连续导向钻具组合三维准动力学分析模型及其导向力变化规律_刘夏荣
塔里木深井旋转地质导向钻井技术
【技术】塔里木深井旋转地质导向钻井技术文/张程光吴千里王孝亮吕宁,中国石油钻井工程技术研究院中国石油塔里木油田公司中国石化石油工程公司胜利分公司引言对于埋藏深、地质构造复杂的油藏,应用弯壳体导向螺杆钻具通常无法有效引导井身轨迹准确达到或穿越储集层,而旋转地质导向钻井因其技术优势被越来越广泛地应用,目前已成为一项主流技术。
近年来全球范围内的地质导向与旋转导向服务井数快速增长:以斯伦贝谢公司为例,地质导向作业井由2006年的近300 口上升至2009 年的700 口,旋转导向系统进尺则从2006 年的5 898 km 提高至2011 年的19 740km;2004—2010 年在国内各种复杂、难动用油气藏应用地质导向技术的水平井超过345 口。
塔里木油田某区块的薄砂层油层埋藏深、厚度小,且构造边缘横向发育不稳定。
为了更高效地开发该类油层,引入旋转地质导向技术,并通过不断摸索试验使该技术更好地适应区块地层条件,确保井眼轨迹始终处于油层中最佳位置。
1 塔里木油田深井薄油层钻井技术难点及对策①的层埋藏深、厚度薄。
目的层垂深超过5 000m,完钻井深5 500~6 000 m,采用传统滑动钻进方式会因井深增加造成摩阻扭矩的增加,对MWD(随钻测量)信号传输的要求也会提高;目的层为两套砂岩,油层薄,厚度仅为1~2 m。
为获得较好的开发效果,需采用双台阶水平井钻井。
旋转地质导向钻井技术的旋转钻进方式有利于岩屑运移和井眼清洁,能降低摩阻,从而提高水平井段延伸能力。
②裸眼井段长、岩性变化大。
二开裸眼井段长达5 000 m 左右,易出现托压和黏卡现象,渗漏层和垮塌层均处于同一井眼内,地层砂泥岩互层多,钻时不均匀,地层研磨性强。
因此,需控制合适的钻井液黏度和切力、根据导向工具的作业特点选择钻头型号,同时在旋转钻进的基础上加强短程起下钻协助带砂。
③构造边缘储集层横向展布不均、地层对比困难。
油藏构造边缘的砂体发育不稳定、地层倾角变化大,地层对比困难,增加了着陆位置判断和油层追踪的难度。
静态推靠式旋转导向钻具组合优化
静态推靠式旋转导向钻具组合优化
旋转导向钻井系统给钻井工程的发展带来了新的革命,它能够自动、灵活地调整井斜和方位,大幅度地提高了钻井速度和钻井安全性。
为了提高静态推靠式旋转导向钻井系统研制及应用水平,必须对旋转导向工具的导向力和作用方位进行准确的预测。
而对旋转导向钻具组合力学特性分析是实现对钻进趋势预测的基础性工作。
因此,建立完善的静态推靠式旋转导向钻具组合力学分析模型对于旋转导向工具的研制具有十分重要的意义。
在充分了解旋转导向工具结构和BHA力学特性分析方法的基础上,利用纵横弯曲法分别建立在二维和三维井眼中钻具组合力学特性分析模型和求解方法,得出钻头侧向力和钻头倾角的表达式。
进而得到钻进趋势角的大小,为井眼轨迹的预测提供指导。
通过对钻具结构的分析,以提高工具的造斜率为目标,分别研究钻进参数(钻压大小、导向力大小),工具结构参数(导向力作用位置、第一扶正器参数、柔性短节参数)对提高造斜率的影响。
从而给出优化RSBHA钻具组合性能的设计方案。
为旋转导向工具的研制提供参考。
为了防止井下出现复杂情况,对翼肋造成破坏,影响正常的钻井施工。
对影响加厚翼肋处挠度的影响因素进行分析。
另外,探讨了第一扶正器的直径和位置对加厚翼肋挠度的影响,相应的也给出了第一扶正器的直径和位置的设计系列。
并进一步讨论井壁弹性对RSBHA工具的影响,利用赫兹接触理论建立钻柱与井壁的接触分析模型,分析了不同的井眼曲率和岩石弹性模量对旋转导向工具钻
头侧向力的影响。
复合钻井技术研究及应用课件
复合钻井技术研究及应用
汇报主要内容
• 概述 • 复合钻井技术优势 • 理论研究情况 • 钻具组合特性 • 现场应用效果
复合钻井技术研究及应用
概述
复合钻井技术依靠转盘与井下动力钻具的复合运动,驱动钻 头共同破岩,提高破岩效率,应用预弯曲井下动力钻具,增加了 对钻头的导向能力控制,通过对复合运动情况下钻柱准动力学、 动力学原理分析,使钻头的产生的侧向力克服地层造斜力,从而 推动钻头沿设计轨迹的方向运动,实现直井中防斜打快,斜井中 轨迹控制。配合高效PDC钻头与MWD等工具,可简化施工工序、实 现一套钻具组合完成定向、增斜、稳斜、降斜钻井施工工序,从 而缩短钻井周期、提高机械钻速,节约钻井成本。
复合钻井技术研究及应用
技术优势
• 复合钻井的技术优势有: • 1、实现复合钻井增斜,缩短滑动钻进井段,增斜率最
高可达到5~6°/100米; • 2、明显改善井身质量,不但保证中靶,而且缩小全角
变化率,起下钻变得相对容易; • 3、在直井防斜打快中应用,在上部或中部井段应用复
合钻井技术,先期控制井眼轨迹,减少在可钻性差的地 层的扭方位作业; • 4、是在防碰绕障井应用,下入合适的钻具组合复合钻 井,绕障时不需起下钻作业,方便准确。
复合钻井技术研究及应用
准动力学模型
导向力计算模型:
Fs
1 n
Fs2Fs2
s arcF tsa /n F s ()
2
Fs
F()
0
2
Fs
F()
0
复合钻井技术研究及应用
准动力学模型
合导向力仿真结果:
:
复合钻井技术研究及应用
动力学模型
钻柱振动物理模型:
连续导向钻具组合三维准动力学分析模型及其导向力变化规律

型求 解 。 向合 力方 向角 ( 向合力 与高 边 的夹 角)为 : 导 导
口 。一 a ca ( ・ F ) rt n F。 / () 2
2 主要参 数对连 续导 向钻具组 合复 合钻井导 向力的影响 规律
钻具组 合 为 :2 5 9 D 1 . P C钻 头 +稳 定 器 +单 弯 螺 杆 + 1 5 Cq 2 4 6 D - 1 mm 稳 定 器 + 1 5 6 DC ( 1 8 m) +
[ 中图分类号]T 9 1 2 E 2.
