波特率修改步骤
道道通如何修改端口波特率

道道通如何修改端口波特率
时间:2012-7-9 19:24:59 评论:8
【新手教程】:道道通怎么修改端口和波特率
【新手疑问】:道道通如何修改端口波特率
【如何解决】:修改config.txt
【特别感谢】:oogps,dtsj
【是否测试】:已测试
教程说明:在前面我们在《道道通配置文件config.txt详解》一文中已经提到了config.txt各参数的设置,可能大家还没理解我的意思,最近有不少刚入手GPS的同学又开始问了。
教程开始:
1、首先我们必须知道自己导航仪的端口速度,可用本站的检测端口波特率软件。
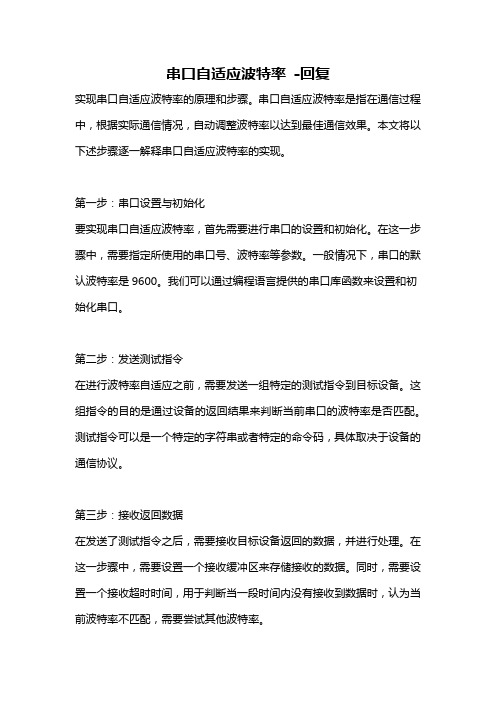
2、在道道通找到“Config.txt”这个文件,双击打开该文件,第7行的
“,AutoSearch=1”为设置是否自动适应端口波特率(0为手动设置,1为自动设置),见图1;
3、第8行的“,Port=2”为修改端口的代码(=号后边改为检测出来的端口),见图2;
4、第9行的“,BaudRate=9600”为修改波特率的代码(=号后边改为检测出来的端口),见图3。
linux 串口 非标准波特率

在Linux中,串口通信通常使用termios结构体来配置串口参数,包括波特率等。
要设置非标准的波特率,可以使用以下方法:1. 首先,需要包含头文件`<termios.h>`和`<unistd.h>`。
2. 然后,使用`tcgetattr()`函数获取当前串口属性。
3. 修改`cfsetispeed()`和`cfsetospeed()`函数的参数,分别设置输入和输出波特率。
4. 使用`tcsetattr()`函数更新串口属性。
5. 最后,关闭串口设备。
以下是一个示例代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>#include <fcntl.h>#include <termios.h>int main() {int fd;struct termios options;// 打开串口设备fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY);if (fd == -1) {perror("open_port: Unable to open /dev/ttyS0 - ");return(-1);}// 获取当前串口属性tcgetattr(fd, &options);// 设置非标准波特率(例如:9600)cfsetispeed(&options, B9600);cfsetospeed(&options, B9600);// 更新串口属性tcsetattr(fd, TCSANOW, &options);// 关闭串口设备close(fd);return 0;}```注意:请根据实际情况修改串口设备名称(如`/dev/ttyS0`)和波特率(如`B9600`)。
通过驱动修改串口波特率的方法

通过驱动修改串口波特率的方法
要通过驱动修改串口波特率,可以按照以下步骤进行操作:
1. 打开设备管理器。
在Windows系统中,可以按下Win + X 键,然后选择设备管理器来打开设备管理器窗口。
2. 在设备管理器中找到并展开"端口(COM和LPT)"或者"通信
端口"分类。
3. 找到需要修改波特率的串口设备,并右击选择"属性"。
4. 在属性窗口的"端口设置"选项卡中,找到波特率设置选项。
一般来说,这个选项在"位/秒"或者"波特率"下面。
