第五章 线性代数方程组的直接解法5
线性方程组直接解法

在求解线性规划问题时,高斯消元法 可以用于求解单纯形表中的方程组,
从而得到最优解。
矩阵求逆
通过高斯消元法可以将一个可逆矩阵 化为单位矩阵,从而求出其逆矩阵。
计算机图形学
在计算机图形学中,高斯消元法可以 用于求解三维变换矩阵,实现图形的 旋转、平移等操作。
2023
PART 03
克拉默法则
REPORTING
2023
PART 02
高斯消元法
REPORTING
高斯消元法的基本思想
通过对方程组的增广矩阵进行初等行 变换,将其化为行阶梯形矩阵,然后 逐步回代求解未知数。
高斯消元法的基本思想是将方程组中 的未知数逐一消去,从而得到一个易 于求解的三角形方程组。
高斯消元法的步骤
将方程组的增广矩阵写出来, 并对其进行初等行变换,化为 行阶梯形矩阵。
未来研究方向
高性能计算
随着计算资源的不断发展,研究如何 在高性能计算环境中更有效地应用直 接解法和迭代解法具有重要意义。
预处理技术
研究更有效的预处理技术,以 改善迭代解法的收敛性和稳定 性。
并行化与分布式计算
探索并行化和分布式计算技术 在解线性方程组中的应用,以 提高计算效率和可扩展性。
自适应算法
开发能够自适应地选择最合适 算法和参数的线性方程组求解 器,以提高求解效率和精度。
2023
THANKS
感谢观看
https://
REPORTING
从行阶梯形矩阵中,选取一个 主元,通过行变换将主元所在 的列的其他元素消为0。
重复上述步骤,直到所有未知 数都被消去,得到一个上三角 形方程组。
从上三角形方程组中,逐个回 代求解未知数。
第五章解线方程组的直接方法
第五章解线性方程组的直接方法⏹预备知识⏹消元法⏹矩阵分解法⏹追赶法⏹误差分析线性代数是数值计算方法的基础,学习它对数值计算方法其它内容的学习会有很大的帮助。
无论是插值公式的建立,还是微分方程的离散格式的构造,其基本思想都是转化为代数问题来处理,即归结为解线性方程组。
MATLAB的强大功能是建立在矩阵和向量运算基础上的,线性代数的学习也可以大大提高对MATLAB的掌握程度。
线性方程组的基本解法:直接解法:经过有限步算术运算,在不考虑舍入误差的情况下求得方程组的精确解;迭代解法:用某种极限过程逐步逼近方程组的精确解。
5.1 预备知识: 矩阵和向量及线性方程组的解方阵:m=n 的矩阵;零矩阵:所有元素都为0的矩阵。
在MATLAB中零矩阵由zeros 命令定义。
如A=zeros(m,n)定义一个m×n 零矩阵,n×n 零矩阵可以用命令A=zeros(n)定义。
单位矩阵:所有对角元为1而其余元素均为0的方阵。
单位矩阵记为I。
在MATLAB 中单位矩阵由eye命令定义。
如A=eye(n)定义一个n阶单位矩阵。
元素都是1的矩阵:在MATLAB中元素都是1的矩阵由ones命令定义。
如A=ones(m,n)定义一个m×n阶的元素都是1的矩阵。
矩阵的加法和减法:行列数相同的矩阵之间才可以进行加法和减法。
矩阵的乘法:若A的行数和B的列数相等,则它们可以相乘C=AB。
其中C的第i 行第j列元素等于A的第i行和B的第j列对应元素乘积之和。
逆矩阵:若两个方阵A和B满足:AB=I且BA=I,则称A和B互为逆矩阵。
在MATLAB 中M的逆矩阵由inv(M) 命令计算。
对于任一非奇异矩阵都可用inv命令计算其逆矩阵。
若MATLAB拒绝计算一个方阵的逆矩阵,则此矩阵一定是奇异的。
一个奇异矩阵的行列式是0(或者至少有一行(列)可以用其它行(列)通过多次加法和减法表示)。
行列式:方阵A的行列式是一个标量值,用det(A)或|A|表示。
第五章 解线性代数方程组
