平面四杆机构的基本类型
平面四杆机构类型介绍课件

03
应用:汽车转向机构、自行车脚踏板机构等
04
优点:结构简单,运动可靠,易于实现各种运动规律
双摇杆机构
组成:两个摇杆和 一个连杆 1
特点:结构简单,运 动灵活,但运动轨迹 4 复杂,设计难度较大
运动:两个摇杆 2 可以同时摆动,
连杆随之运动
应用:汽车转向 3 系统、飞机起落
架等
3
平面四杆机构的 应用
构
05
平行四杆机构:由四个平行杆组成的机构
06
空间四杆机构:由四个空间杆组成的机构
平面四杆机构的特点
由四个构件组成,其中至少有一个构件是活 动构件 构件之间通过转动副或移动副连接
机构的运动是通过构件之间的相对运动实现 的
机构的运动具有确定的运动规律,可以通过 分析机构的几何关系和运动学原理来研究
2
平面四杆机构的 类型
曲柄摇杆机构
02
03
04
优点:结构简单、运动 平稳、易于控制和实现 自动化
应用:广泛应用于各种 机械设备中,如汽车、 飞机、船舶等
特点:曲柄和摇杆的 运动轨迹为圆弧
01
组成:曲柄、摇杆、 连杆和机架
双曲柄机构
01
组成:两个曲柄和一个连杆
02
特点:两个曲柄可以同时转动,连杆只能做摆动运动
能满足强度要求
设计合理的传动比,
2
避免过大的传动比导
致机构过载
优化结构设计,减少
3
应力集中和疲劳破坏
满足加工工艺要求
01
04
设计机构时,要考虑到成 本控制的要求,如采用何 种材料、加工方法等。
03
设计机构时,要考虑到维 修工艺的要求,如采用何 种维修方法、维修工具等。
考研机械原理试卷真题
考研机械原理试卷真题一、选择题(每题2分,共20分)1. 机械原理中,机构的自由度是指:A. 机构的零件数B. 机构的运动副数C. 机构能够实现的独立运动数D. 机构的约束数2. 以下哪个不是平面四杆机构的基本类型?A. 双曲柄机构B. 双摇杆机构C. 曲柄摇杆机构D. 曲柄滑块机构3. 机械系统中,传动比是指:A. 驱动轮与从动轮的转速比B. 驱动轮与从动轮的直径比C. 驱动轮与从动轮的周长比D. 驱动轮与从动轮的力矩比4. 在机械设计中,静平衡是指:A. 零件在静止状态下的平衡B. 零件在运动状态下的平衡C. 零件在受到外力作用时的平衡D. 零件在受到内力作用时的平衡5. 以下哪个是机械传动中常见的传动方式?A. 齿轮传动B. 液压传动C. 磁力传动D. 风力传动6. 机械原理中,运动副的类型不包括:A. 转动副B. 滑动副C. 滚动副D. 振动副7. 机械原理中,平面机构的自由度计算公式是:A. F = 3n - 2p - φB. F = 3n - 2p + φC. F = 2n - p - φD. F = 2n - p + φ8. 以下哪个不是机械原理中常见的运动副?A. 铰链B. 螺旋C. 滑块D. 凸轮9. 机械原理中,平面四杆机构的死点位置是指:A. 曲柄的最低点B. 曲柄的最高点C. 曲柄的平衡位置D. 曲柄的任何位置10. 在机械设计中,动平衡是指:A. 零件在静止状态下的平衡B. 零件在运动状态下的平衡C. 零件在受到外力作用时的平衡D. 零件在受到内力作用时的平衡二、简答题(每题10分,共30分)1. 简述平面四杆机构的基本特性及其应用场景。
2. 描述机械传动比的计算方法及其在机械设计中的重要性。
3. 解释静平衡和动平衡的区别,并举例说明它们在机械设计中的应用。
三、计算题(每题25分,共50分)1. 已知一平面四杆机构,其中AB为曲柄,BC为连杆,CD为摇杆,AD为机架。
当AB的长度为200mm,BC的长度为300mm,CD的长度为400mm,求该机构的最小传动角,并说明其意义。
四杆机构的基本类型
四杆机构的基本类型
四杆机构是一种常见的机械手臂,由四根轴和四个活动构成,能够实现六自由度(6-DOF)运动,是一种应用广泛的机械臂结构。
