风管清洁机器人机器人创新设计
中央空调管道清洁机器人的创新设计
中央空调管道清洁机器人的创新设计摘要:本文主要结合国内外的中央空调机器人的发展,讲述课题的意义和背景,其中重点介绍了中央空调管道机器人采用导向轮制作的行走方案和旋转刷的清扫方案。
同时,针对中央空调管道清洁机器人清洁收尾增加了收集装置。
对重点工作和探讨内容进行归纳总结,并对今后的研究方向做出了展望。
关键词:机械设计;中央空调;机器人;电动机;导向轮一、引言近几年来,中央空调管道的不得当清洗引起了重大关注。
由于中央空调管道设备所占面积较大,长期使用后,细菌灰尘会堆积在空调内部,而随着空调送风系统的运行,会将管道中的细菌和灰尘吹到室内,严重影响到室内空气质量,导致人们呼吸和皮肤时常出现问题。
不仅如此,灰尘的堆积导致散热片堵塞,空调的运转时间及电流成本增加,从而导致空调使用寿命减少,由于楼层结构不同,所安装的空调管道也是纵横交错,并且管道直径也会因为空间大小不同,拐角和衔接扣的清理更是人力短时间不能解决的。
因此,清洁机器人的产生不仅可以更高效地对管道进行清扫、消毒,更能够解决人力清洁所带来的不卫生难题。
因此,采用专用的清洁机器人对中央空调管道进行清洗工作。
我国2004年以来尽管研究的很多,但真正成型投入使用的并不是很多,产品和市场不成熟,而国外的相关产品大多功能单一,智能化水平低,价格又昂贵。
因此国内市场一系列低成本、高效率的机器人相继投入市场。
目前,中央空调机器人的发展趋势将是:增加机器人的适应性,能够运用与多种场景。
中央空调管道清洗机器人技术的成熟和其产品的国产化,会进一步提高我们的物资和文化生活,其研究和发展具有广阔的应用前景、重要的社会意义和经济效益二、工作原理本次设计的机器人主要用于空调管道的清洁,大体由行走机构、清扫装置、控制系统组成。
其中行走机构又包括了驱动机构和导向轮系统两个部分,驱动装置主要采用单电机驱动机器人的前轴,通过对支撑臂上的零件进行调节从而调节导向轮的间距,确保机器人在进入管道以后,两个导向轮两端与管道壁保持大约20mm的距离。
新型空调通风管道清理机器人的设计与优化
新型空调通风管道清理机器人的设计与优化摘要:近些年来,空调的广泛应用,一方面给人们的生活带来具大方便,但是另一方面也使大多数人越来越依赖空调,使空调的数量以及功能不断完善,应用范围更加的广泛,种类更加的多样化。
但是长期使用空调会对人的身体造成伤害,并且空调管道内积累的粉尘也会影响人的呼吸系统。
管道清理机器人是根据空调管道发展而来的,主要目的是为了清洗管道内的细菌等物质,但是现有的通风管道清理机器人的清理效率较低,管道适应性效能较差。
所以必须根据现有情况,根据各个工作原理去研究新型管道清理机器人,并对结构进行优化,以适应现代空调发展的要求。
关键词:空调;通风管道;机器人设计随着经济社会的发展,许多房屋内中央空调的应用也越来越广泛。
技术的更新对于中央空调来说,也扩大了其应用范围,不仅仅在商场中,而且在居民楼中,使其受到越来越多人的喜欢,但是长期使用中央空调会在管道内形成大量的累积病菌等污染物,对人体的身体造成严重的伤害。
而且空调的管道通风较差,并且人工清理的难度较大,长期积累的粉尘会对呼吸系统产生重要的影响。
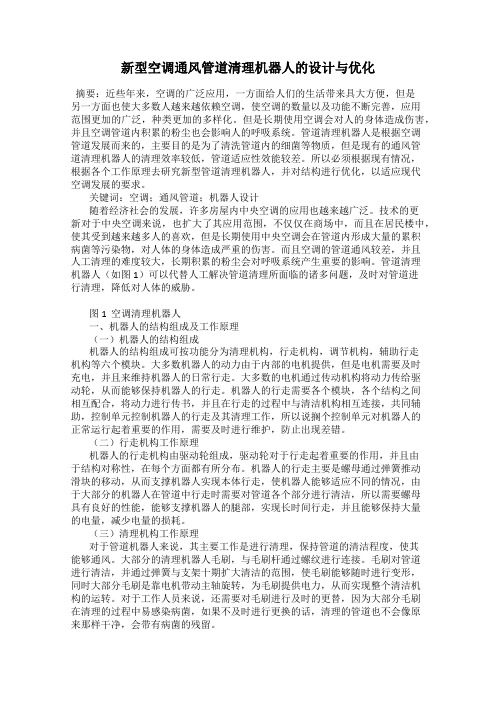
管道清理机器人(如图1)可以代替人工解决管道清理所面临的诸多问题,及时对管道进行清理,降低对人体的威胁。
图1 空调清理机器人一、机器人的结构组成及工作原理(一)机器人的结构组成机器人的结构组成可按功能分为清理机构,行走机构,调节机构,辅助行走机构等六个模块。
大多数机器人的动力由于内部的电机提供,但是电机需要及时充电,并且来维持机器人的日常行走。
大多数的电机通过传动机构将动力传给驱动轮,从而能够保持机器人的行走。
机器人的行走需要各个模块,各个结构之间相互配合,将动力进行传书,并且在行走的过程中与清洁机构相互连接,共同辅助,控制单元控制机器人的行走及其清理工作,所以说搁个控制单元对机器人的正常运行起着重要的作用,需要及时进行维护,防止出现差错。
