ADAMS仿真实例
adams_view使用实例
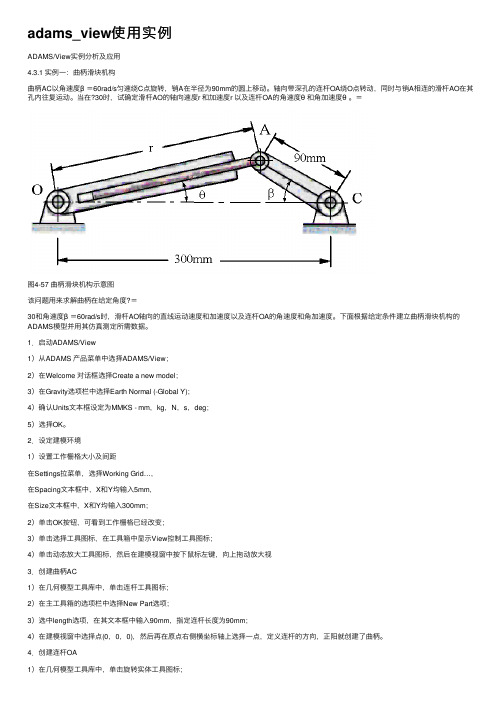
adams_view使⽤实例ADAMS/View实例分析及应⽤4.3.1 实例⼀:曲柄滑块机构曲柄AC以⾓速度β=60rad/s匀速绕C点旋转,销A在半径为90mm的圆上移动。
轴向带深孔的连杆OA绕O点转动,同时与销A相连的滑杆AO在其孔内往复运动。
当在?30时,试确定滑杆AO的轴向速度r 和加速度r 以及连杆OA的⾓速度θ和⾓加速度θ。
=图4-57 曲柄滑块机构⽰意图该问题⽤来求解曲柄在给定⾓度?=30和⾓速度β=60rad/s时,滑杆AO轴向的直线运动速度和加速度以及连杆OA的⾓速度和⾓加速度。
下⾯根据给定条件建⽴曲柄滑块机构的ADAMS模型并⽤其仿真测定所需数据。
1.启动ADAMS/View1)从ADAMS 产品菜单中选择ADAMS/View;2)在Welcome 对话框选择Create a new model;3)在Gravity选项栏中选择Earth Normal (-Global Y);4)确认Units⽂本框设定为MMKS - mm,kg,N,s,deg;5)选择OK。
2.设定建模环境1)设置⼯作栅格⼤⼩及间距在Settings拉菜单,选择Working Grid…,在Spacing⽂本框中,X和Y均输⼊5mm,在Size⽂本框中,X和Y均输⼊300mm;2)单击OK按钮,可看到⼯作栅格已经改变;3)单击选择⼯具图标,在⼯具箱中显⽰View控制⼯具图标;4)单击动态放⼤⼯具图标,然后在建模视窗中按下⿏标左键,向上拖动放⼤视3.创建曲柄AC1)在⼏何模型⼯具库中,单击连杆⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)选中length选项,在其⽂本框中输⼊90mm,指定连杆长度为90mm;4)在建模视窗中选择点(0,0,0),然后再在原点右侧横坐标轴上选择⼀点,定义连杆的⽅向,正阳就创建了曲柄。
4.创建连杆OA1)在⼏何模型⼯具库中,单击旋转实体⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)在建模视窗中选择点(0,0,0)和(-210mm,0,0)定义创建柱体的轴线;4)在建模视窗中选择下列点(0,5,0),(0,10,0),(-210,10,0),(-210,5,0),(0,5,0)创建连杆OA截⾯轮廓;注意:如果ADAMS/View⾃动捕捉特殊点,按Ctrl键可以选择任意位置。
Adams和AMESim联合仿真的设置和简单例子(都是13版本)
Adams和AMESim的联合仿真前言:本人并不是Adams和AMESim的高手,接触AMESim的时间很短,但是需要做Adams和AMEsim的联合仿真,这里分享一下我探索联合仿真的经验。
目录如下:一、仿真前需要做的准备。
1、软件的安装2、环境变量的设置二、一个具体的联合仿真例子。
(这里只介绍Adams主控的仿真)***********************************************************一、仿真前的准备1、软件的安装软件的版本对联合仿真有重要影响,这里只介绍我自己安装软件的情况。
我的系统是win7 32位,安装的软件是Adams2013、LMS b AMESim Rev 13、Visual Studio 2010。
Adams2013和AMESim Rev 13网上有很多下载资源和安装教程。
这里我只强调一下Visual Studio 2010。
也就是可以建立两个仿真软件联系的Visual C++程序。
Visual C++和VisualStudio等之间的关系大家可以自己在网上查,其实都包含有C++语言。
网上有些教程是用VC++6.0来建立两者之间的关系,但是我安装了VC++6.0的各种版本(企业版,中文版,英文版)都没有成功建立仿真,后来安装了完整的Visual Studio 2010就可以了,但是Visual Studio 2010有些大,我下载的是1.75G。
另外就是安装顺序,最好先安装VC++或者VS(我是最后安装的Visual Studio 2010,先安装的说法我这里并没有证实)。
下面是我的软件的安装位置,安装目录没有中文D:\zy\ADAMSD:\AMESimD:\Program Files\Microsoft Visual Studio 10.0在最后安装好Visual Studio 10后把D:\ProgramFiles\Microsoft Visual Studio 10.0\VC\bin下的nmake和vcvars32文件拷贝到AMESim的安装目录下D:\AMESim\v1300。
基于ADAMS的汽车多种工况的仿真

右后轮: Step ( tmi e, 0, 0, 5, 60) + Step ( tmi e,
15, 0, 20, 30); 左右后轮的制动力表达式: Step ( t im e, 50, 0,
3结 语
建立了某轿车的整车动力学仿真模型, 包括前悬
68
华北水利水电学院学 报
2009年 8月
产品设计开发周期、降低设计成本、提高设计质量的 目的.
1) 轻载爬坡速度; 2) 满载爬坡速度 3) 轻载爬坡加速度; 4) 满载爬坡加速度
图 3 轻、满 载爬坡速度和加速度
架、转向机构、后悬架以及底盘车身等. 完成了车辆 直行工况和爬坡工况在轻载、满载的情形下仿真和 分析, 并对各自的特点作出对比. 该方案为车辆在虚 拟环境下进行多工况的仿真分析提 供了一个新平 台, 为车辆深层次的设计和优化提供了一种新手段. 可以帮助相关企业摆脱对物理样机的依赖, 达到缩短
1 汽车模型的创建
1. 1 建 模 汽车包括车身、发动机、行走系、转向系、制动
系、传动系 和辅助设 备 [ 2- 3] , 是 一个复杂 的机械系 统, 如果按照车辆的真实构造进行建模, 工作量非常 大. 因此根据研究的目的, 在建模时对车辆的结构进 行了适当的抽象、简化, 对建立的整车动力学模型作
参考文献
[ 1] 唐应时, 廖丹, 李克安, 等. 汽车 双前桥转 向系统 的运动 学和动力学的 建模与 仿 真分 析 [ J]. 湘 潭大 学学 报: 自 然科学版, 2003, 28( 3): 98- 101.
[ 2] 王望予. 汽车设计 [M ]. 北京: 清华大学出版杜, 2002. [ 3] 陈家瑞. 汽车构造 [M ]. 北京: 人民交通出版社, 2000. [ 4] 李军, 邢俊文, 覃文洁, 等. ADAM S 实例教程 [M ]. 北京:
弹簧阻尼系统动力学模型adams仿真

弹簧阻尼系统动力学模型adams仿真震源车系统动力学模型分析报告一、项目要求1)独立完成1个应用Adams软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。
分析报告中要对所计算的问题与建模过程做简要分析,以图表形式分析计算结果。
2)上交分析报告与Adams的命令文件,命令文件要求清楚、简洁。
二、建立模型1)启动admas,新建模型,设置工作环境。
对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View菜单栏中,选择设置(Setting)下拉菜单中的工作网格(Working Grid)命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X与Y分别设置成750mm与500mm,间距(Spacing)中的X与Y都设置成50mm。
然后点击“OK”确定。
如图2-1所表示。
图2-1 设置工作网格对话框2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1、0cm,宽度Depth为30、0cm,建立系统的平台,如图2-2所示。
以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示,图2-2 图2-3创建模型平台3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K 与粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4图2-4 创建弹簧阻尼器4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