[ 文献标识码] A
[ 文章编号]1 0 0 0—9 5 2 0 )O 一 1 2 2 7 2(0 6 l 0 3 —0
对 于连 续导 向钻 具组 合来 说 ,由于其 弯螺 杆 的存在 ,使 得其 在任 何一 个 瞬态 的受力 变形 都有 其独特
的特征n 。这 个 特征 主要 来 源于螺 杆 的弯 曲面 。在 滑动 导 向钻 具 组合 连续 导 向钻 井 技 术 中 ,这个 弯 曲 叫] 面就是 导 向工 具 面 ,这里 定义 为 工 具 面 ,其 相 对 于井 跟 高 边 的 夹 角 ( 高边 顺 时 针 计 )定 义 为 工 具 面 从 角 。这样 ,连续 导 向钻具 组合 旋转 钻 井时 其特 点可 以归 纳为一 个工 具 面不 断有 规 律 改变 的过 程 ,其 总体 导 向效 果可 以用钻 柱 旋转 一周 内的钻 头上 的合 侧 向力矢 量来表 述
,
则工 具面 角变 化步 长 为 △c 2 / 。 算点 数应 大 于或等 于 3 。 具 组合 旋转 一 周 内在 钻头 上作 用 的导 c一 n n 计 , 6钻
向合力 F 为 : 。
F|一 +
2 - 2
旋转导向钻具三维小挠度稳态分析的数学模型
! " # $ % & " # ’ ( " )& * + % ) , * . # /" 0 " ) , ’ , * . * # " . , # % % . ’ 0 * # # * &$ * ) % 1 1 23 " , , % & 3 ) ’ # $, & " ) ) + % ) % ( # ’ * 0 14
(: ) , 8 ; ) * + " = ( 58 %6 $ 1 0 : :6< :
% 5 :
( % 6
"2 = ’ 3’ < ( 5 3’ 16 : " $ % 5 : # "2 = " > = , ’& = / / 0& " ( "] % " = " ( "] % " [ ) [ / > * # "2 / > * # "2)
第%期
李子丰等:旋转导向钻具三维小挠度稳态分析的数学模型
7 (
在井口处, 单位矢量为!; 单位 ! 轴向北, ! 轴向东, 矢量为"; 单位矢量为 #。 " 轴向下, ( )自然曲线坐标系为 ( ,", ) , 其中$ ," 和 " $ $ !$ # !$ 分别为钻柱变形线的切线方向、 主法线方向和副法 $ # 线方向的单位向量。 ( )直角笛卡尔井眼底部坐标系 # 原点 # 取 # $ &, % 在钻头处, 指向钻柱上部, 单位矢量 & 轴沿井眼轴线, ; 轴 垂 直 于& 轴, 指 向 井 眼 低 边, 单位矢量为 为$ $$ ; 轴由右手法则确定, 单位矢量为$ 。 $ % % &
静态推靠式旋转导向的导向力变化规律模拟研究
控更合适。
基于静态推靠式旋转导向系统的结构及工作原理,通过模拟实验模拟研究静态推靠式旋转导向钻井工具的两种调控模式,为下一步优选调控模式和提高调控精度提供技术支持。
2 实验装置2.1 水平实验架如图1所示,水平实验架是整套装置的主体部分,用于安装驱动电机、固定模拟井筒、安装测量传感器等,在前后两端有加压手轮,可根据需求加压。
1 引言随着我国石油资源的不断开采,水平井、大位移井、多分支井等复杂井越来越多。
而旋转导向钻井技术就能够很好地解决这些复杂井钻井的技术难题。
目前,国内已经研制出静态推靠式旋转导向钻井系统,现场应用过程中发现国产旋转导向系统的工具面调控误差较大,误差来源可能为旋转导向系统的调控机制。
由于推靠式旋转导向系统的导向合力与偏心位移调控不完全等效,工具面调控误差很可能院子调控机制。
为了减小工具面调控误差,需要理论与实验探究导向合力调控还是偏心位移调静态推靠式旋转导向的导向力变化规律模拟研究韩东东(中海油能源发展股份有限公司工程技术分公司,天津 300452)摘要:目前,国内已经研制出静态推靠式旋转导向钻井系统,为了提高井眼轨迹调控精度,需要优选出适合静态推靠式旋转导向工具的调控方式,来减小工具面调控误差。
为了实现该目标,在静态推靠式旋转导向钻井模拟装置上,开发并实现了响应的模拟实验程序。
通过改变钻进参数(钻压、转速)及参考工具面方向,对比分析了基础力较大、较小的两种情况下,不同参考工具面方向是导向翼肋的导向力方向、偏心位移方向,以及钻头侧向力方向随钻进参数的变化规律。
研究结果表明,在水平井眼中导向合力相差不大的情况下,采用较大基础力方案可以有效增加造斜能力;偏心位移的调控机制更适合静态推靠式旋转导向,并且偏心位移的方向十分稳定,不易受到钻进参数的影响。
研究成果能够为优选静态推靠式旋转导向系统的井眼轨迹调控模式、减小工具面调控误差提供支持。
关键词:静态推靠式旋转导向系统;模拟实验;钻头侧向力;导向合力;偏心位移1—加压手轮;2—压力传感器;3—伺服电机;4—转速传感器;5—模拟井筒;6—模拟钻柱;7—模拟旋转导向装置组件;8—径向位移传感器;9—局部加粗的井筒;10—模拟钻头与侧向力传感器;11—岩心和底座;12—压力传感器图1 水平井眼钻柱动力学模拟装置结构示意图1 —上主轴;2—硬质合金处理的芯轴端面;3—非旋转外套;4—芯轴;5 —旋转导向翼肋;6—非旋转外套端面;7—下主轴(接钻头)图2 模拟旋转导向钻井工具结构简图2.2 模拟旋转导向钻井工具模拟旋转导向钻井工具整体结构示意图如图2所示。
定向井工程师培训系列之五(定向井钻具组合)
--定向井常用钻具组合--
陈秋炎 200908 新疆
一
定向井常用钻具组合的分类 定向井常用钻具组合的分类 常规钻具组合 导向钻具组合 旋转导向钻具组合
二
三
四
一、定向井常用钻具组合的分类
一、常规钻具组合 造斜钻具组合 斜向器(也叫变向器)造斜 井下马达造斜 增斜钻具组合 稳斜钻具组合 降斜钻具组合 二、导向钻具组合 三、旋转导向钻具组合
二、常规钻具组合-增斜钻具组合
常用增斜钻具组合为:钻头十近钻头扶正器十非磁钻铤十钻铤(非磁钻 铤和钻铤的总长度为18~30米之间)十扶正器十钻铤(10米)十扶正 器十钻铤十随钻震击器十加重钻杆十钻杆(见图9-10,从下至上,增 斜效果越来越强。图中UG是指尺寸不足的扶正器)
二、常规钻具组合-增斜钻具组合
