工程力学 第三章 一般力系的简化
《工程力学》第三章 平面一般力系
• 故主矢R′的模为
• 主矢R′的方向从图3-3(b)中可知
图3-3
• 2.对点O的主矩 • 从图3-3(b)中可知,MO应是该平面一般力偶
系m1,m2,…,mn的合力偶矩。由平面力偶 系的合成定理可知,
• 由于Fd也等于力F对B点的矩,mB(F)=Fd,于 是得
• §3-2 平面一般力系向一点的简化 • 一、平面一般力系向一点的简化 • 在力系的作用平面内,被任选的一点O称为简
化中心。将力系中诸力平移至简化中心,同时 附加一个力偶系的过程,称为力系向给定点的 简化。
图3-2
•经 简 化 后 的 平 面 共 点 力 系 合成为一个合力R′,该合力作用点在简化 中心上;把简化后的附加力偶系m1, m2,…,mn合成得一力偶MO(图32(c))。自然,依据力的平移定理,可将 力R′和MO合成为一个力R(图3-2(d)), 这个力R就是原力系F1,F2,…,Fn的合 力。
• 二、截面法求桁架内力
• 截面法一般采用如下步骤:
• (1)先求出桁架支承约束反力。
• (2)如需求某杆的内力,可通过该杆作一 假想截面,将桁架截为两段(只截杆件, 不能截在节点上)。注意被截杆件一般不 能多于三根。任选半边桁架考虑平衡,在 杆件被截处,画出杆件内力,其指向假定 沿杆件而背离杆件被截处。
图3-5
• 二、平面一般力系向一点简化结果分析
• 1.平面一般力系向一点的简化结果
• 平面一般力系向简化中心简化,其结果可能出现 四种情况:
• (1)R′=0,MO=0
• 主矢和主矩均等于零。它表明简化后的平面汇交 力
工程力学-平面任意力系

R' ( X )2 (Y )2 0
LO mO (Fi ) 0
①一般式 (一矩式)
X 0
平面力系中各力在直角坐标系oxy中
Y 0
各坐标轴上投影的代数和及对任意
点的力矩的代数和均为0。
mO (Fi ) 0
②二矩式
∑X=0 或∑Y=0
mA(Fi ) 0
mB (Fi ) 0
AB O
工程中的桁架结构
桁架的优点:轻,充分发挥材料性能。
桁架的特点:①直杆,不计自重,均为二力杆;②杆端铰接;
力
学 中 的 桁 架 模
基 本 三 角 形
型
③外力作用在节点上。
力
学
中 的 桁 架
简 化 计 算 模
模型
型
力
学
中 的 桁 架
简 化 计 算 模
节点
杆件
模型
型
一、节点法 [例3-3] 已知:如图 P=10kN,求各杆内力?
第三章 平面任意力系
平面任意力系(General coplanar force systems):各力的作用 线在同一平面内,既不汇交为一点又不相互平行的力系叫∼。
[例]
研究方法:把未知力系(平面任意力系)变成已知 力系(平面汇交力系和平面力偶系)
第三章 平面一般力系
§3–1 力向一点平移 §3–2 平面力系的简化 §3–3 平面力系的平衡条件 §3–4 刚体系统的平衡问题 §3–5 考虑有摩擦时物体的平衡问题
§3-2 平面力系的简化
一、平面力系向作用面内一点简化
O: 简化中心
主矢(Principal vector) R Fi
大小: R' R'x2 R'y2 ( X )2 (Y )2
《工程力学:第三章-力系的平衡条件和平衡方程》解析
工程力学 1. 选择研究对象。以吊车大梁 AB为研究对象,进行受力分析 (如图所示) 2.建立平衡方程
第三章 力系的平衡条件和平衡方程
FAX FTB cos 0 Fy 0
F
x
0
: (1)
M
FAy FQ FP FTB sin 0
A
(F ) 0
工程力学
第三章 力系的平衡条件和平衡方程
§3.3 考虑摩擦时的平衡问题
3.3.1 滑动摩擦定律
概念:
静摩擦力:F 最大静摩擦力:Fmax 滑动摩擦力: Fd
