微程序控制单元实验
计算机组成原理微程序控制单元实验

计算机组成原理微程序控制单元实验## 微程序控制单元实验### 简介微程序控制单元(Microprogram Control Unit)是计算机组成原理中的一个重要概念。
它是一种基于微指令的控制方式,有效地解决了指令复杂度高、设计难度大的问题。
本篇文档将介绍微程序控制单元的实验原理和方法。
### 实验目的通过本次实验,我们将能够深入了解微程序控制单元的工作原理,理解微程序控制单元在计算机系统中的重要性,并通过实践掌握微程序的设计与编写。
### 实验内容1. 将微指令存储器的内容读入到微程序存储器中;2. 设计微指令的控制信号;3. 实现微程序控制单元的功能;4. 编写测试程序,验证微程序控制单元的正确性。
### 实验步骤#### 第一步:读取微指令存储器内容将微指令存储器中已经设计好的微指令读入到微程序存储器中。
这一步骤可以使用硬件开关、编程方式或者仿真软件进行。
#### 第二步:设计微指令的控制信号根据实验需求,设计微指令的控制信号。
微指令的控制信号包括指令码、操作码、地址码等等,根据具体的实验需求而定。
#### 第三步:实现微程序控制单元的功能将设计好的微指令的控制信号与微程序控制单元进行连接。
确保微程序控制单元能够正确地根据微指令的控制信号来执行相应的操作。
#### 第四步:编写测试程序编写测试程序,验证微程序控制单元的正确性。
测试程序需要覆盖到微程序控制单元的各个功能模块,包含不同类型的指令和操作,以确保微程序控制单元的完整性和鲁棒性。
#### 第五步:测试与调试将编写好的测试程序加载到微程序控制单元中,进行测试和调试。
通过观察微程序控制单元的输出结果,排查可能存在的问题并进行修正,以保证其正确性和稳定性。
### 实验总结通过本次实验,我们深入了解了微程序控制单元的工作原理,并通过实践掌握了微程序的设计与编写。
微程序控制单元的应用可以提高计算机系统的灵活性和可扩展性,同时也降低了整个系统的复杂度和设计难度。
计算机组成原理微程序控制单元实验

计算机组成原理微程序控制单元实验
微程序控制单元是计算机组成原理中的一个重要组成部分,其工作原理是将指令分解成一系列的微操作,然后发出各种控制命令,执行微操作系列,从而完成一条指令的执行。
以下是一个微程序控制单元的实验流程:
1. 提取指令:从存储器或高速缓冲存储器中取出指令,放入指令寄存器,并对指令译码。
提取指令之后,程序计数器根据指令长度增加存储器单元。
2. 解码:根据 CPU 的指令集架构 (ISA) 定义将数值解译为指令。
解码阶段将指令分解成一系列的微操作。
3. 控制命令发出:根据指令中的微操作,发出各种控制命令,例如读写控制、存储器选择、微操作执行等。
这些控制命令用于执行微操作系列。
4. 执行微操作:根据控制命令,执行微操作系列。
微操作通常是一些小规模的运算,例如存储器读写、算术运算等。
这些微操作被分解成一系列的微操作,然后由微程序控制单元执行。
5. 写回结果:完成微操作系列后,将结果写回到存储器或高速缓冲存储器中。
6. 跳转:如果需要,可以通过跳转指令来跳转到其他指令执行。
7. 重复:如果指令需要多次执行,可以通过重复指令来实现。
通过以上步骤,微程序控制单元可以实现对计算机指令的控制,从而实现计算机的功能。
值得注意的是,微程序控制单元是计算机组
成原理中的一个抽象概念,实际上并不存在具体的硬件实现。
实验六微程序控制单元实验
实验六 微程序控制单元实验一、实验目的1. 熟悉微程序控制器的工作原理。
2. 掌握微程序编制及微指令格式。
二、实验要求按照实验步骤完成实验项目,熟悉微程序的编制、写入、观察运行状态。
三、实验原理⒈ 微程序控制电路微程序控制器的组成见图6-1,其中控制存储器采用4片6116静态存储器 ,微命令寄存器32位,用三片8D 触发器(273)和一片4D(175)触发器组成。
微地址寄存器6位,用三片正沿触发的双D 触发器(74)组成,它们带有清零端和置位端。
在不判别测试的情况下,T2时刻打入微地址寄存器的内容即为下一条微指令地址。
