基本逻辑指令及应用
第3章PLC的基本指令及程序设计
✓ 计数器当前值:其值是一个存储单元,它用来存储计数器当前所累 计的脉冲个数,用16位符号整数来表示,最大数值为32 767。
计数器输入端和操作数 ✓ 设定值输入:数据类型为INT型。 ✓ 寻址范围:VW、IW、QW、MW、SW、SMW、LW、AIW、T、C、 AC、*VD、*AC、*LD和常数。 ✓ 一般情况下使用常数作为计数器的设定值。
LPS(Logic Push) 逻辑入栈指令(分支电路开始指令)
LRD(Logic Read) 逻辑读栈指令
LPP(Logic Pop) 逻辑出栈指令(分支电路结束指令)
LPS/LRD/LPP
LPS/LRD/LPP举例 例3
指令3 与ENO指令AENO ENO是LAD中指令盒的布尔能量流出端。该指令使用较少。
举例
1. 逻辑堆栈操作指令
堆栈 堆栈是一组能够存储和取出数据的暂存单元。 遵循“先进后出”的原则。 堆栈深度为“9层”。 可以存储最新的逻辑运算(中间)结果,以便后续逻辑环节使用该结果。 逻辑堆栈操作主要来完成触电复杂逻辑连接的编程。
指令1 OLD(或块指令) ALD (与块指令)
OLD(Or Load)
定时器的指令及使用 指令
定时器的指令及使用
接通延时定时器TON(On-Delay Timer) ✓ 接通延时定时器用于单一时间间隔的定时。 ✓ 上电周期或首次扫描时,定时器位为OFF,当前值为0。 ✓ 输入端接通时,定时器位为OFF,当前值从0开始计时,当前值达 到设定值时,定时器位为ON,当前值仍连续计数到32 767。 ✓ 输入端断开,定时器自动复位,即定时器位为OFF,当前值为0。
电气控制与PLC应用 第六章 基本指令

(a)梯形图 图6-13
(b)指令表程序图
LDP、ANDP、ORP指令的用法
一、FX3U/FX3UC系列PLC的基本逻辑指令 6、边沿检测指令(LDP/LDF、ANDP/ANDF、 ORP/ORF)
(a)梯形图 图6-14
(b)指令表程序图
LDF、ANDF、ORF指令的用法
一、FX3U/FX3UC系列PLC的基本逻辑指令 7、置位与复位指令(SET/RST)
Y21
MCR MC N0 X11 X12
N0
N0 M30 Y30
Y31
MCR
N0
图6-28
MC/MCR指令的用法
一、FX3U/FX3UC系列PLC的基本逻辑指令
10、主控指令(MC/MCR)
X40 MC N0 M40 [A] N0 M40 N0级 当X40为ON时, 母线[B]为带电状态 指定最低的嵌套级为主控置位起点
(a)梯形图
(b)指令表程序图
图6-19 PLS/PLF指令的用法
X5 M5 X5 PLS M5 M5 (a)LDP指令 (b)PLS指令 (c)时序图 X5 一个扫描周期
图6-20 PLS与LDP指令比较
一、FX3U/FX3UC系列PLC的基本逻辑指令 8、 脉冲微分输出指令(PLS/PLF)
X0 M11 M10 X0 一个扫描周期 X0 M11 M10 M11 (a)用OUT指令 (b)与图(a)对应的时序 (c)用PLS指令 X0 PLS M10
一、FX3U/FX3UC系列PLC的基本逻辑指令 4、触点并联连接指令(OR/ORI)
(a)梯形图
(b)指令表程序图
图6-9 OR指令的用法
(a)梯形图
(b)指令表程序图
PLC基本逻辑指令及应用—卫生间冲水控制系统

【输入元件】
【地址】
【输出元件】
【地址】
I0.0
光电检测开关
电磁阀
Q 0.0
光电检测开关
+24V
+24V
L+ M
1M
I0.0
S7-1200 CPU121` 4C DC/DC/DC
3L+
3M
Q0.0
+24V
HL1
1、当有人使用卫生间时,5S后冲一次水,冲水时间为6S的程
序。
2、当人离开卫生间时,再冲一次水,冲水时间7S的程序。
(1)接通延时定时器TON
名 称
使用TON指令,延时PT时间后,输出Q置位
预设值
当前值
例题
