基于ADAMS的碰撞仿真分析
基于ADAMS的汽车多种工况的仿真

右后轮: Step ( tmi e, 0, 0, 5, 60) + Step ( tmi e,
15, 0, 20, 30); 左右后轮的制动力表达式: Step ( t im e, 50, 0,
3结 语
建立了某轿车的整车动力学仿真模型, 包括前悬
68
华北水利水电学院学 报
2009年 8月
产品设计开发周期、降低设计成本、提高设计质量的 目的.
1) 轻载爬坡速度; 2) 满载爬坡速度 3) 轻载爬坡加速度; 4) 满载爬坡加速度
图 3 轻、满 载爬坡速度和加速度
架、转向机构、后悬架以及底盘车身等. 完成了车辆 直行工况和爬坡工况在轻载、满载的情形下仿真和 分析, 并对各自的特点作出对比. 该方案为车辆在虚 拟环境下进行多工况的仿真分析提 供了一个新平 台, 为车辆深层次的设计和优化提供了一种新手段. 可以帮助相关企业摆脱对物理样机的依赖, 达到缩短
1 汽车模型的创建
1. 1 建 模 汽车包括车身、发动机、行走系、转向系、制动
系、传动系 和辅助设 备 [ 2- 3] , 是 一个复杂 的机械系 统, 如果按照车辆的真实构造进行建模, 工作量非常 大. 因此根据研究的目的, 在建模时对车辆的结构进 行了适当的抽象、简化, 对建立的整车动力学模型作
参考文献
[ 1] 唐应时, 廖丹, 李克安, 等. 汽车 双前桥转 向系统 的运动 学和动力学的 建模与 仿 真分 析 [ J]. 湘 潭大 学学 报: 自 然科学版, 2003, 28( 3): 98- 101.
[ 2] 王望予. 汽车设计 [M ]. 北京: 清华大学出版杜, 2002. [ 3] 陈家瑞. 汽车构造 [M ]. 北京: 人民交通出版社, 2000. [ 4] 李军, 邢俊文, 覃文洁, 等. ADAM S 实例教程 [M ]. 北京:
基于adams的汽车操纵稳定性仿真分析

摘要随着汽车技术的发展,用户对汽车性能的要求越来越高,汽车行业的竞争逐渐加剧。
在产品开发中采用虚拟样机分析的开发策略,已成为各大汽车公司缩短产品开发周期、减少产品开发费用、提高产品开发质量,从而提高竞争能力的主要做法。
以多体动力学为理论基础的ADAMS软件是由美国MDI公司开发的一种机械系统动力学分析软件。
目前己成为世界各主要汽车公司及其零部件供应商的主要动力学仿真软件。
利用ADAMS/Car软件,建立了包括前后悬架、转向、车身、动力总成、轮胎、路面等系统在内的整车多体动力学模型。
应用该模型进行了稳态回转、转向回正性、转向盘角阶跃输入、转向盘角脉冲输入、蛇行等仿真分析,同时还以操纵稳定性中的角阶跃试验为例,分别分析了汽车的质心高度、前后位置、前后悬架弹簧刚度和整车载荷等参数对操纵稳定性的影响。
仿真结果表明,该车具有良好的操纵稳定性,从分析来看质心略微前移汽车的操纵稳定性得到改善;而适当的降低质心高度、增加前后悬架弹簧刚度、和减少载荷,有利于整车的操纵稳定性。
关键词:ADAMS;仿真;操纵稳定性Simulation Analysis of Vehicle Handling Stability of Santana2000 Based on ADAMS/CarABSTRACTWith the development of the vehicle technology,and concerning about the car performance,the competition of the car industry becomes more and more intense.In the exploitation of the production,one of the main methods is to use the virtual prototyping technology to exploit the production of car,which may deeply shorter the competition ability,lessen the expenses,improve the quantity,and enhance the competition ability.Based on the multi-body dynamics theory exploited by Mechanical Dynamics,Inc,the ADAMS is a type of software of dynamic analysis of mechanical system.At present,many main car corporation and their accessory suppliers use the ADAMS an their main software of dynamic analysis of mechanical system.The article builds a whole vehicle model that contains suspension,stabilize bar, steering,body,powertrain,tires and road etc by using ADAMS/Car.Appling the full vehicle model,have performed Steady static circular test simulation,returnability test simulation,Steering wheel angle step input simulation,Steerwheel angle pulse input simulation,Pylon course slalom test simulation,and through triangular bump pulse input simulation test,several main factors are discussed in order to study the rule of vehicle parameters affecting on handing