静摩擦因数:
水平拉力: Fp
Fmax f s FN
fs
工程力学
第三章 力系的平衡条件和平衡方程
3.3.2 考虑摩擦时构件的平衡问题
考虑摩擦力时与不考虑摩擦力时的平衡 解题方法和过程基本相同, 但是要注意摩擦力的方向与运动趋势方向相反;且在滑动之前摩擦 力不是一个定值,而是在一定范围内取值。
l l sin 0
(3)
工程力学
第三章 力系的平衡条件和平衡方程
• 联立方程(1)(2)(3)得:
FAX
FQ FP 3 l x 2
(2)由FTB结果可以看出,当x=L时,即当电动机移动到大梁右 端B点时,钢索所受的拉力最大,最大值为
非静定问题:未知数的数目多于等于独立的平衡方程的数目,不能 解出所有未知量。相应的结构为非静定结构或超静定结构。
会判断静定问题和非静定问题
工程力学
第三章 力系的平衡条件和平衡方程
工程力学
第三章 力系的平衡条件和平衡方程
3.2.2 刚体系统平衡问题的特点与解法
1.整体平衡与局部平衡的概念 系统如果整体是平衡的,则组成系统的每一个局部以及每一个 2.研究对象有多种选择 刚体也必然是平衡的。
工程力学基础第3章 力系的静力等效和简化
二、力系简化的最终结果 根据力系主矢和主矩的性质,力系可最终简化为下列四种情形 1 2 3 4 平衡力系 即与零力系等效。其条件为主矢F′R=0,主矩M 该力偶称为力系的合力偶。力系存在合力 该力称为力系的合力。
O=0 单一等效力偶 单一等效力 力螺旋 偶的条件为主矢F′R≠0,主矩MO≠0。 在最一般的情况下,力系的主矢和主矩不垂直
三、平面力系的简化结果
(1)沿直线路面行驶的汽车,若不考虑由于路面不平引起的
左右摇摆和侧滑,则由汽车所受的重力、空气阻力及地面对车 轮的约束力构成的空间力系将对称于汽车的纵向对称面。将该 力系向汽车的纵向对称面简化,就可得到一个平面一般力系, 如图3-11 (2)工厂车间里的桥式起重机,梁的自重、起重机小车的自 重和起吊物的重量均作用在梁的纵向对称面内。梁两端四个车 轮的约束力也对称于该平面,故该力系可简化为梁纵向对称面 内的一个平面力系,如图3-12所示。
图3-3
力的平移定理
可以把作用于刚体上点A的力F平行移动到任一
点O,同时附加一个力偶,其力偶矩矢M等于力F对点O的力矩
矢,即M=MO(F),则平移后得到的新力系与原力系等效, 如图3-4 力的平移定理可以直接用等效力系定理来证明。反之,作用于 同一刚体的同一平面内的一个力和一个力偶(即力偶矩矢和力 矢垂直时),可以用一个力等效代替。
(一般)力系,这是力系的最一般的形式。当力系中各力的作 用线位于同一平面内时,称为平面(一般)力系,这是工程实 际中常见的重要情形。有些空间力系通过等效转换的方法也可 以变为平面力系。如果力系中各力的作用线交于一点,则称为 汇交力系。如果力系全部由力偶组成,则称为力偶系。汇交力 系和力偶系也有空间和平面两种情形,汇交力系和力偶系是两
图3-4
平面一般力系的简化
F1
m1
x
F2
(a)
(b)
1.简化方法
向一点简化
一般力系(任意力系)
(未知力系)
FR(已知力系)
汇交力系合力
4
附加力偶的合力偶矩
2.主矢与主矩
①. 主矢:指原平面一般力系各力的矢量和
。
主矢 的 解析求法
大小: 方向: 注意:因以主它矢与等简于化原中力心系的各位力置的无矢关量。和,所
4、固定端(插入端)约束 在工程中常见的有:
A 雨搭
车刀
固定端(插入端)约束的构造
Fi A
约束反力
①认为Fi这群力在同一 平面内;
7
MA
FA
A
MA A
FA y FA x
② 将Fi向A点简化得一 力和一力偶;
③FA方向不定可用正交 分力FAx, FAy表示;
④ FAx, FAy ,MA为固定端 约束反力; ⑤ FAx, FAy限制物体平动, MA为限制转动。