012345
(2)脉冲定时器TP
名 称
使用TP指令,输出Q置位的时间为PT
预设值
当前值
PT
PT
PT
例题
012345
(3)关断延时定时器TOF
名 称
使用TOF指令,使能IN断开PT时间后,输出端Q复位
预设值
当前值
例题
012345
(4)时间累加器TONR
名 称
使用TONR指令,延时PT时间后,输出端Q复位
复位端 预设值
当前值
卫生间冲水系统
2.任务解析
任务要求:
用三种定时器Leabharlann 计卫生间冲水控 制系统。卫生间冲水控制系统的运行规律是:
➢ 当有人使用卫生间时,5S后冲一次 ,冲水时间为6S
➢ 当人离开卫生间时,再冲一次水, 冲水时间7S
此任务中 1、用一个光电开关来检测是否有人存在。 2、用TON定时器来完成5S的定时。 用TON 的Q作为TP定时器的IN信号。用TP定时器来 完成6S冲水。 3、7S的定时器我们用TOF来完成。
PLC基本逻辑指令及应用—三相异步电动机正反转控制

OB 组织
FB
FC
功能块 功能
DB 数据块
FB1
FC1
DB
OB1
FB2
FB1
FC21
DB
DB
FC1
DB1
变量类型
位
(1字)节 基本数据类型
字 双字 字符 有符号字节 整数 双整数 无符号字节 无符号整数 无符号双整数 浮点数(实数) 双精度浮点数
时间
符号 Bool Byte Word DWord Char Sint Int Dint USInt UInt UDInt Real LReal
I0.0 Q0.0
常闭 触点
SB2 KM2 I0.1 Q0.1
KM2
输出
Q0.1
线圈
KM1
Q0.0
KM1 Q0.2 KM2
Q0.1
“bit” 常开触点
“bit” 常闭触点
“bit” 线圈
左
母
线
右
母
线
KH SB3
I0.3
I0.2
SB1 KM1
SB2 KM2
I0.0 Q0.0 I0.1 Q0.1
KM2
➢ 用字母表示存储区标识符,M表示位存储区、I 表示输入映像区、Q表示输出映像区。
➢ 地址由字节地址和位地址组成
MSB
LSB
7 65 4 32 10
I0
1
2
3
(3)不同存储区寻址 ➢ 字节的寻址:
MSB
LSB
7 65 4 32 10
M0
1
2
3
(3)不同存储区寻址 ➢ 字的寻址:
MSB
LSB
7 65 4 32 10
基本逻辑指令说明及应用
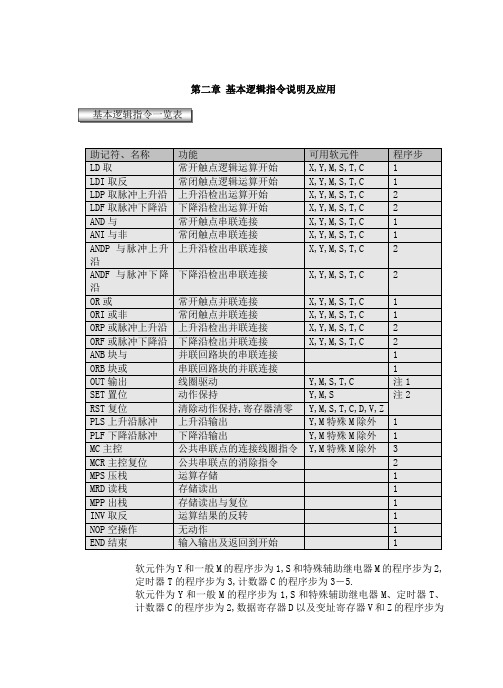
第二章基本逻辑指令说明及应用基本逻辑指令一览表助记符、名称功能可用软元件程序步LD取常开触点逻辑运算开始X,Y,M,S,T,C1LDI取反常闭触点逻辑运算开始X,Y,M,S,T,C1LDP取脉冲上升沿上升沿检出运算开始X,Y,M,S,T,C2LDF取脉冲下降沿下降沿检出运算开始X,Y,M,S,T,C2AND与常开触点串联连接X,Y,M,S,T,C1ANI与非常闭触点串联连接X,Y,M,S,T,C1ANDP与脉冲上升上升沿检出串联连接X,Y,M,S,T,C2沿ANDF与脉冲下降下降沿检出串联连接X,Y,M,S,T,C2沿OR或常开触点并联连接X,Y,M,S,T,C1ORI或非常闭触点并联连接X,Y,M,S,T,C1ORP或脉冲上升沿上升沿检出并联连接X,Y,M,S,T,C2ORF或脉冲下降沿下降沿检出并联连接X,Y,M,S,T,C2ANB块与并联回路块的串联连接1ORB块或串联回路块的并联连接1OUT输出线圈驱动Y,M,S,T,C注1SET置位动作保持Y,M,S注2RST复位清除动作保持,寄存器清零Y,M,S,T,C,D,V,ZPLS上升沿脉冲上升沿输出Y,M特殊M除外1PLF下降沿脉冲下降沿输出Y,M特殊M除外1MC主控公共串联点的连接线圈指令Y,M特殊M除外3MCR主控复位公共串联点的消除指令2MPS压栈运算存储1MRD读栈存储读出1MPP出栈存储读出与复位1INV取反运算结果的反转1NOP空操作无动作1END结束输入输出及返回到开始1软元件为Y和一般M的程序步为1,S和特殊辅助继电器M的程序步为2,定时器T的程序步为3,计数器C的程序步为3-5.