(二)行走机构工作原理机器人的行走机构由驱动轮组成,驱动轮对于行走起着重要的作用,并且由于结构对称性,在每个方面都有所分布。
中央空调管道清洁机器人的设计

中央空调管道清洁机器人的设计引言随着中央空调系统在建筑中的应用日益广泛,其管道清洁成为一个重要的问题。
传统的清洁方法需要人工操作,耗时耗力且效率低下。
因此,设计一款中央空调管道清洁机器人成为很有必要的一项工作。
本文将介绍中央空调管道清洁机器人的设计理念、构造、工作原理以及未来发展方向。
设计理念中央空调管道清洁机器人的设计理念是基于自动化清洁的原则。
通过引入先进的传感技术和自主导航系统,实现机器人在管道内的自动运行和清洁,减少人工干预。
构造中央空调管道清洁机器人的构造主要包括机器人主体、传感器系统、清洁装置和控制系统。
机器人主体包括主要的动力系统和机械结构,传感器系统用于感知管道内的环境信息,清洁装置用于清洁管道内的污物,控制系统用于实现机器人运行的控制和协调。
工作原理中央空调管道清洁机器人的工作原理是:首先,通过传感器系统获取管道内的信息,包括管道的尺寸、形状和污物情况。
然后,根据获取的信息制定清洁路径,机器人利用清洁装置对管道内的污物进行清洁。
在整个过程中,控制系统实时监控机器人的运行状态,确保其安全和高效地完成清洁任务。
未来发展方向中央空调管道清洁机器人作为一项新兴技术,仍有许多发展方向。
首先,可以进一步完善传感器系统,提高机器人在管道内的感知能力;其次,可以优化清洁装置,提高清洁效率和效果;最后,还可以研究机器人的自主决策能力,使其更加智能化。
结论中央空调管道清洁机器人的设计是为了解决管道清洁的难题,提高清洁效率和质量。
通过不断的改进和创新,相信这一技术将在未来得到更广泛的应用。
以上是对中央空调管道清洁机器人设计的相关介绍,希望能对相关研究和应用有所帮助。
管道清灰机器人设计

目录1. 绪论 (1)1.1机器人的发展综述 (1)1.1.1 机器人定义 (1)1.1.2 我国科学家对机器人的定义 (1)1.1.3 机器人发展简史 (2)1.2管道机器人概述 (4)1.2.1 国外管道机器人发展现状 (4)1.2.2 国内管道机器人发展现状 (4)1.3管道清灰机器人系统概述 (5)1.3.1 管道清灰机器人驱动方式 (5)1.3.2 管道清灰机器人操作臂设计要求 (6)1.3.3 管道清灰机器人行走机构设计 (6)1.3.4 管道清灰机器人系统组成 (7)2.管道清灰机器人本体结构的设计和三维模型的建立 (8)2.1P RO/E NGINEER软件的介绍 (8)2.1.1 Pro/E的系统特征 (8)2.1.2 Pro/Engineer主要模块介绍 (9)2.2管道清灰机器人本体结构三维模型的建立 (11)3. 管道清灰机器人运动学分析 (23)3.1机器人操作臂类型选择 (23)3.2铲斗转角差及卸载角分析 (25)3.3机器人操作臂自由度 (26)3.4操作臂死点分析 (26)4. 管道机器人运动机构仿真 (29)4.1铲斗铲灰 (29)4.2 铲斗举升 (31)4.3 铲斗旋转 (32)结论 (34)致谢 ................................................... 错误!未定义书签。
参考文献 . (34)1. 绪论1.1 机器人的发展综述1.1.1 机器人定义在科技界,科学家会给每一个科技术语一个明确的定义,但机器人问世已有几十年,机器人的定义仍然仁者见仁,智者见智,没有一个统一的意见。
原因之一是机器人还在发展,新的机型,新的功能不断涌现。
机器人涉及到了人的概念,成为一个难以回答的哲学问题。
就像机器人一词最早诞生于科幻小说之中一样,人们对机器人充满了幻想。
也许正是由于机器人定义的模糊,才给了人们充分的想象和创造空间。
机器人主要类型:操作型机器人:能自动控制,可重复编程,多功能,有几个自由度,可固定或运动,用于相关自动化系统中。
推荐-机械手管道清洁机器人总体设计说明书全套图纸

