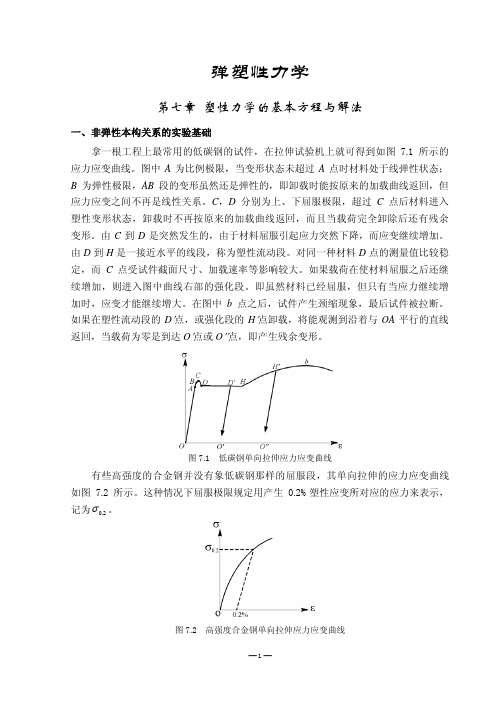
x
应力:r, ,r= r 应变:r, ,r= r
P
y
位移:u r , u
2020/10/9
3
§7-1平面极坐标下的基本公式
直角坐标与极坐标之间关系:
x=rcos, y=rsin
r cos sin
x r x x
r r
r sin cos
y r y y
r
r
2 r
r )( f r
r
f 1
r
fr 0 0 f
fr ) r
2= 2 1 1 2
r 2 r r r 2 2
力的边界条件如前所列。
2020/10/9
14
§7-1平面极坐标下的基本公式
1.8 应力函数解法
当体力为零 fr=f=0时, 应力法基本方程中的应
力分量可以转为一个待求的未知函数 ( r, ) 表示,而应力函数 ( r, ) 所满足方程为
16
§7-2 轴对称问题
2.1 轴对称问题的特点
1.截面的几何形状为圆环、圆盘。
2.受力和约束对称于中心轴,因此,可知体 积力分量 f=0 ; 在边界上 r=r0 :F 0, u (0 沿环向的受力和约束为零) 。
3.导致物体应力、应变和位移分布也是轴 对称的:
2020/10/9
17
§7-2 轴对称问题
上式代入平衡微分方程可得到用位移表 示的平衡微分方程,即位移法的基本方程。
r
r
1 r r
( r
r
)
Kr
0
r
r
1 r
2 r
r
K
0
力的边界条件也同样可以用位移表示。
2020/10/9
弹塑性力学 第07章平面问题的极坐标解答

ϕ 改变,即与 ϕ 无关。由此可见,凡是轴
对称问题,总是使自变称的 物理量不能存在。
考擦应力函数 U 与 ϕ 无关的一种特殊情况,即轴对称, 此时极坐标形式的双调和方程变成常微分方程 ⎛ ∂2 1 ∂ 1 ∂ 2 ⎞⎛ ∂ 2U 1 ∂U 1 ∂ 2U ⎞ ⎜ ⎜ ∂ρ 2 + ρ ∂ρ + ρ 2 ∂ϕ 2 ⎟ ⎟⎜ ⎜ ∂ρ 2 + ρ ∂ρ + ρ 2 ∂ϕ 2 ⎟ ⎟=0 ⎝ ⎠⎝ ⎠ ⎛ d2 1 d ⎞⎛ d 2U 1 dU ⎞ ⎜ ⎜ d ρ 2 + ρ dρ ⎟ ⎟⎜ ⎜ dρ 2 + ρ dρ ⎟ ⎟=0 ⎝ ⎠⎝ ⎠
τ ρϕ = τ ϕρ
∂ ⎛ 1 ∂U ⎞ 1 ∂ 2U 1 ∂U ⎜ ⎟ =− + 2 =− ⎜ ∂ρ ⎝ ρ ∂ϕ ⎟ ρ ∂ρ∂ϕ ρ ∂ϕ ⎠
¾极坐标系中边界条件的处理: ①、对于由径向线和环向线所围成的弹性体,其边界面通常 均为坐标面,即ρ 面(ρ 为常数)和 ϕ 面(ϕ 为常数),使 边界的表示变得十分简单,所以边界条件也十分简单。 ②、对于应力边界条件,通常给定径向和切向面力值,可直 接与对应的应力分量建立等式(注意符号规定) 应力边界条件:
¾平面问题极坐标形式的几何方程
ερ =
∂u ρ
∂ρ u ρ 1 ∂uϕ εϕ = + ρ ρ ∂ϕ 1 ∂u ρ ∂uϕ uϕ + − γ ρϕ = ρ ∂ϕ ∂ρ ρ
平 面 应 变 问 题
⎧ 1 ⎪ε ρ = (σ ρ −ν 1σ ϕ ) E1 ⎪ ⎪ 1 ⎨ε ϕ = (σ ϕ −ν 1σ ρ ) E1 ⎪ ⎪ 2(1 +ν 1 ) γ τ ρϕ = ⎪ ρϕ E1 ⎩
¾平面问题极坐标形式的物理方程 平 面 应 力 问 题
弹塑性_塑性力学基本方程和解法
在加载过程中物体各点处的偏应力分量 sij 保持比例不变。在工程允许精度下,也可推
广应用于稍为偏离简单加载的情况。
以上各种理论中涉及的一些假设,例如:塑性应变偏量的增在单一的函数关系等假设,都得到了常用金属材
料大量试验的验证。
z 强化规律 对于理想弹塑性材料,材料一旦屈服,其应力状态点在主应力空间中就落在屈服
变形, Hα 也不变,于是
∂f ∂σ ij
除等向强化外,有些强化材料表现为随动强化(图 7.7b),即,在强化过程中,屈
服面的大小和形状保持不变,只随塑性变形的发展而在应力空间中平移。还有些材料
在强化过程中随动强化与等向强化同时发生,称为混合强化。
由于在应力和强化参数空间中,表示应力状态的应力点只可能位于后继屈服面
