南方GPS静态测量及数据处理(实例)上课讲义
最新南方GPS静态测量及数据处理(实例)上课讲义

南方测绘石家庄GNSS产品蔡高峰GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。
主要用于建立各种级别的控制网。
进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。
在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。
使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点:1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度;2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米;3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等);4、地面基础稳定,易于点的保存;5、充分利用符合要求的旧有控制点。
GPS点位选好后,就可以架站进行静态数据采集了。
在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。
用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。
下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。
打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。
在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。
控制网等级设置为E级,基线剔除方式选着自动。
在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。
增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
《GPS静态测量》课件

GPS在地面变形监测中的 应用
介绍GPS如何用于监测地表的变 形和地质灾害。
GPS在交通运输中的应用
研究GPS如何改进交通运输系统 的效率和安全性。
GPS未来发展
GPS未来发展方向
探讨GPS技术在技术、应用 和精度等方面的未来发展趋 势。
GPS与其他导航技术的 比较
对比GPS与其他导航技术的 优劣和适用性。
1
GPS接收机与天线
2
讲解GPS接收机和天线在静态测量中的
选择和使用。
3
GPS数据处理及结果评定
4
Байду номын сангаас
讨论GPS测量数据的处理方法和如何评 定测量结果的准确性。
GPS静态测量流程
详细介绍GPS静态测量的步骤和流程。
GPS底座和流动站测量方法
介绍GPS测量中底座和流动站的布设方 法和测量技术。
GPS静态测量实验
1 静态测量实验设计
介绍GPS静态测量实验的设计考虑和方法。
2 实验数据采集与处理
讲解GPS测量实验中如何采集和处理测量数 据。
3 数据分析结果展示
4 实验成果评价
展示分析GPS测量数据后得出的结果和结论。
评价GPS静态测量实验的成果和可行性。
GPS测量应用案例
GPS在地质测量中的应用
探索GPS如何在地质测量中提供 高精度定位和监测数据。
GPS在社会发展中的作 用
分析GPS对社会发展、经济 和科技的影响和作用。
《GPS静态测量》PPT课 件
在本次PPT课件中,我们将介绍GPS静态测量的基础原理、流程和实验,以 及其在地质测量、地面变形监测和交通运输等领域中的应用,还展望了GPS 未来的发展方向。
GPSRTK测量及数据处理ppt课件
3)、作业方式:主要以下几种式:点连式、边连式、网 连式、混连式。
22
(1)点连式:
观测作业方式 所谓点连式就是在观测作业时, 相邻的同步图形间只通过一个公 共点相连。这样,当有3台仪器 共同作业时,每观测一个时段, 就可以测得2个新点,当这些仪 器观测观测了n个时段后,就可 以最多测得2n个新点。