图2-5 添加约束至此模型创建完成三、模型仿真1)、在无阻尼状态下,系统仅受重力作用自由振动,将最下层弹簧的刚度系数K设置为10,上层两个弹簧刚度系数均设置为3,小物块的支撑弹簧的刚度系数为4,阻尼均为0,进行仿真,点击图标,设置End Time为5、0,Step Size为0、01,Steps为50,点击图标,开始仿真对所得数据进行分析。
ADAMS小球与瓶子碰撞实例

爱国 敬业 求实 创新ADAMS 小球与瓶子碰撞实例长春工业大学张习烨下面介绍一个应用 ADAMS/View 对小球与瓶子碰撞进行动力学建摸和仿真的实例。
在本实例中,将采 用 ADAMS/View 的交互式建摸方式,依次进行几何建摸、添加运动副和施加受力,最后对建立好的模型进 行动力学仿真,同时输出仿真动画。
1. 几何建模 在使用某种软件,对任何一个工程问题进行分析时,首先要进行的就是建模。
如下图 1 所示为本实例 中所需要的全部模型:瓶子、小球、滑块、连杆、曲柄和平台。
图1 1.1 平台的建模 在本例中,用以作为机架的平台是一个立方体,其建模过程如下。
(1)工作栅格间距。
将 ADAMS 工作栅格的 x 和 y 方向间距如下图所示的大小。
(2)点击立方体(Box)建摸工具按钮,选中宽度(Depth)选项,输入如图所示参数。
1爱国 敬业 求实 创新(3)通过选择点(-650.0, 0.0, -200.0)与(300.0, 0.0, -200.0)来确定立方体。
具体方法: 首先在菜单栏 view 中,打开坐标窗口 coordinate window;也可按 F4 打开。
当鼠标分别移动到(-650.0, 0.0, 0.0)与(300.0, 0.0, 0.0)时,点击右键,出现坐标输入窗口, 并输入如下图所示的数据;之后点击 apply。
即可建立如下所示的模型:1.2小球的建模 (1)点击球体(Sphere)建摸工具按钮 ;在主窗口栅格上的坐标(-70,30,0(mm) )处单击鼠标左键;2爱国 敬业 求实 创新拖动鼠标至坐标(-70,0,0(mm) )处再次单击鼠标左键;完成建立小球模型。
(2)调整小球的质量。
在 ADAMS/View 中,默认情况下物体的质量是根据物体几何实体的体积计算出来的,物质密度在默 认情况下采用的是钢材的密度,但有时为了仿真计算的需要,也可以人为指定物体的质量。
在本例中,调整小球质量到 5.0Kg:首先,将鼠标移至小球位置,点击鼠标右键,在弹出的对话框中 依次选择下图中被标示的选项:于是弹出修改物体参数 Modify Body 对话框,在 Define Mass By 栏中选择“User Input”选项,然后 将 Mass 栏中的数字改为 5.0,点击对话框的 OK 按钮,完成对小球的质量修改。
adams2020教程与实例

adams2020教程与实例adams2020是一种多体动力学仿真软件,它广泛应用于机械、航空航天、汽车工程、电子设备等领域的设计和分析过程中。
它能够帮助工程师们通过多体动力学仿真来模拟和分析复杂的物理系统,从而更好地理解系统的行为和性能,并提供改进和优化系统设计的方法。
首先,我们来介绍一下adams2020的基本概念和工作原理。
adams2020是基于多体动力学理论的软件,它将物体抽象为刚体或弹性体,通过应力、力、速度和加速度等物理量来描述物体的运动行为。
在adams2020中,用户可以建立物体的几何模型,并设置物体的质量、惯性矩阵、初速度和初位置等参数。
然后,用户可以在模型中添加各种约束和力的作用,如关节、支撑点和弹簧等,从而模拟出复杂物体之间的相互作用和运动。
adams2020提供了丰富的建模工具和功能模块,使得用户能够方便地构建复杂的物理系统模型。
在adams2020中,用户可以选择不同类型的刚体和连接器来建立模型,也可以添加各种传感器和控制器来监测和控制系统的运动。
此外,adams2020还提供了强大的分析和可视化功能,用户可以通过动画和图表等方式来观察和分析系统的运动行为。
为了更好地使用adams2020进行仿真,我们可以通过一个简单的例子来介绍其基本操作步骤。
假设我们需要模拟一个简单的摆锤系统,其中包含一个固定支撑点和一个可自由运动的摆锤。
首先,我们需要在adams2020中创建一个新的模型,并选择适当的刚体和连接器类型来建立模型。
然后,我们可以设置摆锤的质量、长度和初始位置等参数,并添加适当的约束和力的作用来模拟摆锤的运动。
最后,我们可以通过模拟和分析功能来观察和分析摆锤的运动行为,如角度、速度和加速度等。
除了基本的建模和仿真功能外,adams2020还提供了一些高级功能,如优化和灵敏度分析等。
通过这些功能,用户可以进行系统设计的优化和改进,找到系统的最佳参数和结构,以进一步提高系统的性能。
ADAMS中的动平衡仿真分析
40.88 454.22 2835.5 57.82 640.42 4085.9 18.24 202.66 1266.6
41.12 456.84 2855.2 58.45 648.24 4212.4 26.98 299.26 1870.4
41.12 456.84 2853.7 58.45 645.19 4080.3 15.64 173.25 1082.9
α :斜盘的倾角
N :活塞的列数
θ :主轴的转角
对于 6sxx 变排量压缩机,往复惯性力不仅随主轴的转速而变且随斜盘倾角不同而变化。
通过对 2-1 式的分析可以发现:除了仅有一列活塞时往复惯性力不为零外,当活塞列数为
两列和两列以上时,只要活塞是均布的,则活塞的总往复惯性力等于零。
任意 N 列活塞的总往复惯性力矩:
尺寸已经相当大,由此产生的回转离心惯性力矩也很大。在该变排量压缩机的结构设计中,为
了减小大倾角和高转速时活塞往复运动产生的较大有害惯性力矩,特使斜盘及与斜盘装配在一
InertiaTorque_x_5_12
InertiaTorque_y_5_12
Torque(N.mm)
Torque(N.mm)
Time(s)
2 5 和 12 度时 X 向(径向)三种转速 动不平衡力矩变化趋势曲线
InertiaTorque_x_20
Time(s)
图 图 3 5 和 12 度时 Y 向(径向)三种转速
;OY 轴垂直于主轴中心线,正向向上;OX 轴水平向,整个坐标系符合右手螺旋定则。 任意 N 列活塞的总往复惯性力:
∑ ∑ Fg
=
N
Fgi
i =1
N
=m ⋅ R ⋅ω 2 ⋅ tgα ⋅ cos[θ
用adams进行仿真第六讲
增加发动机、车身后 整车多体动力学模型
用adams进行仿真第六讲
铁路车辆及装备
悬挂系统设计 磨耗预测 轨道载荷预测 货物加固效果仿真 物料运输设备设计 事故再现 车辆稳定性分析 临界车速预测 乘员舒适性研究
用adams进行仿真第六讲
结构噪声 仿真
双层车 模态仿真
温度场 仿真
D38轻量 化设计
强度 分析
ADAMS软件包括3个最基本的解题程序模块:A/View(基本环 境)、A/Solver(求解器)和A/PostProcessor(后处理)。 另外还有一些特殊场合应用的附加程序模块,A/Rail(机车模 块 ) 、 A/Driver( 驾 驶 员 模 块 ) 、 A/Tire( 轮 胎 模 块 ) 、 A/Linear(线性模块)、A/Flex(柔性模块)、A/Controls(控制模 块 ) 、 A/Car( 轿 车 模 块 ) 、 A/FEA ( 有 限 元 模 块 ) 、 A/Hydraulics ( 液 压 模 块 ) 、 A/Vibrations( 振 动 模 块 ) A/Exchange(接口模块)、A/Animation(高速动画模块)等。
产品概念设计
产品详细设计
用adams进行仿真第六讲
美国GM公司虚拟样机技术 戴维·陈是GM R&D虚拟样机(VP)的首席科学家,他的观点
值得考虑: ➢虚拟样机是一个方向,同时也是一个渐进过程; ➢产品设计的所有要求,用数学模型创建后,一定要验证,
用试验验证; ➢关键是建模(Creating Model),且应在专家指导下进行;
用adams进行仿真第六讲
m=5,k=2,c=1
用adams进行仿真第六讲