软元件为Y和一般M的程序步为1,S和特殊辅助继电器M、定时器T、计数器C的程序步为2,数据寄存器D以及变址寄存器V和Z的程序步为3.LD,LDI,LDP,LDF,OUT 指令指令解说助记符、名称功能可用软元件程序步LD取常开触点逻辑运算开始X,Y,M,S,T,C1LDI取反常闭触点逻辑运算开始X,Y,M,S,T,C1LDP取脉冲上升沿上升沿检出运算开始X,Y,M,S,T,C2LDF取脉冲下降沿下降沿检出运算开始X,Y,M,S,T,C2OUT输出线圈驱动Y,M,S,T,C见说明LD,LDI,LDP,LDF指令将触点连接到母线上.多个分支用ANB,ORB时也使用.LDP指令在上升沿软元件由OFF到ON变化时接通一个周期;LDF指令在下降沿软元件由ON到OFF变化时接通一个周期.LD,LDI,LDP,LDF指令的重复使用次数在8次以下.即与后面的ANB,ORB指令使用时串并连使用的最多次数为8个.软元件为Y和一般M的程序步为1,S和特殊辅助继电器M的程序步为2,定时器T的程序步为3,计数器C的程序步为3-5.OUT指令各种软元件的线圈驱动,但对输入继电器不能使用.并列的OUT可多次连续使用.OUT指令驱动计数器时,当前面的线圈从ON变成OFF,或者是从OFF变成ON时,计数器才加一.编程示例0 LD X0001 OUT Y0002 OUT C0 K105 LDI X0016 OUT Y0017 OUT T0 K10010 LD C011 OUT Y00212 LD T013 OUT Y00314 LDP X00216 OUT M217 LDF X00319 OUT M320 END用LD,LDI,LDP,LDF指令与母线连接.输出使用OUT指令驱动线圈.使用OUT指令驱动定时器的计时线圈或者计数器的计数线圈时,必须设定定时和计数的时间和计数的值,可以是常数K,或者由数据寄存器间接指定数值.每个程序结束必须要有END指令,END指令详见后面的END指令介绍.AND,ANI,ANDP,ANDF 指令指令解说助记符、名称功能可用软元件程序步AND与常开触点串联连接X,Y,M,S,T,C1ANI与非常闭触点串联连接X,Y,M,S,T,C1上升沿检出串联连接X,Y,M,S,T,C2ANDP与脉冲上升沿下降沿检出串联连接X,Y,M,S,T,C2ANDF与脉冲下降沿AND,ANI,ANDP,ANDF指令只能串接一个触点,两个以上的并联回路串联时使用后面的ANB指令.串联次数不受限制.ANDP,ANDF指令在上升沿即软元件由ON到OFF变化时和下降沿即软元件由OFF到ON变化时接通一个周期.编程示例0 LD X0001 AND X0012 OUT Y0003 LD X0024 ANI X0035 OUT Y0016 LD Y0007 ANDP Y0019 OUT Y00210 LDI X00411 ANDF Y00113 OUT Y00314 END实例中X001,X003,Y001作为串联触点与前面的触点相连.OR,ORI,ORP,ORF 指令指令解说助记符、名称功能可用软元件程序步OR或常开触点并联连接X,Y,M,S,T,C1ORI或非常闭触点并联连接X,Y,M,S,T,C1ORP或脉冲上升沿上升沿检出并联连接X,Y,M,S,T,C2ORF或脉冲下降沿下降沿检出并联连接X,Y,M,S,T,C2OR,ORI,ORP,ORF指令只能并接一个触点,两个以上的串联回路并联时使用后面的ORB指令.ORP,ORF指令在上升沿即软元件由OFF到ON变化时和下降沿即软元件由ON到OFF变化时接通一个周期.OR,ORI,ORP,ORF指令和前面的LD,LDI,LDP,LDF指令一起使用,并联次数不受限制.