四轮转向技术介绍
四轮转向技术的原理及应用前景浅析

四轮转向技术的原理及应用前景浅析四轮转向技术是指汽车的四个轮子都可以转动的一种转向技术。
随着汽车工业的不断发展和升级,四轮转向技术已经成为了汽车制造业的热门话题。
本文将对四轮转向技术的原理及应用前景进行浅析。
一、四轮转向技术的原理四轮转向技术是基于汽车转向系统的升级和改进而来的。
传统的汽车转向系统是通过前轮转向来完成汽车的转弯动作,而四轮转向技术则是通过对四轮都进行转向来实现更加灵活的转弯和控制。
四轮转向技术主要有两种类型:四轮同向转向和四轮反向转向。
四轮同向转向是指在车辆转向时,四个车轮同时向同一个方向转动。
这种转向方式可以让车辆在低速行驶时更加稳定,同时也能够提供更好的操控性能。
四轮反向转向则是指前轮和后轮在转向时朝着相反的方向转动。
这种转向方式可以让车辆在高速行驶时更加稳定,同时也能够提供更好的车身稳定性和操控性能。
四轮转向技术的原理主要是通过车辆转向系统的改进和升级来实现的。
通过对车辆的悬架系统、转向系统和车轮转向角度等方面进行优化和改进,可以实现四轮转向技术。
四轮转向技术可以有效地提高车辆的操控性能和行驶稳定性,同时也可以提升驾驶舒适性和安全性。
四轮转向技术的应用前景十分广阔,它可以在各种类型的汽车上得到应用。
四轮转向技术可以在小型车辆和城市车辆上得到应用。
由于小型车辆和城市车辆需要更加灵活的操控性能和更小的转弯半径,因此四轮转向技术可以帮助这些车辆实现更好的操控性能和行驶稳定性。
四轮转向技术的应用前景非常广阔。
它可以在各种类型的汽车上得到应用,并为车辆提供更好的操控性能、行驶稳定性和驾驶舒适性。
随着汽车工业的不断发展和升级,四轮转向技术将会在未来的汽车制造业中扮演重要的角色。
四轮转向技术

Any more information
please give some questions
液压式
电动式
机械转接
电控液压
电子控制
车速感应型
当车速小于某一数值时(一般为40km/h左右),前 后轮转向逆相位转向;而当车速高于该数值时,前后 轮同相位转向。车速感应型转向时后轮偏转的方向和 转角的大小要受车速高低控制并且随车速的高低而变 化。
转角感应型
这种4WS控制方式通过传感器判断车轮的偏转 角度,经过控制器分析后指令后轮随着前轮的左 右转动而进行同向偏转或反向偏转。
零相位转向模式
逆向位转向模式 同相位转向模式
零相位模式实际上就是普通的前轮转向 形式 控制器不需要指令后轮动作,只需保持 后轮的偏转角为零即可
零相位转向模式
逆向位转向模式 同相位转向模式
逆相位是指后轮的偏转方向与前轮 的偏转方向相反,大幅地减小转弯半 径。
零相位转向模式
(1) 比例控制:前馈控制(前后轮转向角与车速依存式)和反馈
控制(将车辆的运行状态反馈到控制系统,自动调节后轮转向 角)
策 略
(2) 动态补偿控制:前馈控制(转向角动态补偿)和反馈控制(转向力 矩动态补偿) (3) 主动控制:要求横摆速率中、高速时提高稳定性和转向响应性,低 速时提高小转弯大转向角转向操纵性
美国德尔福公司开发的 Quadrasteer 四轮转向系统
2000
GMC 2002
日产公司在其Skyline与 INFINITI G系上应用的四轮主 动转向系统(4WAS)
2000
雷诺公司将在其Laguna Coupe 上采用的“Active Drive”4WS技术
宝马第五代新7 Series 的 4WS 系统
四轮转向技术的原理及应用前景浅析
四轮转向技术的原理及应用前景浅析四轮转向技术是指汽车在行驶过程中通过改变四个车轮的转向角度来实现转弯、停车和控制车辆稳定性的一种技术。
相较于传统的前轮转向和后轮转向技术,四轮转向技术可以更灵活地应对不同路况和驾驶需求,提高车辆的稳定性、操控性和安全性。
随着汽车产业的发展和技术的进步,四轮转向技术已经逐渐成为汽车制造商和消费者关注的焦点之一。
本文将从四轮转向技术的原理和应用前景两个方面进行浅析。