已知条件:假设系统处于零平衡位置,外力函数为幅 值为1 的阶跃函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A Report Submitted in Partial Fulfillment of theRequirements for SYDE 461ContentsContents ii Table of Figures iv 1Project Summary 11.1 Problem statement (1)1.2 Phase 1 goals (2)2Design Process 4 3Results Achieved 83.1 PCB modifications (8)3.2 Mechanical issues resolved (9)Limit switches (10)Hip motor encoders (11)3.3 Gait research (12)3.4 ADAMS simulation (13)3.5 Communication testing (15)4Future Plans 175Tentative Schedule 19 Appendix A C3 Meeting Minutes 22 C3 meeting #1 (22)C3 meeting #2 (25)C3 meeting #3 (29)Table of FiguresFigure 1: Black-Box System (4)Figure 2: Detailed System Diagram (5)Figure 3: Limit Switch Placement (10)Figure 4: Hip motor encoder (11)Figure 5: ADAMS model of Hexplorer (14)1Project SummaryHexplorer is an evolutionary project intended to research and develop a small, six-legged, autonomous walking robot. The project encompasses all design areas required to make a robot move, including Printed Circuit Board (PCB) design, mechanical design and walking algorithms. Since its initial conception in 1996, the Hexplorer project has seen much change and several improvements.The present Hexplorer configuration is composed of a circular body with six legs mounted equidistant from each other around the circumference of the body. Each leg has three degrees of freedom and therefore requires three separate DC motors to articulate i ts motion. Each leg has its own “leg” PCB with an integrated DSP that controls the leg‟s three motors. The overall motion of the robot is achieved using a single “brain” board, also with an integrated DSP, responsible for sending commands to each of the individual leg boards.1.1Problem statementAs of September 2002, Hexplorer was incapable of autonomous motion. Only two of the six legs were functional, and furthermore, the legs movements were completely controlled by the leg boards rather than beingdirected by the brain board and actuated by the leg boards. Since improvements had recently been made to many of Hexplorer‟s subsystems including a complete re-design of the legs and the integration of new DSPs on all the circuit boards, it was decided that only minor changes would be needed to be made to get the robot to walk. Thus, the problem facing this year‟s design group was to fix any and all mechanical and software problems with Hexplorer, which would allow the robot to walk.The problem statement for this project is as follows:To better understand the intricacies involved in a locomotion machine, and to experiment with sophisticated GAIT algorithms, the Hexplorer 2002 team will remedy any problems with the existing robot, to allow it to autonomously navigate an even surface.1.2Phase 1 goalsIt was decided to have all mechanical and circuit board issues with the robot resolved by December 2002. This would leave the team to implement and design advanced walking algorithms for the robot during the following term.After careful investigation it was shown that to advance Hexplorer to a level where it could be used as a gait-testing platform would require three major tasks.1.Understand and correct the problems with the PCBs responsible forcontrolling Hexplorer‟s movement.2.Repair any mechanical issues preventing the legs of Hexplorer frommoving – including limit switches and motor encoders.3.Research gait algorithms and create a simulation of Hexplorer toallow for designing and testing of these algorithms without damage to the actual robot.With these detailed goals in mind, the team set out to create a sound research platform that could later be used to develop and test complex and autonomous walking gait algorithms.2Design ProcessSince the principal problem f acing this year‟s Hexplorer team was that the robot would not move; a thorough systems approach was required. The team, having no previous experience with this robot, thought of this problem as a …black box‟. Inputs were fed into the system, but nothing was being returned. With detailed research and analysis, this …black-box‟ was subsequently broken down into smaller, recognizable components. Figure 1 shows the original problem facing the Hexplorer 2002 design team.