其设计原理是:在定义基准点和方向后,通过改变四根轴的转动和夹角,改变关节的位置和姿态,实现不同位置的机械物体的抓取和定位。
常见的四杆机构分为两种:1)串联式四杆机构。
所谓串联式,指的是由四根轴拼接连接而成,主轴的自由度有四个,穿越关节的自由度有两个,其中,一个是回转轴,另一个是摆动轴。
串联式四杆机构的设计简单灵活,造价低廉,对空间和负载要求比较低,是一种广泛应用的机械服务结构。
2)平行式四杆机构。
所谓平行式,指的是每个关节的轴线都是平行的,从而可以减少回转关节拐角处的摩擦,从而提高机械精度和使用寿命,但由于四杆架的整体尺寸较大,常见于较大型的占地面积的机械服务机械上。
四杆机构的活动臂可以实现六自由度(6-DOF)运动,具有一至六自由度的灵活性。
其常见应用有:机器人手臂、切割机、焊接机、注塑机、主轴维修机械等等。
机械臂做出在四杆机构的比较复杂的多DOF运动,需要将四个轴的速度和位置进行逻辑控制,而对应的驱动程序也复杂得多,需要将控制系统与机械系统、位置传感器进行一定的结合。
机械级精度高,性能稳定,能够满足人的要求,由于其具有高精度的性能,深受应用于精密复杂的工业生产活动中。
简述平面四杆机构的类型特点和应用
简述平面四杆机构的类型特点和应用一、平面四杆机构的类型:1. 平衡四杆机构:该机构有能力保持平衡,即使受到外部干扰也能够回到原来的位置。
这种机构被广泛用于稳定系统和开放环境。
2. 驱动四杆机构:该机构可以转化旋转运动为线性运动或反之。
这种机构广泛应用于机械工程、模具制造和自动化工程中。
3. 可逆四杆机构:该机构可以逆向工作,在不同的任务中灵活应用。
这种机构被广泛用于机器人工程和自动化工程中。
4. 变位四杆机构:该机构可以在不同位置自动调整,以适应不同的应用需求。
这种机构被广泛用于自动化机械和精密制造领域。
二、平面四杆机构的特点:1. 平面四杆机构可以转换不同类型的运动,包括旋转、线性、摆动等。
2. 平面四杆机构结构简单,易于制造和维护,具有良好的可靠性和稳定性。
3. 平面四杆机构可以通过组装多个单元来实现更高级别的机械结构,例如机器人、自动化系统等。
4. 平面四杆机构广泛应用于机械、汽车、制造、物流、自动化等领域,并逐渐成为机器人、智能装备的重要组成部分。
三、平面四杆机构的应用:1. 发动机连杆机构:由于发动机需要将旋转运动转化为线性运动来驱动汽车轮胎,平面四杆机构被广泛应用于汽车发动机的连杆机构中。
2. 物流设备:平面四杆机构可以逆向工作,可以将线性运动转化为旋转运动,这使得物流设备可以保持高速和精度,如自动包装线、调料机等。
3. 机械手:平面四杆机构的结构简单,稳定性好,这使得它成为机器人手臂的优选部件之一,广泛应用于各个制造领域。
4. 印刷机械:平衡四杆机构可以使印刷平台始终稳定,特别是在高速印刷时,它可以保持印刷品的精度和质量。
5. 飞控系统:平衡四杆机构被广泛应用于飞控系统的调节器中,以帮助控制飞行器的稳定性。
总的来说,平面四杆机构具有结构简单、稳定性好、运动特性多样等特点,可以在各个行业发挥重要的作用。
平面四杆机构的三种基本类型
平面四杆机构的三种基本类型
1.平面四杆机构的基本类型
平面四杆机构是机械驱动系统中的一种常见结构,相对于其他机构而言,它具有简单结构,容易制造、安装和维护等特点,可以满足不同的机械驱动需求。
平面四杆机构可以分为三大类:摆动运动的活动类四杆机构、运动类四杆机构以及悬臂类四杆机构。
(1)摆动运动的活动类四杆机构
摆动运动的活动类四杆机构是一种典型的四杆机构,它具有一个主动类似于摆动运动的活动部件,一个棍杆组成,它一端连接固定在机械设备上的活动部件,另一端连接执行器,它可以通过输入信号来控制四杆机构的运动方向和速度。