摘要上海有中央空调的1万多栋大楼中,大多数空调机组的通风系统自运行以来,也从未做过清洗。
未清洗的集中空调内可能有颗粒物、霉菌、螨虫、细菌、军团菌、藻类等各种污染物,会给人带来烦闷、乏力、嗜睡、不快感、肌肉痛、易感冒、咽痛、头晕等诸多健康危害。
因此,本设计设计了一个小型管道清洁机器人。
管道清洁机器人的设计包括视觉系统,移动系统,清洁毛刷系统,吸尘系统和控制系统。
关键词:管道,清洁,视觉,移动,清洁毛刷,吸尘,控制ABSTRACTShanghai has central air conditioning in buildings more than 10,000 buildings. Most of the ventilation system air conditioning units from using has never cleanned. Uncleaning of central air conditioning maybe particulate, mold, mites, bacteria, Legionella, algae and other pollutants, which will bring boredom, fatigue, sleepiness, displeasure, muscle pain, mon cold, sore throat, head corona, and many other health risks. Therefore, the design designed a small duct cleaning robot. Duct cleaning robot design includes the visual system, mobile system, cleaning brush system, vacuum system and control system.Key words: pipe, cleaning, visual, moving, cleaning brush, cleaning, control目录1绪论 (1)1.1 中央空调的现状分析 (1)1.2 管道清洁机器人的技术要求 (1)2机器人的视觉系统 (2)2.1 摄像头 (2)2.2 照明灯 (3)3机器人的运动系统 (4)3.1 底板的设计 (4)3.2 驱动电机的选择与设计 (4)3.3 轮胎的选择 (5)3.4 转向机构的设计 (6)3.5 机器人移动的实现方法 (7)4机器人的清洁系统 (9)4.1清洁毛刷的设计分析 (9)4.2 旋转刷的设计及材料选择 (10)4.3 驱动电机的选择 (10)4.4 手臂的设计 (11)4.5 支撑架的设计 (11)4.6 传动带的设计 (13)4.7 带轮的设计 (14)4.8 驱动轴的设计 (16)4.9 联轴器的选择 (17)4.10 轴承、轴套等零件的选择与设计 (18)5机器人的吸尘系统 (19)5.1 吸尘系统的设计分析 (19)5.2 电机的选择 (19)5.3 叶片的设计 (20)5.4 外壳的设计 (21)5.5 其他零件的设计 (22)6机器人的控制系统 (23)6.1 控制系统的设计概述 (23)6.2 控制系统各硬件的介绍 (24)6.3 电路板的设计 (28)6.4 上位机的控制面板设计 (30)6.5 单片机的编程 (31)6.6 系统抗干扰措施 (33)结论 (34)参考文献 (35)致谢 (36)1 绪论1.1 中央空调的现状分析“20XX中国国际工业博览会科技论坛——公共场所卫生与标准化国际研讨会”在沪举行。
集中空调管道自动清洁机器人设计
集中空调管道自动清洁机器人设计摘要:目前我国的中央空调大多采用“间接式盘管换热”,这种设计会在凝结水盘内形成高湿环境,如果施工不当或设计不周,甚至会造成凝结水聚积。
一旦室外空气中致病微生物通过新风入口由灰尘带入,或者室内空气中的致病微生物从回风口盘旋而上,就会粘附在盘管上,沉降在凝结水盘中。