stability, including mass gravity center height, the location of center of mass, leaf spring stiffness and the load.The simulation results show that handing stability of the vehicle is good. From the analysis of the test, the centroid slightly forward is beneficial to handing stability. And suitably reducing the height of mass center, increasing front and rear leaf spring stiffness and load reduction can be improved handling stability performance.Key Words: ADMAS;Simulation;Handling Stability目录摘要 (I)ABSTRACT (II)引言 (1)1 绪言 (2)1.1 课题的研究背景 (2)1.2 课题研究的历史及发展现状 (3)1.2.1 车辆操纵稳定性研究历史及现状 (3)1.2.2 车辆动力学仿真技术发展及现状 (4)1.3 小结 (6)2 基于ADAMS/Car 的车辆建模 (7)2.1 ADAMS/Car 建模基本原理 (7)2.2 车辆仿真模型的相关参数 (8)2.3 前悬架模型的建立 (8)2.4 后悬架建立 (10)2.5 转向系模型的建立 (12)2.6 轮胎模型的建立 (13)2.7 车身模型 (15)2.8 动力模型的建立 (15)2.9 整车模型装配 (16)2.10 小结 (16)3 汽车操纵稳定性仿真试验及影响因素分析 (17)3.1 汽车操纵稳定性概述 (17)3.2 转向盘转角阶跃输入仿真试验 (18)3.2.1 车速为105km/h下的转向盘角阶跃输入仿真试验 (18)3.2.2 不同速度下转向盘角阶跃输入仿真试验 (20)3.2.3 不同弹簧刚度下转向盘角阶跃输入仿真试验 (21)3.2.4 不同质心高度转向盘角阶跃输入仿真试验 (24)3.2.5 质心前后位置转向盘角阶跃输入仿真试验 (25)3.2.6 满载与空载转向盘角阶跃输入仿真试验 (27)3.3 转向盘转角脉冲输入仿真实验 (28)3.3.1 汽车在105km/h下的转向盘转角脉冲试验 (28)3.3.2 不同速度下转向盘转角脉冲试验 (29)3.4 转向回正仿真试验 (31)3.5 稳态回转仿真实验 (32)3.6 蛇形仿真实验 (33)3.7 小结 (36)全文总结 (37)参考文献 (38)致谢................................................................................................ 错误!未定义书签。
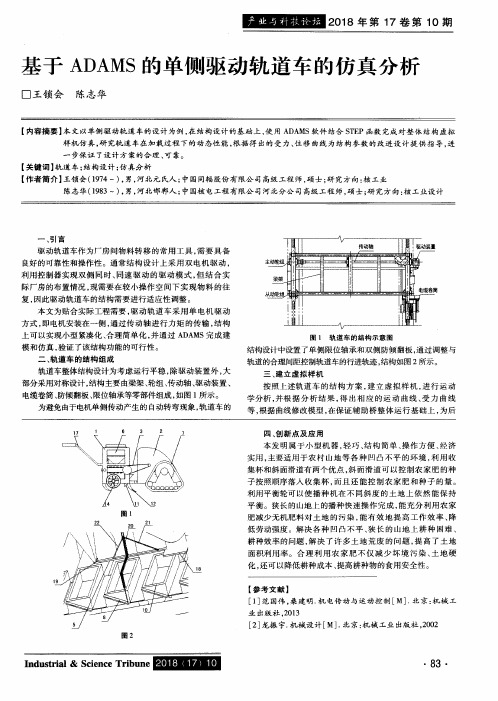
基于ADAMS的单侧驱动轨道车的仿真分析
. 84 .
Industrial& Science Tribune
程 中 ,输 出沿轨 道方 向和水平 垂直于 轨道方 向 的位 移 和速度 变化 曲线 ,观察 速度 与位 移 曲线 与设计 的符 合性 ,检 测运 行 是否顺 利 ,仿 真得出 的位移变 化曲线如图 4、图 5所示 。
Tim (sec)
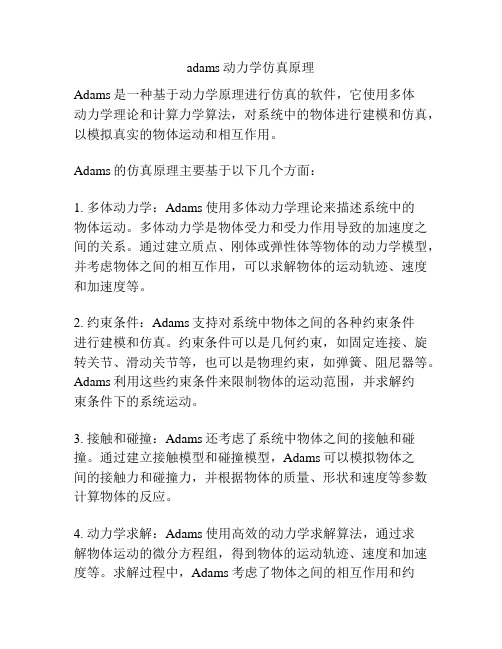
图 4 模 型 质 心 (x 轴 向)位 移 L与 时 间 t的 关 系 曲 线
通过图 4可知 ,轨道车在平 行轨道 方 向(X轴 向 )上运行 状 态 良好 ,曲线基本符合 预期 ,在 开始运 行 阶段 ,由于存 在 电 缆卷 筒的拉力 ,使得开始速度 有所迟缓 ,曲线也略有波 动。
苫
重
/1 九^ ^ tt ~A^ ^ ^ k 一 ^ jA^^人
i y V V V V、一 V’V V U V V J V V V。v V
四 、结 语 本 文 为 论 证 新 的 结 构 方 案 的 可 行 性 和 可 操 作 性 ,最 大 程 度上 降低设 计 风险 ,建立 驱 动车 的虚 拟样 机模 型 ,利用 AD. AMS进 行运 动学仿 真 ,将动 态性 能可视 化 ,验证 结构设 计 的 合 理性 ,为实际工作提供 了理论 依据 。
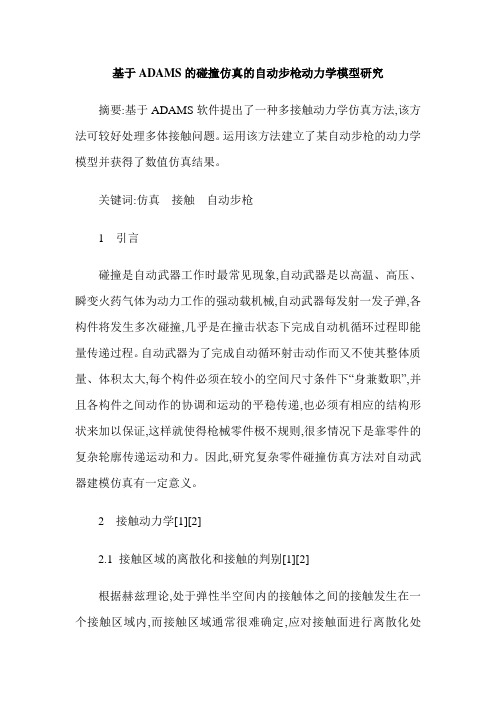
图 5 限 位 轴 承 质 心 (Z轴 向 )位 移 L与 时 间 t的 关 系 曲线 通 过 图 5可 以 看 出 ,轨 道 车 在 运 行 过 程 中 ,垂 直 于 轨 道 方 向上 的 位 移 往 复 变 化 ,说 明 轨 道 车 并 非 按 预 期 笔 直 前 行 。
【参 考文献】 [1]郑 建 荣.ADAMS一虚 拟 样 机 技 术 入 门与 提 高 [M].北 京 : 机 械 工 业 出 版社 ,2001 [2]胡 敏 ,杨 建 国等 .基 于 ADAMS的 有 轨 引 导 小 车 运 动 学仿 真及设计 改进 [J].机械 设计与制造 ,2012,10(10):81~83 [3]毛龙 所 ,王 学军.基 于 ADAMS的轨 道运 输 车驱动 系统 三 维建模及运 动仿 真 [J].机 电一体化 ,2014,4:20~22 [4]赵 玉侠 ,狄 杰建 ,高德 文.基 于 ADAMS的微 型 管道 机 器人 三 维实体运动仿真[J].实验室研究与探 索,2011,1(30):26~29
adams动力学仿真原理
adams动力学仿真原理
Adams是一种基于动力学原理进行仿真的软件,它使用多体
动力学理论和计算力学算法,对系统中的物体进行建模和仿真,以模拟真实的物体运动和相互作用。
Adams的仿真原理主要基于以下几个方面:
1. 多体动力学:Adams使用多体动力学理论来描述系统中的
物体运动。
多体动力学是物体受力和受力作用导致的加速度之间的关系。