A (a)
B F
F A (b)
m B A
(c)
2
讨论
①力线平移定理揭示了力与力偶的关系:力 力+力偶
②力线平移定理可考察力对物体的作用效应。
P
e
O
A
P
m
O
A
(刚体、变形体两 种情况)
③力线平移定理是力系简化的理论基础。 3
二、 平面一般力系向一点简化
Fn
An O
A2
F1
A1 F2
y Fn mn
5
②主矩:指原平面一般力系对简化中心之矩的代数和 。
大小:
主矩 MO 正、负规定 : 转向 +
工程力学第三章-力系的平衡

将上式两边向x、y、z 轴投影,可得平衡方程
F F F
可以求解3个未知量。
x y
z
0 0 0
• 2.平面汇交力系
力系的平衡
• 力偶系的平衡方程 • 1.空间力偶系
平衡的充要条件(几何条件) M Mi 0 将上式两边向x、y、z 轴投影,可得平衡方程
M M M
可以求解3个未知量。
ix iy iz
0 0 0
• 2.平面力偶系
力系的平衡
• 平衡的充要条件:力偶系中各力偶矩的代数和等于零.
m 0
i
• 任意力系的平衡方程 空间任意力系: • 平衡的充要条件:力系的主矢和对任一点的主矩均为零。
FR 0
MO 0
G3 a
e
G 3(a b) FNAb G1e G 2L 0 G 3(a b) G1e G 2L FNA 2 b
由(1)、(2)式 得:
G1 G2 L
G1e G 2L G3 ab
3
A FN A b
B FN B
(2)空载时
不翻倒条件:FNB≥0 (4) 由 mA 0 得:
FAB = 45 kN
600
y B TBC 15 15 30 TBD
0 0 0
x
C
D
150
B
300
TBD=G E
A
E
FAB G
解题技巧及说明:
1、一般地,对于只受三个力作用的物体,且角度特殊时用 几 何法(解力三角形)比较简便。 2、一般对于受多个力作用的物体,且角度不特殊或特殊, 都用解析法。 3、投影轴常选择与未知力垂直,最好使每个方程中只有一 个未知数。
工程力学--平面一般力系解读
作用在简化中心。是各力的矢量和,所以与简化中心位置无关。
主矩 MO m1 m2 m3
mi
mO (F1) mO (F2 ) mO (Fi )
是各力对简化中心的力矩之和,所以与简化中心位置有关。
例题 1 已知平面任意力系如图,F1 100 2N , F2 100N , F3 50N
由于主矢和主矩都不为零,所以最后合成结果是一个合力FR。如图所
示。 合力FR到O点的距离
d
MO FR
0.51
m
例题 3 水平梁AB受三角形分布的载荷作用,如图所示。载荷的最大集
度为q, 梁长l。试求合力作用线的位置。
F
q A
解:在梁上距A端为x的微段dx上,作 q 用力的大小为q’dx,其中q’ 为该处的载 B x 荷集度 ,由相似三角形关系可知
列平衡方程得:
X XA 0 Y YA NB P 0
mA (Fi ) P 2a NB 3a 0
解得: YXAAP30
N
B
2P 3
例题 5 如图所示,支架的横梁AB与斜杆DC彼此以铰链C连接,并各以铰链
A,D连接于铅直墙上。已知AC=CB,杆DC与水平线成45o角;载荷F=10 kN,
(2)当Q=180kN,满载W=200kN时,由平面平行力系的平衡方程可得:
Fi Q P W NA NB 0 mA (F ) Q(6 2) P 2 W (12 2) NB 4 0
解得:
N N
A B
210 870
kN kN
•§3-6 静定与静不定问题的概念
一、静定与静不定问题的概念
作用于B处。设梁和杆的重量忽略不计,求铰链A的约束力和杆DC所受的力。
AA
gxt3第三章工程力学课后题答案