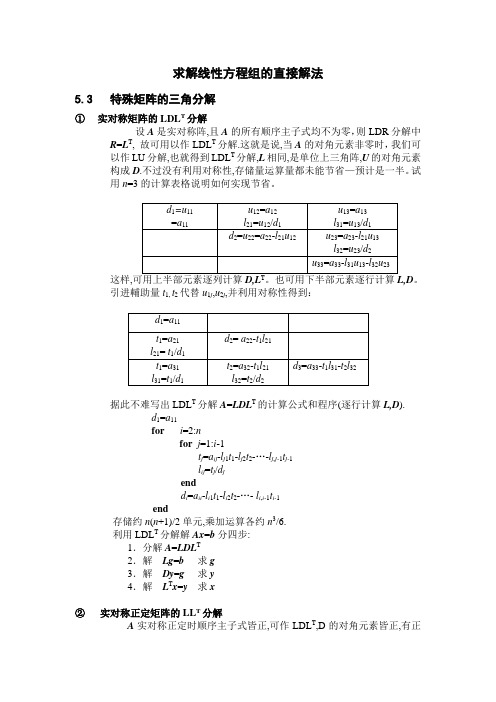
求解线性方程组的直接解法5.3 特殊矩阵的三角分解① 实对称矩阵的LDL T 分解设A 是实对称阵,且A 的所有顺序主子式均不为零,则LDR 分解中R =L T , 故可用以作LDL T 分解.这就是说,当A 的对角元素非零时,我们可以作LU 分解,也就得到LDL T 分解,L 相同,是单位上三角阵,U 的对角元素构成D .不过没有利用对称性,存储量运算量都未能节省—预计是一半。
试用n =3的计算表格说明如何实现节省。
这样,。
引进輔助量t 1, t 2代替u 1j ,u2j ,并利用对称性得到:据此不难写出LDL T 分解A =LDL T 的计算公式和程序(逐行计算L,D ).d 1=a 11for i =2:nfor j =1:i -1t j =a ij -l j 1t 1-l j 2t 2-…-l j ,j-1t j-1l ij =t j /d j end d i =a ii -l i 1t 1-l i 2t 2-…- l i ,i-1t i-1 end存储约n (n +1)/2单元,乘加运算各约n 3/6. 利用LDL T 分解解Ax =b 分四步: 1.分解A =LDL T 2.解 Lg =b 求g 3.解 Dy =g 求y 4.解 L T x =y 求x② 实对称正定矩阵的LL T 分解A 实对称正定时顺序主子式皆正,可作LDL T ,D 的对角元素皆正,有正的平方根。
因此有LL T 分解A =LL T ,L 下三角阵,对角元素皆正,是LDL T 中的LD 1/2.乃可用上半部元素逐列计算L T .l 11=a 111/2 for i =2:nfor j =1:i -1l ij =(a ij -l i 1l j 1-l i 2l j 2-…-l i ,j-1l j ,j-1)/d jjend2/121,2221)(-----=i i i i ii ii l l l a l end存储量,运算量同LDL T 分解,但要n 次求平方根.利用LL T 分解解Ax =b 分三步:1.分解A =LL T 2.解 Lg =b 求g 3.解 L T x =g 求x③ 三对角方程组的追赶法消去法或LU 分解用于三对角方程组有特殊形式,即称追赶法.设Ax =f : b 1x 1+ c 1x 2=f 1a i x i-1+b i x i +c i x i+1=f i i=2,3,n -1 a n x n-1+b n x n =f nA 是三对角阵,则L ,U 同样结构.L 的对角元素为α2,α3,…,αn ,U 的对角元素为β1,β2,…,βn ,上对角元素同A .1.分解A =LU : β1= b 1,αi =a i /βi-1,βi = b i -αi c i -1, i=2,3,…,n 2.解 Lg =f 求g : g 1=f 1,g i =f i -αi f i -1, i=2,3,…,n 3.解 U x =g 求x : x n =g n /βn ,x i =(g i -c i x i +1)/βi , i=n -1,n -2,…,1编程时,A 可用三个一维数组,f 用一个一维数组.L ,U 存入A 。
现代科学工程计算基础课后答案
现代科学工程计算基础课后答案《现代科学与工程计算基础》较为详细地介绍了科学与工程计算中常用的数值计算方法、基本概念及有关的理论和应用。
全书共分八章,主要内容有误差分析,函数的插值与逼近,数值积分与数值微分,线性代数方程组的直接解法与迭代解法,非线性方程及非线性方程组的数值解法,矩阵特征值和特征向量的数值解法,以及常微分方程初、边值问题的数值解法等。
使用对象为高等院校工科类研究生及理工科类非“信息与计算科学”专业本科生,也可供从事科学与工程计算的科技工作者参考。