一、四轮转向技术的原理四轮转向技术主要通过改变车辆前轮和后轮的转向角度来实现不同的驾驶功能。
在低速行驶时,四轮转向技术可以实现同向转向,即前后轮同时向同一方向转动,从而缩小车辆转弯半径,提高车辆的灵活性和驾驶便利性。
在高速行驶时,四轮转向技术可以实现逆向转向,即前后轮向相反方向转动,以提高车辆的稳定性和行驶安全性。
通过对车辆前后轮转向角度的精准控制,可以实现车辆在不同速度下的最佳转向效果,提高车辆的操控性和行驶平稳性。
四轮转向技术主要有机械式和电子式两种实现方式。
机械式四轮转向技术通过传统的机械连接装置来实现前后轮转向角度的同步变化,成本较低但精准度和灵活性有限。
电子式四轮转向技术则通过电子控制单元和电动马达来实现前后轮转向角度的精准控制,可以根据不同驾驶场景和需求实现灵活的转向效果。
1. 提高行驶稳定性和安全性四轮转向技术可以实现在高速行驶时逆向转向,即前后轮向相反方向转动,从而降低车辆的侧倾和过弯危险,提高车辆的行驶稳定性和安全性。
特别是在突发事故或极端路况下,四轮转向技术可以更快速、更精准地实现车辆的控制和避险,减少交通事故的发生几率。
2. 提高驾驶舒适性和便利性在低速行驶时,四轮转向技术可以实现同向转向,即前后轮向同一方向转动,从而缩小车辆转弯半径,提高车辆的灵活性和驾驶便利性。
对于城市拥堵和狭小驾驶空间的驾驶者来说,四轮转向技术可以更便捷地实现停车和调头,提高驾驶的舒适性和便利性。
3. 降低能耗和排放四轮转向技术可以通过最佳的转向效果,降低车辆在转弯和过弯时的能耗和排放,提高车辆的燃油经济性和环保性。
专题讲解-四轮转向控制
四轮转向控制四轮转向系统(4WS)把后轮与前轮一起转向,是一种提高车辆反应性和稳定性的关键技术。
把后轮与前轮同相位转向,可以减小车辆转向时的旋转运动(横摆),改善高速行驶的稳定性。
把后轮与前轮逆相位转向,能够改善车辆中低速行驶的操纵性,提高快速转向性。
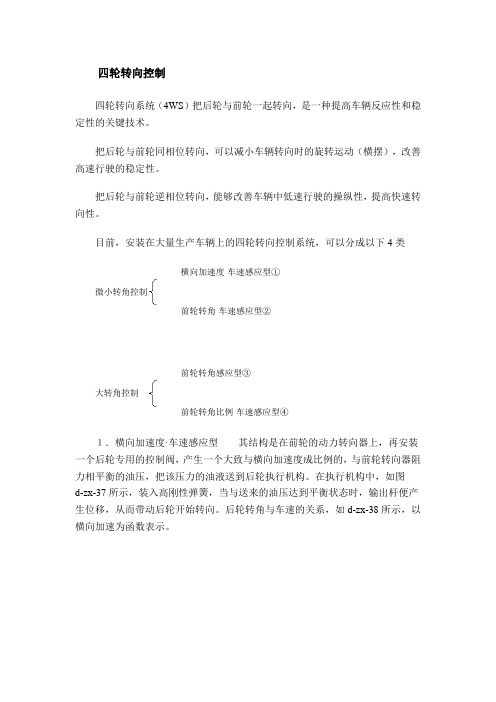
目前,安装在大量生产车辆上的四轮转向控制系统,可以分成以下4类横向加速度·车速感应型①微小转角控制前轮转角·车速感应型②前轮转角感应型③大转角控制前轮转角比例·车速感应型④1.横向加速度·车速感应型其结构是在前轮的动力转向器上,再安装一个后轮专用的控制阀,产生一个大致与横向加速度成比例的,与前轮转向器阻力相平衡的油压,把该压力的油液送到后轮执行机构。
在执行机构中,如图d-zx-37所示,装入高刚性弹簧,当与送来的油压达到平衡状态时,输出杆便产生位移,从而带动后轮开始转向。
后轮转角与车速的关系,如d-zx-38所示,以横向加速为函数表示。
1.储油罐2.泵3.前动力缸4.分配阀5.后动力缸6.弹簧7.控制器8.电磁阀图d-zx-372.前轮转角,车速感应型在该系统中,从油泵出来的油液直接流入图d-zx-39的电磁阀,车速传感器10,转角传感器11分别将车速和前轮转角信号输入计算机。
按计算机指令,控制油液流入后轮执行机构。
其后轮转角特性见图d-zx-401.储油罐2.泵3.前动力缸4.分配阀5.后动力缸6.弹簧7.控制器8.电磁阀9.切断阀10.车速传感器11.转角传感器。
图d-zx-39图d-zx-403.前轮转角感应型为了把前轮转角传给后轮,在前轮齿轮齿条式转向器的齿条轴上,安装了后轮转向齿轮,其角位移,通过中间传动轴,传给后轮转向器。
后轮具有小转角同相转向,大转角逆相转向的功能。
在微小转向的高速行驶时,形成了同相转向,获得了行驶稳定性,在大转角转向的极低速行驶时,变成逆相转向,获得了小半径转向性能。
4.前轮转角比例车速感应型在动力传至后轮转向轴之前,与前者基本相同,但后轮的执行机构由相位控制部分和动力补助部分构成。
四轮转向技术 4ws

LOREM IPSUM DOLOR
LO
LO
LO
ቤተ መጻሕፍቲ ባይዱ
LO
LO
LO
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et
dolore magna aliqua.