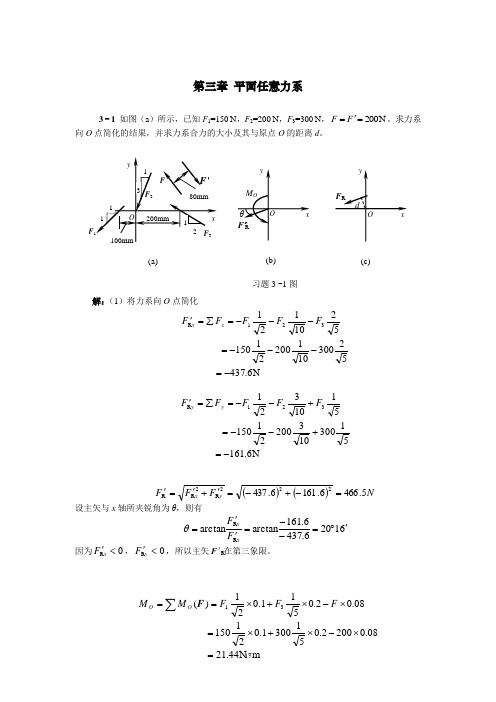
第三章 平面任意力系3-1 如图(a )所示,已知F 1=150N ,F 2=200N ,F 3=300N ,N 200='=F F 。
求力系向O 点简化的结果,并求力系合力的大小及其与原点O 的距离d 。
解:(1)将力系向O 点简化N6.43752300101200211505210121321R-=---=---=∑='F F F F F x xN6.16151300103200211505110321321R-=+--=+--=∑='F F F F F y y()()N F F F y x 5.4666.1616.437222R 2R R=-+-='+'='设主矢与x 轴所夹锐角为θ,则有61206.4376.161arctanarctanRR '︒=--=''=x y F F θ因为0R <'x F ,0R <'y F ,所以主矢F 'R在第三象限。
08.02002.0513001.02115008.02.0511.021)(31⨯-⨯+⨯=⨯-⨯+⨯==∑F F F M M O O F(a)(b) (c)将力系向O 点简化的结果如图(b )。
(2)因为主矢和主矩都不为零,所以此力系可以简化为一个合力如图(c ),合力的大小mm 96.4504596.05.46644.21N 5.466RR R ====='=m F M d F F o3-2重力坝的横截面形状如图(a )所示。
为了计算的方便,取坝的长度(垂直于图面)l =1m 。
已知混凝土的密度为2.4×103 kg/m 3,水的密度为1×103 kg/m 3,试求坝体的重力W 1,W 2和水压力P 的合力F R ,并计算F R 的作用线与x 轴交点的坐标x 。
解:(1)求坝体的重力W 1,W 2和水压力P 的大小kNN dy y dy y q P mN y dyy dy y q 5.9922105.9922245108.9)45(108.9)()45(108.9)45(8.91011)(3234534533=⨯=⨯⨯=⋅-⨯=⋅=-⨯=-⨯⨯⨯⨯⨯=⎰⎰(2)将坝体的重力W 1,W 2和水压力P 向O 点简化,则kN 5.9922R==∑='P F F x xkN 3057621168940821R-=--=--=∑='W W F F y y()kN 7.32145305765.9922222R 2R R=-+='+'='y x F F FkN N W kN N W 2116810211688.9104.2136)545(2194081094088.9104.218)545(332331=⨯=⨯⨯⨯⨯⨯+==⨯=⨯⨯⨯⨯⨯+=(a) (b) (c)设主矢与x 轴所夹锐角为θ,则有︒=-=''= 02.725.992230576arctanarctanRR x y F F θ因为0R >'x F ,0R <'y F ,所以主矢F 'R在第四象限,如图(b )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)、求合力作用线方程
' ' M o M o FR x FRy y FRx x FRy y FRx
即 2355 x 670.1 y 232.9 有: 670.1x 232.9 y 2355 0 求 FR 与x轴的交点 y 0
x 3.514m
§3–4
力对点的矩和力对轴的矩
1、 力对点的矩以矢量表示 ——力矩矢 三要素:
(1)大小:力F与力臂的乘积 (2)方向:转动方向 (3)作用面:力矩作用面。
(3–4)
又 则
(3–5) 力对点O的矩 在 三个坐标轴上的投影为 (3–6)
2.力对轴的矩
(3–7) 力与轴相交或与轴平行(力与轴在同一平面内), 力对该轴的矩为零。