《现代科学与工程计算基础》讲授由浅人深,通俗易懂,具备高等数学、线性代数知识者均可学习。
基本信息出版社: 四川大学出版社; 第1版 (2003年9月1日)平装: 378页语种:简体中文开本: 32ISBN: 7561426879条形码: 9787561426876商品尺寸: 20 x 13.8 x 1.6 cm商品重量: 399 g品牌: 四川大学出版社ASIN: B004XLDT8C《研究生系列教材:现代科学与工程计算基础》是我们在长期从事数值分析教学和研究工作的基础上,根据多年的教学经验和实际计算经验编写而成。
其目的是使大学生和研究生了解数值计算的重要性及其基本内容,熟悉基本算法并能在计算机上实现,掌握如何构造、评估、选取、甚至改进算法的数学理论依据,培养和提高读者独立解决数值计算问题的能力。
目录第一章绪论§1 研究对象§2 误差的来源及其基本概念2.1 误差的来源2.2 误差的基本概念2.3 和、差、积、商的误差§3 数值计算中几点注意事项习题第二章函数的插值与逼近§1 引言1.1 多项式插值1.2 最佳逼近1.3 曲线拟合§2 Lagrange插值2.1 线性插值与抛物插值2.2 n次Lagrange插值多项式2.3 插值余项§3 迭代插值§4 Newton插值4.1 Newton均差插值公式4.2 Newton差分插值公式§5 Hermite插值§6 分段多项式插值6.1 分段线性插值6.2 分段三次Hermite插值§7 样条插值7.1 三次样条插值函数的定义7.2 插值函数的构造7.3 三次样条插值的算法7.4 三次样条插值的收敛性§8 最小二乘曲线拟合8.1 问题的引入及最小二乘原理8.2 一般情形的最小二乘曲线拟合8.3 用关于点集的正交函数系作最小二乘拟合8.4 多变量的最小二乘拟合§9 连续函数的量佳平方逼近9.1 利用多项式作平方逼近9.2 利用正交函数组作平方逼近§10 富利叶变换及快速富利叶变换10.1 最佳平方三角逼近与离散富利叶变换10.2 快速富利叶变换习题第三章数值积分与数值微分§1 数值积分的基本概念1.1 数值求积的基本思想1.2 代数精度的概念1.3 插值型求积公式§2 等距节点求积公式2.1 Newton—CoteS公式2.2 复化求积法及其收敛性2.3 求积步长的自适应选取§3 Romberg 求积法3.1 Romberg求积公式3.2 Richardson外推加速技术§4 Gauss型求积公式4.1 Gauss型求积公式的一般理论4.2几种常见的Gauss型求积公式§5 奇异积分和振荡函数积分的计算5.1 奇异积分的计算5.2 振荡函数积分的计算§6 多重积分的计算6.1 基本思想6.2 复化求积公式6.3 Gauss型求积公式§7 数值微分7.1 Taylor级数展开法7.2 插值型求导公式习题第四章解线性代数方程组的直接法§1 Gauss消去法§2 主元素消去法2.1 全主元素消去法2.2 列主元素消去法§3 矩阵三角分解法3.1 Doolittle分解法(或LU分解)3.2 列主元素三角分解法3.3 平方根法3.4 三对角方程组的追赶法§4 向量范数、矩阵范数及条件数4.1 向量和矩阵的范数4.2 矩阵条件数及方程组性态习题第五章解线性代数方程组的迭代法§1 Jacobi迭代法§2 Gauss-Seidel迭代法§3 超松弛迭代法§4 共轭梯度法习题第六章非线性方程求根§1 逐步搜索法及二分法1.1 逐步搜索法1.2 二分法§2 迭代法2.1 迭代法的算法2.2 迭代法的基本理论2.3 局部收敛性及收敛阶§3 迭代收敛的加速3.1 松弛法3.2 Aitken方法§4 New-ton迭代法4.1 Newton迭代法及收敛性4.2 Newton迭代法的修正4.3 重根的处理§5 弦割法与抛物线法5.1 弦割法5.2 抛物线法§6 代数方程求根6.1 多项式方程求根的Newton法6.2 劈因子法§7 解非线性方程组的Newton迭代法习题……第七章矩阵特征值和特征向量的计算第八章常微方分程数值解法附录参考文献欢迎下载,资料仅供参考!!!资料仅供参考!!!资料仅供参考!!!。