当T4时刻进行测试判别时,转移逻辑满足条件后输出的负脉冲通过置位端将某一触发器输出端置为“1”状态,完成地址修改。
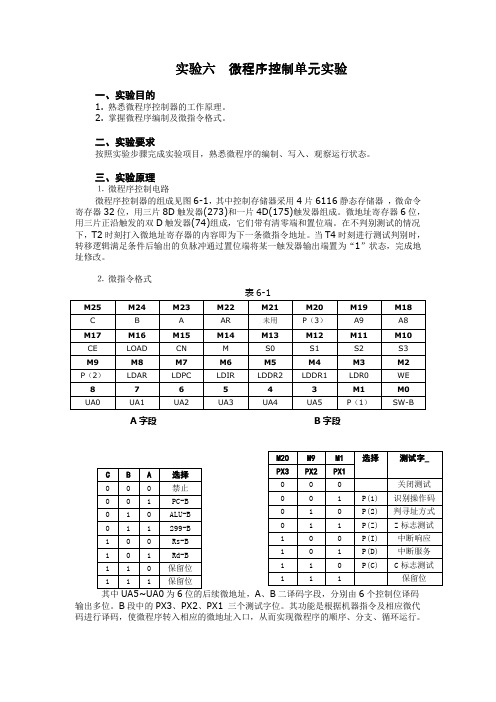
⒉ 微指令格式表6-1A 字段B 字段A 、B 二译码字段,分别由6个控制位译码输出多位。
B 段中的PX3、PX2、PX1 三个测试字位。
其功能是根据机器指令及相应微代码进行译码,使微程序转入相应的微地址入口,从而实现微程序的顺序、分支、循环运行。
⒊微程序流程与代码图6-2为几条机器指令对应的参考微程序流程图,将全部微程序按微指令格式变成二进制代码,可得到模型机(一)所例举的8位指令代码。
图6-2微程序流程图四、实验内容(一)微程序的编写为了解决微程序的编写,本装置设有微程序读写命令键,学生可根据微地址和微指令格式将微指令代码以快捷方式写入到微程序控制单元。
具体的操作方法是按动位于本实验装置右中则的红色复位按钮使系统进入初始待令状态。
再按动【增址】命令键使工作方式提示位显示“H”。
微程序存贮器读写的状态标志是:显示器上显示8个数字,左边1、2位显示实验装置的当前状态,左边3、4位显示区域号(区域的分配见表7-2),左边5、6位数字是微存贮单元地址,硬件定义的微地址线是ua0~ua5共6根,因此它的可寻址范围为00H~3FH;右边2位数字是该单元的微程序,光标在第7位与第8位之间,表示等待修改单元内容。
计算机组成原理微程序控制单元实验报告

姓名学号班级******************年级指导教师《计算机组成原理》实验报告实验名称微程序控制单元实验、指令部件模块实验、时序与启停实验实验室实验日期实验七微程序控制单元实验一、实验目的⒈ 掌握时序产生器的组成方式。
⒉ 熟悉微程序控制器的原理。
⒊ 掌握微程序编制及微指令格式。
二、实验原理图7-7-1图 7-7-4 微地址控制原理图微程序控制单元实验原理就是人为的给出一条微指令的地址,人为的去打开测试开关,观察机器怎么运行,打个比方就是我要你执行我下的某条命令,我先告诉你命令写在哪页纸上,你找到纸后,分析命令是什么之后再去执行。
观察机器微程序控制器的组成见图7-1-1 ,微地址的打入操作就是由操作者给出一条微指令的地址(同上面的例子就是仅仅告诉你我让你跑的这条命令写在哪页纸上,而没有告诉你命令的具体内容),不需要做测试去判断这是什么指令,所以由图7-7-1 ,其中微命令寄存器 32 位,用三片 8D 触发器 (273) 和一片 4D(175) 触发器组成。
它们的清零端由CLR来控制微控制器的清零。
它们的触发端CK接 T2,不做测试时 T2 发出时钟信号,将微程序的内容打入微控制寄存器(含下一条微指令地址)。
打入了微指令的地址(即告诉你命令在哪页纸上,此时你需要先找到这页纸并判断命令是叫你做什么,然后执行),进行测试,T4 发出时钟信号,转移逻辑满足条件后输出的负脉冲通过置位端将某一触发器输出端置为“1”状态,按图 7-7-4 所示,微地址锁存器的置位端R 受 SE5~SE0控制,当测试信号 SE5~SE0输出负脉冲时,通过锁存器置位端R将某一锁存器的输出端强行置“1”,实现微地址的修改与转移,此时的地址指的是指令的操作码的地址(即你已经知道命令是跑,此时做的是跑的行为)。
再由数据开关置入微地址的值,再做测试,再跳到指令的操作码的地址准备开始执行指令,这就是微程序控制单元实验的原理。
三、实验连线连接图或“图 7-2-27-2-2 中的 B1、 B7、 B10、 B15,用双头实验导线连接上图中所有标明“”图案的插孔(注:Dais-CMH 的时钟信号以作内部连接)。
微程序控制器实验报告

微程序控制器实验报告微程序控制器实验报告引言微程序控制器是一种常见的计算机控制器,它采用微程序的方式来实现指令的执行。
在本次实验中,我们将学习和探索微程序控制器的工作原理,并通过实验验证其功能和性能。
实验目的本次实验的主要目的是通过设计和实现一个简单的微程序控制器,来深入理解微程序控制器的工作原理和原理图设计。
实验过程1. 设计微指令集在设计微程序控制器之前,首先需要确定微指令集。
微指令集是由一系列微指令组成的,每个微指令对应一个控制信号,用于控制计算机的各个组件的操作。