编程示例0 LD X0001 ORP X0013 ORI M04 OUT Y0005 LD X0026 ORF X0108 ANI X0039 ORI X01110 AND X00411 OR X01212 LDI X00513 ORF X01315 AND X00616 ORI X01417 ANB18 OUT Y00119 END使用OR,ORI,ORP,ORF与前面的LD,LDI,LDP,LDF并联连接,在程序步12到16中,由于是两个并联回路块的串联,所以使用ANB指令,ANB指令详见后面的说明.2. 5 ANB,ORB 指令2. 指令解说助记符、名称功能可用软元件程序步ANB块与并联回路块的串联连接1ORB块或串联回路块的并联连接1当多分支回路与前面的回路串联连接时,使用ANB指令.分支以LD,LDI,LDP,LDF指令作为起点,使用ANB指令与前面以LD,LDI,LDP,LDF指令作为起点的分支串联连接.当2个以上的触点串接的串联回路块并联连接时,每个分支使用LD,LDI指令开始,ORB指令结束.ANB,ORB指令都是不带软元件的指令.ANB,ORB使用的并串联回路的个数不受限制,但是当成批使用时,必须考虑LD,LDI的使用次数在8次以下.2. 编程示例0 LD X0001 ANI X0012 LDI X0023 AND X0034 ORB5 LD X0046 AND X0057 ORB8 OUT Y0009 LD X00610 OR X00711 LD X01012 ANI X01113 LDI X01214 AND X01315 ORB16 ORI X01417 ANB18 OR X01519 OUT Y00120 END在每个分支的最后使用ORB指令,不要在所有的分支后面使用ORB指令,如程序步4和7所示.ORB和ANB指令只是对块的连接,如果不是块就不能使用,如程序步16和18不是块就不能使用.如图所示,串联回路块和并联回路块的示例.INV 指令指令解说助记符、名称功能可用软元件程序步INV取反运算结果的反转1INV指令是将INV指令之前,LD,LDI,LDP,LDF指令之后的运算结果取反的指令,没有软元件.编程示例0 LD X0001INV2 OUT Y0003 LDI X0014INV5INV6 OUT Y0017 ENDINV指令的动作范围如图:PLS,PLF 指令指令解说助记符、名称功能可用软元件程序步PLS上升沿脉冲上升沿输出Y,M特殊M除外1PLF下降沿脉冲下降沿输出Y,M特殊M除外1使用PLS指令时,只在线圈由OFF变成ON的一个扫描周期内,驱动软元件.使用PLF指令时,只在线圈由ON变成OFF的一个扫描周期内,驱动软元件.对具有停电保持功能的软元件,它只在第一次运行时产生脉冲动作.编程示例0 LD X0001 PLS M03 LD M04 SET Y0005 LD X0006 PLF M18 LD M19 RST Y00010 LDP X00112 OUT M213 LD M214 SET Y00115 LDF X00117 OUT M318 LD M319 RST Y00120 END程序段0-2和10-12的动作相同,都是在线圈闭合的上升沿,驱动一个扫描周期的输出.同样,程序段5-7和15-17的动作相同,都是在在线圈闭合的下降沿,驱动一个扫描周期的输出. SET,RST指令的作用详见后面的说明.SET,RST 指令指令解说助记符、名称功能可用软元件程序步SET置位动作保持Y,M,S见说明RST复位清除动作保持,寄存器清零Y,M,S,T,C,D,V,Z软元件为Y和一般M的程序步为1,S和特殊辅助继电器M、定时器T、计数器C的程序步为2,数据寄存器D以及变址寄存器V和Z的程序步为3.SET指令在线圈接通的时候就对软元件进行置位,只要置位了,除非用RST指令复位,否则将保持为1的状态.同样,对RST指令只要对软元件复位,将保持为0的状态,除非用SET指令置位.对同一软元件,SET,RST指令可以多次使用,顺序随意,但是程序最后的指令有效.RST指令可以对数据寄存器D,变址寄存器V,Z,定时器T和计数器C,不论是保持还是非保持的都可以复位置零.