根轨迹例题
根轨迹例题——精选推荐

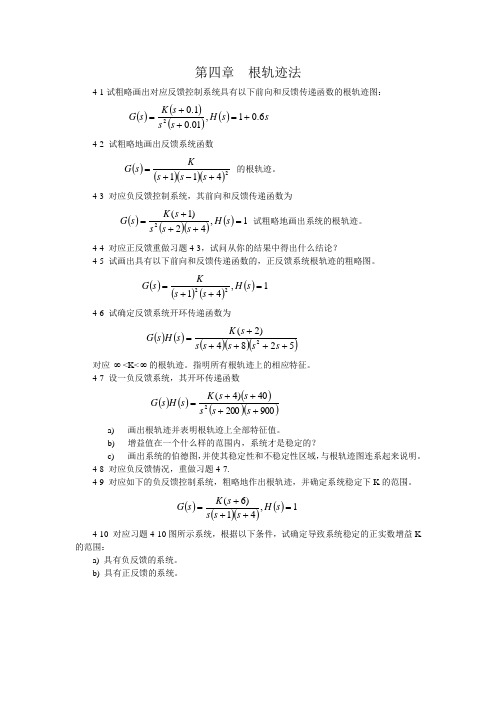
根轨迹例题题4-1 求下列各环传递函数所对应的负反馈系统根轨迹。
(1)2(2)()23g K K s W s s s +=++解1)起点:两个开环极点1211p p -=-+-=--。
终点:系统有一个 2 z -=-开环零点。
2)实轴上根轨迹区间为 (2]-∞-,。
3)渐近线计算由公式()()1118012 0,1,2,n mj i j i k n m p z n m μϕμσ==⎧+==⎪-⎪⎪⎨-⎪⎪-=-⎪-⎩∑∑ 求得根轨迹的渐近线倾角和渐近线与实轴的交点为180(12)18021μϕ+==-22021k σ--=-=- 4)求分离点,会合点 由'()()'()()0D s N s N s D s -=得223(2)(22)0s s s s ++-++=整理得2410s s ++=解得12s =--22s =-+。
由于实轴上的根轨迹在()2-∞,区间内,所以分离点应为12 3.7s =-≈-。
5)出射角计算由111180n m sc j i j i ββα-==⎛⎫=-- ⎪⎝⎭∑∑得()11809054.7144.7sc β=--=同理,2144.7sc β=- 。
根轨迹如图4-1所示。
图4-1 题4-1(1) 根轨迹图(2))22)(2()(2+++=s s s s K s W gK解1) 起点:系统四个开环极点为12340,2,1,1p p p j p j -=-=--=---=-+;终点:四个无限零点。
2) 渐近线计算由公式()()1118012 0,1,2,n mj i j i k n m p z n m μϕμσ==⎧+==⎪-⎪⎪⎨-⎪⎪-=-⎪-⎩∑∑求得根轨迹的渐近线倾角和渐近线与实轴的交点为180(12)451354o μϕ+==±± 、21114k σ+-=-=-+ 3) 分离点,会合点计算'()()'()()0D s N s N s D s -=整理得 3 (1)0s += 解得1,2,3 1s =- 4) 出射角计算由111180n m sc j i j i ββα-==⎛⎫=-- ⎪⎝⎭∑∑得()1180901354590sc β=-++=-同理,290sc β=+ 。
根轨迹示例之二:广义根轨迹(简版)

根轨迹示例-2(广义根轨迹)2009年五、(15分/150分)图5所示控制系统期望闭环极点2±。
(1) 试确定相应的K 、T 值;(2)对求出的T 值画出根轨迹,确定使系统稳定的K 值范围以及临界状态时的振荡频率。
解:(1)K=14, 12T =−(2)对12T =−开环传递函数:1(1)22()()(3)2(3)s K s G s H s K s s s s −+−==−++ 画根轨迹因为K 前面有负号,故当K 从0→∞,需要按0o 根轨迹规则作根轨迹 ⇒6,6K ω==图5 题五控制系统方块图5.(15分)单位负反馈系统的开环传递函数为24()(1)s a G s s s +=+ (1)试绘制参数a 由0→∞变化的闭环根轨迹;(2)求出系统处于临界单调衰减时以乘积形式表示的闭环传递函数。
解:(1)~3220.25()44(0.5)a aG s s s s s s ⇒==+++等效开环传递函数根轨迹如图所示。
(2)1,216S ⇒=−临界单调衰减即分离点处1,216322220.2510.074(0.5)s-0.250.25()0.250.666()/40.074(1)()()/44(0.17)(0.67)1(1)S aa s s s s s a a s a s s s s s a s s s s σσσφ=−=⇒=+∴=+++⇒××−=⇒=−+++∴==+++++Q 2由幅值条件:第三个闭环极点位于实轴111()(s+)666此时,也可以用到根轨迹中的第九条“守恒规则”(因为n-w>=2)5. (20%)已知反馈控制系统的开环传递函数为*22()()(22)(25)K G s H s s s s s =++++ *0K > 但反馈极性未知,欲保证闭环系统稳定,试确定根轨迹增益*K 的范围。