‘BLACK-BOX’Figure 1: Black-box systemThe first step to recognizing the underlying problems was to separate the problem into smaller, more manageable components. The team worked together with the supervisor to identify the major components limiting the motion of Hexplorer. From information passed on by previous Hexplorer teams, and rigorous testing, the team was able to isolate the system components shown in Figure 2.‘BLACK-BOX’Figure 2: Detailed system diagramUsing Figure 2 as a guide, the main areas for malfunction were identified. The possible problematic areas are circled on the diagram. The team was next able to focus its efforts on investigating the following situations.The first problem with the robot was that seven circuit boards were not all in perfect working order. From the strictly hardware perspective, a board was considered functional if the board was able to 1) download code and 2) run the code. Unfortunately, none of the boards were able to download code. The previous Hexplorer team had labeled some of the circuit boards as either “Working” or “Not Working”, but they did not indicate why the “Not Working” boards were not working. The problem with to downloading code could have been localized in either the circuit board DSPs, the other components on the board, of the method used to download the code. Thesolution strategy for this problem involved isolating the problem area and resolving the issue.The second problem with the robot was that hip encoders were apparently not working. This problem could be attributed to either the shaft not being connected to the encoder, the encoder was not providing a signal to the PCB, or the PCB was not properly interpreting the signal. As with the first problem, the solution strategy involved isolation the problem area and resolving the issue.The third problem involved the four limit switches on each of the legs. Some of the limit switches were missing, and furthermore, not all the limit switches were guaranteed to be operational. Therefore, each limit switch would have to be tested and the missing and faulty limit switches would have to be replaced.The fourth and final identified problem involved the communication between the brain board and the leg boards. Although the foundations for this communication have been implemented in both the leg and brain DSP code, the test programs provided by the previous group did not involve the brain specifying foot locations to each of the legs. The most that the previous group was able to accomplish in terms of this communication was a simple pinging program between the brain and the leg. Therefore, thecommunication code in both the leg and the brain would have to be studied, tested, and modified if necessary, and then a communication scheme would have to be designed and implemented into both the leg and brain test programs.3Results AchievedThrough valuable research and hard work, the team was successfully able to address the predefined term goals. Cooperation of team members throughout the design process was the key to success for this phase of Hexplorer‟s development.3.1PCB