(或加载面)上或其内,不可能位于曲面之外,若加载面是一个正则曲面,则有
⎯2⎯
研究生学位课弹塑性力学电子讲义
姚振汉
⎧ε = 0 ⎨⎩σ = σ s
当 σ <σs 当 ε >0
(2)
图 7.5 理想弹塑性和刚塑性
当考虑材料强化性质时,可在理想弹塑性模型的基础上加以改进,采用线性强化 弹塑性模型来近似:
⎧σ = Eε
⎨⎩σ = σ s +E1 (ε − εs )
当 ε ≤εs 当 ε >εs
(5)
⎯3⎯
第七章 塑性力学的基本方程与解法
其中 k 可由单向拉伸或其它材料试验测得的σ s 确定, k = σ s 2 。当不能确定主应力的 排序时,在以三个主应力为坐标轴的应力空间中,由特雷斯卡条件所包围的弹性状态 的应力空间为
σ1 −σ 2 ≤ 2k, σ 2 −σ 3 ≤ 2k, σ 3 −σ1 ≤ 2k
弹性力学直角坐标解答

根据材料的本构关系, 引入物理方程来表达应 力分量与应变分量之间 的关系。
针对具体问题的边界条 件,如固定端、自由端 或受力边界等,对平衡 方程和几何方程进行适 当的处理。
根据问题的性质和复杂 程度,选择合适的求解 方法,如分离变量法、 积分变换法或数值方法 等,以求解平衡方程和 几何方程,得到应力分 量和位移分量的解答。
多场耦合问题
涉及多个物理场的相互作用,如热-力、电-力等耦 合问题,使得边界条件更加复杂。
处理复杂边界条件方法
坐标变换法
通过坐标变换将复杂边界转换为简单边界,从而简化问题的求解。
近似解法
采用近似函数逼近复杂边界条件,将问题转化为可求解的近似问题。
数值解法
利用数值计算方法(如有限元法、有限差分法等)对复杂边界条件 进行离散化处理,进而求解弹性力学问题。
直角坐标系下应力应变关系
应力分量
在直角坐标系下,一点的应力状态可以用六个应力分量来 表示,即三个正应力分量和三个剪应力分量。
应变分量
与应力分量相对应,一点的应变状态也可以用六个应变分 量来表示,即三个正应变分量和三个剪应变分量。
应力应变关系
在弹性力学中,应力和应变之间存在一定的关系,这种关 系可以用广义胡克定律来描述。对于各向同性材料,应力 应变关系可以简化为三个独立的方程。
03
空间问题直角坐标解答方 法
空间应力问题求解思路
应力分量求解
叠加原理应用
根据弹性力学基本方程,利用直角坐标 系下的应力分量表达式,通过给定的边 界条件和载荷,求解各应力分量。
对于多个载荷同时作用的情况,可利用 叠加原理将问题分解为多个简单问题分 别求解,再将结果叠加得到最终解。
应力函数引入
第七章弹塑性断裂力学简介详解

; xy =0
5
sx =s y =s
a 2r
=
K1
2p r
; xy =0
对于平面问题,还有: yz=zx=0;
sz=0 sz=(sx+sy)
则裂纹线上任一点的主应力为:
平面应力 平面应变
s1 =s 2 =
K1
2p r
;
s3=20 K1/
2p r
平面应力 平面应变
塑性力学中,von Mises屈服条件为:
sys
B A
假定材料为弹性-理想塑性,
D K
屈服区内应力恒为sys,应力分
o rp
x
布应由实线AB与虚线BK表示。 a
与原线弹性解(虚线HK) 相比较,少了HB部分大 于sys的应力。
8
TAhBeHs区im域pl表e a示na弹ly性sis材as料ab中o存ve在is
sy H
n的ot力st,ric但tl因y c为or应re力ct 不be能cau超se过it屈was
(s1 -s 2 )2 + (s 2 - s 3 )2 + (s 3- s1)2=2 sy2s
6
将各主应力代入Mises屈服条件,得到:
K1 / 2p rp = s ys (1- 2)K1/ 2prp = s ys
(平面应力) (平面应变)
故塑性屈服区尺寸rp为:
rp=
1 2p
(
sKy1s)2
rp = 21p(sKy1s)2(1-2)2
线弹性断裂力学给出的裂纹尖端附近的应力趋于 无穷大。然而,事实上任何实际工程材料,都不 可能承受无穷大的应力作用。因此,裂尖附近的 材料必然要进入塑性,发生屈服。
2
