监督分类与非监督分类汇总教材
实习监督分类与非监督分类
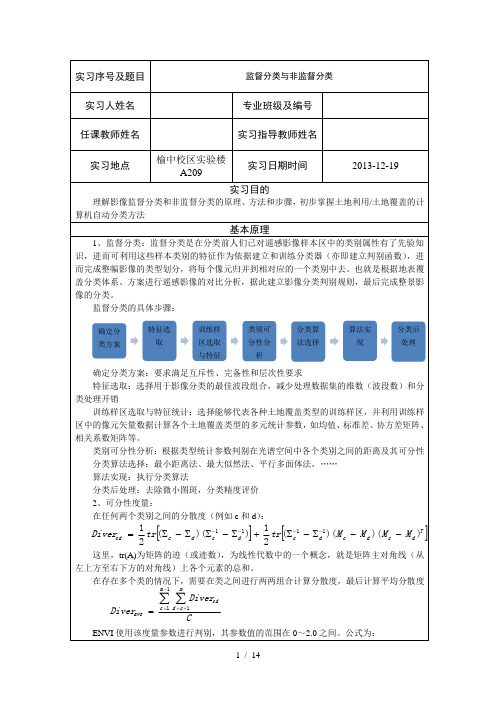
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
实习8、监督分类与非监督分类
1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigated land 水库reservoir裸地barren land 工业区industrial area滩地shoaly land 林地forest草地grassland 河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择point、polyline、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选Options的统计训练区可分性Compute ROI Separability,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classification |Supervised| Maximum Likelihood,在Set Input File对话框中导入影像。
在打开的对话框中选Select All Items,其中Set Probability Threshold设为NO,Output Rule Image设为No,选择保存路径。
②根据分类的情况修改监督分类后的地物的颜色等信息。
具体操作:在监督分类影像中的Image上选择Overlay |Classification,点击“Supervised”,选择Option |Edit class colors/name 等来修改地物的名称和颜色5. 分类精度评价,从随机采集100~200个样本点,并确保每一类别不少于10个样本;进行分类精度评价,得到分类混淆矩阵,计算Kappa系数,并对结果进行解释。
监督分类和非监督分类
影像的分类可分为监督与非监督分类。
监督分类器根据其原理有基于传统统计分析的、基于神经网络的、基于模式识别的等。
本专题以ENVI的监督与非监督分类的实际操作为例,介绍这两种分类方法。
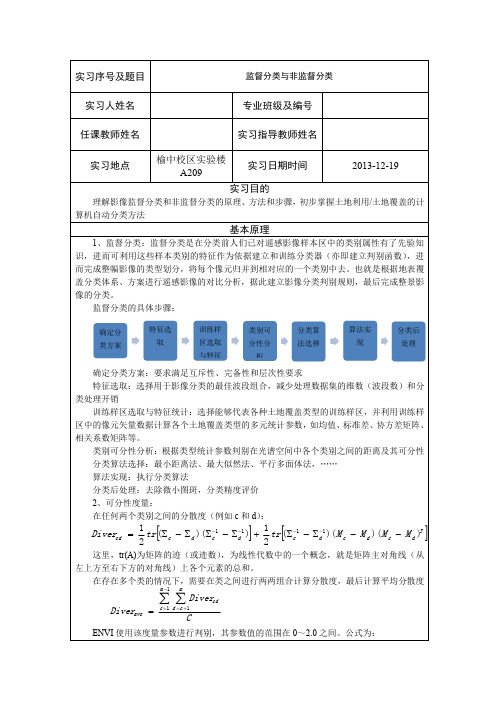
有以下内容组成:∙ ∙ ●非监督分类∙ ∙ ●监督分类∙ ∙ ●分类后处理非监督分类非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
遥感影像的非监督分类一般包括以下6个步骤:图1 非监督分类操作流程1、影像分析大体上判断主要地物的类别数量。
一般监督分类设置分类数目比最终分类数量要多2-3倍为宜,这样有助于提高分类精度。
本案例的数据源为ENVI自带的Landsat tm5数据Can_tmr.img,类别分为:林地、草地/灌木、耕地、裸地、沙地、其他六类。
确定在非监督分类中的类别数为15。
2、分类器选择目前非监督分类器比较常用的是ISODATA、K-Mean和链状方法。
ENVI包括了ISODATA和K-Mean方法。
ISODATA(Iterative Self-Orgnizing Data Analysize Technique)重复自组织数据分析技术,计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据所得的新均值,对像元进行再分类。
K-Means使用了聚类分析方法,随机地查找聚类簇的聚类相似度相近,即中心位置,是利用各聚类中对象的均值所获得一个“中心对象”(引力中心)来进行计算的,然后迭代地重新配置他们,完成分类过程。
3、影像分类打开ENVI,选择主菜单->Classification->Unsupervised->IsoData或者K-Means。
实习8、监督分类与非监督分类

操作方法及过程1. 选取研究区数据(512×512),通过目视解译建立分类系统及其编码体系根据实习要求,在遥感影像上确定并提取出了12种地物,分别是居民点、砾石、道路、河流、水稻田、水浇地、水库、裸地、工业区、滩地、林地。
同时确定土地的覆盖类型、编码以及色调。