编程示例0 LD X0001 SET Y0002 LDI X0013 RST Y0004 LDP X0016 SET Y0017 LDF X0018 RST Y00110 ENDNOP,END 指令指令解说助记符、名称功能可用软元件程序步NOP空操作无动作1END结束输入输出及返回到开始1程序清除时指令变为NOP指令,指令之间加入NOP指令,程序对他不做任何事情,继续向下执行,只是增加了程序的步数.每个程序必须有一个且只有一个END指令,表示程序的结束.PLC不断反复进行如下操作:输入处理,从程序的0步开始执行直到END指令,程序处理结束,接着进行输出刷新.然后开始循环操作.编程示例0 LD X0001 AND X0012 OUT Y0003 NOP4NOP5 LDI X0026 ANI X0037 OUT Y0018ENDMPS,MRD,MPP 指令指令解说助记符、名称功能可用软元件程序步MPS压栈运算存储1MRD读栈存储读出1MPP出栈存储读出与复位1嵌入式PLC中有11个栈空间,也就是说可以压栈的最大深度为11级.每使用一次MPS将当前结果压入第一段存储,以前压入的结果依次移入下一段.MPP指令将第一段读出,并且删除它,同时以下的单元依次向前移.MRD指令读出第一段,但并不删除它.其他单元保持不变.使用这三条指令可以方便多分支的编程.在进行多分支编程时,MPS保存前面的计算结果,以后的分支可以利用MRD,MPP从栈中读出前面的计算结果,再进行后面的计算.最后一个分支必须用MPP,保证MPS,MPP使用的次数相同.注意,使用MPP以后,就不能再使用MRD读出运算结果,也就是MPP必须放在最后的分支使用.MRD指令可以使用多次,没有限制.MPS连续使用的最多次数为11,但是可以多次使用.每个MPS指令都有一个MPP指令对应,MPP的个数不能多于MPS的个数.编程示例实例1:0 LD X0001 MPS2 AND X0013 OUT Y0004 MRD5 ANI X0026 OUT Y0017 MPP8 OUT Y0029 AND X00310 OUT Y00311 END该实例只使用一级堆栈,使用一个MPS指令压栈,一个MRD指令读栈,一个MPP指令出栈.实例2:0 LD X0041 MPS2 LD X0053 ORI X0064 ANB5 ANI X0076 OUT Y0047 MRD8 LDI X0109 AND X01110 LD X01211 ANI X01312 ORB13 ANB14 OUT Y00515 MPP16 AND X01417 OUT Y00618 MPS19 LDI X01520 OR X01621 ANB22 OUT Y00723 MPP24 AND X01725 OUT Y01026 END该实例使用一级两段堆栈,并且跟OR,ORB,ANB指令混合使用.实例30 LD X0001 MPS2 ANI X0013 MPS4 ANI X0025 MPS6 AND X0037 OUT Y0008 MPP9 ANI X00410 OUT Y00111 MPP12 ANI X00513 AND X00614 OUT Y00215 MPP16 AND X00717 MPS18 ANI X01019 OUT Y00320 MPP21 AND X01122 OUT Y00423END该实例使用三级堆栈,即堆栈嵌套三级.MC,MCR 指令指令解说助记符、名称功能可用软元件程序步MC主控公共串联点的连接线圈指令Y,M特殊M除外3MCR主控复位公共串联点的消除指令2当前面的触点接通时,就执行MC到MCR的指令.执行MC指令时,母线向MC触点后移动,执行MCR指令返回母线.使用MC指令时,嵌套级N的编号按顺序依次增大,也就是说只有使用N0,才能嵌套N1.相反使用MCR指令时,必须从大往小返回母线.最大嵌套级数为7级N6.通过不同的软元件Y,M,可以多次使用MC指令,如果使用相同的软元件,将同OUT指令一样,会出现双线圈输出.