弹塑性力学第七章答案

第七章 习题答案7.3 设123S S S 、、为应力偏量,试证明用应力偏量表示Mises 屈服条件时,其形式为:s σ= 证明:Mises 屈服条件为()()()22221223312s σσσσσσσ-+-+-=()()()()()()2221223312221231223312222123123231222S S S S S S S S S S S S S S S S S S S S S =-+-+-=++---⎡⎤=++-++⎢⎥⎣⎦左式()1232222123032s S S S S S S σ++=∴=++= 左式故有s σ= 7.4 试用应力张量不变量1J 和2J 表示Mises 屈服条件。
解:1123J σσσ=++ ()2122331J σσσσσσ=-++Mises 屈服条件:()()()22221223312s σσσσσσσ-+-+-=()()()()22212312233121221223312212223232s J J σσσσσσσσσσσσσσσσσσσ=++---⎡⎤=++-++⎣⎦=+=左式 故有 22123s J J σ+= 7.5 试用Lode 应力参数σμ表达Mises 屈服条件。
解:由定义:8max ττ======即()()1313312σσσσ=-- Mises 屈服条件为()()()22221223312s σσσσσσσ-+-+-=将上式代入,得:()13sσσσ-= 即:13s σσσ-=7.6 物体中某点的应力状态为21000002000/00300MN m -⎡⎤⎢⎥-⎢⎥⎢⎥-⎣⎦,该物体在单向拉伸 时2190/s MN m σ=,试用Mises 和Tresca 屈服条件分别判断该点是处于弹性状态还是塑性状态,如主应力方向均作相反的改变(即同值异号),则对被研究点所处状态的判断有无变化?解:(1)Mises 屈服条件判断()()()()()22242122331242610/7.2210/sMN m MN mσσσσσσσ-+-+-=⨯=⨯故该点处于弹性状态 (2)Tresca 屈服条件判断213200/MN m σσ-=故该点处于塑性状态如果各应力均作为变号,则以上各式不变,所作判断没有变化。
弹塑性力学第7章—平面问题

2 2 2 ε γ xy ∂ ∂ ε ∂ y 应变协调方程: x + = 2 2 ∂y ∂x ∂y∂x
用应力表示应变,结合平衡方程,可得
⎛ ∂2 ∂2 ⎞ 1 ⎛ ∂Fbx ∂Fby ⎞ ⎜ ∂ 2 + ∂ 2 ⎟ (σ x + σ y ) = − − ⎜ ∂ + ∂ ⎟ x ⎠ 1 v⎝ x y ⎠ ⎝ y
本构方程 :
7.1 平面问题的基本方程
7.1.1 平面应力问题
应变协调方程: ∂ ε x + 2 = 2 ∂y ∂x ∂y∂x
2
∂ 2ε y
∂ 2γ xy
用应力表示应变,结合平衡方程,可得
⎛ ∂2 ⎛ ∂Fbx ∂Fby ⎞ ∂2 ⎞ ⎜ ⎜ ∂x + ∂y ⎟ ⎟ ⎜ ∂y 2 + ∂x 2 ⎟ ⎟(σ x + σ y ) = −(1 + v )⎜ ⎝ ⎠ ⎝ ⎠
7.1 平面问题的基本方程
7.1.2 平面应力问题
本构方程 :
1 ⎤=0 εz = ⎡ σ v σ σ − + 由 ( ) z x y ⎦ E⎣
可得
σ z = v (σ x + σ y )
代入一般情况下的广义胡克定律,得到
E v , v1 = 其中 E1 = 2 1− v 1− v
τ xy ⎫ 1 ε x = (σ x − v1σ y ) γ xy = ⎪ E1 G ⎪ ⎪ 1 ε y = (σ y − v1σ x ) γ yz = 0 ⎬ E1 ⎪ εz = 0 γ zx = 0 ⎪ ⎪ ⎭
f1 = C2 x3 + C3 x 2 + C4 x + C5
f 2 = C6 x3 + C7 x 2 + C8 x + C9
弹塑性力学课程作业 参考答案

弹塑性力学课程作业1 参考答案一.问答题1. 答:请参见教材第一章。
2. 答:弹塑性力学的研究对象比材料力学的研究对象更为广泛,是几何尺寸和形态都不受任何 限制的物体。