7
一)、选点: • 为保证对卫星的连续跟踪观测和卫星信号的质
量,要求测站上空应尽可能的开阔,在10~15 高度角以上不能有成片的障碍物。 • 为减少各种电磁波对GPS卫星信号的干扰,在 测站周围约200m的范围内不能有强电磁波干扰 源,如大功率无线电发射设施、高压输电线等。 • 为避免或减少多路径效应的发生,测站应远离 对电磁波信号反射强烈的地形、地物,如高层 建筑、成片水域等。 • 为便于观测作业和今后的应用,测站应选在交 通便利,上点方便的地方。 • 测站应选择在易于保存的地方
没有多余基线
多余1条
16
(三)、GPS基线向量网的布网形式
GPS网常用的布网形式有以下几种:跟踪站式、会 战式、多基准站式、同步图形扩展式、单基准站式 1、跟踪站式: 1)、布网形式:若干台接收机长期固定安放在测站上, 进行常年、不间断的观测,即一年观测365天,一天 观测24小时,这种观测方式很象是跟踪站,因此,这 种布网形式被称为跟踪站式。 2)、特点:采用跟踪站式的布网形式布设GPS网时, 接收机在各个测站上进行了不间断的连续观测,观测 时间长、数据量大,而且在处理采用这种方式所采集 的数据时,一般采用精密星历,因此,采用此种形式 布设的GPS网具有很高的精度和框架基准特性。
GPS测量数据处理PPT教案

用 件外,其余均为二进制数据文件。为下一步预处理 的方便,必须将它们解译成直接识别的文件,必须
将数据文件标准化。
第1页/共90页
预处理
GPS数据预处理的目的是:
G ①对数据进行平滑滤波检验,剔除粗差;
P ②统一数据文件格式并将各类数据文件加工成标准
S 化文件;
测 量
③找出整周跳变点并修复观测值(整周跳变的修复见
别为观测时段开始和结束的时间。
第3页/共90页
2、卫星钟差的标准化
G
来自广播星历的卫星钟差具有多个数值,需要通过
P 多项式拟合求得唯一的,平滑的钟差改正多项式。钟差
S 的多项式形式为:
测
量
ts a0 a1(t t0) a2(t t0)2
(9-3)
原
理 式中a0,a1,a2为星钟参数,t0为星钟参数的参考历元。
及
应
用
k (t ) k (t ) i (t )
第16页/共90页
权的确定(5/8)
G
P
由矩阵表示为
S
:
测
(t) r(t) • (t)
量
原
式中各量表示为:
理
及
(t) i (t) j (t) k (t) T
应
用
r (t )
1 1
1 0
0 1
第17页/共90页
权的确定(6/8)
及 应
算(以解算的基线向量作为观测值进行无约
用 束平差)。平差后求得各GPS之间的相对坐标 差值,加上基准点的坐标值,求得各GPS点的
坐标。
第23页/共90页
3. 基线长度的精度
G P
基线处理后基线长度中误差应在标称精度
5.2.2第十八讲GPS静态测量实习 - GPS静态测量实习操作手册
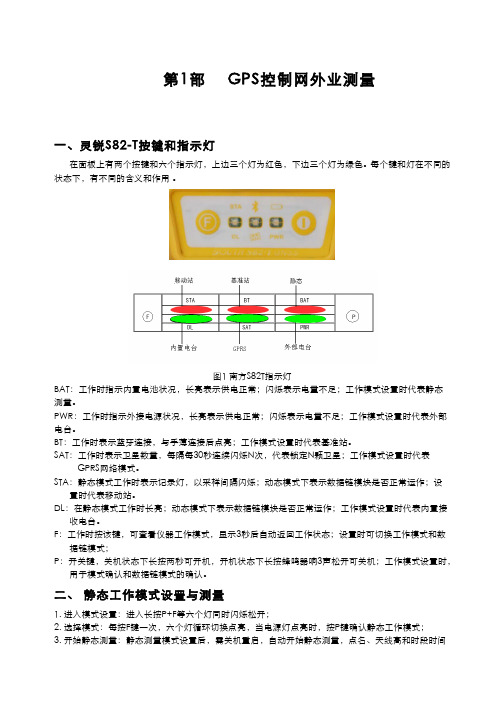
第1部GPS控制网外业测量一、灵锐S82-T按键和指示灯在面板上有两个按键和六个指示灯,上边三个灯为红色,下边三个灯为绿色。
每个键和灯在不同的状态下,有不同的含义和作用 。
图1 南方S82T指示灯BAT:工作时指示内置电池状况,长亮表示供电正常;闪烁表示电量不足;工作模式设置时代表静态测量。
PWR:工作时指示外接电源状况,长亮表示供电正常;闪烁表示电量不足;工作模式设置时代表外部电台。
BT:工作时表示蓝牙连接,与手薄连接后点亮;工作模式设置时代表基准站。
SAT:工作时表示卫星数量,每隔每30秒连续闪烁N次,代表锁定N颗卫星;工作模式设置时代表GPRS网络模式。
STA:静态模式工作时表示记录灯,以采样间隔闪烁;动态模式下表示数据链模块是否正常运作;设置时代表移动站。
DL:在静态模式工作时长亮;动态模式下表示数据链模块是否正常运作;工作模式设置时代表内置接收电台。
F:工作时按该键,可查看仪器工作模式,显示3秒后自动返回工作状态;设置时可切换工作模式和数据链模式;P:开关键,关机状态下长按两秒可开机,开机状态下长按蜂鸣器响3声松开可关机;工作模式设置时,用于模式确认和数据链模式的确认。