在本次实验中,我们选择了常见的微指令集,包括存储器读写、算术逻辑运算、数据传输等指令。
2. 设计微指令控制存储器微指令控制存储器是微程序控制器的核心组件,用于存储微指令集。
在本次实验中,我们使用了静态随机存储器(SRAM)来实现微指令控制存储器。
通过将微指令集编码为二进制数,并将其存储在SRAM中的不同地址位置,实现对微指令的存储和读取。
3. 设计微指令解码器微指令解码器用于解析微指令,并产生相应的控制信号。
在本次实验中,我们使用了组合逻辑电路来实现微指令解码器。
通过将微指令的不同位与控制信号相连,实现对微指令的解码和控制信号的生成。
4. 设计微程序计数器微程序计数器用于控制微程序的执行顺序。
在本次实验中,我们使用了计数器和触发器来实现微程序计数器。
通过将微程序计数器的输出与微指令控制存储器的地址输入相连,实现对微指令的顺序读取。
实验结果通过实验,我们成功设计并实现了一个简单的微程序控制器。
在实验中,我们编写了微指令集,并将其存储在微指令控制存储器中。
通过微指令解码器和微程序计数器的协作,我们成功实现了对微指令的解码和执行。
实验结果表明,微程序控制器能够准确地控制计算机的各个组件的操作,并实现指令的执行。
实验总结通过本次实验,我们深入了解了微程序控制器的工作原理和原理图设计。
微程序控制器作为一种常见的计算机控制器,具有灵活性和可扩展性。
实验五 微程序控制实验

实验五微程序控制实验一、实验目的1、掌握微程序控制器的组成原理;2、为模型机定义五条机器指令,并编写相应的微程序;3、掌握微程序的编制、写入,观察微程序的运行。
二、实验设备TDN-CM+计算机组成原理教学实验箱一台,排线若干三、实验原理实验所用的半导体静态存储器电路可产生4个等间隔的时序信号TS1—TS4,其中Ø为时钟信号,由实验台左上方的方波信号源提供,可产生频率及脉宽可调的方波信号。
学生可根据实验自行选择方波信号源的频率及脉宽。
为了便于控制程序的运行,时序电路发生器也设置了一个启停控制触发器Cr,使TS1—TS4信号输出可控。
STEP(单步)STOP(停机)分别来自实验板上方中部的两个二进制开关STEP、STOP的模拟信号。
START建是来自实验板上方中部的一个微动开关,当START的按键信号STEP开关为0时(EXEC),一旦按下启动键,运行触发器Cr一直处于“1”状态,因此时序信号TS1—TS4将周而复始地发送出去。
当STEP为1时(STEP),一旦按下启动键,机器便处于处于单步运行状态,此时只发送1个CPU周期的时序信号就停机。
利用单步方式,每次只读一条微指令,可以观察到指令的代码与当前微指令的执行结果。
另外,当机器连续运行时,如果STOP开关置“1”(STOP),也会停机。
由于时序控制电路的内部线路已经连好,所以只需将时序电路与方波信号源连接(即将时序电路的脉冲输入端Ø接至方波信号发生器输出端H23),时序电路的CLR已经接至实验板右下方的CLR模拟开关上。
四、实验内容1、微程序控制电路微程序控制电路组成:控制存储器(3片2816的E2PROM,具有掉电保护功能),微命令寄存器18位(用两片8D触发器(74LS273)和1片4D(74LS175)触发器组成),微地址寄存器6位(用3片正沿触发的双D触发器(74LS74)组成,它们带有清“0”端和预置端)。
在不判断测试的情况下,T2时刻打入微地址寄存器的内容即为下一条微指令地址。
微程序控制实验报告(共10篇)

微程序控制实验报告(共10篇)微程序控制器实验报告计算机组成原理实验报告一、实验目的:(1)掌握微程序控制器的组成原理。
(2)掌握微程序的编制、写入,观察微程序的运行过程。
二、实验设备:PC 机一台,TD-CMA 实验系统一套。
三、实验原理:微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。
它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。
这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。