导致这一结果的主要原因是两者研究问题的基本方法的不同。
3. 答:弹塑性力学与材料力学、结构力学是否同属固体力学的范畴,它们各自求解的主要问题都是变形问题,求解主要问题的基本思路也是相同的。
这一基本思路的主线是:(1)静 力平衡的受力分析;(2)几何变形协调条件的分析;(3)受力与变形间的物理关系分析; 4. 答:“假设固体材料是连续介质”是固体力学的一条最基本假设,提出这一基本假设得意义是为利用数学中的单值连续函数描述力学量(应力、应变和位移)提供理论依据。
5. 答:请参见本章教材。
6. 答:略(参见本章教材)7. 答:因为物体内一点某微截面上的正应力分量 σ 和剪应力分量τ 同材料的强度分析 问题直接相关,该点微截面上的全应力则不然。
8. 答:参照坐标系围绕一点截取单元体表明一点的应力状态,对单元体的几何形状并不做 特定的限制。
根据单元体所受力系的平衡的原理研究一点的应力状态。
研究它的目的是: 首先是了解一点的应力状态任意斜截面上的应力,进一步了解该点的主应力、主方向、 最大(最小)剪应力及其作用截面的方位,最终目的是为了分析解决材料的强度问题。
9.答:略(请参见教材和本章重难点剖析。
) 10. 答:略(请参见教材和本章重难点剖析。
)11. 答:略(请参见教材和本章重难点剖析。
) 这样分解的力学意义是更有利于研究材料的塑性变形行为。
12. 答:略(请参见教材和本章重难点剖析。
)纳唯叶 (Navier) 平衡微分方程的力学意义是:只有满足该方程的应力解和体力才是客观上可能存在的。
13. 答:弹塑性力学关于应力分量和体力分量、面力分量的符号规则是不一样的。
它们的区别请参见教材。
14、答:弹塑性力学的应力解在物体内部应满足平衡微分方程和相容方程(关于相容方程详见第3、5、6章),在物体的边界上应满足应力边界条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6. 按应力法解
16.02.2021
26
§7-2 轴对称问题
应力法基本方程
dr
dr
r
r
fr
0
2(r
)
(1)(dfr
dr
fr r
)平面应力问
16.02.2021
27
§7-2 轴对称问题
其中
2=ddr22
1 r
d dr
边界条件为力的边界条件:
r Fr
(在
s
上) )
16.02.2021
28
§7-2 轴对称问题
)( fx
x
f y y
)
其中
2=x22
2 y2
16.02.2021
13
§7-1平面极坐标下的基本公式
在极坐标按应力求解的基本方程为 (平面应力问题)
其中
r 1
r r
r
r
2(r )
r
r
r
fr
0
1 r
2r
r
f
0
(1)(fr 1 f r r
fr r
)
2= r22 1 rrr12 22
2.受力和约束对称于中心轴,因此,可知体 积力分量 f=0 ; 在边界上 r=r0 :F 0, u (0 沿环向的受力和约束为零) 。
3.导致物体应力、应变和位移分布也是轴 对称的:
16.02.2021
17
§7-2 轴对称问题
在V内 u=0,r=0,r=0, ur=ur(r), r=r(r), = (r), r=r (r), = (r) 。
《弹塑性力学》第七章 弹 性力学平面问题的极坐标系
解答
在平面问题中,有些物体的截面几何形状 (边界)为圆形、扇形,对于这类形状的物
体采用极坐标 (r,) 来解,因为此时边界条件
用极坐标易描述、简便。本章将讨论采用极 坐标求解平面问题一些基本方程和解法以及 算例。
16.02.2021
2
§7-1平面极坐标下的基本公式
7.按应力函数求解
当无体力时应力法基本方程为:
d r
dr
r
r
0
2 ( r ) 0
选取应力函数 = (r)——单变量的函数
1.6 按位移法求解
1 E 2 (r) 1 E 2 ( 1 r u u r r u r r)
r 2 (1 E )r 2 (1 E )(1 r u r u r u r )
16.02.2021
11
§7-1平面极坐标下的基本公式