5. 修改波特率。
通过下拉菜单选择所需的波特率。
6. 确认并应用修改。
点击"确定"或者"应用"按钮,使修改生效。
注意:以上操作步骤适用于大部分的串口设备,但是有些特殊设备的驱动程序可能会有所不同。
如果以上方法不适用于你的设备,请参考设备的说明书或者联系设备制造商获取更详细的操作指南。
串口自适应波特率 -回复
串口自适应波特率-回复实现串口自适应波特率的原理和步骤。
串口自适应波特率是指在通信过程中,根据实际通信情况,自动调整波特率以达到最佳通信效果。
本文将以下述步骤逐一解释串口自适应波特率的实现。
第一步:串口设置与初始化要实现串口自适应波特率,首先需要进行串口的设置和初始化。
在这一步骤中,需要指定所使用的串口号、波特率等参数。
一般情况下,串口的默认波特率是9600。
我们可以通过编程语言提供的串口库函数来设置和初始化串口。
第二步:发送测试指令在进行波特率自适应之前,需要发送一组特定的测试指令到目标设备。
这组指令的目的是通过设备的返回结果来判断当前串口的波特率是否匹配。
测试指令可以是一个特定的字符串或者特定的命令码,具体取决于设备的通信协议。
第三步:接收返回数据在发送了测试指令之后,需要接收目标设备返回的数据,并进行处理。
在这一步骤中,需要设置一个接收缓冲区来存储接收的数据。
同时,需要设置一个接收超时时间,用于判断当一段时间内没有接收到数据时,认为当前波特率不匹配,需要尝试其他波特率。
第四步:波特率调整当接收到返回数据时,需要判断该数据是否符合预期。
如果符合预期,则认为当前波特率设定正确,通信正常。
如果返回的数据不符合预期,则需要调整波特率。
波特率的调整可以通过修改串口参数实现。
第五步:循环调整波特率在进行了波特率的调整后,重新回到第二步,发送测试指令,并在一定时间内接收返回数据。
通过不断的循环调整波特率,直到找到符合预期的波特率。
第六步:通信稳定性测试当串口的波特率调整完成后,需要进行通信稳定性测试,确保通信的稳定性。
可以通过发送一组测试数据到目标设备,并接收返回结果,验证通信是否正常。
如果测试结果异常,可能还需要进一步调整波特率或其他通信参数。
总结:串口自适应波特率是通过不断尝试不同的波特率,通过匹配返回数据来确定最佳通信波特率的过程。
通过上述的步骤,我们可以实现串口自适应波特率。
这种方法可以很好地解决因通信波特率不匹配导致的通信异常问题,提高通信的稳定性和可靠性。
波特率自适应

波特率自适应方案一、波特率自适应概念电表检测PC 机通信的波特率,并自动匹配通信。
二、方案1、 点对点自适应通信,即PC 机与单一电表进行自适应通信。
如果我们想利用PC 机(波特率为1200bps )对未知波特率的电表通信,则需要进行下面几个步骤。
1.1 第一步:PC 机需要以1200bps 发送“ 55H 55H ”1.2 第二步:等待未知波特率的电表应答。
如果自适应成功则应答字符为:“80H ”,这时未知波特率的电表将更波特率为1200bps 。
如果无应答,应答字符有误,或者在500ms 内未应答则此次自适应过程失败。
重复第一步和第二步,重复三次都未应答则自适应失败。
1.3 第三步:成功自适应则可以利用1200bps 对电表进行通信。
自适应失败只能将电表的波特率修改成1200bps 才能通信。
如果想用其他的波特率通信,请重复上面步骤流程图PC (1200)发送5555H → 电表回复80H → 1200正常通讯 →若要修改波特率 ↑ ↓← 电表未回复80H2、 点对多自适应通信,即广播方式让总线上的电表统一波特率流程图3、 电表单片机自适应波特率原理在不同波特率下发送一位数据的时间是不一样的,利用这个原理,确认在1200、2400、4800、9600状态下发送一个字节所需要的时间段B1、B2、B3、B4,将其存储到单片机中。
