2004年东南大学自动控制原理真题
04级自动控制原理试卷参考答案
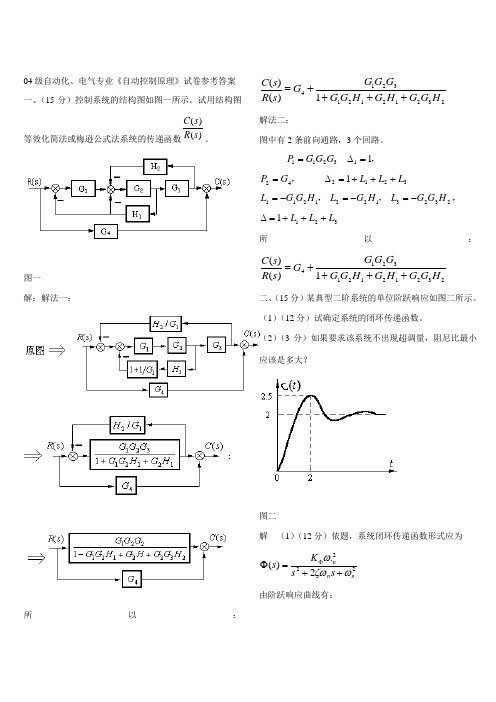
04级自动化、电气专业《自动控制原理》试卷参考答案一、(15分)控制系统的结构图如图一所示。
试用结构图等效化简法或梅逊公式法系统的传递函数) () (sRsC。
图一解:解法一:所以:2321212132141)()(HGGHGHGGGGGGsRsC++++=解法二:图中有2条前向通路,3个回路。
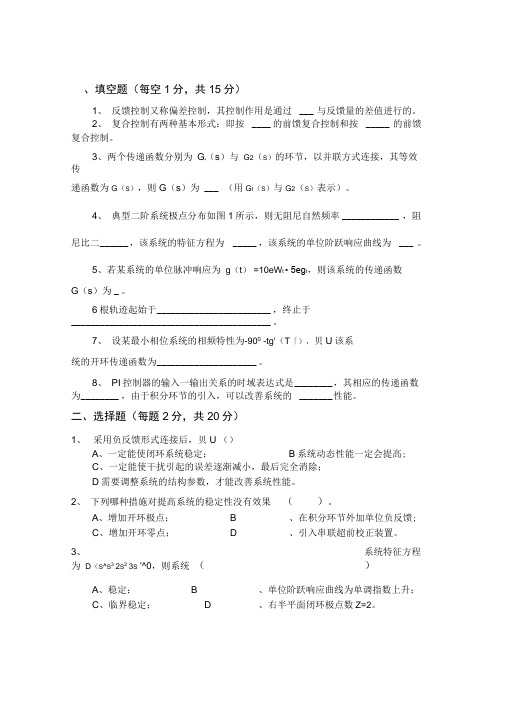
,113211=∆=GGGP,42GP=32121LLL+++=∆,,,23231221211HGGLHGLHGGL-=-=-=3211LLL+++=∆所以:2321212132141)()(HGGHGHGGGGGGsRsC++++=二、(15分)某典型二阶系统的单位阶跃响应如图二所示。
(1)(12分)试确定系统的闭环传递函数。
(2)(3分)如果要求该系统不出现超调量,阻尼比最小应该是多大?图二解(1)(12分)依题,系统闭环传递函数形式应为2222.)(nnnssKsωζωω++=ΦΦ由阶跃响应曲线有:21)(lim )()(lim (00==⋅Φ=Φ=∞Φ→→K s s s s R s s c s s )⎪⎪⎩⎪⎪⎨⎧=-===-=--o oo o n p e t 25225.221212ξξπσζωπ 联立求解得 ⎩⎨⎧==717.1404.0n ωζ,所以有95.239.19.5717.1717.1404.02717.12)(2222++=+⨯⨯+⨯=Φs s s s s (2)(3分)如果要求该系统不出现超调量,阻尼比最小应该是1,即1=ζ。
三、(10分)已知单位反馈系统的结构图如图三所示,试求系统的静态位置误差系数、静态速度误差系数和静态加速度误差系数。
解 系统开环传递函数为)1()12(10)(2++=s s s s G图三∞==→)(lim 0s sG K s v 10)(lim 20==→s G s K s a四、(15分) 单位反馈控制系统的开环传递函数如下, (1)(10分)试概略绘出系统根轨迹。
《自动控制原理》习题及解答04Ed

第四章习题及答案4-1 系统的开环传递函数为)4)(2)(1()()(*+++=s s s K s H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图解4-1所示。
对于1s = -1+j 3,由相角条件=∠)()(11s H s G=++-∠-++-∠-++-∠-)431()231()131(0j j jππππ-=---6320满足相角条件,因此1s = -1+j 3在根轨迹上。
将1s 代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=j j j K s H s G )(解出 : *K =12 ,K=238*=K4-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
解 根轨如图解4-2所示:4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G⑵ )3)(2()5()(*+++=s s s s K s G⑶ )12()1()(++=s s s K s G解 ⑴ )15.0)(12.0()(++=s s s Ks G =)2)(5(10++s s s K系统有三个开环极点:01=p ,2p = -2,3p = -5 ① 实轴上的根轨迹:(]5,-∞-, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=--=πππϕσ,33)12(373520k a a③ 分离点:021511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。
④ 与虚轴的交点:特征方程为 D(s)=01010723=+++K s s s令 ⎩⎨⎧=+-==+-=010)](Im[0107)](Re[32ωωωωωj D K j D 解得⎩⎨⎧==710K ω与虚轴的交点(0,j 10±)。