通过建立质点、刚体或弹性体等物体的动力学模型,并考虑物体之间的相互作用,可以求解物体的运动轨迹、速度和加速度等。
2. 约束条件:Adams支持对系统中物体之间的各种约束条件
进行建模和仿真。
约束条件可以是几何约束,如固定连接、旋转关节、滑动关节等,也可以是物理约束,如弹簧、阻尼器等。
Adams利用这些约束条件来限制物体的运动范围,并求解约
束条件下的系统运动。
3. 接触和碰撞:Adams还考虑了系统中物体之间的接触和碰撞。
通过建立接触模型和碰撞模型,Adams可以模拟物体之
间的接触力和碰撞力,并根据物体的质量、形状和速度等参数计算物体的反应。
4. 动力学求解:Adams使用高效的动力学求解算法,通过求
解物体运动的微分方程组,得到物体的运动轨迹、速度和加速度等。
求解过程中,Adams考虑了物体之间的相互作用和约
束条件,并根据物体的质量、惯性、摩擦力等参数计算物体的运动状态。
总的来说,Adams的仿真原理基于多体动力学理论和计算力学算法,并考虑了物体之间的约束、接触和碰撞等相互作用,以模拟系统中物体的真实运动和行为。
基于ADAMS的碰撞仿真的自动步枪动力学模型研究
基于ADAMS的碰撞仿真的自动步枪动力学模型研究摘要:基于ADAMS软件提出了一种多接触动力学仿真方法,该方法可较好处理多体接触问题。
运用该方法建立了某自动步枪的动力学模型并获得了数值仿真结果。
关键词:仿真接触自动步枪1 引言碰撞是自动武器工作时最常见现象,自动武器是以高温、高压、瞬变火药气体为动力工作的强动载机械,自动武器每发射一发子弹,各构件将发生多次碰撞,几乎是在撞击状态下完成自动机循环过程即能量传递过程。
自动武器为了完成自动循环射击动作而又不使其整体质量、体积太大,每个构件必须在较小的空间尺寸条件下“身兼数职”,并且各构件之间动作的协调和运动的平稳传递,也必须有相应的结构形状来加以保证,这样就使得枪械零件极不规则,很多情况下是靠零件的复杂轮廓传递运动和力。
因此,研究复杂零件碰撞仿真方法对自动武器建模仿真有一定意义。
2 接触动力学[1][2]2.1 接触区域的离散化和接触的判别[1][2]根据赫兹理论,处于弹性半空间内的接触体之间的接触发生在一个接触区域内,而接触区域通常很难确定,应对接触面进行离散化处理。
ADAMS中采用对称点面接触法来离散接触区域,接触区域的离散通过实体模型的集合属性进行。
每一个零件都有一个形体(Shell)属性,每一个Shell属性和一个Shell文件相关联。
其中形体是通过很多多面体进行布尔运算拼接而成,Shell文件在三维实体创建过程中自动生成,记录包含所有节点的坐标和编号,并随形体的运动而发生相应改变。
两物体的接触判断基于非穿透条件,即相互接触的两个物体不能相互嵌入。
确定接触点与目标面之间的间隙或接触穿透是通过把接触点向法向投影获得。
节点与投影点的直线距离,如果直线距离小于0,说明接触发生了。
反之,表示两个接触体处于分离状态。
2.2 ADAMS中的碰撞力学模型ADAMS中有泊松模型和接触函数模型两种,期区别主要是在法向接触力的计算上,它们的接触约束方程和接触摩擦力的计算是相同的。
61-基于adams的碰撞仿真剖析[优质文档]
![61-基于adams的碰撞仿真剖析[优质文档]](https://img.taocdn.com/s3/m/6418e958777f5acfa1c7aa00b52acfc789eb9f74.png)
式中: a = h1 − h0 ; ∆ = (x − x0 ) /(x1 − x0 ) 。
step
=
h0 hh10
+
a
⋅
∆2
(3
x < x1
x ≥ x1
(2)
式中采用了 step 函数,其形式为 step(x, x0, h0, x1, h1) ,按式(2)进行计算。
−
q)e
−
cmax
⋅ (dq
/
dt) ⋅
step(q, q0
−
d ,1, q0 ,0)
q > q0 q ≤ q0
(1)
在 ADAMS 中有两种定义碰撞力的方法:一种是补偿法(Restitution);另一种是冲击函 数法(Impact)。相对而言,前者的参数更难准确设置,所以更多是选用后者来计算碰撞力。 冲击函数法是根据 impact 函数来计算两个构件之间的碰撞力,碰撞力由两个部分组成:一个 是由于两个构件之间的相互切入而产生的弹性力;另一个是由于相对速度产生的阻尼力。 impact 函数的一般表达式为:
谢最伟 吴新跃
(海军工程大学 船舶与动力工程学院,湖北 武汉 430033)
基于 ADAMS 的碰撞仿真分析
第三届中国 CAE 工程分析技术年会论文集
348
υ1 、υ2 分别是两物体的泊松比, E1 、 E2 分别是两物体的弹性模量。
对于非旋转体的碰撞,刚度系数可采用 ADAMS 的官方推荐值,即默认值进行计算。
3、积分误差(Error)。积分误差决定了在求解动力学方程的过程中,某一步的预测值与 校正值之间所能接受的差值。积分误差过大,计算容易进行,但最终结果会产生过大误差; 积分误差过小,求解时间太长。一般来讲,积分误差设为 0.001 较为适宜。
基于ADAMS的虚拟试验场自动化仿真系统
2024年财务经理辞职信公司董事会:各位领导董事以及董事会主席,在____公司的近____个月的时间我经过了我自身的努力和奋斗,由于我自身的缺点和性格难以和车间的同事融合。
因此我决定辞职。
辞去____公司总经理助理职务。
在辞去职务前我将我在____公司看到详细情况汇总如下。
主要分____块问题:财务改良、人力资源管理改善、制度体系化流程化规范化、销售的扩张问题。
因为企业发展到一定的程度必须要有所程度的改变也必然导致所有权和控制权的分离。
就像我做职业经理人,为股东打工。
不是为某一个人打工。
如果没有公司上层的权利的下放以及决心那么任何一个人来了也会和我一样,要不就混日子拿钱。
企业要发展壮大那么首先要有比较健全的制度来保障,大企业和小企业最重要的区别是什么?那就在于小企业的核心资源、信息都掌握在企业家一个人手里,而大企业的核心资源和信息却分散在管理人员。
所以小的企业可以靠感情来维系,而大的企业靠健全制度。
当然,单纯的靠制度也不可以完全管理好一个企业。