PC 机以广播方式1200bps 发送5555H 等待500ms 再次广播发送55H 等待500m PC 机以1200bps 抄读系统表当PC机发送数据到电表时,单片机利用定时器测量接收一个字节的时间A,然后将A与B1,B2,B3,B4进行比对,假如A在B1范围内,那么单片机将电表波特率设置为1200,修改波特率结束。
流程图如下所示:广播或者PC发送5555H(1200波特率)单片机接收到第一个字节数据55H,产生接收中断1定时器开始工作,每产生一次定时器中断就对变量A进行累加单片机接收到第二个字节数据55H,产生接收中断2关闭定时器,将变量A与B1/B2/B3/B4进行比对,确认A属于范围B1单片机将电表波特率改为1200波特率修改成功。
U-blox公司产品波特率修改及与单片机接口参数应用

-blox公司产品波特率修改及与单片机接口参数应用:瑞士u-blox公司提供的专业测试软件u-center,不但是专业级别的测试软件,而且可以对u-blox公司的模块进行相应的模块功能设置,功能强大,我们将为你介绍部分常用的相关与模块接口的使用功能.以下介绍的是通过u-blox公司的UBX协议来配合u-center软件来对u-blox公司的GPS模块进行模块的设置参数更改,UBX格式是u-blox公司独家开发且应用于所有自产的模块中的可支持的通信协议,UBX格式具体说明资料可以在本站内进行下载.以下主要内容包括:利用u-center软件来修改GPS模块的波特率通过单片机来进行模块的操作休眠模块的设定及唤醒u-blox 模块4Hz刷新频率更改(TIM-LR/4R除外)u-blox 模块NMEA精简字符信息输出u-blox 模块冷启动时间TTFF测试刷新友情提示:对于以下内容中提及的所有问题,若使用为特殊的高规格场合,且不考虑成本问题,我们建议客户选用LEA-4H/5H模块利用u-center软件来修改GPS模块的波特率:第一步: 以飞扬科技的TIIM-4H评估测试主板套件为例,连接好相关硬件并打开u-center软件并设置好COM口及9600的初始波特率出现如下界面:第二步: 在顶部栏目状态栏中选中模块配置修改框如下图所示:第三步: 将出现下图所示的栏目框,是u-blox针对于模块进行的配置参数选项,选择UBX>>CFG(config)>>PRT(ports),默认的波特率是9600,如上图所示你可以根据需要修改相应的波特率在下拉菜单中进行选择,例如我们计划选用通信波特率为57600,请在Baudrate中选择57600,并请按底部的SEND按钮对模块进行命令发送:第四步: 选择完新的波特率之后,我们再在主栏目中选择当前选择新的波特率57600进行实时通信,如下图所示:第五步: 我们现在已经使用了新设置的57600的波特率进行通信,但如果要掉电保存在模块的FLASH当中还需要对当前的信息进行操作,下次模块断电启动后便可从模块的FLASH(或E2PROM)当中读取新设置的波特率了,请选择栏目框当中的: UBX>>CFG(config)>>CFG(configuration)选项中,墨认为: save current configuration 选项,这是进行保存设置的选项然后我们再次在底部的状态栏再次选择SEND对模块进行保存指令的发送好棒,我们的波特率设置就完成了,现在再重新启动u-center软件,你会发现现在通信已经是新设置的波特率了.