微程序存储在一种专用的存储器中,称为控制存储器,微程序控制器原理框图如图所示:微程序控制器组成原理框图在实验平台中设有一组编程控制开关KK3、KK4、KK5(位于时序与操作台单元),可实现对存储器(包括存储器和控制存储器)的三种操作:编程、校验、运行。
考虑到对于存储器(包括存储器和控制存储器)的操作大多集中在一个地址连续的存储空间中,实验平台提供了便利的手动操作方式。
以向00H 单元中写入332211 为例,对于控制存储器进行编辑的具体操作步骤如下:首先将KK1 拨至‘停止’档、KK3 拨至‘编程’档、KK4 拨至‘控存’档、KK5 拨至‘置数’档,由CON 单元的SD05——SD00 开关给出需要编辑的控存单元首地址(000000),IN 单元开关给出该控存单元数据的低8 位(00010001),连续两次按动时序与操作台单元的开关ST(第一次按动后MC 单元低8 位显示该单元以前存储的数据,第二次按动后显示当前改动的数据),此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M7——M0 显示当前数据(00010001)。
然后将KK5 拨至‘加1’档,IN 单元开关给出该控存单元数据的中8 位(00100010),连续两次按动开关ST,完成对该控存单元中8 位数据的修改,此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M15——M8 显示当前数据(00100010);再由IN 单元开关给出该控存单元数据的高8 位(00110011),连续两次按动开关ST,完成对该控存单元高8 位数据的修改此时MC 单元的指示灯MA5——MA0 显示当前地址(000000),M23——M16 显示当前数据(00110011)。
微程序控制器实验

评语: 课中检查完成的题号及题数:课后完成的题号与题数:成绩: 自评成绩:实验报告实验名称:微程序控制器实验日期:班级:学号:姓名:一、实验目的:1.掌握微程序控制器的组成原理。
2.掌握微程序的编制、写入,观察微程序的运行过程。
二、实验内容:1.了解如何将微码加载到微控存中,了解指令并运行。
2.通过微程序控制器实验能得简单运算结果。
3.设计并修改电路,编写用微程序实现存储器中两个单字节十六进制数的加法运算,结果输出至OUT单元。
三、项目要求及分析:要求:操作数由IN单元输入至MEM,在由MEM中读出操作数并在ALU中运算。
四、具体实现:1. 按图1-3-10 所示连接实验线路,仔细查线无误后接通电源。
如果有‘滴’报警声,说明总线有竞争现象,应关闭电源,检查接线,直到错误排除。
图1-3-10 实验接线图2. 对微控器进行读写操作,分两种情况:手动读写和联机读写。
1) 手动读写进行手动读或是写,都需要手动给出地址,系统专门安排了一个ADDR 单元,做为地址输入。
ADDR 单元原理如图1-3-11 所示,可以看出本单元实为一个加减计数器。
当开关为‘加1’档时,在T2 的下沿计数器进行加1 计数,当开关为‘减1’档时,在T2 的下沿计数器进行减1计数,当开关置为‘置数’档时,计数器置初值,其作用相当于直通,SA7…SA0 的输出值就是二进制开关组的值。
在实验中选择什么档位,取决于写入数据的地址是否连续,如果是连续地址,选择‘加1’或是‘减1’档会方便一些。
如果是离散地址,选择‘置数’档会方便一些。
图1-3-11 ADDR 单元原理图(1) 手动对微控器进行编程(写)①按图1-3-12 接好线(部分实验接线被改变,手动读写微控器完成后应予恢复)。
②将MC 单元编程开关置为‘编程’档,时序单元状态开关置为‘单步’档,ADDR单元状态开关置为‘置数’档。
③使用ADDR 单元的低6 位SA5…SA0 给出微地址MA5…MA0,微地址可以通过MC 单元的MA5…MA0 微地址灯显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
-------------大学信息学院
《计算机组成原理》 实验报告
实验名称 微程序控制单元实验
实验室 实验楼 实验日期
实验七 微程序控制单元实验