再加上中央空调生产企业为价格竞争,在过滤设备上“偷工减料”,造成大量垃圾有隙可入,中央空调管道内成了许多有害颗粒和灰尘、病菌、病毒、尘螨及碳放射物的藏身之所,威胁着人类的健康。
这个忧虑已唤起社会有识之士,政府部门对中央空调管道清洁的重视。
为此我们研制了专门清理空调管道的机器人解决清洁问题。
关键词:机器人,自动,清洁,设计,集中空调Central air conditioning pipeline the design ofautomatic cleaning robotAbstract:At present, most of China's central air-conditioning the use of "indirect coil heat exchanger," This design will be the formation of condensation water tray and humid environment, if the improper construction or design of ill-conceived, and even lead to accumulation of condensate. Once the outdoor air in pathogenic micro-organisms through the new entrance by the dust into the air, or indoor air in the back of pathogenic micro-organisms from the air and circled, we will adhere to the coil, the settlement after the condensation of water. In addition, central air-conditioning for the price competitiveness of manufacturing enterprises, in the filtration equipment to "jerry-building", resulting in a huge amount of rubbish into the foul play, the central air-conditioning duct in many harmful particles and dust, bacteria, viruses, dust mites and the carbon radiation hideouts, a threat to human health. Arouse public awareness of the concerns people have, the government departments of the central air-conditioning duct cleaning attention. To this end, we developed a special air-conditioning pipe cleaning robot to solve the problem of cleanliness.Keywords:Robots, automatic, clean, design, central air conditioning目录题目 (Ⅰ)摘要及关键词 (Ⅱ)1绪论 (1)1.1设计题目、意义及要求 (2)1.2国外、国内研究概况 (3)1.3市场需求预测 (4)1.4设计的重点和难点 (5)2总体方案设计 (8)2.1机器人移动载体方案设计 (9)2.1.1总体方案设计 (10)2.1.2传动方案设计 (11)2.2撑紧机构方案设计 (12)2.3机器手方案设计··············································2.3.1自由度分配方案设计·······································2.3.2关节传动方案设计··········································3具体设计计算3.1移动载体传动计算3.1.1左右驱动轮传动计算3.1.2后万向轮传动计算····································3.2撑紧气动系统的设计计算3.2.1气缸的选择··············································3.2.2气动辅助元件和回路的选择设计···················3.3机械手的具体设计计算·································3.3.1电机的选择及传动比的分配·································3.3.2传动齿轮、蜗轮蜗杆的尺寸计算······················3.4轴的设计、计算与校核·································3.5轴承的寿命计算............................................4结构设计......................................................参考文献.. (17)致谢 (18)附录 (19)1 绪论1.1 设计题目、意义及要求本次设计题目是集中空调管道自动清洁设备设计(轮式结构)。
中央空调管道清洁机器人的设计2

衢州学院毕业设计〔论文〕题目:中央空调管道清洁机器人的设计作者:童顺丙系〔部〕:机电控制工程学院专业班级:机械设计与制造08级〔1〕班指导教师:田敬职称:讲师二O一一年一月十八日中央空调管道清洁机器人的设计摘要本次设计的机器人用于污染的中央空调管道的清洁,整体结构主要由行走机构、清扫机构和监视控制系统三局部组成,行走机构又分为驱动机构、导向轮系统两局部。
驱动方式为单电机驱动机器人前轴。
在清扫之前,通过调整支撑臂上的螺钉来调节两个导向轮的横向距离,保证机器人处于管道中央时导向轮两端距管道壁各有约20mm。
清洁工作主要由旋转刷系统完成,旋转刷由气动马达驱动,与气动马达相连的刷杆采用伸缩式结构,可以进行长度调节;旋转刷头可拆卸并且有不同的材料和尺寸系列,整个装置可以进行俯仰调整,从而保证在管道都能彻底清扫到管道的边角和顶部。
在清扫过程中,利用气动马达吹出的高压空气将扫落的灰尘吹向前方,便于抽风机抽出。
清洁过程中,通过监视系统可以方便的对清扫情况进行实时监控,当出现清扫效果不理想时可以操纵机器人后退再清扫一次。
关键字:中央空调管道,清洁机器人,马达,旋转刷目录第一章概述 (1)课题的背景及意义 (1)机器人开展现状及趋势 (2)国内领先水平的管道清洁机器人 (2)中央空调管道清洁机器人开展趋势 (3)1.3本课题的设计任务 (3)第二章中央空调管道机器人系统设计 (4)工作原理及组成 (4)机器人设计原那么 (5)2.3整体方案选择 (6)第三章行走机构设计 (8)机器人驱动机构 (8)电机的选择 (8)传动齿轮的设计 (9)传动轴的设计 (14)导向轮系统 (17)导向轮系统原理 (17)电机的选取 (17)传动带的选择 (18)导向轮的设计 (20)第四章清扫机构 (23)清扫方案确定 (23)旋转刷系统主要构件 (24)构件的选择 (24)气动马达的选择 (24)旋转刷的设计 (26)第五章监视控制系统 (28)摄像头的选择 (28)摄像头的固定和调整 (28)监视器 (29)照明装置 (29)灰尘收集装置 (30)第六章总结 (32)参考文献 (33)谢辞 (32)第一章概述课题的背景及意义随着当今社会的开展,空调通风系统在日常生活中发挥着越来越重要的作用。
中央空调管道清洁机器人机构设计毕业设计
中央空调管道清洁机器人机构设计一、课题训练内容本课题基于国内外已经取得的科研成果,针对中央空调矩形通风管道系统的特点作了深入的分析和论证,在查阅和掌握大量有关文献的基础上,针对矩形的空调管道提出了管道机器人的机构设计方案。