(2)运动类四杆机构
运动类四杆机构是一种典型的四杆机构,它由一个主杆、两个连接杆、一个活动杆和一个联动机构组成,它可以实现前后、左右运动,可以通过改变运动方向和速度,来达到控制任务的目的。
(3)悬臂类四杆机构
悬臂类四杆机构是一种新型的四杆机构,它的结构类似悬臂梁,由一个主杆、两个连接杆、一个支点和一个活动杆组成,它可以实现前后、左右悬臂运动,可以通过改变运动方向和速度,来达到控制任务的目的。
- 1 -。
§8—2平面四杆机构的类型及应用
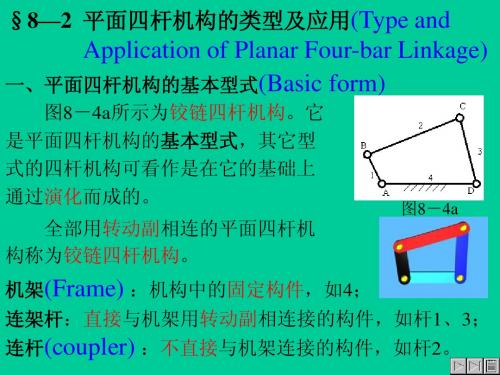
图8-3
振动筛机构
在双曲柄机构中,有两种特例: 1)平行四边形机构:其相对两杆平行且相等,如图8-7a 所示。
其运动特性是:
①两曲柄作等速同向转动; ②连杆作平移运动。
图8-7a
应用实例: 图8-8所示的机车车轮的联动机构就利用了特性① ;
图8-8
如图所示的摄影平台升降机构和图8-9 b所示的播种 机料斗机构则是利用了特摇杆长度相等。 图8-12b所示的汽车、拖拉机前轮的转向机构。
图8-12b
二、平面四杆机构的演化型式
(Evolution of Planar Four-bar Linkage)
1、四杆机构演化的目的: 满足运动方面的要求、改善受力状况、满足结构设 计上的要求。 2、四杆机构的演化方法: 1)改变构件的形状和运动尺寸
在图8-14,b所示的曲柄滑块机构中,B点相对于C 点的运动轨迹是αα。
连杆2做成滑块
αα 做成导轨
图8-14 b)
曲柄滑块机构 演化
图8-15 a) 双滑块机构
连杆长→∞,
αα →直线
图8-15 b)
正弦机构s=LABsinψ
2)改变运动副的尺寸
扩大转动副B的半径
使之超过曲柄的长度
图8-16 a) 图8-16 b) 演化 偏心轮机构
摇杆3做成滑块 ββ做成导轨
具有曲线导 轨的曲柄滑 块机构
图8-13 a )
图8-13 b )
图8-13 a )
摇杆长→∞, ββ →直线 摇杆3 →滑块, 转动副D →移动副 偏置(eccentric or e≠0
offset)
对心(in-line) e=0 图8-14 曲柄滑块机构
曲柄滑块机构(slider-crank mechanism)常用在冲床、 内燃机、空压机等机械中。
平面四杆机构的基本类型及应用-精品文档
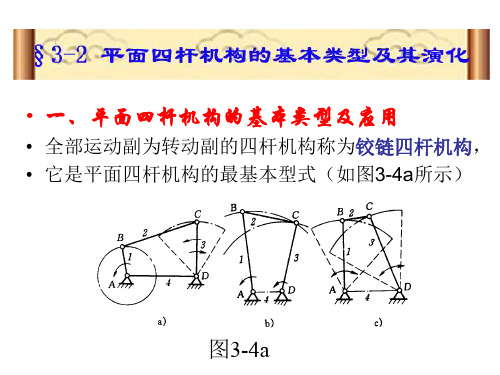
图3-16b
图3-19
图3-20
• 若选用曲柄滑块机构中滑块3作机架(图316c),即演化成移动导杆机构(或称定块 机构)。 • 它应用于手摇卿筒(图3—21)和双作用式 水泵等机械中。
图3—21
图3-16c
(3)变化双移动副机构的机架
• 在图3-15和图3-22a所示的具有两个移动副的四杆机 构中,是选择滑块4作为机架的,称之为正弦机构, 这种机构在印刷机械、纺织机械、机床中均得到广 泛地应用,例如机床变速箱操纵机构、缝纫机中针 杆机构(图3—22d);
铰链四杆机构可分为以下三种类型
1、曲柄摇杆机构
• 铰链四杆机构的两连架杆中一个能作整 周转动,另一个只能作往复摆动的机构。
2、双曲柄机构
铰链四杆机构的两连架杆均能作整周转 动的机构。
• 在双曲柄机构中,若相对两杆平行相 等,称为平行双曲柄机构(图3-9)。 这种机构的特点是其两曲柄能以相同 的角速度同时转动,而连杆作平行移 动。图3-10a所示机车车轮联动机构 和图3-10b所示的摄影平台升降机构 均为其应用实例。
图3-15
图3—22
• 若选取构件1为机架(图3-22b), 则演化成双转块机构,它常应用 作两距离很小的平行轴的联轴器, 图3-22e所示的十字滑块联轴节为 其应用实例;
图3-22b