一、实验目的
1、 掌握时序产生器的组成方式。
2、 熟悉微程序控制器的原理。
3、 掌握微程序编制及微指令格式。
二、实验原理
微程序控制器的基本任务是完成当前指令的翻译和执行,即将当前指令的功能转换成可以控制的硬件逻辑部件工作的微命令序列,完成数据传送和各种处理操作。
它的执行方法就是将控制各部件动作的微命令的集合进行编码,即将微命令的集合仿照机器指令一样,用数字代码的形式表示,这种表示称为微指令。
这样就可以用一个微指令序列表示一条机器指令,这种微指令序列称为微程序。
微程序存储在一种专用的存储器中,称为控制存储器,微程序控制器原理图。
控制器是严格按照系统时序来工作的,因而时序控制对于控制器的设计是非常重要的,从前面的实验可以很清楚地了解时序电路的工作原理,本实验所用的时序由时序单元来提供,为四拍 TS1、TS2、TS3、TS4,其中控制存储器采用 3 片 2816 的 E2 PROM ,具有掉电保护功能,微命令寄存器 18 位,用三片 8D 触发器(273)和一片 4D (175)触发器组成。
微地址寄存器 6 位,用三片正沿触发的双 D 触发器(74)组成,它们带有清“0”端和预置端。
在不判别测试的情况下,T2 时刻打入微地址寄存器的内容即为下一条微指令地址。
当 T4 时刻进行测试判别时,转移逻辑满足条件后输出的负脉冲通过强置端将某一触发器置为“1”状态,完成地址修改。
⒈ 微程序控制电路
微程序控制器的组成见下图,其中控制存储器采用4片6116静态存储器,微命令寄存器32位,用三片8D 触发器(273)和一片4D(175)触发器组成。
微地址寄存器6位,用三片正沿触发的双D 触发器(74)组成,它们带有清零端和置位端。
在不判别测试的情况下,T2时刻打入微地址寄存器的内容即为下一条微指令地址。
当T4时刻进行测试判别时,转移逻辑满足条件后输出的负脉冲通过置位端将某一触发器输出端置为“1”状态,完成地址修改。
姓名 学号 班级 年级 指导教师
⒉ 微指令格式
微指令格式
其中UA5~UA0为6位的后续微地址,A 、B 二译码字段,分别由6个控制位译码输出多位。
B 段中的PX3、PX2、PX1 三个测试字位,其功能是根据机器指令及相应微代码进行译码,使微程序转入相应的微地址入口,从而实现微程序的顺序、分支、循环运行。
二进制控制单元的C 、B 、A 不同状态组合决定了PC-B 、ALU-B 、299-B 、R0-B 、R1-B 、R2-B 这六个部件的内容送总线,其状态表如下表所示: A 字段
C
B A 选择 0 0 0 禁止 0 0 1 PC-B 0 1 0 ALU-B 0 1 1 299-B 1 0 0 Rs-B 1 0 1 Rd-B 1 1 0 保留位 1
1
1
保留位
二进制控制单元的中断(PX3)、M9(PX2)、M1(PX1)的不同状态组合决定P 的测试方式,其具体控制状态如表所示:
B 字段
⒊ 微程序流程与代码
下图为几条机器指令对应的参考微程序流程图,将全部微程序按微指令格式变成二进
M25 M24 M23 M22 M21 中断 M19 M18 M17 M16 M15 M14 M13 M12 M11 M10 M9 M8
C
B
A
AR 保留位 PX3 A9 A8 CE LOAD CN
M
S0
S1
S2
S3 PX2 LDAR
M7
M6
M5
M4
M3
M2 8
7
6
5
4
3
M1
M0
LDPC LDIR LDDR2 LDDR1 LDR0
WE
UA0 UA1 UA2 UA3 UA4 UA5 PX1 SW-B
中断 M9 M1 选择 测试字 PX3 PX2 PX1 0 0 0 关闭测试 0 0 1 P (1) 识别操作码 0 1 0 P (2) 判寻址方式 0 1 1 P (Z) Z 标志测试 1 0 0 P (I) 中断响应 1 0 1 P (D) 中断服务 1 1 0 P (C) C 标志测试 1
1
1
保留位
制代码,可得到模型机(一)所列举的8位指令代码。
微程序流程图
三、实验连线
微地址控制单元的实验连线图
按上图所示,连接实验电路:
①总线接口连接:用8芯扁平线连接图中所有标明“”或“”图案的总线接口。