本课题训练内容:1.移动载体的设计﹑撑紧装置的设计﹑机械手的设计2.零件设计计算以及强度校核3.对机器人在转弯时的通过性进行了分析二、设计(论文)任务和要求(包括说明书、论文、译文、计算程序、图纸、作品等数量和质量等具体要求)论文任务:针对矩形的空调管道设计管道清洁机器人。
论文要求:1.设计说明书按《武汉科技学院毕业设计(论文)格式模板》要求书写。
2.译文见附页。
3.程序要求框图详细完整,硬件图纸完备,程序清单作为附页附在论文后,程序及电子文档刻成光盘与报告同时上交。
4.设计指标需考虑技术经济性要求。
三、毕业设计(论文)主要参数及主要参考资料主要参数:机器人车体长为501mm,宽438mm,高为294mm,车体加上机械手附带毛刷总长为1281mm;机械手总长为水平最高行进速度:1m/s;垂直攀爬速度:100mm/s;垂直攀爬载重:10kg;回转半径:0;机械手自由度:4;监视器回转速度:2度/秒;监视器水平回转范围:360°;监视器俯仰回转范围:240度。
主要参考资料:[1] GB/T 19210-2003.空调通风系统清洗规范[S].中国标准化,2003,(9):66-67[2] 甘小明,徐滨士,董世运等.管道机器人的发展现状[J].机器人技术与应用,2003,(6):5-10[3] 龚振邦等编著.机器人机械设计[M].北京:电子工业出版社,1995[4] 濮良贵,纪名刚等编著.第8版.机械设计[M].北京:高等教育出版社,2005[5] 孙桓,陈作模,葛文杰等编著.第7版.机械原理[M].北京:高等教育出版社,2006[6] 宋章军,陈恳,杨向东等.通风管道智能清污机器人MDCR-I的研制与开发[J].机器人,2005,27(2):142-146[7] 韩晓明,车立新,谢霄鹏等.中央空调管道清扫机器人的设计[J].机械,2005,32(1):39-41[8] 谢文彬,杨建国,李蓓智等.管道检测机器人的研制[J].机械工程师,2005,(1):16-18四、毕业设计(论文)进度表武汉纺织大学毕业设计(论文)进度表注:1.本任务书一式两份,一份院(系)留存,一份发给学生,任务完成后附在说明书内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
风管清洁机器人机器人创新设计标准化管理部编码-[99968T-6889628-J68568-1689N]中央空调通风管清洁机器人机器人创新设计机制083沈鑫随着我国国民经济和城市建设的快速发展,中央空调已成为改善人们工作与生活环境的必备设施目前全国共有上百万台中央空调亟待清洁保养,其中相当一部分中央空调的通风系统从未进行过彻底的清洁,清洁面积大且纵横交错的中央空调通风管道已经成为长期的卫生死角,由此造成的室内空气污染问题严重影响着人们的身体健康尤其在非典、禽流感、H1N1等疫情发生之后,人们对这一问题更加关注,政府也陆续出台了相关的清洁规范,费时费力且清洁效果不佳的传统人工清洁方式已不能满足现实的需要,利用机器人进行清洁的空调清洁业正在悄然兴起,但就目前而言,中央空调风道清洁机器人市场却基本上被价格昂贵的外国产品占据,这些外国产品动辄几十万,多则上百万,使一般的企业难于承受。
因此自主研发高性价比的中央空调风道清洁机器人对促进我国中央空调风道清洗行业的发展,改善室内空气质量提高人民生活和健康水平等具有积极的意义。
在西方一些发达国家,中央空调清洁业已发展了几十年,形成了一个巨大的产业,有着比较成熟的清洁机器人技术。
尽管国外清洗机器人技术先进性能优良,但由于不是针对国内风道状况而设计,在清洁国内的风道时往往效果不甚理想。
国内一些单位提出了自己的中央空调风道清洁机器人设计及方案,但面对国内尺寸规格变化万千的风道,在适应性和清洁的彻底性方面还显欠缺针对上述实际问题,文中提出了一种新型的清洁机器人系统。
1机器人总体方案1.1系统清洁方案设计为节约建筑面积,国内建筑物的中央空调风道绝大部分设计成扁平矩形截面,且尺寸规格属非标产品,给风道清洁带来困难。