企业还需要企业文化,需要员工之间的相互理解、相互尊重和相互信任。
而我们____公司缺少的就是上面的东西、制度、企业文化员工的理解、尊重和信任。
上面所说的就是健全公司制度这是我们____公司发展的根基。
现有的____公司没有很好的制度和制度执行力,就是靠感情来维系,怎么样来提高制度执行力。
是我公司应该要面临的问题。
也就是我所说的____块问题的其中之一,制度的体系化流程化和规范化。
有了良好的制度和完善的制度那么就要有很好制度推行者,而他找来之前首先公司董事会要有一致的意见,还要有相应的公司职位法定权如果没有那也是一句空话也就谈不上还有____块的处理,人力资源管理改善、财务改良问题。
首先我来说一下人力资源管理改善问题,____公司总的员工也不多,除了技术和外面的那就说里面的员工。
虽然说我们的主任多不脱产,但是____多人的人员分____块且____个车间____个主任连带仓库有____个主任那就是管理资源浪费,我认为一个就可以。
基于adams的车辆冲击振动的模拟仿真研究
摘要随着经济的发展,人们的生活水平也越来越好,汽车也逐渐走进了千家万户,人们从刚开始对车辆要求具有良好的动力性和经济性逐渐开始注重车的平顺性和结构安全性,特别是在极端条件下的车辆的舒适性和安全性尤其令人关注。
因此,通过脉冲输入条件下的车辆建模与冲击振动仿真研究将成为车辆乘坐舒适性和结构安全性的有效途径,并有着重要的社会意义和理论价值。
本文在车辆结构组成及功用的基础上,利用ADAMS车辆仿真软件首先建立了包括轮胎模型、悬架模型、转向系统模型及车身模型在内的多自由度的车辆整车模型,并以不同参数形式的脉冲输入路面作为输入激励,对车辆在不同车速条件下的平顺性和结构安全性进行了仿真计算,获得了车身最大加速度和转向横拉杆及车轴的最大加速度值,为后续的研究提供了可靠的数据基础。
其次,以仿真结果所得到的车身垂直振动最大加速度数据为分析对象,采用多元线性回归分析的方法建立了车身最大加速度值与脉冲输入的宽度、高度以及车辆速度相互关系的回归模型,分析了在不同脉冲输入条件下的车辆平顺性特性,为汽车厂家的设计制造和用户的使用提供了实验依据。
最后,以仿真结果所得到的转向横拉杆和车轴垂直振动最大加速度数据为分析对象,采用多元线性回归分析的方法建立了转向横拉杆和车轴最大垂向加速度值与脉冲输入的宽度、高度以及车辆速度相互关系的回归模型,分析了在不同脉冲输入条件下的车辆结构安全性特性,为汽车厂家的设计制造和用户的使用提供了实验依据。
研究结果表明:(1)通过对车辆受到冲击振动时,并且以车身的垂向加速度为评价标准的平顺性仿真分析研究,得到了车辆平顺性最差的区域范围;(2)通过对车辆受到冲击振动时,并且分别以车轴和转向横拉杆的垂向加速度为评价指标的结构安全性仿真分析研究,得到了车轴和转向横拉杆的结构安全性最差的区域范围。
关键词:冲击振动,ADAMS,平顺性,结构安全性,多元回归iiAbstractWith the development of the economy, people's living standard is getting better and better, the car is also gradually going into the thousands of families, people gradually begin to focus on the ride comfort and safety of structure from the beginning of the car having good power and economy, especially in extreme conditions, the comfort and safety of vehicles are of particular concern. Therefore, the research of vehicle modeling and simulation under the condition of pulse input will be an effective way to ride comfort and structural safety, which has important social significance and theoretical value.In this paper, based on the structure and function of the vehicle, the vehicle using the ADAMS simulation software was established, including vehicle model with multi degree of freedom suspension model, tire model, steering system model and body model, Taking the pulse input road surface with different parameters form as input, the vehicle at different speed under the condition of the comfort and safety of structure are simulated, obtained the maximum acceleration of the body and the tie rods and axles of the maximum acceleration value, the data basis for the subsequent research provided reliable.Then, the body vertical maximum vibration acceleration data with simulation results obtained by the analysis object, method of using multiple linear regression analysis to establish the