居民点Town 砾石gravel desert道路Road 水稻田paddy land水浇地irrigat ed land 水库reservoi r裸地barrenl and 工业区industri al area滩地shoalyland 林地forest草地grassla nd河流stream2. 按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区,给出各个类别的特征统计表。
加载512*512影像,右击Image窗体,选择ROI Tool,进行ROI采集,在Zoom中选择样本区,根据地物的情况选择poin t、polylin e、polygon方式建立训练区。
3. 计算各个样本之间的可分离性。
说明哪些地物类型之间较易区分,哪些类型之间难以区分。
ROI Tool中选O p tions的统计训练区可分性Com pute ROI Separab ility,选择中卫影像,点击确定,选择所有训练区,统计J—M距离和分散度。
4. 监督分类:利用最大似然法完成分类。
①具体步骤:Classifi catio n|Supervi sed| Maximum Likelih ood,在Set Input File对话框中导入影像。
在打开的对话框中选Sele ct All Items,其中Set Probabi lity Threshol d设为NO,Output R ule Image设为N o,选择保存路径。
ENVI监督分类与非监督分类

选择classification/unsupervised/Isodata,选择子区为输入文件,,点击OK,设置参数如下图所示。
对照原影像将30种类型进行编号并改名字,改变颜色;进行相同类别的合并:选择Classification中的分类后处理post classification,选择合并同类别Combine Classes,选择之前的非监督分类影像,在输入的文件中依次选择要合并的类,在输出的文件中选择相同的类别,点击Add Combination,所有的类别合并完后点击确定即可。
原影像最大似然法进行监督分类结果监督分类的最大似然法分类结果中,主要的地物都可以被区分出来,地物分布也很清楚的展现出来,只是生成的结果又很严重的椒盐现象,分析可能是选取训练区时认为造成了误差。
缺点就是没有将结果中的颜色按照真实地物的颜色进行修改,下次在聚类统计的结果上很容易看出原本监督分类的生成结果中严重的椒盐现象消失但有些细节已经被消除看不清楚,3*3窗口与5*5窗口生成的5*5窗口的更加清楚具体, 5*5窗口将周边的面积较对影像的过滤分析生成的结果显得椒盐现象更加严重Number of Neighbors的值设置的越小,小黑点越密集象都已经消失.主要成分分析得到的结果较好,椒盐现象得到避免邻地物之间的合并,分析窗口越小,地物信息更加具体次要分析(kernal size为3*3):利用次要成分分析的影像不但没有减轻椒盐现象,反而椒盐现象更加严重,未定义的黑点更密集,并且变得更大,效果很不好.7、非监督分类结果:在进行非监督分类的时候首先将地物分成了30类,然后人工进行识别分类后最终与监督分类结果一样合并成了8类,但是最后的效果并不是很好,在非监督分类一开始就将水稻田与林地分类到一起,最后生成的结果只能区分大致的地物分布,与监督分类结果相比,非监督分类结果更粗糙.。
envi遥感图像监督分类与非监督分类
envi遥感图像监督分类监督分类,又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它就是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
使每个像元和训练样本作比较,按不同的规则将其划分到和其最相似的样本类,以此完成对整个图像的分类。
遥感影像的监督分类一般包括以下6个步骤,如下图所示:详细操作步骤第一步:类别定义/特征判别根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统;对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理。
这个过程主要是一个目视查看的过程,为后面样本的选择打下基础。
启动ENVI5.1,打开待分类数据:can_tmr.img。
以R:TM Band 5,G: TM Band 4,B:TM Band 3波段组合显示。
通过目视可分辨六类地物:林地、草地/灌木、耕地、裸地、沙地、其他六类。