modificationsAt present, all seven circuit boards are now downloading code and running code successfully. The first problem with the boards was that the method to download the code was incorrect. As the program code is to be downloaded to the Flash, the Flash Programmer tool should be used to download code. Furthermore, the reset button on the boards had to be depressed while the Flash Programmer tool was downloading code. This information was obtained by contacting the previous group.However, even in using the correct method, the seven boards were still not downloading code correctly. After much testing and research, it was determined that the problem involved the Flash p rogrammer‟s clock frequency. The clock that is used to program the DSP is provided by a small circuit external to the DSP. The Flash programming utility is set to expect a certain frequency. For the downloading of code to work correctly, these twofrequencies should be identical. However, it was found that the two frequencies were quite far apart: the clock frequency on the DSP was 80MHz while the Flash Programmer was expecting 30MHz. To resolve this issue, software parameters in the Flash Programmer were modified so that both the clock frequency on the DSP and the frequency expected by software were both 20MHz.After resolving this issue, six of the seven boards were now functional, but there was still one leg board that did not download code. Considering that the malfunctioning board was identical to the other leg boards in design, it was determined that the problem with the board was component related. Some resistors and capacitors that were known to be problematic were first replaced, but the board still was not functional. Finally, it was decided that the DSP had to be replaced. Once the new DSP was soldered onto the board, the board functioned correctly.3.2Mechanical issues resolvedFixing the minor mechanical problems of Hexplorer involved primarily the selection and purchasing of additional limit switches. However, it was also necessary to check that the encoders for the hip motors were workingproperly. Initially there was some skepticism on the reliability of these devices, but they were proven to be working normally.Limit switchesEach leg of the robot requires four limit switches. Figure 3 shows there is one limit switch for the hip, and one for each leg motor. Although not yet attached, eventually one limit switch must be placed near the robot foot.Figure 3: Limit switch placement When the team began working with Hexplorer in September, numerous limit switches were either broken or missing. Some additional hardware was also required to attach the limit switches to the legs. Using the existing limit switches as a guide, more switches were ordered online from an electronics supplier called DigiKey. Some price comparisons were performed topurchase the required switches at the lowest price.Leg LimitSwitchesHipAlthough a seemingly trivial problem of purchasing components, the team found it a valuable learning experience to purchase these limit switches from a recognized supplier. The team conversed with technical representatives at DigiKey to ensure the proper parts were ordered, and in doing so learned important information about electronic components.Hip motor encodersTo ensure that the hip motors were rotating the appropriate amount, it was decided to check the effectiveness of the hip encoders. Figure 4 shows the placement of the hip encoders, placed below the hip joint.Hip MotorEncoderFigure 4: Hip motor encoderBecause the legs of Hexplorer sporadically did not rotate