maximum acceleration value regression model of the relationship between the body and the input pulse width, height and speed of vehicles, The characteristics of vehicle ride comfort under different pulse input conditions are analyzed, which provides a theoretical basis for the design and manufacture of automobile manufacturers and users.Finally, the maximum acceleration data of the vertical and horizontal vibration of the steering tie rod and the axle are obtained by the simulation results, the method uses multiple linear regression analysis to establish the maximum acceleration of the tie rod and steering axle value regression model of the relationship between the input pulse and the width and height of the vehicle speed and the analysis of the characteristics of the vehicle structure safety under different input pulse, provides a theoretical basis for the design and manufacture of automobile manufacturers and users.The results show that:(1) Based on the simulation analysis of ride comfort of vehicle under impact and vibration, and the vertical acceleration of vehicle as the evaluation criterion, the worst range of vehicle ride comfort is obtained; (2) The impact of vibration on the vehicle, and were in the axle and steering cross rod vertical acceleration simulation research to structure safety evaluation analysis, the axle and steering tie rod structure of the safety of theiiiworst areasKEY WORDS:Impulsive vibration,ADAMS,Comfort,Structural safetyMultiple regressioniv目录第一章绪论 (1)1.1 研究背景 (1)1.2 ADAMS介绍 (1)1.3 国内外研究现状 (2)1.3.1 国外研究现状 (3)1.3.2 国内研究现状 (3)1.4 研究内容和技术路线 (4)1.4.1 本论文的主要研究内容 (4)1.4.2 本论文的技术路线 (5)第二章整车模型的建立 (7)2.1 整车模型的简化 (8)2.2 利用ADAMS/Car建立整车模型 (8)2.2.1 前悬架子系统模型的建立 (9)2.2.2 转向子系统模型的建立 (10)2.2.3 后悬架子系统模型的建立 (11)2.2.4 轮胎模型的建立 (13)2.2.5 车身模型的建立 (13)2.3 整车模型的装配 (14)2.4 本章小结 (15)第三章脉冲输入路面模型的建立 (16)3.1 脉冲路面建模理论基础 (16)3.2 3D等效容积路面建模方法 (16)3.3 脉冲路面模型的建立 (18)3.4 本章小结 (19)第四章车辆冲击振动的平顺性分析 (20)4.1 整车的结构参数 (20)4.2 脉冲输入路面模型参数 (20)4.3 脉冲输入路面平顺性仿真 (21)v4.4 车辆冲击振动仿真结果分析 (24)4.5多元回归 (25)4.6 车辆冲击振动平顺性分析 (28)4.7 本章小结 (29)第五章车辆结构安全性仿真分析 (30)5.1 转向横拉杆结构安全性仿真分析 (30)5.1.1 转向横拉杆结构安全性仿真 (30)5.1.2 多元回归 (31)5.1.3 转向横拉杆结构安全性分析 (34)5.2 车轴结构安全性仿真分析 (36)5.2.1 车轴结构安全性仿真 (36)5.2.2 多元回归 (36)5.2.3 车轴结构安全性分析 (39)5.3 本章小结 (40)总结与展望 (42)附录 (44)参考文献 (58)攻读学位期间发表的学术论文及专利成果 (61)致谢 (62)vi第一章绪论第一章绪论1.1研究背景随着经济的发展,人们的生活水平也越来越好,汽车也逐步走进了寻常百姓家庭,进而人们对车辆的关注点也逐渐由车的实用性转变为车辆的乘坐舒适性和安全性,特别是在极端条件下的车辆的舒适性和安全性尤其令人关注。
基于MATLAB和ADAMS的汽车ESP联合仿真
摘要汽车电子稳定程序系统ESP是一种新型主动安全控制系统,也是最近几年汽车安全领域研究的热点。
这种新型系统能够根据汽车驾驶员的意图和路面状况主动的控制汽车的运动,避免危险状况的发生,提高行驶安全性。
本文首先对ESP的稳定控制原理进行了分析,并利用Matlab/simulink 建立了汽车二自由度模型,得到汽车在行驶中理论的横摆角速度和质心侧偏角,然后在Adams/Car建立了汽车整车模型,并对该模型进行了仿真试验,以便为后续的实验研究提供准确的模型。