第五章 线性方程组的解法PPT课件
1
整体 概述
一 请在这里输入您的主要叙述内容
二
请在这里输入您的主要 叙述内容
三 请在这里输入您的主要叙述内容
2
问题的提出:
在自然科学与工程技术中,很多 问题的解决常常归结为求解线性方程 组,如电学中的网络问题,机械和建 筑结构的设计和计算等,因此利用计 算机求解线性方程组就成为一个非常 重要的问题。
a(k) kj
ak(kj1)
/ak(kk1)
对于i=k+1,k+2,…,n,n+1计算
ai(kj)ai(kj1)ai(kk1)ak(k)j
其中j=k,k+1,k+2,…,n,n+1。 当k=n,即
27
继续这种过程,第n次消元后增广矩阵为
1
a(1) 12
(A(n) b(n))
1
a(1) 13
a(2) 23
会导致舍入误差的扩散,这是它的缺陷。
30
G-J消去法的一般求解过程如下:
消元过程:对于k=1,2,…,n,执行
设
a(k1) kk
0
,对于j=k,k+1,…,
n,n+1计算
a(k) kj
ak(kj1)
/ak(kk1)
对于i=k+1,k+2,…,n,计算
ai(kj)ai(kj1)ai(kk1)ak(k)j 其中j=k,k+1,k+2,…,n,n+1
0
0
a(2) n3
a(2) nn
an(2,n)1
19
如此继续计算下去,第k-1次消元结 束后就得到增广矩阵
a1(01)
线性代数方程组的直接解法
n
谱半径
列范数:
A
1
max
1 jn
i 1
aij
n
( A)
max
1 i n
i
❖行范数:
A
max
1 i n
j 1
aij
1
谱范数: A 2
1 ( AT A) 2
其中
是
1
A的T A最大特征值
20
证明:
谱范数: A 2
1 其中是1 A的T A最大特征值
1
A max Ax max[( Ax)T Ax]2
x
x c2
x
x Rn
则称 • 和 是• 上等R价n 的向量范数。
例如 x x n x
2
1
2
7
性质4 向量范数的等价性具有传递性。
性质5 Rn 的所有向量范数是彼此等价的。
性质6 (向量序列的范数极限)
设 x(k) Rn ,则 lim x(k) 的x充要条0 件是 k
lim
k
x(k) i
18
相容性:
AB max ABx max A(Bx)
x 1
x 1
max( A Bx ) A B x 1
矩阵范数的一般定义形式:
A max Ax , A Rnn
p
x p 1
p
19
Th3.5.4上述一般定义形式中分别取 p 1, 2,
从而得到常用的3种分别从属于它们的矩阵范数:
记 A (aij )nn
Ax0 A x0
则称 A是 从属于向量范数 的x矩 阵范数。 A 从属于向量范数 x的必要条件:
I 1
16
Th3.5.3 设 是 中Rn的一种向量范数,若定义 A max Ax , A Rnn
线性代数课件3-5齐次线性方程组的解法
下面证明 1 , 2 , , n r 是齐次线性方程组(1)的一 个基础解系.
(1)证明 1 , 2 ,, n 线性无关.
1 0 , 0 0 1 , , 0 0 0 1
n 由于
r
个n
r
维向量
线性无关, 所以n r 个n 维向量 1 , 2 , , n r 亦线性无关.