编程示例该实例只使用一个MC,MCR指令,嵌套级数也是1,可以进行7级嵌套.该实例中当X000接通时,执行MC,MCR之间的指令,当X000断开时,成为如下两种形式.现状保持:累积定时器的值,计数器的值,用SET/RST指令驱动的软元件.变为断开的元件:非累积定时器的值,用OUT指令驱动的软元件.0 LD M80001 OUT Y0002 LD X0003 MC N0 M06 LD X0017 OUT Y0018 LDP X00310 SET Y00211 LDF X00313 RST Y00214 LD X00515 OUT T0 K10 18 OUT T250 K10 21 OUT C0 K10 24 OUT C100 K1027 LD T028 OUT Y00329 LD T25030 OUT Y00431 LD C032 OUT Y00533 LD C10034 OUT Y00635 MCR N037 END。
基本位逻辑指令应用举例
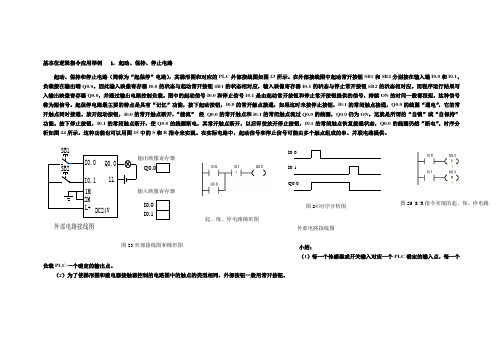
基本位逻辑指令应用举例 1. 起动、保持、停止电路起动、保持和停止电路(简称为“起保停”电路),其梯形图和对应的PLC 外部接线图如图23所示。
在外部接线图中起动常开按钮SB1和SB2分别接在输入端I0.0和I0.1,负载接在输出端Q0.0。
因此输入映像寄存器I0.0的状态与起动常开按钮SB1的状态相对应,输入映像寄存器I0.1的状态与停止常开按钮SB2的状态相对应。
而程序运行结果写入输出映像寄存器Q0.0,并通过输出电路控制负载。
图中的起动信号I0.0和停止信号I0.1是由起动常开按钮和停止常开按钮提供的信号,持续ON 的时间一般都很短,这种信号称为短信号。
起保停电路最主要的特点是具有“记忆”功能,按下起动按钮,I0.0的常开触点接通,如果这时未按停止按钮,I0.1的常闭触点接通,Q0.0的线圈“通电”,它的常开触点同时接通。
放开起动按钮,I0.0的常开触点断开,“能流” 经 Q0.0的常开触点和I0.1的常闭触点流过Q0.0的线圈,Q0.0仍为ON ,这就是所谓的“自锁”或“自保持”功能。
按下停止按钮,I0.1的常闭触点断开,使Q0.0的线圈断电,其常开触点断开,以后即使放开停止按钮,I0.1的常闭触点恢复接通状态,Q0.0的线圈仍然“断电”。
时序分析如图24所示。
这种功能也可以用图25中的S 和R 指令来实现。
在实际电路中,起动信号和停止信号可能由多个触点组成的串、并联电路提供。
小结:(1)每一个传感器或开关输入对应一个PLC 确定的输入点,每一个负载PLC 一个确定的输出点。
(2)为了使梯形图和继电器接触器控制的电路图中的触点的类型相同,外部按钮一般用常开按钮。
I0.0I0.1Q0.01M2ML+DC24VSB1SB2外部电路接线图1L起、保、停电路梯形图输入映像寄存器 输出映像寄存器图23外部接线图和梯形图图25 S/R 指令实现的起、保、停电路图24时序分析图I0.0I0.1 Q0.0外部电路接线图2. 互锁电路如图26所示输入信号I0.0和输入信号I0.1,若I0.0先接通,M0.0自保持,使Q0.0有输出,同时M0.0的常闭接点断开,即使I0.1再接通,也不能使M0.1动作,故Q0.1无输出。
02 第4章 PLC基本指令及其应用(1-2)
七、 基本逻辑指令举例
例1.简单的报警电路
控制系统中,若设备发生故障,则应及时报警,最常 用的报警方式是报警灯。当故障信号产生时,报警灯 应呈闪烁状态。 梯形图: I/O分配: I0.3 M 1.0 输入: ( R ) 1 报警信号开关S1:I0.0 I0.0 M 1.0 ( S ) 系统复位按钮:I0.3 1 M1.0 SM0.5 输出:故障报警灯:Q0.0 Q 0.0
2
一、 触点指令
10.立即触点指令
立即触点指令采用中断工作方式,将输入口的状态 立即读入PLC,不受扫描周期的影响。只能用于输 入继电器I。