在控制方面选用PID控制,以横摆角速度和质心侧偏角的误差作为输入,把调整汽车稳定所需要的力矩作为输出。
用Adams/Control将汽车模型和Simulink连接后,又对整车车进行了转向盘阶跃模拟试验,试验结果表明配有ESP系统的汽车有比较好的路径保持能力,转弯半径明显减小,且横摆角速度和质心侧偏角都能得到较好的控制。
由此可以看出ESP确实能较好的改善汽车操纵稳定性和汽车行驶的安全性。
关键词:汽车;ESP;二自由度模型;PID控制;联合仿真。
参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参AbstractESP Electronic Stability Program system is a new active safety control system. In recent years it also became the hot field of automotive safety research. The new system based on the intention of driver can actively control and road conditions motorists sports car, to avoid dangerous situations and improve driving safety.The ESP stability control principle is analyzed at first,and the two degree of freedom model car is also established by Matlab / Simulink .From it getting the theory of yaw rate and lateral sideslip angle, then Adams / car automobile model was established. At last a simulation experiment is made on this model in order to provide an accurate model for the subsequent experimental study. As control ,the PID control is used and the yaw rate and sideslip angle error are used as input, the torque required to adjust the car stable as output.With Adams / Control after the car model and Simulink connection, and carried out on the vehicle steering wheel vehicle simulation step.The results showed that the car is equipped with ESP systems ability to maintain a relatively good path, turning radius is significantly reduced, and the yaw rate and sideslip angle can be better controlled. It can be seen that ESP really can better improve vehicle handling and stability and safety of cars.Key words: Vehicle; ESP; Two degrees of freedom model ; PID control;C o-simulation;参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参目录摘要 (I)Abstract (II)1 绪论 (1)1.1 研究ESP的背景和意义 (1)1.2 ESP系统的关键技术 (2)1.3 国内外ESP 系统研究 (3)1.4本文研究的主要内容 (8)2 ESP系统的基本理论 (9)2.1汽车失稳的原因分析 (9)2.2 ESP系统的介绍 (11)2.3 ESP系统的控制策略分析 (13)2.4本章小结 (15)3 汽车模型的建立 (16)3.1 相关软件的介绍 (16)3.2 影响汽车稳定性的参数 (21)3.3 汽车参考模型的建立 (22)3.4 Adams/Car汽车模型的建立 (24)3.5整车模型的检验 (28)3.6本章小结 (30)4 基于汽车ESP控制系统的设计 (31)4.1 ESP系统控制系统的分析 (32)4.2 PID控制系统 (34)4.3 本章小结 (41)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参5 基于Adams和Matlab 的汽车ESP联合仿真 (42)5.1联合仿真的简介 (42)5.2导入Adams子系统模型 (43)5.3 PID控制的ESP仿真模型的建立与分析 (46)5.5 本章小结 (49)6 结论与展望 (50)参考文献 (52)致谢 (54)附录 (55)参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参参考设计材料,包含项目源代码,屏幕录像指导、项目运行截图、项目设计说明书、任务书、报告书以及文献参1 绪论1.1 研究ESP的背景和意义在现代社会中,汽车在我们的日常生活中充当着重要角色,成为人们日常工作生活不可或缺的工具,相应的汽车的安全性也越来越受到人们的关注。
ADAMS 2023动力学分析与仿真从入门到精通
ADAMS 2023动力学分析与仿真从入门到精通简介ADAMS(Advanced Dynamic Analysis of Mechanical Systems)是一种用于进行动力学分析和仿真的强大工具。