施工注意事项: 1.按设计钻井参数钻进,均匀送钻,使井眼曲率变化平缓。 2.每钻进25~50米测量一次,掌握井斜、方位的变化趋势,随时跟踪轨迹走 向。如果增斜率不能满足设计要求,应及时采取措施: (1)调整钻压改变增斜率。增加钻压可使增斜率增大,减小钻压,则使增斜 率降低。 (2)更换钻具组合,改变近钻头扶正器与相邻扶正器之间的距离。改变的范 围为10~30米,距离越短,增斜率越低,距离越长,增斜率越高; (3)改变近钻头扶正器与相邻扶正器之间的钻铤刚性,刚性越高,增斜率越 低;刚性越低,增斜度越高。 (4)钻头底部距近钻头扶正器翼片中部的距离为0.7~1.2米。 3.如果增斜率比设计值稍低(1.5°/30米以内),可采用强行增斜法。 (1)接单根后,开泵至设计排量,慢慢加压至设计钻压的75%左右; (2)转动转盘至设计转速,同时逐步增加钻压至允许的最大钻压; (3)钻完一个单根时,马上停转盘,钻压不回零,上提钻具。 (4)划眼时,井底的最后2米左右不划眼。 采用强行增斜法要注意:一是当前钻进的转盘扭矩不应过大;二是启动转盘时, 要保持钻压达到预定的数值;三是整个井下钻具各组件质量应合格;四是采用 这种特殊方法只能达到微增效果(增斜率可提高1.2°/30米左右——经验数 据)。
旋转导向工具研究现状及发展趋势
Keywords: rotary steeringꎻ borehole trajectory controlꎻ research statusꎻ development trend
0 引 言
旋转导向技术是目前国内外石油钻井领域先进
的井眼轨迹控制技术ꎬ 该技术可以使钻具在旋转钻
井的过程中按照预设井眼轨道实施钻进ꎮ 旋转导向
工具作为实施该技术的重要装备ꎬ 它集成了井下恶
劣环境下的机、 电、 液一体化前沿技术ꎬ 体现了当
∗ 基金项目: 湖北省技术创新专项 “ 智能油气钻采井眼轨迹控制工具研究” (2019AAA010) ꎮ
因此采用的仍是其传统的调制式推靠控制方法ꎻ 而
导向扶 正 套 带 动 钻 头 偏 转 部 分 继 承 了 PowerDrive
Xceed 动态指向式工具的原理 [6] ꎮ 基于此ꎬ 该公司
将其定义为复合式旋转导向工具ꎮ 由于推靠垫块不
是作用在井壁上ꎬ 而是作用在工具导向扶正套内壁
上ꎬ 使工具可以适用于软硬地层ꎬ 在全程旋转钻进
和静态式ꎮ
1 1 推靠式旋转导向工具
2018 年ꎬ Weatherford 公司推出了一种新的全
旋转推靠式工具 Magnus [2] ꎬ 如图 1 所示ꎮ
1—钻头ꎻ2—推靠垫块ꎻ3—无刷直流电机ꎻ
4—近钻头井斜角、伽马传感器ꎻ5—稳定器ꎮ
图 1 Magnus 工具结构图
Fig 1 Magnus tool structure
际大型跨国油服公司所垄断ꎮ 为缩小与国外技术的差距并取长补短ꎬ 详细论述了几种国外最新的
川南深层页岩气旋转导向钻井技术瓶颈的突破!
川南深层页岩气旋转导向钻井技术瓶颈的突破!严俊涛等:川南深层页岩气旋转导向钻井技术瓶颈的突破作者 | 严俊涛、叶新群、付永强、李伟、黄南、王业众摘要:川南泸州区块龙马溪-五峰组页岩气储层埋深大、温度高、地层孔隙压力高、甜点地层高硅高钙,导致储层钻井效率低、周期长。
自2019年至今,通过旋转导向配套工具的应用,满足了深层页岩气甜点靶体精确地质导向轨迹控制的工程技术要求,但较高的工具失效率(56.4%)与较长的钻井周期(平均111 d),成为制约深层页岩气高效开发的工程技术瓶颈。
为提高钻井效率,优选了目前应用率高、钻井效果好的斯伦贝谢公司旋转导向工具开展深层页岩气学习曲线研究,为深层页岩气制订了提速提效技术方案。
现场实施结果表明:提速提效技术方案的应用大幅提高了储层钻井效率,与标准页岩气旋转导向钻具组合应用阶段相比,调整完善阶段Ⅰ类储层钻遇率由90.4%提升至92.7%,铂金靶体钻遇率由58.8%提升至82.1%;四开平均机械钻速由5.58 m/h提升至6.17 m/h,钻井周期由54.89 d缩短至50.54 d。
该技术方案对于加快川南深层高温高压页岩气勘探开发和产能建设具有重要意义,可以帮助作业者在深层页岩气储层钻井作业中提高钻井效率并缩短钻井周期。
关键词:深层页岩气高温高压钻井提速斯伦贝谢公司旋转导向学习曲线技术突破0 引言四川南部的龙马溪-五峰组页岩层已探明页岩气地质储量1.06×1012m3,占全国页岩气探明储量的56%,2020年页岩气产量达到116.1×108 m3,成为国内天然气主要增长点。
随着川南页岩气勘探开发持续推进,产能建设重点将由中深层页岩气(垂直深度<3500 m)转移至资源储量占80%的深层页岩气(垂直深度>3500 m),其中泸州区块未来五年规划年产能将达到80×108m3。
而由于川南泸州区块龙马溪-五峰组页岩气储层埋深大、井下温度高、地层孔隙压力高、甜点地层高硅高钙等原因,导致储层钻井效率低,平均钻井周期达到111 d。
连续管钻井肋式定向器执行机构偏置位移优化
◀钻井技术与装备▶连续管钻井肋式定向器执行机构偏置位移优化∗邢志晟1ꎬ2㊀孔璐琳3㊀祝传增4㊀郑硕1ꎬ5㊀焦滨海1ꎬ2㊀蒋世东1㊀李猛1(1 重庆科技学院石油与天然气工程学院㊀2 中国石油大学(北京)㊀3 中国石油勘探开发研究院4 中国石油国际勘探开发有限公司中油阿克纠宾油气股份公司㊀5 中海石油(中国)有限公司蓬勃作业公司)邢志晟ꎬ孔璐琳ꎬ祝传增ꎬ等.连续管钻井肋式定向器执行机构偏置位移优化[J].石油机械ꎬ2023ꎬ51(2):26-32XingZhishengꎬKongLulinꎬZhuChuanzengꎬetal.Researchonoptimizationofactuatoroffsetdisplacementofrib ̄typeorientationtoolforcoiledtubingdrilling[J].ChinaPetroleumMachineryꎬ2023ꎬ51(2):26-32.