二、 静态工作模式设置与测量1. 进入模式设置:进入长按P+F等六个灯同时闪烁松开;2. 选择模式:每按F键一次,六个灯循环切换点亮,当电源灯点亮时,按P键确认静态工作模式;3. 开始静态测量:静态测量模式设置后,需关机重启,自动开始静态测量,点名、天线高和时段时间要在观测手薄中记录,传输数据至平差软件时输入。
注意:静态工作模式参数将采用先前设置的默认值,若需更改则要重新设置。
三、静态模式参数设置1、连接手簿与接收机(1)长按手薄电源键2秒打开手薄,长按GPS主机电源键2秒打开接收机,两机相距10米以内。
(2)在手薄上依次进入“我的设备”-“控制面板”-“电源”,在“内建设备”属性页中,勾选“启用蓝牙“和”启用音频节能“,点击”OK“返回到控制面板。
南方GPS静态数据处理步骤具体操作
南方GPS静态数据处理步骤具体操作静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置3. 打开南方测绘GPS数据处理软件进行数据平差处理:1) 点击“文件”――新建――新建项目,输入项目名称,坐标系统。
静态数据处理:H66关键状态,用灵锐助手传输;S82,S86分别用H82,H8 6助手传输(操作同灵锐助手)1. 传输数据――灵锐助手传输——USB口连电脑,打开助手工具,点击导入采集文件——选择存放的目标目录(注意修改传输路径,点名,时段,天线高)2. 修改采集间隔和高度截止角——点击仪器设置3. 打开南方测绘GPS数据处理软件进行数据平差处理:1) 点击“文件”――新建――新建项目,输入项目名称,坐标系统。
2) 点击“数据录入” ――增加观测数据文件――然后点坐标数据录入(增加已知点坐标)3) 点击坐标菜单栏“观测数据文件”――进行数据编辑――选种数据点鼠标右键键―― 剔除断断续续数据。
如下图4)基线解算――全部解算――处理不合格的基线为灰色,合格的红色,在网图上双击不合格的基线,弹出下面窗口,调高或调低高度截止角和历元间隔,再解算,直到方差比大于3。
5) 成果输出:平差报告(文本文档);可选择输出需要的内容网平差成果:输出word文档。
gps静态测量数据处理
gps静态测量数据处理一、基线解算的类型1、单基线解(1)定义:当有台GPS接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有条同步观测基线,其中最多可以选出相互独立的条同步观测基线,至于这条独立基线如何选取,只要保证所选的条独立基线不构成闭和环就可以了。
这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。
所谓单基线解算,就是在基线解算时不顾及同步观测基线间误差相关性,对每条基线单独进行解算。
(2)特点:单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS网的测设中。
2、多基线解(1)定义:与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。
(2)特点:多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。
(3)多站整体解(绝对坐标)(4)单基线解算的过程(5)利用基线解算软件解算基线向量的过程二、基线解算结果的质量评定指标1、单位权方差因子(1)定义:(2)实质:反映观测值的质量,又称为参考方差因子。
越小越好。
2、RMS - 均方根误差(1)定义:(2)实质:表明了观测值的质量,观测值质量越好,越小,反之,观测值质量越差,则越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。
3、数据删除率(1)定义:在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
(2)实质:数据删除率从某一方面反映出了GPS原始观测值的质量。
数据删除率越高,说明观测值的质量越差。
4、RATIO(1)定义:RATIO值为在采用搜索算法确定整周未知数参数的整数值时,产生次最小的单位权方差与最小的单位权方差的比值。
GPS测量及数据处理课件——第10章 GPS测量数据处理原理