在进行风道清洁作业时,目前的清洁机器人需要经常更换不同尺寸的毛刷,操作繁琐,而且在两种不同尺寸风道的过渡处遇到毛刷与风道宽度不同的情况时必然会存在清洗死角,影响清洁效果文中设计的清洁方案采用横向俯仰二维运动拟合矩形清洁轨迹清洁风道,改变了现有清洁机器人只能作毛刷一维俯仰运动的现状,其工作原理如图1所示,该方案在毛刷旋转清洁风道时,如图1a中step1和step3所示,可以实现清洁臂的俯仰运动,同时还可以实现横向运动,如图1a 中step2和step4所示。
因而如图1b所示,机器人可根据风道大小对清洁臂俯仰和横向两个运动进行轨迹拟合,形成矩形清洁轨迹这样就使得清洁机器人在不更换毛刷的情况下,实现对不同尺寸风道的无死角清洁在保证风道内部4个面上的每一个点均能被清洁毛刷清洁至少一次的前提下,将矩形清洁轨迹与机器人行进驱动电机的运动再进行拟合,如图1所示,在横向俯仰二维运动拟合矩形清洁轨迹的一个周期内,保证机器人行走距离s小于毛刷清洁宽度d,形成渐进式矩形螺旋清洁轨迹,实现对风道的无死角清洁。
1.2系统组成中央空调风道清洁机器人由清洁机器人本体电控系统和控制软件3部分组成,如图2所示,电控系统又包括工控机和电控箱。
1.2.1清洁机器人本体清洁机器人本体用于对风道实施清洁,并收集清洁下来的污物,同时将清洁的过程和效果通过实时视频监控向用户进行反馈清洁机器人本体包括移动机构清洁机构检测和消毒装置,实现了对风道进行清洁检测和消毒的一体化作业,具有功能齐全运动灵活操作简便的特点。
1.2.2电控系统电控系统结构如图3所示,由工控机与电控箱组成,其中工控机部分由工业PC,PCI 总线运动控制卡和视频采集卡组成,电控箱部分由开关电源和各电机驱动器组成在工作过程中,电控系统根据控制指令控制机器人行进驱动电机二维运动平台驱动电机清洁毛刷驱动电机和摄像头驱动电机进行相应的运动,同时计数除清洁毛刷驱动电机外各电机上编码器的脉冲信号,将数值存储在相应的寄存器中,并将摄像头视频信号和二维运动平台位置传感器信号反馈给控制软件,从而实现清洁机器人各种预定的运动。
1.2.3控制软件控制软件采用编程,界面友好,操作方便,实现了对清洁机器人的实时控制软件界面能将摄像头反馈的视频信号进行实时显示,通过观察视频图像,操作人员可以对清洁机器人所处状态进行判断,从而控制清洁机器人进行前进、后退、差速转向、二维运动平台横向俯仰单步运动,自动拟合矩形螺旋清洁轨迹,自动导向,摄像头旋转和摆动搜索等运动。
2清洁机器人本体设计清洁机器人本体,其采用模块化设计,主要包括:移动机构、清洁机构、检测装置和消毒装置。
2.1移动机构设计国内的中央空调风道内部底面绝大部分为坚硬平坦且较为粗糙的水泥表面,仅在不同尺寸规格风道间的过渡处会有斜坡面出现,所以清洁机器人的移动机构采用简便易行的四轮结构,前轮为主动轮,采用独立驱动,即由两个步进电机分别驱动左右两个前轮,使得清洁机器人能够灵活地实现前进和两轮差速转弯,控制简单;后轮采用万向轮式结构,使得清洁机器人能够在风道内灵活地实现后退车轮采用防滑橡胶轮,可以达到清洁机器人在风道内自由移动而不至于打滑的要求。
2.2清洁机构设计清洁机构是清洁机器人的核心部分,包括矩形螺旋清扫装置。
程控往复式吸尘清障装置和清洁毛刷,能够实现对不同尺寸的矩形风道进行无死角清洁,并能收集清洁下来的污物和灰尘,以便进行统一处理。
2.2.1矩形螺旋清扫装置设计矩形螺旋式清扫装置用于拟合矩形清洁轨迹,如图6所示,由横向运动平台和俯仰运动平台组成横向运动平台由齿轮、齿条、横向驱动电机、滚动导轨组成,其中滚动导轨和齿条固定在清洁机器人机架上,直齿轮与齿条啮合,并通过D形孔与横向驱动电机输出轴相连,横向驱动电机安装在横向移动平台架上,通过带动齿轮旋转,实现了移动平台横向运动清洁臂俯仰运动平台由滑轮、绕线轮、柔性拉索俯仰驱动电机、清洁臂和清洁臂转轴组成。
其中俯仰驱动电机通过D形孔与绕线轮相连,绕线轮通过滑轮缠绕柔性拉索,使清洁臂绕清洁臂转动轴做俯仰运动,实现了清洁毛刷俯仰运动。