(2)证明 1 , 2 , , n 线性无关.
设 x 1 方程组的一个解
r
r 1
n 为上述
T
. 再作 1 , 2 , , n r 的线性组合
b11 b12 b b r1 r2 r 1 1 r 2 0 n 0 1 0 0 b1 ,n r c 1 b r ,n r c r 0 r 1 0 r2 1 n
~
1 0 0
0 1 0
2 7 5 7 0
3 7 4 7 , 0
便得
2 x1 x 3 7 5 x2 x3 7
3 7 4 7
x4, x4.
x3 1 0 2 7 3 7 令 及 ,对应有 x 1 及 , 0 1 x4 x2 5 7 4 7
解
对系数矩阵施 行初等行变换
1 2 A 1 3
1 1 1 1
1 3 3 5
4 5 2 6
线性代数方程组的直接法
目录摘要 (1)1 前言 (3)2 直接法简介 (4)2.1 Gauss消去法 (4)2.1.1 实例 (4)2.1.2 Gauss消去法的运算量 (5)2.1.3 Gauss消去法能够进行下去的条件 (6)2.2 列主元Gauss消去法 (7)2.2.1 实例 (7)2.2.2 列主元Gauss消去法的运算量 (8)2.3 全主元Gauss消去法 (8)2.3.1 实例 (9)2.3.2 全主元Gauss消去法的运算量 (9)2.4 平方根法 (9)2.4.1 实例 (10)2.4.2 平方根法的运算量 (11)2.5 改进的平方根法 (11)2.5.1 实例 (12)2.5.2 改进的平方根法的运算量 (12)2.6 追赶法 (12)2.6.1 实例 (13)2.6.2 追赶法的运算量 (14)3 直接法的误差分析 (15)3.1 线性方程组的敏感性和条件数 (15)3.2 误差分析 (17)4 数值算例 (19)4.1 算例1 (19)4.2 算例2 (19)4.3 算例3 (20)4.4 算例4 (21)5 总结 (22)参考文献 (23)致谢 (24)摘要本文采纳Matlab软件计算,介绍了解线性方程组常用的几种直接法:Gauss消去法、列主元Ga uss消去法、全主元Gauss消去法、平方根法、改进的平方根法、追逐法,及其的基本思想、解题实例和运算量;并对直接法进行了误差分析;最终通过数值算例比较前五种直接法的误差,商议其适用矩阵及其差异。
关键词:线性方程组,Gauss,平方根法,误差分析。
AbstractIn this paper, Matlab software is used to calculate and introduce several common direct methods for solving linear equations: Gauss elimination method, Column principal element Gauss elimination, Full Principal Component Gauss Elimination, Square root method, Improved square root method, Chasing method and their basic ideas, problem solving examples, and computational load.And error analysis of the direct method.Finally, the errors of the first five direct methods are compared by numerical examples, and the applicable matrix and its differences are discussed.Keywords: Linear equations, Gauss, Square root method, Error analysis.1 前言在自然科学和工程计算的领域中,很多问题往往可以归结为解线性代数方程组。
线性方程组的直接解法
| aii | | aij | 0 j 1 ji
(i 1,2,, n)
即对角线上每一元素的绝对值均大于同行其他各元素绝对 值之和,这样的矩阵称为按行严格对角占优矩阵,简称严格对角 占优矩阵.
例:
4 2 1
A3 8 2
1 1 5
性质:严格对角占优矩阵必定非奇异.
若A对 称 且 严 格 对 角 占 优, 则 消 元 过 程 中 第k步 主 元
9 上一页 下一页 返回
回代
求 解 三 角 形 方 程 组(2), 得 求 解 公 式
x
n
b( n1) n
a ( n1) nn
n
(bk(k 1)
a(k kj
1)
x
j
)
x
k
j k 1
a(k 1) kk
(k n 1, n 2,,1)
定理 若A的所有顺序主子式 /* determinant of leading principal
输入方程阶数n, 增广矩阵a(n, n 1), k 1, D 1
akk 0 F
i k 1,, n, aik aik / akk 输 出 失 败 信 息, 停 消
k=k+1
元
过
j k 1,, n, aij aij aik akj
程
D D •akk
ann 0 F
D D •a nn
思 首先将A化为上三角阵 /* upper-triangular matrix */, 路 再回代求解 /* backward substitution */。
=
一、 高斯顺序消去法 是一种古老的求解线性方程组的方法, 按自然顺序进
行消元的方法.