LDI AI OI LDNI ANI ONI
I
/I
表示开始、串联和并联一常开立即触点
表示开始、串联和并联一常闭立即触点
3
二、 输出指令
1.输出指令: =
2.立即输出指令
LAD:
编号
I0.0 IN PT
类型
使能输入端
Tn
TONR ?ms
TON TOF TONR
1ms 10ms 100ms
设定值 1~32767
STL: TONR Tn, PT
时基
22
2.工作过程
① 当输入端(IN)接通时,定时器开始计时,当 输入端IN断开时,定时器保持当前值不变。 ② 当使能输入端IN再次接通时,则定时器当前值 在原保持值基础上再往上加计数。 ③ 当定时器的当前值大于等于设定值(PT)时, 定时器状态位置“1”;但定时器当前值继续增加, 一直增至最大值32767 。 ④ 以后既使输入端再断开,定时器也不会复位, TONR定时器需用复位指令R进行复位,复位后 定时器当前值清零,定时器位为OFF 。 用于对许多间隔的累计定时
第五章 S7-200PLC基本指令及应用
SB1 SB2 SB3 KM1 I0.0 I0.1 I0.2 L+ 1L 电源
Q0.0
FR
接触器联锁正反转控制电路
电动机的正反转控制
I/O接线图
SB2 正转互锁 反转互锁
KM1 I0.0
Q0.0
正转启动 SB2-I0.0
I2.1
Q1.1
I
I2.3
Q1.2
I
I0.1 I0.2
I
Q2.0 SI 2 Q2.0 RI 2
(三)立即置位和立即复位指令 立即置位指令:从指令所指出的位(bit)开始的N个物理输出点 被立即置位,同时,相应的输出映像寄存器的内容也被刷新。 立即复位指令:从指令所指出的位(bit)开始的N个物理输出点 被立即复位,同时,相应的输出映像寄存器的内容也被刷新。
例:
说明:立即I/O指令是直接访问物 理输入输出点的,比一般指令访 问输入输出映像寄存器占用CPU 时间要长,不能盲目使用。
四、边沿脉冲指令EU和ED
• 正跳指令 EU :检测到脉冲的每一次正跳变后,产生一个扫 描周期的脉冲。 • 指令格式: • 负跳变指令 ED :检测到脉冲的每一次负跳变后,产生一个 扫描周期的脉冲。 • 指令格式: • 应用举例:
SB3
KM2
FR
正转接触器 KM1-Q0.0
KM2 KM1
反转启动 SB3-I0.1
SB1
I0.1
Q0.1
反转接触器 KM2-Q0.1
停止 SB1-I0.2
I0.2 1L 电源
L+
电动机的正反转控制梯形图
I0.0
SB2 I0.0
plc常用的基本指令
plc常用的基本指令PLC常用的基本指令PLC(Programmable Logic Controller)是一种广泛应用于工业自动化领域的控制设备,它通过编程控制来实现对生产过程的监控和控制。
在PLC的程序中,常用的基本指令起着至关重要的作用,下面将介绍几个常用的基本指令及其功能。
一、常用的逻辑指令1. 与指令(AND):用于将两个逻辑量进行与运算,当两个逻辑量都为真时,输出为真。
在PLC程序中,与指令常用于实现多个条件同时满足时的控制逻辑。
2. 或指令(OR):用于将两个逻辑量进行或运算,当两个逻辑量中至少一个为真时,输出为真。
在PLC程序中,或指令常用于实现多个条件中至少一个满足时的控制逻辑。
3. 非指令(NOT):用于对一个逻辑量取反,当输入为真时,输出为假;当输入为假时,输出为真。
在PLC程序中,非指令常用于实现条件的取反操作。
二、常用的定时器指令1. 延时ON指令(TON):用于实现延时功能,当输入信号在规定的时间内保持为真时,输出信号才为真。
TON指令可以用于控制延时启动或延时关闭的设备。
2. 延时OFF指令(TOF):与TON指令相反,用于实现延时关闭功能。
当输入信号在规定的时间内保持为假时,输出信号才为真。
TOF指令常用于延时断电或延时停止设备。
三、常用的计数器指令1. 上升沿计数器指令(CTU):用于对输入信号的上升沿进行计数。