图3-22e
• 当选取构件3为机架(图3-22c)时, 演化成双滑块机构,常应用它作椭圆 仪(图3—22f)。
图3-22
图 3-11
3、双摇杆机构
双摇杆机构:铰链四杆机构中的两连架杆均不能作 整周转动的机构。
如 图 3 - 12 所 示 鹤 式 起 重 机 的 双 摇 杆 机 构 ABCD,它可使悬挂重物作近似水平直线移动, 避免不必要的升降而消耗能量。在双摇杆机构 中,若两摇杆的长度相等称等腰梯形机构,如 图3—13中的汽车前轮转向机构。
机械原理NO[1].12 8-3 平面四杆机构的基本知识--2
![机械原理NO[1].12 8-3 平面四杆机构的基本知识--2](https://img.taocdn.com/s3/m/f4a7b4b6e87101f69f319596.png)
工程上也常利用死点来工作。
夹具
机械原理
第8章 平面连杆机构及其设计
四、铰链四杆机构的连杆曲线 Coupler-curve of four-bar linkages
在四杆机构运动时,其连杆平面上的每一点均描绘出一条曲线, 称为连杆曲线(coupler curves)
B型
水滴型
面包型
瘦长型
伪椭圆型
三角型
机构尺寸: 各运动副之间的相对位置尺寸(或
角度)以及描绘连杆上某点(该点实现 给定运动轨迹)的位置参数等。
平面连杆机构设计的基本要求:
1。要求从动件满足预定的运动规律要求(函数生成问题); 2。满足预定的连杆位置要求(刚体导引问题); 3。满足预定的轨迹要求(轨迹生成问题)。
机械原理
第8章 平面连杆机构及其设计
最多能解五个精确位置,多于五个位置只能近似求解,少于五个位置可有无穷解。
机械原理
第8章 平面连杆机构及其设计
2。按预定的运动规律设计四杆机构(函数综合)
1)按预定的两连架杆对应位置设计四杆机构:
要求: 3i f (1i ) , i =1、2、…、k
(已知条件)
取杆长的相对变量 a/a=1 , b/a=l, c/a=m , d/a=n 为设计参数,不影响各构件的相对 转角关系,故杆长的设计变量为l、m、 n ,再加上0 、0共5个设计变量。
• (2)改变运动副的尺寸;
• (3)选不同的构件为机架;
• (4)运动副元素的逆换。
机械原理
第8章 平面连杆机构及其设计
• 4.平面四杆机构有曲柄的条件: • (1)各杆长满足杆长条件:最短杆与最长杆的长度之和
应小于或等于其余两杆长度之和; • (2)最短杆为连架杆或机架。 • 5.急回运动及行程速度变化系数: • (1) 急回运动: • 当连机构的主动件为等速回转时,从动件空回行程的平
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平面四杆机构是一种常见的机械结构,由四个连杆组成,可以实现转动和传递力量。
根据其连杆排列方式和运动特点,平面四杆机构可以分为以下几种基本类型:
四杆平行机构:四个连杆平行排列的机构,常见的形式是平行四边形。
四杆平行机构具有简单结构和稳定性好的特点,在工程和机械设计中广泛应用。
四杆平行滑块机构:四个连杆中有一个是滑块,可以在平面内作直线运动。
这种机构常见的应用是在平面上实现直线运动,如印刷机的工作台。
四杆旋转机构:四个连杆可以围绕一个固定点旋转,形成一个封闭的轨迹。
这种机构常见的形式是摇杆机构或曲柄摇杆机构,常用于发动机的活塞运动转化为旋转运动。
四杆转动滑块机构:四个连杆中有一个是滑块,可以在平面内作转动运动。
这种机构常见的应用是实现旋转运动和直线运动的转换,如某些机床的进给机构。
这些基本类型的平面四杆机构都具有不同的运动特点和应用场景。
根据具体的工程需求和设计要求,可以选择合适的平面四杆机构类型,并进行优化和改进,以满足特定的运动和力学要求。