M O M o ( Fi ) ( xi Fiy yi Fix )
Fy cos( FR, j ) FR
(3 1)
(3 2)
3、简化结果分析
=
其中
MO d FR
o R
M o FRd
O O i
FR FR FR
(3 3)
1、空间力偶矩以矢量表示
空间力偶的三要素 (1) 大小:力与力偶臂的乘积; (2) 方向:转动方向; (3) 作用面:力偶作用面。
力偶矩矢
(3–11)
2、力偶的性质 (1)力偶中两力在任意坐标轴上投影的代数和为零 。 (2)力偶对任意点取矩都等于力偶矩,不因矩心的 改变而改变。
力偶矩
因
(3)只要保持力偶矩不变,力偶可在其作用面内 任意移转,且可以同时改变力偶中力的大小与力偶 臂的长短,对刚体的作用效果不变。
例3-7
已知:F , l , a,
M 求: x F , M y F , M z F
解:把力 F 分解如图
M x F F l a cos
M y F Fl cos
M z F F l sin
§3–5
空间力偶系
力偶矩矢
例4-13 已知:等厚均质偏心块的 R 100mm , r 17mm , b 13mm 求:其重心坐标。 解:用负面积法, 为三部分组成,设大半圆面积为 小半圆(半径为 )面积为 , 小圆(半径为 )面积为 ,为负值。 由对称性,有 而 ,
由
A1 y1 A2 y 2 A3 y 3 得 yC A A A 40.01mm 1 2 3
空间汇交力系的合力 称为力系的主矢
空间力偶系的合力偶矩
称为空间力偶系的主矩 由力对点的矩与力对轴的矩的关系,有
式中
分别表示各力
对
,
,
轴的矩。
力系简化的意义
—有效推进力 —有效升力 —侧向力 —滚转力矩 —偏航力矩 —俯仰力矩
飞机向前飞行 飞机上升 飞机侧移 飞机绕x轴滚转 飞机转弯 飞机仰头
2. 空间任意力系的简化结果分析(最后结果) 1) 合力 当 最后结果为一个合力。 合力作用点过简化中心。 当 时,
' Ry
' R
F Fix F1 F2 cos 232.9kN
' Rx
AB ACB arctan 16.7 AC
F 大小 FR'
F F 709.4kN 的方向余弦 cos F , i F 0.3283 F F 向下与x正 F 0.9446 向成70.84度角 cos F , j F
主矢大小 FR ( Fix ) 2 ( Fiy ) 2 方向
Fix cos( FR, i ) FR
作用点
主矩
作用于简化中心上
Fiy cos( FR, j ) FR
M O M O ( Fi ) FR ( Fx ) 2 ( Fy ) 2
Fx cos( FR, i ) FR
2. 计算的简易方法
1)利用对称性 2)分割法 3)负面积法
例4-12 已知:均质等厚Z字型薄板尺寸如图所示。 求:其重心坐标
解:厚度方向重心坐标已确定, 只求重心的x,y坐标即可。 用虚线分割如图, 为三个小矩形, 其面积与坐标分别为 A1 300mm 2 x1 15mm y1 45mm x 2 5mm y 2 30mm A2 400mm 2 A3 300mm 2 x 3 15mm y 3 5mm 则 Ai x i A1 x1 A2 x 2 A3 x 3 xC 2mm A A1 A2 A3 Ai y i A1 y1 A2 y 2 A3 y 3 yC 27mm A A1 A2 A3
例3-9 已知: 两圆盘半径均为200mm, AB =800mm, 圆盘面O1垂直于z轴,圆盘面O2垂直于x轴, 两盘面上作用有力偶,F1=3N,F2=5N,构件自重不计。 求:轴承A,B处的约束力。 解:取整体,受力图如图b所示。 由力偶系平衡方程 M x 0 F2 400mm FAz 800mm 0