它可以帮助工程师和设计师在产品开发过程中预测和优化机械系统的性能。
无论是汽车、飞机还是机械设备,ADAMS都可以用来模拟其在不同工况下的动态行为。
本文档将介绍ADAMS 2023的基本概念和操作指南,从入门到精通,帮助读者快速上手并掌握ADAMS的使用方法。
1. ADAMS简介1.1 ADAMS的定义ADAMS是一种基于多体动力学理论的仿真软件,它能够对复杂的机械系统进行动力学分析和仿真,并提供详细的结果和可视化的模拟效果。
它主要用于评估系统的运动性能、力学特性和振动响应,是工程师进行设计优化和故障排查的重要工具。
1.2 ADAMS的应用领域ADAMS广泛应用于汽车、航空航天、机械设备等领域,用于模拟和分析复杂机械系统的动态行为。
例如,汽车制造商可以使用ADAMS来评估车辆的悬挂系统、转向动力学和车身振动特性;航空航天公司可以使用ADAMS来模拟飞机的飞行动力学和振动响应。
2. ADAMS基本概念2.1 多体系统ADAMS将机械系统建模为多个刚体之间的约束系统。
每个刚体包含了几何特征、质量和惯性属性。
通过在刚体之间添加约束和运动条件,可以建立复杂的多体系统模型。
2.2 约束约束用于描述刚体之间的相对运动关系。
ADAMS提供了各种类型的约束,如平面、关节、铰链等。
通过正确定义约束条件,可以模拟系统的运动和力学特性。
2.3 运动条件运动条件用于描述系统的运动。
ADAMS提供了多种运动模式,如位移、速度、加速度和力矩等。
通过在刚体上施加运动条件,可以模拟系统的各种运动情况。
3. ADAMS操作指南3.1 ADAMS界面ADAMS的用户界面由多个工具栏、菜单和窗口组成。
主要包括模型浏览器、属性编辑器、运动学模块、仿真控制和结果查看器等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ADAMS 的碰撞仿真分析谢最伟 吴新跃(海军工程大学 船舶与动力工程学院,湖北 武汉 430033)摘要摘要::碰撞仿真是一个很复杂的问题,在ADAMS 中进行碰撞仿真涉及到很多参数的定义、模型的准确建立等问题。
参数设置不准确,得出的结果便不精确,甚至会使仿真失败。
本文以ADAMS 的碰撞仿真理论为基础,在综合分析碰撞参数物理意义的基础上。
通过一对直齿圆柱齿轮的碰撞实例,分析了不同参数对仿真结果精度的影响,得出了对碰撞参数的设置具有参考价值的结论。
关键词关键词::ADAMS;碰撞仿真;碰撞参数;齿轮1 1 引引言利用动力学仿真软件ADAMS 可以较方便地求解刚性体的碰撞问题,但计算参数的选取对计算结果的准确性有很大影响,成为人们应用ADAMS 准确、快速解决碰撞问题的难点和重点,计算参数如果设置的不够准确,在进行碰撞仿真时可能会出现穿透现象,甚至会使计算终止。
从现有文献来看,人们只是对刚度、碰撞力指数及阻尼的定义进行了一些分析研究,大量计算表明,仅仅注重这几个参数是远远不够的。
本文以ADAMS 的碰撞力定义方法为依据,对碰撞参数的设置进行了比较全面的分析研究,通过具体碰撞仿真实例,得出了一些如何合理进行参数设置的结论。
2 ADAMS 碰撞碰撞力的定义力的定义力的定义在ADAMS 中有两种定义碰撞力的方法:一种是补偿法(Restitution);另一种是冲击函数法(Impact)。
相对而言,前者的参数更难准确设置,所以更多是选用后者来计算碰撞力。
冲击函数法是根据impact 函数来计算两个构件之间的碰撞力,碰撞力由两个部分组成:一个是由于两个构件之间的相互切入而产生的弹性力;另一个是由于相对速度产生的阻尼力。
impact 函数的一般表达式为:00max 0)0,,1,,()/()(0_q q q q q d q q step dt dq c q q k impact F e ≤> −⋅⋅−−=(1)式中:0q 为两个要碰撞物体的初始距离;q 为两物体碰撞过程中的实际距离; qt dq /为两个物体间距离随时间的变化率,即速度;k 为刚度系数;e 为碰撞指数;max c 为最大阻尼系数;d 为切入深度,它决定了何时阻尼力达到最大;为了防止碰撞过程中阻尼力的不连续,式中采用了step 函数,其形式为),,,,(1100h x h x x step ,按式(2)进行计算。
≥<<≤∆−∆⋅+=11001200)23(x x x x x x x h a h h step (2)式中:01h h a −=;)/()(010x x x x −−=∆。
3 3 碰撞参数设置分析碰撞参数设置分析碰撞参数设置分析对ADAMS 碰撞力定义的分析表明,碰撞接触力仿真需要确定刚度系数、碰撞指数、阻尼系数和阻尼系数达到最大所要经过的距离d 。
但如果想得到比较精确的结果,仅仅对这些参数进行分析设置是不够的,因为在ADAMS 中采用碰撞判断准则和碰撞动力学模型求解动力学方程组时,求解器是将碰撞力并入广义力矩阵中求解的。
而在ADAMS 中求解动力学问题也是需要对多个参数进行设置的,比如积分器设置、积分格式设置和积分误差设置等[1]。
本文对动力学方程求解过程不做赘述,详细过程可参考文献[2]。
3.1 3.1 刚度系数刚度系数刚度系数、、碰撞指数碰撞指数、、阻尼系数阻尼系数与与切入切入深度深度深度1、刚度系数(Stiffness)。
对旋转物体的碰撞,其刚度系数可近似地根据下式来确定[3]: *2/134E R k = (3) 式中:21111R R R +=,1R 、2R 分别为两碰撞物体碰撞处的半径;222121*111E E E υυ−+−=,1υ、2υ分别是两物体的泊松比,1E 、2E 分别是两物体的弹性模量。
对于非旋转体的碰撞,刚度系数可采用ADAMS 的官方推荐值,即默认值进行计算。
2、碰撞指数(Force Exponent)。
由式(1)可知,碰撞指数e 反映了材料的非线性程度。
其推荐值:金属与金属材料为1.5;橡胶材料为2。
3、最大阻尼系数(Damping)。
最大阻尼系数max c 表征碰撞能量的损失。
其值通常设为刚度系数的0.1~1%。
4、切入深度(Penetration Depth)。
切入深度表征最大阻尼时的侵入深度。