东南大学田玉平自控原理参考-答案~2

化简得:
2.9
化简得:
2.10求信号流图的传递函数
(a)
解:有6个前向通道:
共有三个回路,分别为:
(b)
共有4条前向通道,分别为:
共有9条回路,分别为:
(c)
共有2条前向通路,分别是:
共有6条回路,分别是:
(d)
有4条前向通道,分别是:
当 ,可得K=6.6
所以
2.16设三个最小相位系统的折线对数幅频特性
(1)写出对应的传递函数
(2)绘出对数相频曲线和幅相曲线。
(a)解:比例环节、两个惯性环节构成,传递函数为:
G(s)= ,G(jw)= ,
由伯得图可得20lgK=40;K=100;
(b)解:积分环节、惯性环节、一阶微分环节构成
传递函数为:
转折点为1,10;
相频特性: =-0.1w- -arctanw-arctan0.1w
当截止频率w =5rad/s时,|G(jw)|=1,
20lgK-20lgw| -20lgw| =0
K=25;
2.15
解:通过作图,得到三个转折点分别为(0.48,20.5),(3,-10)和(8,-17.5),
因此, , , ,可写出如下传递函数:
2.14 (1) G(jw)= =
幅频特性:|G(jw)|=
L(w)=20lg|G(jw)|=20lg
转折点为5,50.
相频特性: = -arctan
当截止频率w =5rad/s时,|G(jw)|=1,所以增益K= ,
(2) G(jw)= =
幅频特性:|G(jw)|=
L(w)=20lg|G(jw)|=20lg
自动控制原理四套经典试题及答案剖析
、填空题(每空1分,共15分)1、反馈控制又称偏差控制,其控制作用是通过___ 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按____ 的前馈复合控制和按_____ 的前馈复合控制。
3、两个传递函数分别为G i(s)与G2(S)的环节,以并联方式连接,其等效传递函数为G(S),则G(s)为 ___ (用G I(S)与G2(S)表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率____________ ,阻尼比二______ ,该系统的特征方程为 _____ ,该系统的单位阶跃响应曲线为___ 。
5、若某系统的单位脉冲响应为g(t) =10eW t • 5eg t,则该系统的传递函数G(s)为_ 。
6根轨迹起始于________________________ ,终止于__________________________________________ 。
7、设某最小相位系统的相频特性为-900 -tg'(T「),贝U该系统的开环传递函数为_____________________ 。
8、PI控制器的输入一输出关系的时域表达式是________ ,其相应的传递函数为________ ,由于积分环节的引入,可以改善系统的_______ 性能。
二、选择题(每题2分,共20分)1、采用负反馈形式连接后,贝U ()A、一定能使闭环系统稳定;B系统动态性能一定会提高;C、一定能使干扰引起的误差逐渐减小,最后完全消除;D需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果()。
A、增加开环极点; B 、在积分环节外加单位负反馈;C、增加开环零点; D 、引入串联超前校正装置。
3、系统特征方程为D(S^S32S23S '^0,则系统()A、稳定; B 、单位阶跃响应曲线为单调指数上升;C、临界稳定; D 、右半平面闭环极点数Z=2。
4、系统在r (t )二t 2作用下的稳态误差e ss 二::,说明( )B 、系统不稳疋; D 、闭环传递函数中有一个积分环节 5、对于以下情况应绘制0°根轨迹的是(A 、型别 v ::: 2 ; C 、输入幅值过大;6开环频域性能指标中的相角裕度对应时域性能指标()A、超调二%B、稳态误差e ssC、调整时间t s三、(8分)试建立如图3所示电路的动态微分方程,并求传递函数。
2001年东南大学自动控制原理真题