第二步:样本选择(1)在图层管理器Layer Manager中,can_tmr.img图层上右键,选择"New Region Of Interest",打开Region of Interest (ROI) Tool面板,下面学习利用选择样本。
1)在Region of Interest (ROI) Tool面板上,设置以下参数:ROI Name:林地ROI Color:2)默认ROIs绘制类型为多边形,在影像上辨别林地区域并单击鼠标左键开始绘制多边形样本,一个多边形绘制结束后,双击鼠标左键或者点击鼠标右键,选择Complete and Accept Polygon,完成一个多边形样本的选择;3)同样方法,在图像别的区域绘制其他样本,样本尽量均匀分布在整个图像上;4)这样就为林地选好了训练样本。
实习三 遥感图像的监督分类与非监督分类

实验三遥感图像的监督分类与非监督分类[实验目的]1.理解遥感图像的监督分的含义;2.会使用ENVI软件对遥感图像进行监督分类。
[实验原理]在遥感图像分类中,按照是否有已知训练样本的分类依据,分类方法又分为两大类:监督分类与非监督分类。
遥感图像的监督分类是在已知类别的训练场地上提取各类别训练样本,通过选择特征变量、确定判别函数或判别式(判别规则),进而把图像中的各个像元点划归到各个给定类的分类。
遥感图像的非监督分类是在没有先验知识(训练场地)的情况下,根据图像本身的统计特征及自然点群的分布情况来划分地物类别的分类处理,事后再对已分出的各类的地物属性进行确认,也称作“边学习边分类法”。
两者的最大区别在于,监督分类首先给定类别,而非监督分类则由图像数据本身的统计特征来决定。
[实验步骤]一监督分类(数据采用njtmcorrected)监督分类技术需要在执行以前事先定义训练分类器(training classes), 训练分类器也可以用ENVI 感兴趣区(ROI)函数限定。
ENVI的监督分类技术包括平行六面体(平行管道)、最小距离、马氏距离、最大似然、波谱角度制图仪以及二进制编码方法1. “开始”->“程序”->RSI ENVI4.0->ENVI,打开ENVI4.0界面;2. 选择File > Open Image File.3. 当出现Enter Data Filename 对话框,选择要打开的文件名,再点击“OK”,在Available Bands List框里点击Load Band ,图像显示在图像显示窗口。
4. 选择“基本工具”->感兴趣区->ROI工具,弹出ROI Tool对话框。
5. 在ROI_Type菜单里选择建立感兴趣区的类型,可以选择Polygon、Polyline、point、Rectangle、Ellipse等类型。
6. 在Window栏里选择要建立感兴趣区的窗口,可以选择Image、Scroll、Zoom窗口。
监督分类与非监督分类
缺点
• 主观性; • 由于图象中间类别的光谱差异,使得训练样
本没有很好的代表性; • 训练样本的获取和评估花费较多人力时间; • 只能识别训练中定义的类别。
第 8 章 遥感图像自动识别分类
§8-4 非监督分类
§8-4非监督分类
二 非监督分类 仅凭遥感影像地物的光谱特征的分布规
律,即自然聚类的特性,进行“盲目”的 分类;
否 是
迭代次数=I或相邻两次迭代类别中心变动小于限值
否 否
σ > TS 是
确定分裂后的中心
输出
否
DIK< TC
是
确定并类后的中心
ISODATA算法过程框图
(三) 平行管道法聚类分析
它以地物的光谱特性曲线为基础,同 类地物在特征空间上表现为以特征曲线 为中心,以相似阈值为半径的管子,此 即为所谓的“平行管道”。
(二) ISODATA算法聚类分析
可以自动地进行类别的“合并”和“分 裂”,从而得到类数比较合理的聚类结 果。
迭代次数 每类集群允许
选定初始类别中心
的最大标准差
输入迭代限值参数:I,Tn, TS ,TC
集群允许的最 短距离
对样本像素进行聚类并统计ni,m,σ
每类集群至少 的点数
ni<Tn
是 取消第i类
第 8 章 遥感图像自动识别分类
§8-3 监督分类(续)
原始影像数据的准备
(二) 分类过程
图像变换及特征选择 分类器的设计
初始类别参数的确定 逐个像素的分类判别
形成分类编码图像 输出专题图
▪ 选择样本区域 植被 老城区 耕地 水 新城区
将样本数据在特征空间进行聚类
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