解:若反馈极性为负时,使系统闭环稳定的*K 范围为(,)a b ,而反馈极性为正时,使系统闭环稳定的*K 范围为(,)c d ,则选择*(,)K e f ∈,而(,)e f 为(,)a b 和(,)c d 的公共区间,即可保证系统闭环稳定。
第四章 根轨迹法 习题
第四章 根轨迹法4-1试粗略画出对应反馈控制系统具有以下前向和反馈传递函数的根轨迹图: ()()()()s s H s s s K s G 6.01,01.01.02+=++=4-2 试粗略地画出反馈系统函数 ()()()()2411+-+=s s s Ks G 的根轨迹。
4-3 对应负反馈控制系统,其前向和反馈传递函数为 ()()()()1,42)1(2=+++=s H s s s s K s G 试粗略地画出系统的根轨迹。
4-4 对应正反馈重做习题4-3,试问从你的结果中得出什么结论?4-5 试画出具有以下前向和反馈传递函数的,正反馈系统根轨迹的粗略图。
()()()()1,4122=++=s H s s Ks G4-6 试确定反馈系统开环传递函数为 ()()()()()5284)2(2+++++=s s s s s s K s H s G 对应-∞<K<∞的根轨迹。
指明所有根轨迹上的相应特征。
4-7 设一负反馈系统,其开环传递函数 ()()()()()90020040)4(2++++=s s s s s K s H s G a) 画出根轨迹并表明根轨迹上全部特征值。
b) 增益值在一个什么样的范围内,系统才是稳定的? c) 画出系统的伯德图,并使其稳定性和不稳定性区域,与根轨迹图连系起来说明。
4-8 对应负反馈情况,重做习题4-7.4-9 对应如下的负反馈控制系统,粗略地作出根轨迹,并确定系统稳定下K 的范围。
()()()()1,41)6(=+++=s H s s s s K s G4-10 对应习题4-10图所示系统,根据以下条件,试确定导致系统稳定的正实数增益K 的范围:a) 具有负反馈的系统。
b) 具有正反馈的系统。
习题4-10图4-11 已知反馈系统的开环传递函数*()()(1)(2)K G s H s s s s =++ 试绘制系统的根轨迹图,详细列写根轨迹的计算过程,其中包括零点、极点、渐近线及与实轴交点,根轨迹分离点及与虚轴的交点、渐近线与实轴夹角。
根轨迹绘制例题

Im 4
2 三重 极点 -4 -2 0 -2 Re
-6.65 -6
-4
2.当-∞≤kg≤0时,绘制0o等相角根轨迹。
实轴上的根轨迹区间为:[-3,-1]和[0,+∞) 渐近线:开环极点数-开环零点数=1,则该根轨迹有一条 渐进线。渐进线的倾角为: 2k 0 nm 分离(会合)点:计算方法如1。s=-6.65不在根轨迹上, 应该舍去。 s=-1.35是会合点。
实轴上的根轨迹区间为: [-4,0]
根轨迹的渐近线:开环极点与开 环零点的数目相同,该根轨迹没有 渐进线。
z2
-4
p1
Im
116.57 1 Re 0
1
2
-3 -2 实轴上根轨迹
z1
-1
1
p2
-1
分离(会合)点:令 s4 kgs ' 2 1 N( s )2 s4 N (s )s 4 s 2 s 2 s2 2 ' D ( s ) s 2 s 2 D ( s )2 s 2 2 ' ' 代入方程 N 有: ( s ) D ( s ) N ( s ) D ( s ) 0 s 2 s 4 0
根轨迹与虚轴的交点:
2 1 k ) s ( 2 4 k ) s 2 0 系统的闭环特征方程为: ( g g
劳斯阵列如下: s2 1 kg 2
s1 2 4k g 0 s0 2 0 由于kg≥0,劳斯阵列中没有全为零的行。所以,根 轨迹与虚轴没有交点。根轨迹如下:
Im 1 -1.24 -4 -3 -2 -1 0 -1 Re
2 三重 极点 -4 -2 0 -2 Re
根轨迹选择题练习
1. 设系统开环传递函数为:12*()()H(s)=
(22)
K s z G S s s s -++当附加的开环实数零点1z 趋近无穷时,对应的根轨迹图为
2. 选出下例中正确的根轨迹图是
3. 下面关于稳定性的叙述不正确的有
A. 如果闭环极点全部位于S 左半平面,则系统一定是稳定的。
B. 系统稳定只与闭环极点位置有关,而与闭环零点位置无关。
C. 附加位置适当的开环零点,可以改善系统的稳定性能。
D. 线性系统的稳定性与输入信号的类型有关。
4. 系统的瞬态响应的基本特征取决于系统()在S 复平面上的位置。
A. 开环零点
B.开环极点
C. 闭环零点
D.闭环极点
5.选出下例中正确的根轨迹图是
6.选出下例中正确的根轨迹图是
7.选出下例中正确的根轨迹图是
8.选出下例中正确的根轨迹图是
9.选出下例中正确的根轨迹图是。
自动控制_根轨迹(例题)

n
m
n
m
nm
j 1
i 1
nm
这是与实轴交点为-,斜率为 tg
(2k 1) nm
是渐近线方程。渐近线与实轴的夹角(称为渐近线的倾斜角为
k 0,1,2
( 2k 1) 的直线方程。也就 nm
180
0
n m 1
nm 2
90 0
和
实轴上的会合点和分离点的求法
由此得: D( d ) K gd N ( d ) 0 ' ' D ( ) K N ( d ) 0 d gd 即:
N ' ( s ) D( s ) N ( s ) D ' ( s ) 0 D( s ) K gd N ( s) s d
二.根据相角条件确定根轨迹上的点
设某一系统的开环零极点如图,在S 平面中的任意一点 S0 ,用相角条件可
s0
O
× p2
以判断 S0 是不是根轨迹的点。
1、从 S0 到各零极点连直线
2、用量角器量 (s0 p1 ),…等各个角 3、将量好的值代入(**)式,若等
式成立,则 S0 就是根轨迹上的点
j 1 i 1 i
当 Kg= 0 时,有 s = pj ( j =1, 2, … , n) 上式说明Kg= 0时,闭环特征方程的根就是开环极点。
将特征方程改写为:
1 Kg
(s p ) (s z ) 0
j 1 j i 1 i
n
m
当 Kg 时,有
s = zi
( i =1, 2, … , m)
z1
o
画根轨迹例题

2
D(s) s 4 5s 3 8s 2 6s K * 0
1 5
8 6
K*
6 8 K* 5 (204 25K * ) / 34 0 K*
由第一列、第四行元素为零
204 25K * 0
K * 8.16
由辅助方程
6 2 (8 )s 8.16 0 5
j
K* 0
K* 0
-4
K* 0
0
K* 0
(4)渐近线:
渐近线在横轴上的公共交点为
nm 渐近线与横轴的夹角为
a
p z
i 1 i j 1
n
m
j
4 2 4 j 2 4 j 2 4
2k 1 a 4
k 0,1, 2,3
k取0、l、2、3时,分别为450、1350、2250、3150。
例 已知系统的开环传递函数如下试绘制该系统的根轨迹图。
K* G( s) H ( s) s( s 4)( s 2 4s 20)
解 ⑴根轨迹起始于开环极点p1=0、p2=-4、p3=-2+4j、 p4=-2-4j;终止于4个无限零点(没有有限零点)。 ⑵共有4个根轨迹分支,连续且对称于实轴。 ⑶实轴上的根轨迹是实轴上由0到-4的线段。
3
s1,2 j1.095