the desired amount, it was suspected that the hardware responsible for counting the revolutions of the motors was faulty. The team set up a simple test to checkif in fact the encoders were malfunctioning. To do this, one of the legs was run through a typical homing sequence, and the values of the encoders were measured using an oscilloscope. After several tests achieving desired results, it was concluded that there was no problem with the hardware. Any discrepancies must be caused by the software responsible for rotating the legs.The team found this testing exercise a valuable learning experience primarily because it promoted teamwork and cooperation. Both team members were actively involved in these tests and by studying the appropriate data sheets, were able to learn more about the hardware involved in Hexplorer.3.3Gait researchFor this phase of the project, research was conducted on various naturally existing gaits. The most common types of Gaits for six-legged insects are the tri-pod gate and the ripple gate (or wave gait). Many insects in fact use a combination of the depicted gaits, depending on the situation. However, for the purposes of this phase of the project, each gait will be simulated separately, with no advanced combinations.The ripple gate keeps the maximum number of feet in contact with the ground to provide the maximum stability for the robot. In the ripple gait, the rear pair of legs is moved, then the middle pair, and then the front pair. The body is then translated forward, with all feet remaining on the ground. The sequence is then repeated. Unfortunately, because the robot only advances after all six legs have moved, the walking motion is very slow.To improve the speed of the robot, a tri-pod gate can be used. In the tri-pod gait, three legs move at a time: the middle leg on one side and the front and rear legs on the other side. Provided the three legs form a …tri-pod‟ around the centre of mass of the robot, this gait will maintain stability. The tri-pod is much faster than the ripple gait because the body is translated forward each cycle by three legs, while the other three legs get into position.Because of the superior speed and reasonable stability, the team has decided to implement the tri-pod gait as the primary walking algorithm of Hexplorer. To be created next term, this design process will be discussed further in the Future Plans section.3.4ADAMS simulationTo test multiple gait algorithms and to study the torque requirements on each of the motors of Hexplorer, a simulation was created in a software programcalled ADAMS. This tool allows the user to run a simulation of a mechanical system, and subsequently plot reaction forces and torques. ADAMS also allows the user to perform inverse kinematics and dynamics analysis on a particular mechanism.From previous Hexplorer teams, an ADAMS model of one of the legs of Hexplorer was obtained. This model was slightly modified to account for recent changes and then combined to form a complete model of Hexplorer. The resulting model is shown in Figure 5.Figure 5: ADAMS model of HexplorerWith the model created, a few simple movements were tested to examine the behaviour of the robot. The first simulation tested the responsiveness of one individual leg. The model was created with a contact force to groundthat allowed for realistic slipping of the feet. However, this individual leg was capable of translation in one direction only. When all six legs were connected to the base, and subsequently simulated, the robot moved in a realistic manner over the surface of the model.This