关于以上波特率适合于u-blox模块系列的修改事宜:不过,我们的设置是钟对于飞扬科技的TIM-4H板为例,因为u-blox的模块的存储器分为几种:ROM版本,例如LEA-4S/4A,TIM-4S/4A系列E2PROM版本,如新出的LEA-4S-1,TIM-4S-18M Flash的版本,如LEA-4H/4P/LH/LP,TIM-4H/4P/LH/LPE2PROM版本及FLASH版本是可以通过u-center软件来完成配置及修改,但ROM版的如LEA-4S/4A及TIM4S/4A系列,内部是没有FLASH的,而这几个版本在中国为大多数客户选用,而且将涉及到调整波特率的问题,那么改变参数的方法如下:第一种方式需要通过外围的引脚定义接线来硬件配置波特率及启动参数等相对较常用的配置,这些内容可以参考u-blox的原厂的模块PDF文档第二种方式是每次在机器一开始运行时,便选用单片机来对模块进行控制,给模块的串口通信端发送相应的代码来控制不同的波特率,关于用单片机来控制当前模块的通信波特率,请参考以下章节:通过单片机来进行模块的操作现在客户更关心的问题是怎么样利用单片机或其它系统来对模块进行操作,最常见的就是对模块进行冷启动什么情况下进行冷启动呢?一是客户客观的需要,二是有时比如在信号特别差的地方,很久都没有办法收到GPS信号,有时转换地点也不行,这时候选用冷启动运行新的搜星定位反而会令到启动速度更快,在这种情况之下有些客户便选择冷启动让模块重新查找星系定位,设置方法如下:第一部: 在状态栏当中选择: UBX>>CFG(config)>>Startup option以在Startup option中,将会有热启动,温启动,冷启动三个选项,分别对应三种不同的启动方式,我们选择三种模式就会发现在蓝色框当中的16进制代码会发生相应的变化,注意蓝色框当中的红色框,那段代码是对模块启动控制三种方式的16进制代码,这些代码将是我们利用单片机对模块进行控制所需要用到的内容第二步:我们选中红色栏目当的内容,将红色框内的16进制代码通过单片机对模块的UART通信端口进行发送,发送三种不同的代码就可以通过单片机来控制GPS模块的热启动,温启动,冷启动三个状态了.好了,到这里大家对使用获取的代码来控制u-blox公司的GPS模块有一定的概念了,我们再回过来讲比较复杂的开机冷启动时配置ROM版本的LEA-4A/4S及TIM-4A/4S的波特率问题:关于用单片机控制ROM版本的LEA-4A/4S及TIM-4A/4S模块波特率的实例:第一步: 在状态栏当中选择: UBX>>CFG(config)>>PRT(ports),在Baudrate中选择不同的参数就会有不同的波特率,注意蓝色方框的代码变化第二步: 选择需要的波特率,提取蓝色方框中的红色框内的16进制代码,用单片机对模块的UART端口进行数据发送,上面谈到是在机器冷启动的时候便开始发送,模块便开始在当前的波特率下进行通讯工作.另外,若是以蓝牙等形式没有单片机等相连的直接发送模块的方式,也需要使用波特率设置,可以用上页中提到的用硬件外接跳线的方式设置波特率.休眠模块的设定及唤醒接下来我们再补充一下大家关心的休眠模式的设定:我们找到UBX--->CONFIG--->FXN(Fix Now Mode)1. 在如下设置窗口,设置参数,具体各个参数的作用,请参看我们的系统集成手册62~65示意图解释。
各大导航地图端口波特率修改文件 (1)
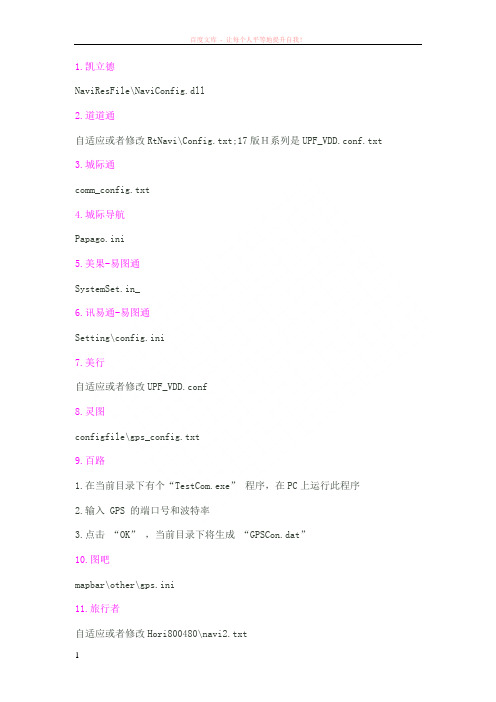