2.2.2程控往复式吸尘清障装置设计往复式吸尘清障装置,主要包括撮箕和吸尘器两部分,其中撮箕与二维运动机构中的横向运动平台架通过螺钉固联,在清洁机器人拟合矩形螺旋清洁轨迹清洁风道时,撮箕随清洁毛刷同步左右往复运动。
通过毛刷驱动电机带动毛刷旋转可将风道内清洁下来的污物扫入撮箕中,如果中途遇到较大的污物,如老鼠尸体等,清洁机器人可以像推土机一样,用撮箕将污物由风道出风口推出,克服了现有清洁机器人难于清理风道内较大污物的弊端清洁机器人后部装有吸尘器,撮箕后方设有随撮箕同步运动的吸尘口,可以与清洁毛刷同步运动,将清洁下来的灰尘吸入,实现吸尘功能基于以上功能,清洁机器人实现了对风道内不同种类污物的收集2.2.3清洁毛刷设计清洁毛刷如图8所示,其安装在清洁臂前端,采用圆柱形设计,端面采用碗状曲面,以提高毛刷的清洁效果,毛刷采用220V双轴交流电机直接驱动,毛刷与电机输出轴间采用D形孔连接,并安装有3根调整螺钉,以调整毛刷与电机轴的同轴度该设计保证了清洁毛刷在清洁风道壁时转速与输出力矩间有较大的刚度,使得毛刷能在不同清洁阻力的作用下转速变化不大,即在风道内管壁积灰程度不同的情况下依然能保证毛刷良好的清洁效果,同时去掉了毛刷与驱动电机间的动力传动装置,简化了设计,考虑到清洁臂的平衡问题,清洁臂后端应加适当配重。
3矩形螺旋轨迹自动拟合和自动导向为了增强清洁机器人的适应能力和通用性,必须使其能够对不同尺寸风道自适应,由于清洁机器人采用了矩形螺旋清洁方式清洁风道,因此必须要解决矩形螺旋的自动拟合问题和机器人在风道内部的自动导向问题。
自动导向功能的实现清洁机器人自动导向功能分为微调整和粗调整两个部分。
1微调整微调整主要用于直道情况,由控制软件定时查询计数移动机构两驱动电机编码器脉冲的寄存器的数值,如两数值偏差大于一阈值n时,则控制软件向数值较小的寄存器对应的电机多发送n个脉冲,从而保证两驱动轮行走距离相同。
2粗调整粗调整由控制软件采集清洁机器人撮箕两侧碰撞开关信号和计数编码器脉冲的寄存器的数值,进而对清洁机器人进行乒乓控制如图10所示,当清洁机器人处于弯道时,二维运动机构拟合矩形清洁轨迹,则行进一段距离后撮箕上的碰撞开关势必与风道壁碰撞,从而向控制软件发出到位信号,控制软件立即使二维运动机构的横向驱动电机反向运动并记录下此时计数横向驱动电机和移动机构驱动电机编码器脉冲的寄存器的数值n1和n2,其中n1为横向移动平台距离中点位置的脉冲数,n2为碰撞开关前后两次碰撞之间移动机构所行走的脉冲数清洁机器人处于直道时与弯道的情况类似,由以上分析可知,通过碰撞开关的碰撞信号和寄存器中的数值能够计算出清洁机器人偏离风道中心线的角度信息,从而根据该角度信息控制清洁机器人两驱动轮差速转向,使得清洁机器人中心线始终跟踪风道中心线,实现自动导向。
基于清洁机器人矩形螺旋轨迹的自动拟合和自动导向功能,清洁机器人就可以在风道中实现自动清洁。
4小结提出了一种新型的矩形螺旋清洁方式和往复式污物收集方式对中央空调风道进行清洁,解决了风道清洁作业中易遗留死角的问题在此基础上,对清洁机器人的移动机构清洁机构检测装置和消毒装置进行了设计,并对清洁机器人矩形螺旋轨迹自动拟合和风道内自动导向问题提出了解决方案,实现了机器人在。
风道内的自动清洁通过实验测试证明该设计方案符合对中央空调风道进行清洁作业的性能要求,且机器人结构简单,自动化程度高,适用范围广,成本不到外国同类产品的30%,达到了预期的设计效果。
参考文献[1]孙方明,张学发,刘沛,等.中央空调通风道系统的清洗[J].清洗世界,2007,23(6):36-38.[2]杨雄.风管清洗机器人国产化研究及应用[J].清洗世界,2004,20(11):37-40.[3]李德福.空调通风清洗规范的制定和理解[J].清洗世界,2004,20(5):32-39.[4]崔建波,高丽萍.集中空调风道清洗现状与前景分析[J].清洗世界,2004,20(9):21-25.[5]2009-05-13.[6][7]李俊,唐志伟,吴玉庭,等.风道清洁机器人系统的设计优化与工程测试[J].工程热物理学报,2006,27(2):328-330.。