摘要:为了提高连续管肋式定向器井眼轨迹控制效果及定向效率ꎬ结合最小能量原则ꎬ建立了肋式定向器执行机构偏置位移矢量模型ꎮ根据旋转偏置位移理论对定向器的执行机构进行偏置位移矢量合成与分解㊁分位移矢量求解㊁工作过程与工具面数学关系分析ꎬ提出了分位移矢量计算方法ꎮ并结合实际工程中的设计要求ꎬ采用就近原则和最小能量原则进行三翼肋分位移矢量计算ꎮ综合考虑井眼扩大㊁实际钻进时定向器外套的转动等影响ꎬ建立了连续管定向器纠偏过程中 定向模式 及 保持模式 的肋位移控制方案ꎬ得到了肋位移变化的规律ꎮ研究结果表明:连续管钻井肋式定向器工作过程中ꎬ单肋位移的幅值决定了合位移的大小ꎻ在导向过程中ꎬ当三翼肋工具面角相隔120ʎ时ꎬ某些运动规律相同ꎻ连续管钻井进入斜直井段时ꎬ此时不存在工具面ꎬ此时属于 钻进模式 ꎬ各肋位移相同ꎮ所得结论可为连续管钻井肋式定向器导向控制提供理论基础ꎮ关键词:连续管钻井ꎻ肋式定向器ꎻ执行机构ꎻ偏置位移ꎻ优化研究中图分类号:TE921㊀文献标识码:A㊀DOI:10 16082/j cnki issn 1001-4578 2023 02 004ResearchonOptimizationofActuatorOffsetDisplacementofRib ̄TypeOrientationToolforCoiledTubingDrillingXingZhisheng1ꎬ2㊀KongLulin3㊀ZhuChuanzeng4㊀ZhengShuo1ꎬ5㊀JiaoBinhai1ꎬ2㊀JiangShidong1㊀LiMeng1(1 SchoolofPetroleumandNaturalGasEngineeringꎬChongqingUniversityofScienceandTechnologyꎻ2 ChinaUniversityofPe ̄troleum(Beijing)ꎻ3 PetroChinaResearchInstituteofPetroleumExplorationandDevelopmentꎻ4 InternationalExplorationandDevel ̄opmentCo.Ltd.ꎬCNPCAktubinOil&GasCo.Ltd.ꎻ5 PengboOperationCompanyofCNOOC(China)Co.ꎬLtd.)Abstract:Inordertoimprovethewelltrajectorycontrolperformanceandorientationefficiencyoftherib ̄typeorientationtoolforcoiledtubingdrillingꎬtheactuatoroffsetdisplacementvectormodeloftherib ̄typeorientationtoolwasestablishedfollowingtheprincipleofminimumenergy.Throughthecomposinganddecomposingoftheac ̄tuatoroffsetdisplacementꎬsolutionofthedisplacementcomponentvectorꎬandinvestigationonthemathematiccorrelationbetweentheoperationprocessandthetoolfaceaccordingtothetheoryofrotaryoffsetdisplacementꎬthecalculationmethodofthedisplacementcomponentvectorwasproposed.Moreoverꎬgiventheactualengineeringde ̄62 ㊀㊀㊀石㊀油㊀机㊀械CHINAPETROLEUMMACHINERY㊀2023年㊀第51卷㊀第2期∗基金项目:国家自然科学基金面上项目 耦合动力土反力作用的深水井口多轴疲劳理论和时变可靠度研究 (51974052)ꎻ重庆市基础研究与前沿探索项目 连续管钻井(塞)管柱底部激振波及规律和振扭耦合多轴疲劳研究 (cstc2019jcyj-msxmX0199)ꎻ全国大学生科技创新项目 连续管钻井定向器执行机构偏置位移优化及控制模拟研究 (202111551008)ꎻ重庆市教委科学技术项目 基于多源信息的连续管钻井定向器肋板轨迹规划及智能控制方法研究 (KJQN201901544)ꎮsignrequirementꎬthedisplacementcomponentvectorofthetriple ̄riborientationtoolwascalculatedfollowingtheprinciplesofproximityandminimumenergy.Theribdisplacementcontrolschemeswiththe directional and holding modesoftheorientationtoolduringdeviationcorrectionweredevelopedwithconsiderationtothebore ̄holeenlargementandtheeffectsofthetooljacketrotationduringdrillingꎬandthevariationpatternoftheribdis ̄placementwasobtained.Theresearchresultsshowthatthedisplacementmagnitudeofasingleribdeterminesthemagnitudeoftheresultantdisplacementꎬduringtheoperationoftherib ̄typeorientationtoolforcoiledtubingdrill ̄ingꎻthetripleribswithtoolfaceazimuthsgappedby120ʎsharesomeidenticalmotionpatternsduringsteeringꎻcoiledtubingdrillingofaslantholeisassociatedwithnotoolfaceandrepresentsthe drilling modecharacterizedbyidenticaldisplacementofeachrib.Theresearchresultsprovideatheoreticalbasisforsteeringcontroloftherib ̄typeorientationtoolforcoiledtubingdrilling.Keywords:coiledtubingdrillingꎻorientationtoolꎻactuatorꎻoffsetdisplacementꎻoptimizationresearch0㊀引㊀言连续管钻井技术(CTD)是国际公认的全新钻井模式ꎬ高难度前沿技术ꎬ具有钻柱连续㊁带压作业㊁不间断循环㊁易于预置光纤和电缆㊁适合欠平衡钻井和气体钻井等显著特征[1]ꎮCTD具有降本增效㊁减少污染㊁安全快捷等优势ꎬ克服了常规钻井技术和方式难以解决的问题ꎬ目前在北美已广泛应用于页岩油气㊁煤层气及致密油气等非常规油气藏的开发[2]㊀ꎮ页岩气钻井大多数为水平井ꎬ传统的井下马达导向为滑动钻进ꎬ连续管管柱不能旋转㊁单一滑动钻进㊁强度和疲劳寿命低于常规钻杆㊁大钻压施加受限㊁应对硬地层性能差㊁遇卡后解卡能力不足等局限性没有得到充分认识[3]ꎮ川渝地区页岩气资源丰富ꎬ但CTD在国内的应用仍处于起步阶段ꎮ不同于常规钻柱ꎬ连续管是柔性管柱ꎬ具有不可旋转性ꎬ必须应用井下定向器调整工具面方可达到有效钻进的目的[4]ꎮ第一㊁二代CTD定向器下接弯螺杆ꎬ所钻出的井壁粗糙ꎬ导致连续管在钻进过程中极易发生屈曲ꎬ从而影响钻压传递ꎬ导致钻进困难[5]ꎮCTD肋式定向器可解决这一问题ꎬ该定向器通过控制其关键机构(执行机构)输出偏置位移形成一定的工具面角ꎬ从而进行井眼轨迹控制ꎮ可见ꎬCTD定向器的执行机构偏置位移规律是连续管钻井井眼轨迹控制的理论基础[6-9]ꎮ目前国外连续管钻井定向装置可分为3大类ꎬ分别是液压定向器㊁电驱动定向器以及电液驱动定向器ꎮ国外的导向钻井技术在20世纪末已经相当成熟ꎬ该工具的相关技术长期被国际大型跨国油服公司所垄断ꎬ但其对我国实行了技术封锁ꎬ而国内连续管定向工具的研究才刚起步ꎮ近几年ꎬ虽然国内在该技术的许多领域已有突破性进展ꎬ但与国外技术尤其是新的旋转导向工具技术方面相比ꎬ仍有较大差距[10]ꎮ笔者在执行机构物理建模的基础之上ꎬ进行执行机构偏置位移优化研究ꎬ以期为定向器导向控制提供理论基础ꎮ1㊀定向器技术分析1 1㊀定向器结构连续管钻井定向器结构如图1所示ꎬ主要包括动力装置㊁控制装置和压力构件等ꎮ其中动力装置包括1个钻井泵ꎬ用于向压力构件提供高压流体ꎬ控制压力构件在正常和径向延伸位置间移动ꎻ还包括与控制装置相关联的电动机ꎮ控制装置安装在电动机的旋转机构中ꎬ钻井电动机包括动力组件和轴承组件ꎬ其中转向装置分布在轴承组件中ꎻ每个控制装置包含1个流体控制阀ꎬ以及控制每个阀的阀门制动器ꎮ压力构件包括1个活塞ꎬ活塞受到来自动力装置的高压流体作用ꎬ使肋构件发生径向移动ꎻ还包括与压力构件相关联的传感器ꎬ用于接收和转化压力构件与参考位置之间位置关系的信号ꎮ1 2㊀工作原理在钻井过程中ꎬ电动机为钻头提供旋转动力ꎬ电动机和钻头之间的轴承组件向连接钻头的钻杆提供横向和轴向支撑ꎮ转向装置分布在钻井马达或轴承组件中ꎬ在钻井过程中提供方向控制ꎮ转向装置是安装在轴承箱外表面的多个肋ꎮ每个肋在外壳的正常或折叠位置与径向延伸位置之间移动ꎮ当处于延伸位置时ꎬ每个肋向井筒内部施加压力ꎮ为了改变钻井方向ꎬ激活1个或多个肋ꎬ即在每个肋上施加所需的力向外延伸ꎮ每个肋上的力的大小是独立设置和控制的ꎬ肋在钻头上产生一定的偏置力ꎬ接触井壁后ꎬ靠井壁的反作用力使钻头产生侧向切削722023年㊀第51卷㊀第2期邢志晟ꎬ等:连续管钻井肋式定向器执行机构偏置位移优化㊀㊀㊀力ꎬ从而实现导向[11]ꎮ动力装置分布在包含多个传感器的轴承组件中ꎬ传感器用于确定每个肋施加在井筒上的力ꎮ动力装置响应传感器后ꎬ通过电气控制单元或电路控制动力单元激活1个或多个肋板ꎬ从而控制肋的伸缩ꎮ控制电路可安装在钻井电动机上方或钻井电动机旋转部分的适当位置ꎮ对于小井眼ꎬ万向轴接头分布在转向装置的支座上ꎬ提供转向功能ꎮ1 钻头ꎻ2 肋板ꎻ3 压力构件ꎻ4 控制装置ꎻ5 壳体ꎻ6 联轴器ꎻ7 空心驱动轴ꎻ8 长轴ꎻ9 钻井马达ꎻ10 转子ꎻ11 定子ꎮ图1㊀连续管钻井定向器结构示意图Fig 1㊀Schematicstructureoftherib ̄typeorientationtoolforcoiledtubingdrilling2㊀合位移矢量的计算2 1㊀肋位移基准确定以连续管定向器中心轴线与井眼中心轴线重合的初始位置为基准(见图2a)ꎬ规定此时各单肋位移为0ꎻ若连续管定向器各肋支撑在井壁ꎬ且位移相等ꎬ此时为保持钻进模式(见图2b)ꎻ若各肋位移不全相等ꎬ则称为定向模式(见图2c)ꎮ假设井壁呈刚性ꎬ则单肋最大伸缩位移量为:|Ω|max=κdh-dor(1)式中:|Ωmax为单肋的最大工作位移ꎬmꎻdh为井眼直径ꎬmꎻdor为定向器外径ꎬmꎻκ为井眼扩大系数ꎬ无因次ꎮ图2㊀连续管定向器肋位移示意图Fig 2㊀Schematicribdisplacementoftherib ̄typeorientationtool2 2㊀合位移矢量方向的确定在连续管定向器各肋所在的共平面建立平面直角坐标系XOYꎬΩ=OGң为合位移矢量ꎬΩ1=OG1ң㊁Ω2=OG2ң和Ω3=OG3ң分别为3个分位移矢量(见图3a)ꎬ合位移矢量Ω的取值范围为正六边形ꎬ正六边形与外圆(井筒)之间的区域为无效控制区域(见图3b黄色区域)ꎬ若各肋周向位置发生转动(受摩擦扭矩影响)ꎬ则可形成内外圆之间的无效控制区域(见图3b红色+黄色区域)[12-13]ꎮ图3㊀连续管定向器合位移矢量解析Fig 3㊀Analysisoftheresultantdisplacementvectoroftherib ̄typeorientationtool82 ㊀㊀㊀石㊀油㊀机㊀械2023年㊀第51卷㊀第2期通过上述分析ꎬ最大可使用合位移矢量并不是单肋最大工作位移Ωmaxꎮ通过位移合成原理及平面几何分析可得最大可使用合位移矢量幅值为:Γmax=㊀32Ωmax(2)式中:Γmax为定向器最大可使用合位移幅值ꎬmꎮ如图3a所示ꎬφ0为1#肋初始工具面角(0ʎ~360ʎ)ꎬ合位移矢量OGң的方向即连续管井下工具组合的工具面角ω的方向ꎮ若1#肋位置确定ꎬ即1#肋工具面角φ0确定ꎬ则2#㊁3#肋工具面角也可以确定ꎮ那么工具面角ω与各肋位移关系可表示为[14]:cosω=ΩYΩ=Ω1cosφ0+Ω2cosφ0+120ʎ()+Ω3cosφ0+240ʎ()㊀ΩX2+ΩY2(3)式中:φ0为1#肋的初始工具面角ꎬ(ʎ)ꎻω为井下工具的工具面角ꎬ(ʎ)(|Ω|ʂ0)ꎻ|Ω|=0时为保持钻进模式ꎬ不存在工具面角ꎮ若已知设计纠偏轨道工具面角ωꎬ则根据式(3)可确定合位移矢量Ω的方向ꎮ2 3㊀合位移矢量大小的确定定向器肋合位移与井眼中心线的几何关系如图4所示ꎮ由设计纠偏轨道圆心角θꎬ可确定连续管定向器所需要的造斜率ρꎮ然后ꎬ能够得到定向器肋合位移矢量Ω的大小ꎮ图4㊀定向器肋合位移与井眼中心线的几何关系Fig 4㊀Geometricrelationshipbetweentheribdisplacementoftherib ̄typeorientationtoolandthewellboreaxisθ=ρL/30(4)ρ=360ˑ30πcosπ-β2æèçöø÷M12(5)sinβ=ΩM12(6)式中:θ为设计纠偏轨道圆心角ꎬ(ʎ)ꎻρ为连续管定向器每30m的造斜率ꎬ(ʎ)ꎻL为井段长ꎬmꎻβ为井眼中心线与M12的夹角ꎬ(ʎ)ꎻM12为接触点1㊁2之间的长度ꎬmꎮ3㊀定向器肋合位移矢量控制在确定合位移矢量Ω的大小和方向之后ꎬ根据式(3)可求解3肋的分位移(Ω1㊁Ω2㊁Ω3)ꎬ可整理为:Ωsinω=Ω1sinφ0+Ω2sinφ0+120ʎ()+Ω3sinφ0+240ʎ()Ωcosω=Ω1cosφ0+Ω2cosφ0+120ʎ()+Ω3cosφ0+240ʎ(){(7)㊀㊀方程组(7)仅有2个方程ꎬ但有3个未知数Ω1㊁Ω2和Ω3ꎬ故此方程有n个解(nңɕ)ꎮ在连续管定向钻井纠偏过程中ꎬ为保证连续管钻井导向高效ꎬ定向器需按照最小能量原则进行纠偏[15-16]ꎮ最小能量原则是指按图5等分3个区域ꎬ令距离合位移矢量Ω最近的肋的分位移为0(此肋处于最不利位置)ꎬ然后可再根据方程组(7)得到另外2个分位移矢量解ꎮ例如ꎬ若合位移矢量Ω处于第Ⅱ区域时ꎬ定向器各肋分位移可表示为(Ω1ꎬ0ꎬΩ3)[17]ꎮ根据前文中得到的井眼轨道工具面角ω可得图5㊀定向器3肋最小能量原则区域划分方法Fig 5㊀Zonedivisionforthetripleribsoftheorientation㊀㊀toolfollowingtheminimumenergyprinciple92 2023年㊀第51卷㊀第2期邢志晟ꎬ等:连续管钻井肋式定向器执行机构偏置位移优化㊀㊀㊀定向器肋合位移矢量的方向ꎬ根据设计井眼轨道圆弧段圆心角θ可得连续管定向器肋合位移矢量的大小Ω=Γ(ΓɤΓmax)ꎬ故依据最小能量原则和方程组(7)ꎬ可得连续管钻井纠偏过程中定向器肋位移控制方案ꎮ当0ɤφ0<60ʎ时ꎬ计算式如下ꎮ(1)当300ʎɤ(ω-φ0)ɤ(360ʎ-φ0)或-φ0ɤ(ω-φ0)<60ʎ时ꎬ合位移矢量处于Ⅰ区域ꎬ其中(ω-φ0)为工具面角ω所在位置逆时针向1#肋转过的角度ꎬ此时根据最小能量原则ꎬ连续管定向器1#肋位移为0ꎬ根据方程组(7)可得:ΓcosωΓsinωæèçöø÷=cosφ0cosφ0+120ʎ()cosφ0+240ʎ()cosφ0sinφ0+120ʎ()sinφ0+240ʎ()æèçöø÷0Ω2Ω3æèçççöø÷÷÷(8)㊀㊀将式(4)~式(6)代入式(8)进行求解可得:Ω1Ω2Ω3æèçççöø÷÷÷=02㊀3sinω-φ0-60ʎ()-2㊀3sinω-φ0+60ʎ()æèççççççöø÷÷÷÷÷÷ˑM12sin180ʎ-2arccosπθM12360Læèçöø÷(9)㊀㊀(2)当60ʎɤ(ω-φ0)<180ʎ时ꎬ合位移矢量处于Ⅱ区域ꎬ具体如图5所示ꎬ此时连续管定向器2#肋的位移为0ꎬ于是根据方程组(7)可进行如下计算:ΓcosωΓsinωæèçöø÷=cosφ0cosφ0+120ʎ()cosφ0+240ʎ()cosφ0sinφ0+120ʎ()sinφ0+240ʎ()æèçöø÷Ω10Ω3æèçççöø÷÷÷(10)㊀㊀结合式(4)~式(6)对式(10)进行求解可得:Ω1Ω2Ω3æèçççöø÷÷÷=2㊀3sin60ʎ-ω-φ0()[]0-2㊀3sinω-φ0()æèççççççöø÷÷÷÷÷÷ˑM12sin180ʎ-2arccosπθM12360Læèçöø÷(11)㊀㊀(3)当180ʎɤ(ω-φ0)<300ʎ时ꎬ合位移矢量处于Ⅲ区域ꎬ具体如图5所示ꎬ此时连续管定向器3#肋的位移为0ꎬ于是根据方程组(7)可进行如下计算:ΓcosωΓsinωæèçöø÷=cosφ0cosφ0+120ʎ()cosφ0+240ʎ()cosφ0sinφ0+120ʎ()sinφ0+240ʎ()æèçöø÷Ω1Ω20æèçççöø÷÷÷(12)㊀㊀结合式(4)~式(6)ꎬ对式(12)进行求解可得:Ω1Ω2Ω3æèçççöø÷÷÷=2㊀3sin60ʎ+ω-φ0()-2㊀3sinω-φ0()0æèççççççöø÷÷÷÷÷÷ˑM12sin180ʎ-2arccosπθM12360Læèçöø÷(13)㊀㊀依据上述肋位移控制模型推导方法ꎬ得到1#肋的初始工具面角φ0在0ʎ~360ʎ范围内的肋位移控制方案如表1所示ꎮ表1 肋位移控制方案4㊀肋位移变化规律根据式(9)㊁式(11)和式(13)ꎬ可得连续管定向器各肋位移随工具面角变化规律ꎬ如图6所03 ㊀㊀㊀石㊀油㊀机㊀械2023年㊀第51卷㊀第2期示ꎮ由图6a~图6c可得到合位移Γ1=10mmꎻ由图6d~图6f可得到的合位移Γ2=15mmꎮ(1)以图6a为例ꎬ当固定1#肋工具面角为30ʎ时ꎬ在轨迹的工具面角[0ꎬ90ʎ]范围内ꎬ1#肋处于不利地位ꎬ1#肋位移为0ꎬ2#肋和3#肋均外伸ꎬ且随总工具面角增加ꎬ2#肋位移减小ꎬ3#肋位移先增加后减小ꎻ在总工具面角[90ʎꎬ210ʎ]范围内ꎬ2#肋处于不利地位ꎬ2#肋位移为0ꎬ1#肋和3#肋均外伸ꎬ且随总工具面角增加ꎬ2#肋位移先增加后减小ꎬ3#肋位移先减小后增加ꎻ在[210ʎꎬ330ʎ]范围内ꎬ3#肋处于不利地位ꎬ3#肋位移为0ꎬ1#肋和2#肋均外伸ꎬ且随总工具面角增加ꎬ1#肋位移先增加后减小ꎬ2#肋位移先减小后增加ꎻ在[330ʎꎬ360ʎ]范围内ꎬ1#肋处于不利地位ꎬ1#肋位移为0ꎬ2#肋和3#肋均外伸ꎬ且随总工具面角增加ꎬ2#肋位移增加ꎬ3#肋位移增加ꎮ(2)由图6a~图6c可知ꎬ若合位移Γ1为10mmꎬ单肋位移的最大幅值需为11 