Content
1
四轮转向的作用
四轮转向的主要目的是提高汽 车在高速行驶或在侧向风力作 用时操纵稳定性 在汽车高速行驶时还易于由一 个车道向另外一个车道调整 改善在低速下的操纵轻便性, 亦即减少在停车场调车时的转 弯半径
(1)4WS车在高速行驶时的稳定性分析
4WS车高速行驶时,当受到侧向风或侧向路面干扰力时,车 身姿态变化小,便于修正方向盘
在高速行驶时,后轮与前轮同相位转向,且转角较小
从转向盘到后轮转向的时间很短,转弯时车身姿态变化小,即目
标行驶路线的跟踪行好
车身方向与实际行进方向没有很大的差别,在高速行驶时具
有稳定感
(2)4WS车在改变行车路线时的性能
后轮和前轮同一方向转动,在后轮也同样产生 侧向力,于是车身的侧偏角小,甚至可以为零 汽车可以平顺的换到行驶,从而提高了汽车的 操纵稳定性
LOREM IPSUM DOLOR
LO
LO
LO
LO
LO
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor inci didunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exe rcitation ullamco laboris nisi ut aliquip ex ea commodo consequat.
四轮转向技术的原理及应用前景浅析

四轮转向技术的原理及应用前景浅析
四轮转向技术在汽车行业中被广泛应用,它通过在汽车前后轮各增加一个独立的转向系统,实现了四个轮子的角度和转向方向的独立控制。
相比传统的两轮转向系统,四轮转向技术具有更强的操控性能和安全性,可以提高汽车的行驶稳定性和转弯半径的灵活性。
四轮转向技术的原理可以分为四种类型:动态四轮转向、全方位四轮转向、主动四轮转向和被动四轮转向。
动态四轮转向是根据汽车行驶速度和转弯半径的变化来调整前后轮的转向角度。
当汽车行驶速度较低时,通过将后轮与前轮反向转动一定角度,可以提高操控性能和减小转弯半径;而当汽车行驶速度较高时,将后轮与前轮同向转动一定角度,可以提高行驶稳定性。
全方位四轮转向是通过控制车辆的四个轮子的转向角度和转向方向,实现任意方向的移动和转弯。
这种技术可以极大地提高汽车的操控性和灵活性,适用于狭窄的城市道路和复杂的停车场场所。
主动四轮转向是由车辆自身的系统感知车辆行驶状态,通过计算机控制前后轮的转向角度和转向方向。
根据系统感知到的数据,可以实时调整转向角度和方向,提高行驶安全性和操控性能。
四轮转向技术在汽车行业中有广阔的应用前景。
四轮转向技术可以提高汽车的行驶稳定性和操控性能,提高驾驶安全性。
四轮转向技术可以实现车辆的小半径转弯,适应城市道路的狭窄环境,提高车辆的灵活性和通过性。
四轮转向技术可以实现车辆的全方位移动和转弯,适应特殊环境下的操控需求,提高车辆的应用性能。
四轮转向技术还可以提高汽车的能源利用效率,减小车辆的阻力和能耗,降低车辆的排放。
四轮转向技术的原理及应用前景浅析
四轮转向技术的原理及应用前景浅析随着高科技的快速进步,四轮转向技术逐渐崭露头角,并成为汽车制造业中的新热点。
四轮转向技术是一种采用更先进的科技,可以使汽车在行驶时更加稳定、灵活,提升汽车的安全性、便利性和舒适性等多方面的性能。
本文将对四轮转向技术的原理及应用前景进行浅析。
四轮转向技术,顾名思义,就是让车辆的四个车轮都能够进行自由转向的操作。
一般的汽车都是采用前轮转向技术,在车辆行驶时,前轮负责转向,而后轮仅仅是负责传动力,没有实现转向的功能。
而四轮转向技术则是将后轮也加入到转向系统中,使车辆在转弯时,四个车轮都能够实现协调转向,从而提高了车辆的行驶稳定性和灵活性。
四轮转向技术被广泛应用于工程机械、气垫船和战斗机等领域,而在汽车制造领域中,目前主要有两种四轮转向技术:机械式四轮转向和电子式四轮转向。