NaviResFile\NaviConfig.dll2.道道通自适应或者修改RtNavi\Config.txt;17版H系列是UPF_VDD.conf.txt 3.城际通comm_config.txt4.城际导航Papago.ini5.美果-易图通SystemSet.in_6.讯易通-易图通Setting\config.ini7.美行自适应或者修改UPF_VDD.conf8.灵图configfile\gps_config.txt9.百路1.在当前目录下有个“TestCom.exe” 程序,在PC上运行此程序2.输入 GPS 的端口号和波特率3.点击“OK” ,当前目录下将生成“GPSCon.dat”10.图吧mapbar\other\gps.ini11.旅行者自适应或者修改Hori800480\navi2.txt自适应或者修改Guider4u.txt 有的是Guider.txt13.Garmin自适应14.任我游GoU\Default.ini15.路仙gps_port.txt16.趴趴走Papago.ini17.IGOigoQ2\sys.txt18.R66自适应19.万利达-高德普清sp.txt高清Plugin.dll20.好帮手-高德Navigation\Plugin.dll21.铁将军-高德 (5.1版) DATA\AutoNavi.ini22.新科高德Shinco\Navi\gps.ini23.MIOMAPMioMap.INI24.MapKing工具-GPS轨迹-设定-自动搜索或者手动设定端口25.快导userdata\Config.bin。
如何修改凯立德端口号和波特率

如何修改凯立德端口号和波特率很多朋友发帖说,自己下载安装凯立德软件或将原有的凯立德软件升级更新后,导航时搜索不到卫星了。
这一问题一般是凯立德软件与导航仪的端口号和波特率不一致所致,此时,我们只需将端口号和波特率重新更改正确就行了第一种方法:本部分设定了隐藏,您已回复过了,以下是隐藏的内容新打开一个记事本,自己将正确的端口号和波特率写入,例如:com port=1:冒号一定要保留baundrate=4800保存时将文件名改为NaviConfig.TXT即可。
第二种方法:下载一个UltraEdit工具软件,用它打开NaviOne.dll文件,点搜索查找,从31 3A 00 00,32 3A 00 00……一直到39 3A 00 00,查找到时,工具会显示出的,第一个双字符31就是com1,32就是com2……,余类推,直接修改为正确即可。
假如待查的NaviOne.dll的端口号是com5,我们逐一输入上述数据,如果与之不符的话,工具软件会提示未查到输入的数据,直到输入35 3A 00 00时,工具上才会显示出35 3A 00 00这一行数据,后排还会有一个提示com5。
此时可直接将其修改为你所需要的数据即可。
波特率的查找和修改与上述方法一样。
波特率查找下面的字符:4800: 4B 0D A0 039600: 96 0D A0 0319200: 4B 0C A0 0338400: 96 0C A0 0357600: E1 0C A0 03查找到时,工具也会显示出的,直接修改为正确即可。
第三种方法:该方法仅适用C系列800×480高清版本的。
首先,下载一个凯立德C系列800×480版本的的端口修改工具,我已上传到RayFile了,下面是地址:本部分设定了隐藏,您已回复过了,以下是隐藏的内容/files/a4f880a3-50d9-11df-a5ca-0015c55db73d/将压缩包解压后,得到一个凯立德图标,该图标即为凯立德端口修改工具。