2018/8/11
j
j1.095
3 2.3
1
0
j1.095
பைடு நூலகம்
2018/8/11
4
例
c 已知系统开环传函如下,试求出根轨迹与虚轴的交点 K c* 及相应的开环根轨迹增益的临界值 。 K* G(s) H(s) (s 1)(s 2)(s 3)
根轨迹典型习题知识讲解

根轨迹典型习题1、已知单位反馈系统的开环传递函数)1s 5.0)(1s 2.0(s k)s (G ++=,试概略绘出系统根轨迹。
解: )2s )(5s (s K10)1s 5.0)(1s 2.0(s K )s (G ++=++=三个开环极点:0p 1=,2p 2-=,5p 3-= ① 实轴上的根轨迹:(]5,-∞-, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧ππ±=π+=ϕ-=--=σ,33)1k 2(373520a a③ 分离点:02d 15d 1d 1=++++ 解之得:88.0d 1-=,7863.3d 2-(舍去)。
④ 与虚轴的交点: 特征方程为0k 10s 10s 7s )s (D 23=+++=令 ⎩⎨⎧=ω+ω-=ω=+ω-=ω010)]j (D Im[0k 107)]j (D Re[32 解得⎩⎨⎧==ω7k 10与虚轴的交点(0,j 10±)。
根轨迹如图所示。
2、已知单位反馈系统的开环传递函数)1s 2(s )1s (k )s (G ++=,试概略绘出系统根轨迹。
解: )21s (s 2)1s (K )1s 2(s )1s (K )s (G ++=++=根轨迹绘制如下:① 实轴上的根轨迹:(]1,-∞-, []0,5.0-② 分离点: 1d 15.0d 1d 1+=++ 解之得:707.1d ,293.0d -=-=。
根轨迹如图所示。
3、已知单位反馈系统的开环传递函数)3s )(2s (s )5s (k )s (G *+++=,试概略绘出系统根轨迹。
解:① 实轴上的根轨迹:[]3,5--, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+==----=22)12(02)5(320ππϕσk a a③ 分离点:5131211+=++++d d d d 用试探法可得 886.0-=d 。
根轨迹如图所示。
4、已知单位反馈系统的开环传递函数)1s (s )2s )(1s (*k )s (G -++=,试概略绘出系统根轨迹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
求得分离点为: (6)根轨迹的起始角:
s 15
因为开环有一对共轭复数极点,需求 p3、 4 处的根轨迹起始角。
p (2k 1) ( p3 zi ) ( p3 p j )
3
m
n
i 1
j 1 j 3
系统的大致根轨迹如图:
确定K值范围:与分离点s1相应的
K g s . s 1. s 4 s0.46 0.88
K K g 4 0.22
因此,若使系统在阶跃响应下为衰减振荡型,K的取值 范围应为 0.22 K 5 。
例2:已知控制系统前向通道和反馈通道传递函数分别为:
实部为零 虚部为零
5 6 = 3
k 1391
(rad/s )
k K 3.47 400
根据以上结果画出概略的根轨迹图。
例1:已知系统的开环传递函数为: K G( s) H ( s) s( s 1)(0.25s 1) (1)绘制系统的根轨迹图; (2)为使系统的阶跃响应呈现衰减形式,试确定K值范围。 解: 系统的开环传递函数为
K [例]开环传递函数为 Gk (s) s(0.05s 1)(0.05s 2 0.2s 1) ,试绘制系
统的根轨迹。
解:将开环传递函数写成绘制根轨迹的标准形式