55mmꎻ从图6d~图6f可知ꎬ若合位移Γ2为15mmꎬ单肋位移的最大幅值需为17 32mmꎻ故单肋位移的幅值决定了合位移的大小ꎮ(3)由图6a㊁图6c㊁图6e可知ꎬ1#肋工具面角相隔120ʎ时ꎬ某些肋运动规律相同ꎮ例如ꎬ定向器1#肋工具面角分别为30ʎ㊁150ʎ㊁270ʎ时ꎬ[Ω1-30ʎꎬΩ3-150ʎꎬΩ2-270ʎ]位移运动规律相同ꎬ同样有[Ω2-30ʎꎬΩ1-150ʎꎬΩ3-270ʎ]㊁[Ω3-30ʎꎬΩ2-150ʎꎬΩ1-270ʎ]位移运动规律相同ꎮ(4)从图6f可知ꎬ在设计轨道工具面角240ʎ之后ꎬ连续管钻井进入斜直井段ꎬ不存在工具面角ꎬ连续管定向器为保持钻进模式ꎬ各肋位移相等ꎬ根据式(1)ꎬ|Ω1|=|Ω2|=|Ω3|=κdh-dorꎻ此时合位移大小为0ꎮ图6㊀定向器各肋位移随工具面角变化规律Fig 6㊀Displacementvs.toolfaceangleforeachriboftheorientationtool5㊀结㊀论(1)将连续管钻井肋式定向器偏置位移矢量控制简化为控制平面内位移矢量的合成与分解ꎬ指出分位移矢量求解时解的多样性ꎬ在三翼肋定向器实际工作过程中ꎬ使用就近原则和最小能量原则进行分位移矢量计算并实现钻井过程中的导向功能ꎬ建立了连续管钻井定向器导向过程中定向模式及保持模式的肋位移控制方案ꎮ(2)通过对单肋不同工具面位移矢量分析ꎬ单肋位移的幅值决定了合位移的大小ꎮ肋工具面角相隔120ʎ时ꎬ某些肋运动规律相同ꎻ连续管钻井进入斜直井段ꎬ不存在工具面角ꎬ连续管定向器为保持钻进模式ꎬ各肋位移相等ꎮ参㊀考㊀文㊀献[1]㊀贺会群ꎬ熊革ꎬ李梅ꎬ等.LZ580-73T连续管钻机的研制[J].石油机械ꎬ2012ꎬ40(11):1-4.HEHQꎬXIONGGꎬLIMꎬetal.Developmentofthe13 2023年㊀第51卷㊀第2期邢志晟ꎬ等:连续管钻井肋式定向器执行机构偏置位移优化㊀㊀㊀LZ580-73TCTdrillingrig[J].ChinaPetroleumMa ̄chineryꎬ2012ꎬ40(11):1-4.[2]㊀李猛ꎬ贺会群ꎬ辛永安ꎬ等.基于概率理论的连续管钻井调整工具面扭矩预测方法研究[J].长江大学学报(自科版)ꎬ2016ꎬ13(10):61-71.LIMꎬHEHQꎬXINYAꎬetal.TorquecalculationmethodforadjustingtoolfaceduringCTDbasedonprobabilitytheory[J].JournalofYangtzeUniversity(NaturalScienceEdition)ꎬ2016ꎬ13(10):61-71. [3]㊀贺会群ꎬ熊革ꎬ刘寿军ꎬ等.我国连续管钻井技术的十年攻关与实践[J].石油机械ꎬ2019ꎬ47(7):1-8.HEHQꎬXIONGGꎬLIUSJꎬetal.TenyearsofkeyproblemstacklingandpracticeofcoiledtubingdrillingtechnologyinChina[J].ChinaPetroleumMachineryꎬ2019ꎬ47(7):1-8.[4]㊀LIMꎬSUKHꎬWANLF.Uncertaintyanalysisforhydrauliccylinderpressurecalculationoforienterincoiledtubingdrilling[J].JournalofEngineeringRe ̄searchꎬ2019ꎬ7(1):1-16.[5]㊀KRUEGERSꎬPRIDATL.Twentyyearsofsuccessfulcoiledtubingre ̄entrydrillingwithe ̄lineBHAsystems ̄improvingefficiencyandeconomicsinmaturingfieldsworldwide[C]ʊSPE/ICoTACoiledTubingandWellInterventionConferenceandExhibition.HoustonꎬTex ̄asꎬUSA:SPEꎬ2016:SPE179046-MS. [6]㊀SCHULZE ̄RIEGERTRꎬBAGHERIMꎬKROSCHEM.Multiple ̄objectiveoptimizationappliedtowellpathde ̄signundergeologicaluncertainty[C]ʊSPEReservoirSimulationSymposium.TheWoodlandsꎬTexasꎬUSA:SPEꎬ2011:SPE141712-MS.[7]㊀MATHEUSJꎬNAGANATHANS.Drillingautomation:noveltrajectorycontrolalgorithmsforRSS[C]ʊIADC/SPEDrillingConferenceandExhibition.NewOrleansꎬLouisianaꎬUSA:SPEꎬ2010:SPE127925-MS. [8]㊀VLEMMIXSꎬJOOSTENGJPꎬBROUWERDRꎬetal.Adjoint ̄basedwelltrajectoryoptimizationinathinoilrim[C]ʊEUROPEC/EAGEConferenceandExhi ̄bition.AmsterdamꎬTheNetherlands:SPEꎬ2009:SPE121891-MS.[9]㊀HIMMELBERGNꎬECKERTA.Wellboretrajectoryplanningforcomplexstressstates[C]ʊ47thU.S.RockMechanics/GeomechanicsSymposium.SanFran ̄ciscoꎬCalifornia:ARMAꎬ2013:ARMA2013-316. [10]㊀冯定ꎬ王鹏ꎬ张红ꎬ等.