ion 为电离层延迟;
trop 为对流层延迟;
f 为频率 f 的载波相位的波长;
N
m,n f
为整周未知数。
同步观测了k颗卫星。 双差观测值 :k-1 个; 未知数:
测站的坐标参数 3个 整周未知数参数k-1个
二、基线解算(平差)
基线解算的过程实际上主要是一个平差的过程,平差所采 用的观测值主要是双差观测值。
对流层水汽含量)
载波相位测量观测值
▪ 载波相位观测值
~ N Fri ( ) int i ( )
其中: N : 整周未知数
Fri ( ) : 不足一整周的部分 int i ( ) : 整周计数
▪ 实际观测值:
~ Fr i ( ) int i ( )
基线解算一般较为常用的差分观测值为双差观 测值。双差观测方程可以表示为下面的形式:
dd( f ) v f
dd() dd(ion ) dd(trop ) f
N
m,n f
其中:
dd(...)为双差分算子(在测站 i,j 和卫星 m,n 间求差);
dd ( f ) 为频率 f 的双差载波相位观测值;
v f 为频率 f 的双差载波相位观测值的残差(改正数);
为观测历元 t 时的站星距离; 某一历元中 :
GPS基线向量是GPS同步观测的直接结果, 也是进行GPS网平差,获取最终点位的观测值。
一、观测值 二、基线解算(平差)
一、观测值
主要观测值:
载波相位观测值(原始观测值(非差观测值)) 差分观测值(单差、双差或三差))
辅助观测值:
伪距观测值,多普勒观测值
其它数据
测站信息(仪器类型,天线类型,天线高信息等) 星历(精密星历或广播星历) 气象数据(温度,湿度,气压;或干温,湿温,气压;倾斜的
GPS测量数据处理一PPT演示文稿
应用领域
测绘
t0
N
0
Fr 0
首次观测:
0 Fr( )0 以后的观测:
i Int( )i Fr( )i 通常表示为: 整周计数 ~ N0 Int( ) Fr( )
整周模糊 度
不足一周
载波相位观测值 的部分
5
Fr i Int() i N 0
GPS相关知识 > GPS定位基本原理
优点
可直接测定卫星到接收机之间的距离 不存在模糊度的问题 抗干扰能力强
缺点
精度低
C/A码(测距时有模糊度)
应用领域
导航、低精度测量等
P码
4
GPS相关知识 > 载波相位
ti
测量方法
通过载波测定。测定载波 的相位,从而获得卫星到 接收机之间的距离。
优点
精度高
缺点
存在模糊度问题,无法直 接测定卫星到接收机之间 的距离
1
2
GPS相关知识 > 观测值的类型
伪距
C/A码伪距 P(Y)码伪距
载波相位
L1载波的相位 L2载波的相位
多普勒频移(多普勒计数)
L1载波的多普勒频移(多普勒计数) L2载波的多普勒频移(多普勒计数)
3
GPS相关知识 > 伪距
测量方法
通过测距码测定。测定信号的传播时间,从而获得 卫星到接收机之间的距离。
应用领域:用于低精度导航。
相对定位
定位模式:多机同步观测,确 定各机之间的相对位置(基线 向量)。
特点:定位作业复杂,定位精 度高,可达厘米 – 亚毫米级。
应用领域:用于高精度导航、 测绘等。
9
GPS相关知识> GPS测量定位的类型
GPS静态测量及数据处理ppt课件
20
3.6 GPS网的图形设计
同步网是GPS网的一个单元。
由多个同步网相互连接构成了完整的GPS网,这个网也称异 步网。
在上述三种连接方案中,点连式工作量最小, 但同无步重网复的基不线同检连接核方;式边会连出式现工不同作的量异最步大网,的检网形核结条构件。亦异 最步多网,中结,构由也非最同步稳观定测,获定得位的精基线度向较量高构;成混的连闭合式环比称较为灵异 活步,观工测作环量,与简检称异核步条环件。比较适中。在选择测设方案时, 应在从异所步具网备中的,接同步收网机之数间量的和连精接方度式、有工以作下量三大种:小、卫星 运行 状点连态式、:同测步区网条之间件仅等有一方点面相进连接行的权异步衡网。称为点连式异步网。
9
3.1 GPS网的精度分级
GPS网的精度设计
精度指标通常是以相邻点间弦长的标准差来表示, 即用GPS边长的固定误差a和比例误差b表示
a2 (b d 106 )2
在具体布设中,可以分级布设,也可以越级布设, 或布设同级全面网。