k Gk ( s) s( s 20)(s 2 4s 20) (k 400K )
开环有四个极点:
p1 0 p2 20 p3、 4 2 4 j
Kg 4K G( s) H ( s) s( s 1)(s 4) s( s 1)(s 4)
其中
K g 4K
①开环极点0,-1,-4,它们是三条根轨迹起点。系统无有 限开环零点,故根轨迹将趋向于无穷远点。 ②根轨迹的渐近线: a 1 4 0 1.67 30
开环无零点。 按照绘制根轨迹规则的顺序求根轨迹的有关参数。 (1)开环传递函数有四个极点,故有四条根轨迹; (2)确定实轴上的根轨迹:
p3
p2
p4
p1
在实轴上(0,-20)之间为根轨迹段。 (3)根轨迹的起点:四个开环极点; 根轨迹的终点:四条根轨迹均终止于无穷远处。 (4)根轨迹渐近线:
j i
p z
(从各个零点到该极点的 矢量幅角 ) 入射角 (2k 1) (从各个极点到该零点的 (从其他零点到该零点的 矢量幅角 )
矢量幅角 )
计算根轨迹和虚轴的交点;
计算会合点和分离点:
由N' (s)D(s)- N(s)D' (s) 0求解
注意:
后两步可能不存在; 在判断大致形状时,需知道根轨迹的支数、连续性和对称性。
(2k 1) a 30
即
(k 0,1,2)
a=60 , 180 , 300
③实轴上的根轨迹区间是(-∞,-4),(-1,0) ④求根轨迹分离点 d D( s ) d [ ] [ s( s 1)(s 4)] 3s 2 10s 4 0 ds N ( s) ds
p
1
系统闭环特征方程为: s 4 24s 3 100s 2 400s k 0 将 s j 代入得:
( j)4 24( j)3 100( j)2 400( j) k 0
-24 3 400 0
渐近线与实轴的交点:
p z
j i
nm
0 20 2 4 j 2 4 j 6 40
( 2k 1) 45 , 135 渐近线的倾角: nm
(5)根轨迹的分离点:
d D(s) d 4 3 2 [ s 24 s 100 s 400s] ds N (s) ds
前面学习了根轨迹的基本概念和绘制基本准则(性质), 这里将手工绘制控制系统根轨迹的步骤罗列如下: 标注开环极点“ “ ”和零点○ 确定实轴上的根迹区间; ”;
画出n-m条渐进线。其与实轴的交点和倾角分别为:
(2k 1) ; , k 0,1,2,3... nm nm 计算极点处的出射角和零点处入射角: 出射角 (2k 1) (从其他极点到该极点的 矢量幅角 )
K ( s 1) G(s) 2 , s 4s 4 5 H ( s) s5
(1)绘制系统的根轨迹,确定使闭环系统稳定的K值范围。 (2)若已知系统闭环极点s1=-1,试确定系统的闭环传递函数。 解:(1)
G( s) H ( s)
5K ( s 1) 5K ( s 1) ( s 5)(s 2 4s 4) ( s 5)(s 2) 2
(2k 1) ( p3 p1 ) ( p3 p2 ) ( p3 p4 ) (2k 1) 116.6 12.5 90 39
(取k 0)
p3
p2
根据对称性规则: p4 39 (7)根轨迹与虚轴的交点:
p4
s1 0.46
s2 2.87
由③知s2不在根轨迹上,故s1是根轨迹的分离点。 ⑤求根轨迹与虚轴的交点
闭环特征方程为:
3 s 劳斯阵列为: s2
s3 5s 2 4s Kg 0
1 5 20 K g 5 Kg 4 Kg 0 0
s1 s
0
第一列出现零,即Kg=20时系统处于临界稳定,其对应的临 界开环增益为K=Kg/4=5。 相应的辅助方程为 即 与虚轴的交点为:
5s 2 K g 0
5s 2 20 0 s j j 2
求交点也可用如下方法: 令 s j 代入方程得: K g 5 2 j(4 2 ) 0
解得
2 4 0 2 2 K 20 K g 5 0 g