机械式四轮转向通常是由人工操作车辆以实现转向,而电子式四轮转向则是通过车载计算机系统来实现车辆的转向操作。
应用前景:四轮转向技术的应用前景非常广阔。
目前,一些高端品牌的汽车已经开始采用四轮转向技术,如奔驰、宝马、奥迪等。
这些品牌的四轮转向汽车不但可以提升车辆的稳定性和灵活性,而且还可以在紧急情况下实现更加快速的转弯操作,提高了驾驶人员的行驶安全性。
未来,四轮转向技术的应用将不断扩展。
首先,四轮转向技术可以使车辆在狭小的空间内进行更快速、更顺畅、更容易的转弯操作。
这种技术的应用将有助于提高城市交通的通行效率,解决城市拥堵交通问题。
其次,通过四轮转向技术,汽车还可以更好地应对不同路况的变化,提高车辆的行驶平稳性和驾驶舒适性。
最后,在四轮转向技术的基础上,可以通过智能化技术实现自动驾驶,这将对汽车行业的未来发展具有重要的推动作用。
总之,四轮转向技术是汽车制造业中的一项创新技术,它具有很大的应用前景,将极大地提高车辆的性能和驾驶体验。
因此,我们有理由相信,未来四轮转向技术将会成为汽车制造业中不可或缺的一部分。
四轮转向技术

现代汽车新技术——四轮转向技术(4WS)四轮转向技术(4WS)一、概述1、什么是4WS4 Wheel Steering 即除传统的前两轮转向外,后两轮也是转向轮。
提高高速行驶或侧向风作用下的操纵稳定性,改善低速行驶的操纵轻便性,减小转弯半径1980年代中期开始在轿车上应用2、四轮转向的几何运动关系2WS:后轮不转向,转向中心在后轴的延长线上4WS:后轮逆相转向,转中心比2WS车更靠近车辆,亦即转弯半径小四轮转向技术(4WS)u对于4WS 车,主要控制后轮的转向角u当后轮转向与前轮转向相同时称同相位转向u 当后轮转向与前轮转向相反时称逆相位转向3、后轮的两种转向方式四轮转向技术(4WS)u4、四轮转向的作用u四轮转向的主要目的是提高汽车在高速行驶或在侧向风力作用时的操纵稳定性u在汽车高速行驶时还易于由一个车道向另一个车道调整u改善在低速下的操纵轻便性,以及减小在停车场调车时的转弯半径u(1)4WS在高速行驶时的稳定性分析u4WS车高速行驶时,当受到侧向风或侧向路面干扰力时,车身姿态变化小,便于修正方向盘u在高速行驶时,后轮与前轮同相位转向,且转角较小u从转向盘到后轮转向的时间很短,转弯时车身姿态变化小,即目标行驶路线的跟踪性好u车身方向与实际行进方向没有很大差别,在高速行驶时具有稳定感u(2)4WS车在改变行车路线时的性能u后轮和前轮同一方向转动,在后轮也同样产生侧向力,于是车身的侧偏角小,甚至可以为零u汽车可以平顺地换道行使,从而提高了汽车的操纵稳定性u平动:纵向(surge)、横向(sway)、上下(heave)u转动:横摆(yaw)、侧倾(roll)、俯仰/点头(pitch)u在2WS车中,只有前轮转向,转角α,产生离心力,路面的侧向力(侧偏力)产生围绕重心的力矩u前轮转向初期,后轮直线行驶,无离心力,路面无侧向力u前轮路面的侧向力产生的围绕重心的力矩,使得车身围绕重心横向摆动(车身蛇形运动),操纵稳定性下降u理想的高速行驶转向,应该使车身方向与行进方向尽量一致,以抑制横向摆动u在4WS车中,前后轮同相转向,前后轮的同时产生离心力,路面的侧向力围绕重心的力矩互相平衡,抑制了横向摆动,保证了操纵稳定性四轮转向技术(4WS)(3)低速下的小转弯半径行驶当汽车在狭窄的停车场地转弯时,停车是否容易主要取决于转弯半径大小,4WS比2WS车转弯半径要小得多。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2WS转弯时的姿态
4WS
滞后时间
4WS前轮、后轮转角几乎同时发生,不产生滞后,汽 车转向响应更快,操纵性好
2WS车根据车速的不同,车身滑移角方向和大小会有很大的变化