东南大学二00 一年攻读硕士学位研究生入学考试试卷一、图为简单电压调节器,在发电机的输出端用一个电位器给出反馈电压K v o ,K为常数(K1),该电位器的电阻足够高,以致可假设它可以吸收的电流可以忽略。
放大器的增益为20V/V,发电机增益K g为50V/A(励磁电流)参考电压V r =50V。
(1)画出当发电机供给一个负载电流时的系统方框图,并写出每个方块的传递函数。
(2)系统工作于闭环状态(即S闭合),已知发电机的稳态空载端电压为250V, 求此时K的值。
通过30A的稳态负载电流时,引起的端电压的变化是多少?恢复到250V的发电机电压,需要多大的参考电压?(3)系统运转在开环状态下(即S断开),为获得250V的稳态空载电压,需要多大的参考电压?当负载电流为30A时,端电压如何变化?二、设某系统的开环传递函数为G0(s)=空,试求使闭环系统稳定的K的取s值范围。
三、设系统的状态方程为x = |0 1L + L试求当-3一 \(1)U ( t ) =S (t )(2)u (t) =1 (t)时系统的状态响应x (t )。
(假设初始状态为零)四、如图所示的一阶采样系统中,ZOH弋表零阶保持器,求闭环系统的脉冲传递函数。
为使系统保持稳定,积分器的增益A的范围如何? ( T为采样周期)五、某最小相位系统的折线对数幅频特性如图所示,试写出它的传递函数,并大致画出其对数相频特性曲线。
六、已知系统的状态方程为x=Ax Bu。
设P为非奇异常数阵,已知A =P」AP二A 11 A12,B = P A B 1,其中A 11和B1的行数均为n1,而且||A 21 A 22 .|L 0rank ( B J =n’。
试证明(A,B)能控的充要条件是(A 22,A可)能控。
七、已知线性定常系统的状态转移矩阵为⑴=3S2t Sint,求系统矩阵A。
|| sin 2t cost八、已知非线性系统如图所示,其线性部分的频率特性G(jw )及非线性部分的负倒特性-1/N(E)如图所示(1)试确定当初始误差E在①A点②B点③C点④D点⑤E点时C (t )的运动情况(2)将上述分析结果在以e为横坐标,e为纵坐标的相平面上定性的表示出来(设原点为焦点,有极限环时原点为中心点)。
《自动控制原理》试题(卷)与答案解析(A26套)

《⾃动控制原理》试题(卷)与答案解析(A26套)⾃动控制原理试卷A(1)1.(9分)设单位负反馈系统开环零极点分布如图所⽰,试绘制其⼀般根轨迹图。
(其中-P 为开环极点,-Z ,试求系统的传递函数及单位脉冲响应。
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所⽰。
K 表⽰开环增益。
P 表⽰开环系统极点在右半平⾯上的数⽬。
v 表⽰系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C,3==p v (a ),0==p v (b )2,0==p v (c )题4图题2图5.(15分)已知系统结构图如下,试绘制K 由0→+∞变化的根轨迹,并确定系统阶跃响应分别为衰减振荡、单调衰减时K 的取值范围。
6.(15分)某最⼩相位系统⽤串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所⽰,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
7.(15分)离散系统如下图所⽰,试求当采样周期分别为T=0.1秒和T=0.5秒输⼊)(1)23()(t t t r ?+=时的稳态误差。
8.(12分)⾮线性系统线性部分的开环频率特性曲线与⾮线性元件负倒数描述曲线如下图所⽰,试判断系统稳定性,并指出)(1x N -和G (j ω)的交点是否为⾃振点。
参考答案A(1)1、根轨迹略,2、传递函数)9)(4(36)(++=s s s G ;单位脉冲响应)0(2.72.7)(94≥-=--t e3、 21,21,21><≠K K K 4、6425316324215313211)()(G G G G G G G G G G G G G G G G G G s R s C ++++= 642531632421653111)()(G G G G G G G G G G G G G G G G G s R s E +++-= 5、根轨迹略。