10
3.2 GPS点的密度
《规范》和《规程》对GPS网中两相临点间距离视 其需要作出了规定:相邻点间最小距离应为平均距离 的1/2~1/3;最大距离应为平均距离的2~3倍。
(2)测区地形图或平面图
(3)测区已知控制点点之记
(4)测区已知控制点坐标
(5)技术规范
①《全球定位系统GPS测量规范》 GB/T 18314-2009(简称《规 范》)
②《全球定位系统城市测量技术规 程》CJJ 73-97(简称《规程》)
③《公路全球定位系统(GPS)测 量规范》JTJ/C 066-98
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南方G P S静态测量及数据处理(实例)
南方测绘石家庄GNSS产品蔡高峰
GPS静态测量,是利用测量型GPS接收机进行定位测量的一种。
主要用于建立各种级别的控制网。
进行GPS静态测量时,认为GPS接收机的天线在整个观测过程中的位置是静止,在数据处理时,将接收机天线的位置作为一个不随时间的改变而改变的量,通过接收到的卫星数据的变化来求得待定点的坐标。
在测量中,GPS静态测量的具体观测模式是多台(3台以上)接收机在不同的测站上进行静止同步观测,时间由40分钟到十几小时不等。
使用GPS进行静态测量前,先要进行点位的选择,其基本要求有以下几点:
1、周围应便于安置接收设备和操作,视野开阔,市场内障碍物的高度角不宜超过15度;
2、远离大功率无线电发射源(如电视台、电台、微波站等),其距离不小于200米;远离高压输电线和微波无线电信号传送通道,其距离不小于50米;
3、附近不应有强烈反射卫星信号的物件(如大型建筑物、大面积水域等);
4、地面基础稳定,易于点的保存;
5、充分利用符合要求的旧有控制点。
GPS点位选好后,就可以架站进行静态数据采集了。
在采集静态数据时,一定要对中整平,在采集的过程中需要做好记录,包括每台GPS各自所对应的点位、不同时间段的静态数据对应的点位、采集静态数据时GPS的天线高(S86量测高片高,S82量斜高)。
用GPS采集完静态数据后,就要对所采集的静态数据进行处理,得出各个点的坐标。
下面以为临城建设局做的GPS静态测量为例,介绍静态数据处理的过程。
打开GPS数据处理软件,在文件里面要先新建一个项目,需要填写项目名称、施工单位、负责人,并设置坐标系统和控制网等级,基线的剔除方式。
在这里由于利用的旧有控制点所属的坐标系统是1954北京坐标系3度带,因此坐标系统设置成1954北京坐标系3度带。
控制网等级设置为E级,基线剔除方式选着自动。
在数据录入里面增加观测数据文件,若有已解算好的基线文件,则可以选择导入基线解算数据。
增加观测数据文件后,会在王图显示窗口中显示网图,还需要在观测数据文件中修改量取的天线高和量取方式(S86选择测高片,S82选择天线斜高)。
修改完观测数据文件里的量取的天线高和量取方式,就要进行基线解算了。
在基线解算中点击全部解算,软件就会自动解算基线,若基线解算合格就会显示为红色,解算不合格就会显示为灰白色。
在基线简表窗口中可以查看解算的结果。
解算不合格的基线需要进行调整,在网图中双击不合格的基线会弹出基线状况对话框,在该对话框中调整高度截止角和历元间隔后再解算,直至合格为止。
原来的高度截止角为20,现在调整成15后,解算后基线已经合格了,由原来的灰白色变成了红色。
基线全部解算合格后,就需要看闭合环是否合格,直接点击左侧的闭合环就可进行查看。
若闭合环不合格,则还需要调整不合格闭合环中的基线,使得闭合环和基线全都合格;若闭合环合格,就要录入已知点的坐标数据,然后进行平差处理。
要录入坐标数据可以在数据输入中点击坐标数据录入,在弹出的对话框中选择要录入坐标数据的点,录入坐标数据;或者在测站数据中选择对应的点直接录入坐标数据。
录入完坐标数据就可以进行平差处理了,在平差处理中依次点击自动处理、三维平差、二维平差、高程拟合,就能得到平差结果,这包括组网、三维自由(约束)网平差、二维网约束平差、高程拟合平差、平差成果表和7参数结果,这可以在成果输出窗口里查看。
其中主要是需要平差成果表和7参数结果。
平差报告可以打印或输出(文本文档格式)。