上式代入平衡微分方程可得到用位移表 示的平衡微分方程,即位移法的基本方程。
各待求函数为r的函数(单变量的)
16.02.2021
18
§7-2 轴对称问题
2.2 轴对称平面问题的基本公式
1. 平面微分方程 (仅一个):
dr
r
r
r
fr
0
2. 几何方程(二个):
r
du r dr
ur r
16.02.2021
19
§7-2 轴对称问题
3.变形协调方程(一个):
r 1 2 22 r 1 r r 2 2(r) r 1 2 r 2(rr ) 1 r r r 0
23
§7-2 轴对称问题
5. 按位移法求解
位移法的基本方程为:
r
E (druur) 12 dr r
1E2(urr
dru)
dr
d d2u 2rr1 rd dru ru r2 r (1 E 2)fr 0
d dr1 rd d(rrru)(1 E 2)fr 0
16.02.2021
24
§7-2 轴对称问题
16.02.2021
9
§7-1平面极坐标下的基本公式
1.6 按位移法求解 基本未知函数为位移u r , u ,应变、应力
均由位移导出。平面应力问题时的应力由位移 表示:
r 1 E 2(r) 1 E 2 u r r(1 r u u r r)
16.02.2021
10
§7-1平面极坐标下的基本公式
1.5 边界 条 件
r c n o ,r ) s r c ( n o ,s ) K s r F ( r(在
r cn o ,r ) s r c(n o ,s ) K s ( F
s
上
)
环向边界
n /r /:r K r ,r K (r=r0)
径向边界 n /s ( /n r ):θ rK r , K ( =0 )
16.02.2021
15
§7-1平面极坐标下的基本公式
而极坐标系下的应力分量r ,,,r 由 ( r, )
的微分求得, 即:
r
1 r2
2 2
1
r r
2
r 2
rr r(1 r )r1 2 1 r r2
16.02.2021
16
§7-2 轴对称问题
2.1 轴对称问题的特点
1.截面的几何形状为圆环、圆盘。
相应边界条件:轴对称问题边界 r=r0(常数)
位移边界条件: ur ur(在 su 上)
力的边界条件:r Fr(在 s 上)
平面应力问题的力边界条件用位移表示:
16.02.2021
25
§7-2 轴对称问题
12
E
(ddrururr)Fr(在
s
上)
当ur 由基本方程和相应边界条件求出后,则 相应应变、应力均可求出。
1 rdd22r(r)1 rddrr0
ddr(r)—r —变形协调方程
16.02.2021
20
§7-2 轴对称问题
3.变形协调方程(一个):
ddr(r)r ——变形协调方程
由几何方程:
r ur ddr(r)ddurrr
或
d r
dr r
16.02.2021
21
§7-2 轴对称问题
4.物理方程(两个) 平面应力问题
rr1 r r(r r)K r0
rr1 r 2rrK 0
力的边界条件也同样可以用位移表示。
16.02.2021
12
§7-1平面极坐标下的基本公式
1.7 按应力法求解
在直角坐标
系中按应力求解 的基本方程为
(平面应力问题) 2 (
x
x
x
xy
x
y
xy
y
y
y
) (1
fx 0 fy 0
r E1(r ) E1( r)
或
r
E
12
(r
)
பைடு நூலகம்
E
12
(
r)
平面应变问题时弹性系数替换。
16.02.2021
22
§7-2 轴对称问题
5. 按位移法求解
将 r、 用ur 表示,并代入平衡微分方程,
对于平面应力问题
r
E (druur) 12 dr r
E (ur
12 r
dru)
dr
16.02.2021
力的边界条件如前所列。
16.02.2021
14
§7-1平面极坐标下的基本公式
1.8 应力函数解法
当体力为零 fr=f=0时, 应力法基本方程中的应
力分量可以转为一个待求的未知函数 ( r, ) 表示,而应力函数 ( r, ) 所满足方程为
4 ( r, ) = 0 或
(r221 rrr1222)20