东南大学550自动控制原理考研真题答案

东南大学550自动控制原理考研真题答案
1.若在电磁控制系统中,负反馈环节的反馈信号Vf与控制量Vc成正比,请问此反馈为()
A.正反馈
B.零反馈
C.负反馈
D.不可判断
答案:C.负反馈
2.在经典控制理论中,若系统各参数保持不变,而系统的控制对象增大,那么系统的稳定性会()
A.增强
B.减弱
C.不变
D.不可判断
答案:B.减弱
3.在实际的自动控制中,控制系统的稳定性要求较高的是()
A.可靠控制
B.快速响应
C.精确控制
D.可调稳定性
答案:D.可调稳定性
4.采用PI调节器对一定迟滞的系统进行控制,以获得最佳控制效果,请问此时需要设置的迟滞时间参数Td为()
A.0
B.∞
C.大于0
D.小于0
答案:C.大于0
5.将两个控制系统级联,使控制系统在相位和频率上同步,称为()
A.交叉联结
B.电路联结
C.谐振联结
D.并联联结
答案:C.谐振联结
6.在正弦调制时,当调制信号的频率比被调制信号的频率高一些倍数时,此时调制效果最佳的调制方式是()
A.直接调制
B.振荡调制
C.错频调制
D.叠加调制
答案:C.错频调制
7.对于一个正弦驱动的线性系统。
东南大学自控原理试卷(11-12)答案

自控原理试卷(11-12)标准答案一、简答题1、开环控制系统无反馈回路,结构简单,成本较低,但是控制精度低,容易受到外界干扰,输出出现误差无法进行补偿;闭环控制结构相对复杂,但能在有不可预知的干扰的情况下,使得输出量和参考输入量之间的偏差尽可能小。
2、如果系统开环传递函数在右半平面没有零、极点,那么该系统为最小相位系统; 有延迟环节的系统不属于最小相位系统。
3、一个连续时间线性定常系统输入-输出稳定的充分必要条件是其微分方程的特征方程的根(即传递函数的极点)全部具有负的实部。
4、存在矛盾之处,三阶系统例子。
5、状态反馈不会改变系统的能控性,输出反馈也不会改变系统的能控性; 输出反馈不会改变系统的能观性,状态反馈有可能改变系统的能观性。
二、综合题1、 13223232143211s (H G G H G G G G G G G G G G -++=)2、 解: ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=11126621641k Q 验证:0=k Q ,可以知道n rankQ k <,所以系统不完全可控。
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=1016104101g Qn rankQ k <=2 系统不完全可观3、 解:由已知条件可知91=a ,52=a ,33=a ,00=b ,11=b ,42=b ,13=b 选取状态变量 y x =1,y x =2,yx =3, 则 00=β,11=β,52-=β,413=β于是得到系统状态空间表达式为u X X ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4151953100010 []X y 001= 4、26313,2js ±=,12=K5、⎥⎦⎤⎢⎣⎡+-+---=-=-t t tt t t tt e e e e e e e e t t 222212222)()(ΦΦ6、系统的闭环传递函数为Ks s s s Ks R s C ++++=)2)(1()()(2所以系统的特征方程为D (s )=0233234=++++K s s s s 劳斯表如下:Ks K s Ks s Ks 01234792372331-需满足:0792,0>->kK解得系统闭环稳定的K 的取值范围为:0<K<14/97、①6,5,3321-=-=-=λλλ;②-A⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=6-5-3-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-3/12/16/1B。