当输入信号从假变为真时,计数器的值加1。
CTU指令可以用于实现对事件发生次数的计数。
2. 下降沿计数器指令(CTD):与CTU指令相反,用于对输入信号的下降沿进行计数。
当输入信号从真变为假时,计数器的值减1。
CTD指令常用于实现对事件的倒计数。
四、常用的移位指令1. 左移位指令(SHL):用于将一个操作数向左移动指定的位数。
左移位指令常用于实现对数据的乘以2的幂次方运算。
2. 右移位指令(SHR):与SHL指令相反,用于将一个操作数向右移动指定的位数。
PLC的基本逻辑指令及举例
VS
详细描述
当任一输入信号为0时,NOR指令输出1; 当两个输入信号同时为1时,NOR指令输 出0。
XOR指令举例
总结词
XOR指令用于实现两个输入信号状态不同时的控制逻辑。
详细描述
当两个输入信号状态相同时,XOR指令输出0;当两个输入信号状态不同时,XOR指令 输出1。
详细描述
对单个条件进行取反操作,如果 输入为真,则输出为假;如果输 入为假,则输出为真。
举例
如果输入A为真,则NOT指令的 输出为假;如果输入A为假,则 NOT指令的输出为真。
NAND(与非)指令
总结词
01
当所有输入条件都为假时,输出才为真。
详细描述
02
NAND指令相当于NOT AND指令的组合,即当所有条件都满足
PLC的应用领域
制造业
自动化生产线、机器人控制、 加工中心等。
电力行业
变电站自动化、发电厂控制等 。
交通行业
铁路信号控制、交通监控系统 等。
化工行业
化工生产自动化、过程控制等 。
02
基本逻辑指令
AND(与)指令
总结词
当所有输入条件都为真时, 输出才为真。
详细描述
用于连接两个或多个条件, 当所有条件都满足时,输出 才为真。
PLC的基本逻辑指令 及举例
目录
• PLC简介 • 基本逻辑指令 • 举例
01
PLC简介
PLC的定义
PLC:可编程逻辑控制器,是一种专门用于工业控制的计算机 系统。
它采用一种可以编程的存储器,存储执行逻辑运算、顺序控 制、定时、计数和算术运算等操作的指令,并通过数字或模 拟的输入/输出接口控制各种类型的机械或生产过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一节 基本指令介绍
一、逻辑取及线圈驱动指令LD、LDI、OUT
说明:LD取指令,表示一个与输入母线相连接 的常开触点指令; LDI取反指令,表示一个与输入母线相连 接的常闭触点指令。
OUT线圈驱动指令,也称输出指令。操作目标元 件不可以是输入继电器X。
OUT 指令的操作元件是定时器T和计数器C时, 必须设置常数K(见下表)
4-6 4-7
实训二:电动机的正反停PLC控制
目的 熟悉PLC的I/O接线;熟悉基本逻辑指令; 熟悉三相异步电动机正反停控制的编程方法及其运行。 实训内容 实现三相异步电动机正反停PLC控制 实训步骤
接线(主回路和I/O接线图) I/O分配表 编程 运行程序 撰写实训报告
说明:2个以上串联连接的电路称为串联电路块,串联 电路块并联连接时,分支的开始用LD、LDI指令;后 面集中使用ORB指令时,电路块并联数小于8。
4-5
五、并联电路块的串联连接指令ANB
说明:2个以上并联连接的电路称为并联 电路块,并联电路块串联连接时,分支的 开始用LD、LDI指令;后面集中使用 ANB指令时,电路块并联数小于8。
六、多重输出指令MPS、MRD、MPP MPS、MPP必须成对使用
七、主控及主控复位指令MC、MCR
八、置位与复位指令SET、RST
九、脉冲输出指令PLS、PLF
十、空操作指令NOP 十一、程I
说明: AND(与指令)用于常开触点的串联; ANI(与非指令)用于常闭触点的串联连接。 可以多次重复使用。
4-2
三、触点并联指令OR、ORI
说明: OR(或)用于常开触点的并联;
ORI(或非)用于常闭触点的并联。
4-4
四、串联电路块的并联连接指令ORB