3 上一页 下一页 返回
线性代数 第5章方程组52PPT课件
100,
, 100.
分别代入上述方程组依次得:
x x x1 2 r b b b 12 r111, b b b 1 r2222, b b b1 2 r,,,n n n rrr.
从而求得原方程组的 n–r个解向量:
1
b
b b
11 21
r1
,
1
0
0
2
b
b b
12 224 30 0来自0031 ~ 0001
0 1 0 0
2 1
0 0
1 3 0 0
0021
得xx21
2x3 4x4 2x5 x3 3x4 x5
,令
x x
3 4
x5
1 0 0
,
0 1 0
,
0 0 1
.
所以原方程组的一个基础解系为:
1
1 1 0
2
,
2
0 1
A
~
10 00
0 1
0 0
b11 br1
0 0
b1,nr
br ,nr
0 0
则Ax = 0 x1 b11x r1 b1,n rxn. xr br1xr1br,nrxn
现对( xr+1, ···, xn )T 取下列 n–r 组数(向量):
xxxrrn12100,
1 3
,
3
2 1 0 0
.
0
0
1
故原方程组的通解为:
x = k11 + k22 + k33 , 其中k1, k2, k3 R.
例3: 设AmnBnl = Oml , 证明R(A)+R(B) n. 证明: 设B =(b1, b2, ···, bl ), 则
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 rr 1
x x
cond( A) b A A1 b
x
A1
r
A
r
cond( A)
b
b
结论得证
二、病态方程组求解时需要注意的问题
常用的几种判定方程组为病态的经验方法
当 det( A) 相对来说很小时,或者矩阵A 的某些
行(列)近似线性相关时,可能为病态;
矩阵在采用选主元消去法求解方程组时,在消
8
10
3.39E+10 3.54E+13
1.53E+10 1.60E+13
3.39E+10 3.54E+13
Th5.21 设A Rnn , b Rn , det( A) 0, b 0
x 是方程组 Ax b的精确解,x 是近似解,
r b Ax ,称之为剩余(或残余)向量
其中 A PAQ; x Q1x;b Pb
可逆矩阵P 和 Q的选择要求满足:
cond(PAQ) cond( A)
采用某些特殊的数值方法求解; 重新寻找出现病态的原因,改变原问题的提法。
方程组 Ax b为病态(/*ill-conditioned*/)方程组, 称系数矩阵 A为关于求解方程组或求逆的病态矩阵;
反之,如果 A 和 b 微小时, x 也微小,则称
方程组 Ax b为良态(/*Well-conditioned*/)方程组,
称系数矩阵 A为关于求解方程组或求逆的良态矩阵。
A 2 F
n
2
aj 2
n
Ua j
2 2
UA 2 F
j 1
j 1
A AT UT AT (AU )T AU
F
F
F
F
F
设 1和 n 是 A 按模最大和最小的特征值,则
cond( A) 1 n
AT A 取 2-范数等号成立
Th5.19设 A Rnn为可逆阵,x 和 x x分别满
A
由条件
1
A cond( A)
1
所以 A A可逆,且
A1
( A A)1
1 A1 A
如果 A1 且 A C , 1
则 C 可逆,且 C 1 (摄动定理) 1
方程组 ( A A)( x x) b b 有唯一解
A 1
A1 1
若矩阵范数取 -范数,则得到 -条件数
cond ( A)
A
A1
条件数的性质(Th5.20)
设 A Rnn , det( A) 0 cond( A) 1;cond( A) cond( A1);
cond( A) cond(A), R, 0 如果 A是正交矩阵,则 cond2 ( A) 1
3 0.0001
1 0
4 0.0002
精确解为 x
(2
10)T
上例说明该方程组的解对初始元素的扰动非常敏感。
设方程组为 Ax b
系数矩阵A 和常数向量 b 的扰动分别记为: A和 b
实际求解的方程组为 ( A A)x (b b)
Def 1 如果 A 和 b 很小,而 x 很大,则称
结论得证