recreation has given the team a valuable tool for testing and analyzing the gaits that are to be implemented in the second phase of the project. During the construction this model, much was learned about the ADAMS software and its vast capabilities.3.5Communication testingOne of the present components that the Hexplorer group is working on is attempting to exercise the Brain-Leg communication channels. To properly control the walking gait of the robot, the brain must deliver desired foot positions to the legs and the legs must reply when the leg reaches the desired position or if the desired position is unreachable. The current line of testing is trying to test these two communication messages.Once the communications testing is completed, the brain should be able to coordinate some walking gait algorithm. The Hexplorer group should be able to get the robot walking in a simple tri-pod gait by the end of December.This first gait algorithm will not include the control structure or inverse kinematics.4Future PlansOver the next term, the Hexplorer group plans on implementing a simple gait algorithm using a more sophisticated control structure that coordinate the legs to ensure that they are working most efficiently together. This algorithm will be able to monitor and control the speed of up to nine motors using four DSPs (three leg DSPs and the brain DSP) to translate the body with three feet on the ground. Furthermore, in this algorithm, the brain will demand foot position as a coordinate in space instead of using encoder counts. This will involve implementing inverse kinematics equations, which relate position to encoder counts and vice versa, on the leg DSP boards. The implementation of this algorithm is planned to be completed by the end of January 2003.The Hexplorer team then plans on entering the Ontario Engineering Competition in February 2003 with the walking robot in the Corporate Design category. The team has already approached the Canadian Space Agency and MD Robotics to “sponsor” the project. The team is also planning on entering the Texas Instruments DSP competition in the summer.Between these two competitions, the team will attempt to implement more sophisticated gait algorithms than the simple tri-pod gait. In is theteam‟s hope that these advanced walking algorithms will be able to be displayed at the TI DSP competition.5Tentative ScheduleThe following table outlines preliminary goals and deadlines based on rough calculations. Due-dates may be shifted slightly as more information is learned.Appendix AC3 Meeting MinutesC3 meeting #1Location: E2-1303ETime: 10:00 PMNo Regrets!Intelligent Vacuum cleaner group (Jimmy, Keith, Sam) -two approaches-GPS, location of the vacuum-Try to cover the specific area-Activate it and make sure that it covers all areas-Random algorithm or pattern algorithm-Internal sensing system (no external system required) -Battery life is an issue-No pre-programming-Figures the boundary on it‟s own-power assumption-vacuums use lots of power-need own power systemQ/A- How big is it and what is the shape? (0.5 meter by 0.5 meter, square or a car shaped)- What is your power source? (Not sure at this moment)- What is your goal for this term? (Algorithm done)Hexplorer group (Damien and Nick)-six-legged walking robot-since 1996-in 1998, it changed from rectangular to circular-previous term, upgraded software and leg movement-last year, just make the leg move (one leg)-fixed circuit boards (central brain)-want to have all six legs moving and walk across something-need to debug the board-need to fix the structure of the