刚碰撞时,没有阻尼力,随着侵入深度增大,阻尼力加大,直到最大阻尼力。
其适合值为0.1mm。
3.2 3.2 积分器积分器积分器、、积分格式积分格式与与积分误差积分误差1、积分器(Integrator)。
ADAMS 中常用的刚性积分器有三种:GSTIFF、WSTIFF 与BDF,不同的刚性积分器,计算的效率和稳定性也有所不同,它们的计算稳定性关系为BDF >WSTIFF > GSTIFF,而数值计算效率关系为GSTIFF >WSTIFF > BDF [2] 。
GSTIFF 是最常用的积分器,也是系统默认的积分器。
BDF 积分器虽然计算时间最长,但它有时可求解GSTIFF 求解失败的问题。
2、积分格式(Formulation)。
ADAMS 提供了三种积分格式:I3、SI2和SI1。
I3格式求解速度快,但精度太差;SI2格式可以避免Jacobian 矩阵的病态,而且考虑了约束方程,虽然求解时间变长,但求解精度高;SI1求解精度比SI2还高,但它计算量太大,一般不采用。
3、积分误差(Error)。
积分误差决定了在求解动力学方程的过程中,某一步的预测值与校正值之间所能接受的差值。
积分误差过大,计算容易进行,但最终结果会产生过大误差;积分误差过小,求解时间太长。
一般来讲,积分误差设为0.001较为适宜。
3.3 3.3 仿真步数与其仿真步数与其仿真步数与其它它动力学参数动力学参数1、仿真步数(Steps)。
适当增大仿真步数有助于提高求解稳定性,但同时会增加计算时间,所以在实际过程中需要综合考虑。
2、积分步长(time step)。
ADAMS 分别用参数Hmax、Hmin ,Hinit 规定积分的最大时间步长、最小时间步长和初始时间步长。
3、最大迭代次数(Maxit)。
ADAMS 用参数Maxit 控制牛顿迭代收敛到结果的次数。
牛顿迭代中需要求解线性方程组,过大的迭代次数将导致累积误差的加人而产生错误的结果。
默认值为10。
4、校正器(Corrector):ADAMS 中有两种校正器Original 和Modified。
这两种校正器的主要区别在于对迭代收敛的判定上,其中Modified 校正器对收敛的判定比较宽松。
系统默认校正器是Original。
5、积分多项式阶数(Kmax):在ADAMS 中,用参数Kmax 控制积分多项式的最大阶数,刚性积分器中默认阶是6。
当系统包含非连续量的时候,若将积分阶设为2( 1、2阶向后差分多项式可在任意步长上保证计算的稳定性)可以提高计算速度,因为这样避免了频繁的变阶计算。
3.4 3.4 算例算例算例3.4.1 3.4.1 计算计算计算本文算例为一对标准渐开线圆柱直齿轮,两齿轮参数与材料相同,见表1。
主动轮施加恒定转速600转/分,从动轮施加的最大负载扭矩为400N•m,为了防止负载突变,使用了函数step(time,0,0,0.005,400)。
仿真时间为0.2s。
表1 齿轮参数与材料特性 项目 齿数 模数 齿宽(mm) 材料 密度(kg/m3)弹性模量(GPa) 泊松比数值 20 5 30 45钢 7.8×103 207 0.29限于篇幅,根据作者使用ADAMS 的经验,只考虑了相对来讲对结果影响比较大的几个因素:刚度系数,仿真步数与积分格式。
而对其余参数,均采用取默认值,这样保证了在对某一特定参数进行分析时,其他参数是相同的。
1、刚度系数刚度系数的基准值通过式(3)计算得到k =2.38E+10N/m 3/2,为了进行对比,另取了刚度系数k =2.38E+09N/m 3/2和k =2.38E+11N/m 3/2进行了计算。
仿真步数为1000,积分格式为I3。
不同刚度系数下的计算结果如图1(a)~(c)所示。
图1(a) k =2.38E+09N/m 3/2 图1(b) k =2.38E+10N/m 3/2 利用ADAMS 后处理中的统计工具,略去刚接触的瞬间过程,可求得图1(a)计算结果的圆周碰撞力平均值为8109N,图1(b)为8030N。
2、仿真步数刚度系数取k =2.38E+10N/m 3/2,积分格式设为I3。
仿真步数考虑三种情况:500,1000和2000。
仿真结果如图2(a)~(b)所示, 步数为1000时的结果即为图1(b), 不再重 复列出。
图2(b)的圆周碰撞力平均值为8039N。
3、积分格式针对图1(c)和图2(a)出现的碰撞仿真失败的问题,可以考虑把积分格式设置为SI2,以图1(c) k =2.38E+11N/m 3/2 图1 不同刚度系数下的计算结果便分析SI2积分格式对结果的影响。
最终的结果如图3(a)~(b)所示。
图3(a)的圆周碰撞力平均值为8129N。
图2(a) steps=500 图2(b) steps=2000图2 不同仿真步数下的计算结果图3(a) k =2.38E+11N/m 3/2,steps=1000 图3(b) k =2.38E+10N/m 3/2,steps=500 图3 SI2积分格式下的计算结果3.4.2 3.4.2 结果分析结果分析结果分析1、由图1可分析出:根据式(3)计算出的刚度系数,能较好地满足要求,其计算结果8030N 与理论值(8000N)误差只有0.38%;刚度系数过大,可能会导致碰撞仿真失败。
2、结合图2和图1(b)可得出:仿真步数越大,结果越精确,甚至可以防止出现仿真失败;但到了一定的步数,再增大其值,结果变化很小。
3、从图1(c)与图3(a)、图2(a)与图3(b)的对比可分析得出:积分格式SI2具有非常好的稳定性,能够很好地解决I3格式下的仿真失败问题。
由以上三点可进一步得出如下结论:在进行碰撞仿真时,应先尽量调整刚度系数和仿真步数,最后再把默认的I3积分格式设置成SI2积分格式,这样得出的结果具有较大的精确性。
4 4 结语结语结语综合分析了ADAMS 中碰撞仿真的参数设置,说明了各参数的意义,让使用者对它们有了更加深入的了解;并且通过一对直齿圆柱齿轮的碰撞实例,分析了不同参数对仿真结果精度的影响,得出了一些对碰撞参数的设置具有较大意义的结论,这将为碰撞仿真的参数设置提供很好的参考。
但碰撞是个复杂的力学问题,理论尚不完备,更不用说仿真计算,只有结合理论知识,不断调整参数到适合值,才有可能得到比较精确的结果。