②控制线与时钟信号“”连接:用双头实验导线连接图中所有标明“”或“”图案的插孔(注:Dais-CMH的时钟信号已作内部连接)。
四、实验内容及结果分析
手动方式下的微地址打入操作
微程序控制器组成原理图
微程序控制器的组成见上图,其中微命令寄存器32位,用三片8D触发器(273)和一片
4D(175)触发器组成。
它们的清零端由CLR 来控制微控制器的清零。
它们的触发端CK 接T2,在时序节拍的T2时刻将微程序的内容打入微控制寄存器(含下一条微指令地址)。
(1)微地址控制原理
微地址控制原理图
(2)微地址的打入操作
在“L”状态下,首先置SW-B=0,然后向数据开关置数,再按【单步】键,在机器周期的T2时刻把数据开关的内容打入微地址锁存器。
实验步骤如下:
A. 在缓冲输入中输入00000010;
B. 使SW-B=0,然后按单步键;
C. 在缓冲输入中输入00000011;
D. 使SW-B=0,然后按单步键; (3)微地址的修改与转移
按图所示,微地址锁存器的置位端R 受SE5~SE0控制,当测试信号SE5~SE0输出负脉冲时,通过锁存器置位端R 将某一锁存器的输出端强行置“1”,实现微地址的修改与转移。
按微程序流程图所示的微控制流程,对指令译码寄存器IR 分别打入微控制流程定义的操作码20H 、40H 、60H 、80H 、0A0H ,然后打入流程图定义的基地址08H ,按【单步】键,在机器周期T4节拍按微控制流程对IR 指令寄存器的内容进行测试和判别,使后续微
数据开关 (00000010)
数据开关 (00000010)
数据开关 (00000011)
数据开关 (00000011)
地址转向与操作码相对应的微程序入口地址。
举例操作如下:
① 当IR 寄存器为20H 、微地址为08H 时,按【单步】键后微地址为09H 。
A. 在缓冲输入中输入00100000;
B. 使CBA =000,CE =0,SW-B=1;
C. LDIR=1,然后按单步键;
D. LDIR=1,SW-B=0;
E. 按单步键;
F. P (1)=1,然后按单步键;
② 当IR 寄存器为60H 、微地址为08H 时,按【单步】键后微地址为0BH 。
A. 在缓冲输入中输入00100000;
B. 使CBA =000,CE =0,SW-B=1;
C. LDIR=1,然后按单步键;
D. LDIR=0,SW-B=0;
E. 按单步键;
F. P (1)=1,然后按单步键;
结果分析:
(1)通过数据开给微地址单元输入地址时,数据部经过地址总线,即直接到达微地址单元。
① 微程序运行时,首先先去取指令,也就是将PC 的值送给地址寄存器(CPU 将要访问的地址),接着修改PC 值取下一条指令;RAM 将其所指的内容送往总线BUS ,再由总线送给指令寄存器IR ,此时假设IR 寄存器为20H ,微地址为80H ,因为每一段微程序
数据开关 (00100000)
指令寄存器IR (00100000)
数据开关 (00001000)
微地址灯
(001000)
微地址灯 (001000)
数据开关 (01100000)
数据开关 (00100000)
指令寄存器IR (01100000)
微地址灯 (001000)
微地址灯
(001011)
都对应有一个首地址,通过P(1)测试和判别,这样通过测试和判别就使后续微地址转向与操作码(20H)相对应的微程序入口地址(09H),这样就完成了微地址的修改于转移。
②同理,当IR寄存器为60H,微地址为80H,因为每一段微程序都对应有一个首地址,通过P(1)测试和判别,这样通过测试和判别就使后续微地址转向与操作码(20H)相对应的微程序入口地址(09H),这样就完成了微地址的修改于转移。
五、实验总结
通过这次实验,我对计算机组织与体系机构这门课有了一个全新的认识,通过做实验我明白了机器指令是怎样被翻译为机器所能识别的微程序,即二进制代码,进而执行该命令,另外对微程序的编制及微指令格式都有了进一步的了解。
这个实验含盖了我前几次的实验的几乎所有,可以说是对前几次试验的综合运用。
这也更让我感觉到了微程序控制这节内容在整个计算机组织与体系结构中的重要作用。