例如: Hilbert矩阵就是一个著名的病态矩阵
1
1 2
1 3
11
1
Hn 2
3
4
11
1
n (n 1) (n 2)
1
n
1 (n 1)
对 称 正
定
矩
1
阵
(2n 1)
n
cond1(H ) cond2(H ) cond (H )
4 28375 15514 28375
6 2.9E+7 1. 5E+7 2.9E+7
正交矩阵:AT A AAT I
如果 U 为正交矩阵,则 cond2 ( A) cond2( AU ) cond2(UA)
Lemma
设 A Rnn
,在正交变换下,谱范数
A 2
和F-范数 A 保持不变,即设U Rnn ,U TU I F
则有:
A AU UA
2
2
2
x x ( A A)1(b b) x ( A A)1[(b b) ( A A)x]
( A A)1[ b ( A)x] x ( A A)1[ b ( A)x]
( A A)1 ( b A x )
证明:
A AU UA
F
F
F
(1) AU A U A
2
2
2
2
A AUUT AU UT AU
2
2
2
2
2
同理可证 A UA
2
2
(2) 对 x Rn
Ux 2 (Ux)T (Ux) xTUTUx x 2
2
2
设 A [a1, a2 , , an ] UA [Ua1,Ua2 , ,Uan ]
病态方程组对任何算法都将产生数值不稳定性
Def 2设 A Rnn为可逆阵, 为一种从属矩阵范
数,则称 cond( A) A A1 为矩阵A的条件数
若矩阵范数取2-范数,则得到谱条件数:
cond2( A)
A 2
A1 2
若矩阵范数取1-范数,则得到1-条件数:
cond1( A)
如果 A 0; b 0 ,则
x
b
cond( A)
x
b
如果 A 0; b 0 ,则
x cond( A) A (1 O( A ))
x
A
仅由 A或者 b引起的解的相对误差限可大致认为是
原始扰动的相对误差的倍数,倍数近似等于条件数。
如果 A 0; b 0 ,则
§5 直接法的误差分析/*Error Analysis of Direct Method */
一、扰动方程组的误差界/*Error Bound of Perturbed Systems */
由实际问题得到的方程组的系数矩阵或者常数 向量的元素,本身会存在一定的误差;这些初始数 据的误差在计算过程中就会向前传播,从而影响到 方程组的解。
元过程中出现很小的主元,可能为病态;
解方程组得到了一个很大的解,或者特征值相差大
数量级,可能为病态;
当系数矩阵的元素间数量级相差很大,且无一定
规则时,可能为病态。
求解病态方程组时,常用的几种处理原则 采用高精度的算术运算; 采用预处理方法;
Ax b PAQQ1x Pb Ax b
A1
( b A x )
1 A1 A
A1
x
( b A x )
1 A1 A
b
A
b A x ( A x
A x)
b
A
x cond( A) b A
( )
x 1 A1 A b
A
Corollary(推论) 在上述定理的条件下,
初始数据误差和方程组的近似解的误差之间关系
例12 考察方程组: 3 3.0001
1 1
x1 x2
4 4.0001
精确解为 x (1 1)T
设方程组存在扰动 3 2.9999
1 1
x1 x2
4 4.0002
足方程组 Ax b和 ( A A)( x x) b b
其中 b 0 ,且 A 适当小,使得
A
1
A cond( A)
则 x cond( A) A b
( )
x 1 A1 A A
b
其中所用的是任意向量范数和从属于它的矩阵范数
证明:设 A1 , A A ( A A)
x
A
cond( A)
x x
A
实际的相对误差 与条件数的关系
证明:( A A)( x x) b A x A(x x) 0 x A1 A(x x)
x A1 A x x
A
cond( A)
x x
A
则有 1 r xΒιβλιοθήκη xr cond( A)
cond( A) b x
b
定理给出了相对误差的估计范围(与条件数有关)
证明: Ax b x A1b
b A x x A1 b
r b Ax A( x x) x x A1r
r A xx
x x A1 r