4WS的转弯可能性
转弯时车身姿态
2WS车随车速的提高以向外甩尾的姿态进行转弯(横 摆角速度越大,尾部越向外甩)。
■四轮转向的模式
零相位转向模式
・控制器输出的指令为:后轮偏转角为零,此时和2WS转向状态一致
4WS
逆相位转向模式
・逆相位是指后轮的偏转方向与前轮的偏转方向相反,大幅地减小转弯半径
同相位转向模式
・后轮的偏转方向与前轮的偏转方向相同,车尾与车头同向运动,可以使车身在紧急转向 及躲避障碍时保持极高的稳定性
按结构分:机械式
液压式
电动式
车速感应
转角感应
■四轮转向的结构与原理
四轮转控制单元(ECU)、传感器、后轮转向执行机构等组成。
四轮转向的原理
汽车转向时,传感器将采集的前轮转角信号、车速信号、横摆角速度信号等送入4WS 电 控单元(ECU),电控单元将实时监控汽车的运行状态,根据传感器参数和控制策略分析 计算后轮转角,并驱动后轮转向执行机构动作,实现后轮转角的闭环控制。
■应用实例
BMW 7系 /整体主动转向系统
4WS
NISSAN GT-R/HICAS 4WS
ACURA RLX、HONDA PRELUDE、RENAULT LAGUNA……
以上
ACURA PAWS 四轮精准转向
・后悬架左右配置电控执行器,与动力总成系 统、EPS、VSA的行驶信息进行协调控制 ・可随意独立控制后轮束角(后轮左右轮转向 角)的变化
・制动时后轮正前束控制,提高制动稳定性 ・转向时反相控制,减少转向操作 ・弯道加速,降低不足转向倾向,提高循迹性 ・高速变线时同相控制,提高转向应答性
GOOD
4WS对操稳性能提升很大,碍于结构复杂和成本高,目前只在高端车型有用到。
■四轮转向的类型
四轮转向的类型
按控制方式分:车速感应型 转角感应型
4WS
车速感应型四轮转向系统的工作特点是后轮偏转的方向和转角大小主要受车速高低的控制,在转向过程中,同时
还受前轮转角、侧向加速度、横摆角速度等动态参数的综合控制,这种4WS系统综合考虑了汽车的各种动态参数对 汽车转向行驶过程中的操纵稳定性的影响。
转弯特性(车身滑移角)随车速变化,不 稳定的因素
4WS车可以使以上特性大幅改善:低速时前后轮转角 逆相,在高速时同相,根据车速变化调整后轮转角, 保持车身姿态的稳定,也就是说4WA车可以自由的控 制车身滑移角,稳定性好
用低速逆相和高速同相方向以最佳角度来转动后轮,可以使车 辆的行进方向与车辆朝向保持一致
4WS 四轮转向技术介绍
■什么是四轮转向
4WS
・四轮转向(4WS)是指当驾驶员操作方向盘时,不仅前轮产生转向动作,后轮也可主动 参与转向。
・ 4WS 汽车通常是在前轮转向系统的基础上,在汽车的后悬架上安装一套后轮转向系统, 并采用适当的控制策略,使得汽车在前轮转向的同时,后轮也参与转向,达到提高汽车机 动性和操稳性的目的。
4WS的三种转向模式
■四轮转向的模式
4WS
逆向位转向模式
减少转弯半径,提高机动性
4WS和2WS低速时转弯半径比较
过度转向, 甩尾的危险
前后轮同向 转向,使车 身横摆角速 度减少
同相位转向模式
高速变道、转向,提高稳定性
4WS和2WS高速时转向状态比较
■四轮转向提高操纵稳定性
转弯时滞后时间
2WS转向动作产生机理:
转角感应型四轮转向系统的工作特点是后轮偏转受前轮偏转控制,作被动转向,即后轮偏转方向和转角大小受方
向盘转动的方向和转角大小的控制。这种4WS系统存在一定的系统结构和动态控制的局限性,尤其在高速急转弯时, 使汽车的操纵稳定性恶化,在现代的4WS系统中已很少采用。
目前,4WS的控制方式综合考虑了以上两种基本的控制方式。汽车在不同的行驶状况和转向条件下,后轮的转向受 不同参数的控制。例如马自达在Capella上使用的4WS系统中采用方向盘转角及车速控制后轮转角,丰田 Soara上 4WS系统中采用前轮转角及横摆角速度控制后轮转角;