操作步骤
一、监督分类:
1、选取研究区数据(512×512或者1024×1024),结合GoogleEarth影像通过目视解译建立分类系统及其编码体系;
编码体系如下:
编码地物名称色调
12 水浇地irrigated land R225 G225 B150
30 草地grassland R170 G190 B030
51 河流stream R150 G240 B255
52 水库、坑塘reservoir or pond R160 G205 B240
71 沙漠sandy desert R200 G190 B170
72 砾漠 gravel desert R215 G200 B185
73 裸地及盐碱地barren land R200 G205 B200
2、按照监督分类的步骤,在影像上找出对应各个土地利用/覆盖类型的参考图斑,利用ROI工具建立训练区:
训练样本如下:
对训练样本进行统计,结果如下:
ban d7 241388.
72
320377.
44
538052.
43
808207.
37
1071346
.47
1460959
.07
1327725
.27
相关系数矩阵
ban
d1
1.00 0.99 0.97 0.93 0.83 0.69 0.76
ban
d2
0.99 1.00 0.98 0.95 0.86 0.72 0.79
ban
d3
0.97 0.98 1.00 0.99 0.92 0.79 0.86
ban
d4
0.93 0.95 0.99 1.00 0.97 0.85 0.90
ban
d5
0.83 0.86 0.92 0.97 1.00 0.93 0.95
ban
d6
0.69 0.72 0.79 0.85 0.93 1.00 0.99
ban
d7
0.76 0.79 0.86 0.90 0.95 0.99 1.00 3、对所选ROI样本进行可分离性评价,结果如下:
JM值统计表:
Jeffries-Matusita
30 12 51 52 71 72 73
30草地 1.999 1.999 2.000 1.999 1.998 1.998
12水浇
地
1.999 1.999
2.000 2.000 2.000 2.000
51河流 1.999 1.999 1.995 2.000 2.000 2.000 52水库 2.000 2.000 1.995 1.993 2.000 2.000
71沙漠 1.999 2.000 2.000 2.000 1.999 1.999
72砾漠 1.998 2.000 2.000 2.000 1.999 1.896
73裸地 1.999 2.000 2.000 2.000 1.999 1.896
分离散度统计表:
Transformed Divergence
30 12 51 52 71 72 73
30草地 1.941 2.000 1.785 2.000 2.000 2.000
12水浇
2.000 2.000 2.000 2.000 2.000 2.000
地
51河流 2.000 2.000 1.980 2.000 2.000 2.000
52水库 2.000 2.000 2.000 2.000 2.000 2.000
71沙漠 2.000 2.000 2.000 2.000 2.000 1.999
72砾漠 2.000 2.000 2.000 2.000 2.000 2.000
73裸地 2.000 2.000 2.000 2.000 2.000 2.000
分析上述可分性度量矩阵可知,各地物间JM值均在1.8以上,因此可以有效的对各地物进行区分,因此所选ROI样本很适合与此监督分类。
4、利用最大似然法对影像数据完成监督分类。
最大似然法分类后结果如下:
汇总结果,可知:
对以上分类混淆矩阵及Kappa系数结果进行分析可知,分类混淆矩阵中错分误差与漏分误差均较小且分类后Kappa系数为0.9190,总体而言,分类结果较好。
5、分类后处理(clump—sieve—majority):对分类后影像分别依次进行clump、sieve、majority处理,结果如下:
Clump后:
Sieve后:
Majority后:
对非监督分类后结果进行精度评价,结果如下:
由此精度评价结果可知,非监督分类后,影像分类总体精度为74.6265%,Kappa系数为0.6060,总体而言,影像分类效果略差,不能满足影像分析及制图需要。