(5)力偶没有合力,力偶平衡只能由力偶来平衡。
3.力偶系的合成与平衡条件
=
=
如同右图
有
为合力偶矩矢,等于各分 力偶矩矢的矢量和。
合力偶矩矢的大小和方向余弦
空间力偶系平衡的充分必要条件是 :合力偶矩矢等 于零,即
有 M ix 0 简写为
M iy M ix cos cos M M
最后结果为一合力。合力作用线距简化中心为
合力矩定理:合力对某点之矩等于各分力对同一点 之矩的矢量和。 合力对某轴之矩等于各分力对同一轴之矩的代数和。 (2)合力偶 当 时,最后结果为一个合力偶。此时与简化 中心无关。 当 ∥ 时 (3)力螺旋
力螺旋中心轴过简化中心
当
成角
且
既不平行也不垂直时
力螺旋中心轴距简化中心为
F
' R 2 2 ix iy
' R ix ' R
' R
' R
iy
主矩
M o M o F 3F1 1.5P 3.9P2 2355kN m 1
' R
(2)、求合力及其作用线位置。
Mo 2355 d 3.3197m ' FR 709.4
d x 3.514m 0 0 cos 90 70.84
M iz cos M
M iy 0
M iz 0
(3–12)
称为空间力偶系的平衡方程。
例3-8 已知:在工件四个面上同时钻5个孔,每个孔所受 切削力偶矩均为80N· m。 求:工件所受合力偶矩在 解:把力偶用 力偶矩矢表示, 平行移到点A 。 求力偶的投影 轴上的投影 。
M x M ix M 3 M 4 cos 45 M 5 cos 45 193.1N m M y M iy M 2 80N m M z M iz M 1 M 4 cos 45 M 5 cos 45 193.1N m
4、平面固定端约束
=
=
≠
=
例3-6 P 已知: 1 450kN, F1 300kN,
F2 70kN;
P2 200kN,
求: 力系的合力FR , 合力与OA的交点到点O的距离x, 合力作用线方程。
FR'
解: (1)向O点简化, 求主矢和主矩。
F Fiy P1 P2 F sin 670.1kN
第三章 一般力系的简化
一般力系实例
§3-3 平面一般力系向作用面内一点简化
1、力的平移定理
M B M B ( F ) Fd
2、平面一般力系向作用面内一点简化 ·主矢和主矩
F1 F1
F2 F2 Fn Fn
M1 M 0 ( F1 )
M 2 M 0 ( F2 ) M n M 0 ( Fn )
(4)平衡
当
时,空间力系为平衡力系
§3–7 重 心
1. 计算重心坐标的公式 对y轴用合力矩定理
质 心
有 对x轴用合力矩定理
有
再对x轴用合力矩定理
则计算重心坐标的公式为 (3–13) 对均质物体,均质板状物体,有
xc
V x
i
i
V
yc
V y
i
i
V
zc
V z
V
i i
称为重心或形心公式
3、 力对点的矩与力对过该点的轴的矩的关系
已知:力 ,力 在三根轴上的分力 用点的坐标 x, y, z , , ,力 作
求:力
对 x, y, z轴的矩
=
(3-8)
=
+0 -
=
(3-9)
= -
+ 0
=
(3-10)
比较(3-6)、(3-8)、(3-9)、(3-10)式可得
即,力对点的矩矢在过该点的某轴上的投影,等于 力对该轴的矩。
合力矩定理 M ( F ) M M ( F )后结果
合力 合力 合力偶 平衡
说明
合力作用线过简化中心
合力作用线距简化中心M O
FR 0 FR 0
MO 0 MO 0 MO 0 MO 0
FR
与简化中心的位置无关
与简化中心的位置无关
3. 实测法确定重心 如: 悬挂法
图a中左右两部分的重量是否一定相等?
4.质心—质点系的质量中心
rc mi r i m (3 15)
C——即为质点系的质心
投影到坐标系
xc
m x
i
i
yc
mi yi