controllerQ/AFirefighter robot (Ivy, Jane, James, Lyon, Patrick)-robot to put off a fire-open area with no obstacles- 3 different fires to extinguish-room temp of 50C for heat analysis-challenges include cooling system, extinguishing unit-difficulty is to maintain the internal circuit system‟s temperature within it‟s operating range-use water for cooling system and the extinguishing unitIssues-problem with the sensor-problem with calculating the distance between the robot and the fire -Install funnel at the top of the robot and collect water from the sprinkler systemQ/A- What will you accomplish this term? (Extinguishing unit and pumps)- Will the sunlight interfere with the sensing of the fire? (Will have to filter out the ambient light)-C3 meeting #2Location: E2-1303ETime: 10:00 PMDate: Tuesday, November 19, 2002Regret: Keith HumIntelligent Vacuum cleaner group (Jimmy, Keith, Sam)-Ordered a compass (internal) with serial interface-Received IR sensors-Comparing components-Preparing a funding proposal-Started writing report (e.g., concept generation)-Foresee starting path algorithm – can use code simulator-Rough chassis designIssues-Difficult to find robotics parts in Canada-Problems with microcontrollers (don‟t know where they put development kit)-Still waiting to receive more components for testingTimeline- about 20% of project completed: may have to redefine scope but Karray is ok with this- end of this week: complete path finding pseudocode/algorithm- middle of next week: complete testing of sensors- Dec 2: final report and complete testing microcontrollerQ/A-Hexplorer group (Damien and Nick)-began testing: testing legs-can tell robot where to goIssues-no problems: on schedule- 6 degrees of freedom and 9 motors to control: motors may counteract one another-must find a way to coordinate motor movementTimeline- about 70% of projected work completed- get brain to communicate w/ legs- try to get all 5-6 legs working- examine different walking algorithmsQ/ADoes the Hexplorer model any creature in nature? No –since it‟s a hexagon with equally spaced legs.Firefighter robot (Ivy, Jane, James, Lyon, Patrick)- started writing final report- want to start building prototype in 4A term since 4B term is short- already performed fire testsIssues-still have not received robot base: held at border/customs-cannot start preliminary prototyping as no actual dimensions available -still no news about thermodynamics lab for experiments and testing -Timeline- 40% of project completed- complete all preliminary testing by end of this week- continue writing report and have a first draft ready by end of next weekQ/A-Opinions on C3 meetings-C3 meetings started too late in the term. May have been more helpful at the beginning of the project especially for topic selection-Perhaps organize next C3 meeting in lab so can demonstrateprototypes/testing-May be more beneficial if C3 meetings were done at the end of the project so we can discuss problems with other groups-It‟s good because we can hear about others‟ groups projects – for personal interest-But it‟s not really helpful as our projects are very di fferent, different group sizes, etc.C3 meeting #3Location: Systems WorkshopTime: 2:00 PMDate: Tuesday, November 26, 2002Regret: Lyon WongHexplorer Group-Show and Tell-Has 6 different boards to control each of the legs- 1 brain board to control all 6 legsFirefighter Group-Photo sensors-Extinguishing unit-PumpVacuum Group-Received some parts-Waiting for some more part-Will design control algorithm by end of this term-Two batteries: one for the electrics and other for the motors。