旋转导向工具研究现状及发展趋势[J].石油机械ꎬ2021ꎬ49(7):8-15.FENGDꎬWANGPꎬZHANGHꎬetal.Researchstatusanddevelopmenttrendofrotarysteerablesystemtool[J].ChinaPetroleumMachineryꎬ2021ꎬ49(7):8-15.[11]㊀赵金洲ꎬ孙铭新.旋转导向钻井系统的工作方式分析[J].石油机械ꎬ2004ꎬ32(6):73-75.ZHAOJZꎬSUNMX.Workingmodeanalysisofrota ̄rysteerablesystem[J].ChinaPetroleumMachineryꎬ2004ꎬ32(6):73-75.[12]㊀LICNꎬSAMUELR.BucklingofconcentricstringPipe ̄in ̄Pipe[C]ʊSPEAnnualTechnicalConferenceandExhibition.SanAntonio.TexasꎬUSA:SPE187455-MS.[13]㊀BOONSRIK.Torquesimulationinthewellplanningprocess[C]ʊIADC/SPEAsiaPacificDrillingTech ̄nologyConference.BangkokꎬThailand:IADC/SPEꎬ2014:SPE170500-MS.[14]㊀胡亮ꎬ高德利.连续管钻定向井工具面角调整方法研究[J].石油钻探技术ꎬ2015ꎬ43(2):50-53.HULꎬGAODL.StudyonamethodforToolfacere ̄orientationwithcoiledtubingdrilling[J].PetroleumDrillingTechniquesꎬ2015ꎬ43(2):50-53. [15]㊀李猛ꎬ贺会群ꎬ辛永安ꎬ等.连续管钻井电液定向装置工具面调整方法[J].石油钻探技术ꎬ2016ꎬ44(6):48-54.LIMꎬHEHQꎬXINYAꎬetal.Toolfaceorienta ̄tionbyusinganelectric ̄hydraulicorienterduringcoiledtubingdrilling[J].PetroleumDrillingTech ̄niquesꎬ2016ꎬ44(6):48-54.[16]㊀李猛ꎬ贺会群ꎬ张云飞.连续管钻井电液定向器工具面角度调整分析[J].石油机械ꎬ2016ꎬ44(5):1-7.LIMꎬHEHQꎬZHANGYF.Analysisonelectro ̄hydraulicorientationtoolfaceangleadjustmentforcoiledtubingdirectionaldrilling[J].ChinaPetroleumMachineryꎬ2016ꎬ44(5):1-7.[17]㊀程载斌ꎬ姜伟ꎬ蒋世全ꎬ等.旋转导向系统三翼肋偏置位移矢量控制方案[J].石油学报ꎬ2010ꎬ31(4):676-679ꎬ683.CHENGZBꎬJIANGWꎬJIANGSQꎬetal.Controlschemefordisplacementvectorofthree ̄padbiasingro ̄tarysteerablesystem[J].ActaPetroleiSinicaꎬ2010ꎬ31(4):676-679ꎬ683.㊀㊀第一作者简介:邢志晟ꎬ生于2000年ꎬ中国石油大学(北京)在读硕士研究生ꎬ研究方向为石油与天然气工程ꎮ通信作者:李猛ꎬE ̄mail:limengti06@126 comꎮ㊀收稿日期:2022-08-17(本文编辑㊀南丽华)23 ㊀㊀㊀石㊀油㊀机㊀械2023年㊀第51卷㊀第2期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[收稿日期]20050920 [作者简介]刘夏荣(1968),男,1991年大学毕业,高级工程师,硕士生,现主要从事钻井工程方面的研究与管理工作。
连续导向钻具组合三维准动力学分析模型及其导向力变化规律 刘夏荣 长江大学地球科学学院,湖北荆州434023塔里木油田分公司外事与装备处,新疆库尔勒841000 王新海 (长江大学地球科学学院,湖北荆州434023) 唐 艳 (濮阳市双发实业有限责任公司,河南,濮阳457001) 张建成 (新疆石油管理局机械制造总公司,新疆克拉玛依834000)[摘要]对于连续导向钻具组合来说,由于其弯螺杆的存在,使得其在任何一个瞬态的受力变形都有其独特的特征。
连续导向钻具组合旋转钻井时其特点可以归纳为一个工具面不断有规律改变的过程,其总体导向效果可以用钻柱旋转一周内的钻头上的合侧向力矢量来表述。
[关键词]钻具组合;连续导向;动力学分析模型;导向力[中图分类号]T E921.2[文献标识码]A [文章编号]10009752(2006)01013202对于连续导向钻具组合来说,由于其弯螺杆的存在,使得其在任何一个瞬态的受力变形都有其独特的特征[1~4]。
这个特征主要来源于螺杆的弯曲面。
在滑动导向钻具组合连续导向钻井技术中,这个弯曲面就是导向工具面,这里定义为工具面,其相对于井眼高边的夹角(从高边顺时针计)定义为工具面角。
这样,连续导向钻具组合旋转钻井时其特点可以归纳为一个工具面不断有规律改变的过程,其总体导向效果可以用钻柱旋转一周内的钻头上的合侧向力矢量来表述[5~7]。
1 准动力学模型设连续导向钻具组合在某一时刻的工具面角为ω,在这一工具面角位置可计算出钻头上的造斜力为F α(ω),方位力为F (ω)。
取钻具组合旋转一周为研究对象,ω的取值范围为0~2π,均匀取值。
设计算点数为n ,则工具面角变化步长为Δω=2π/n 。
计算点数应大于或等于36。
钻具组合旋转一周内在钻头上作用的导向合力F s 为: F s =1nF 2s α+F 2s(1)式中,F s α为合造斜力,F s α=∑2πω=0Fα(ω),kN ;F s 为合方位力,F s =∑2πω=0F(ω),kN ;F α(ω)和F (ω)由静力学模型求解。
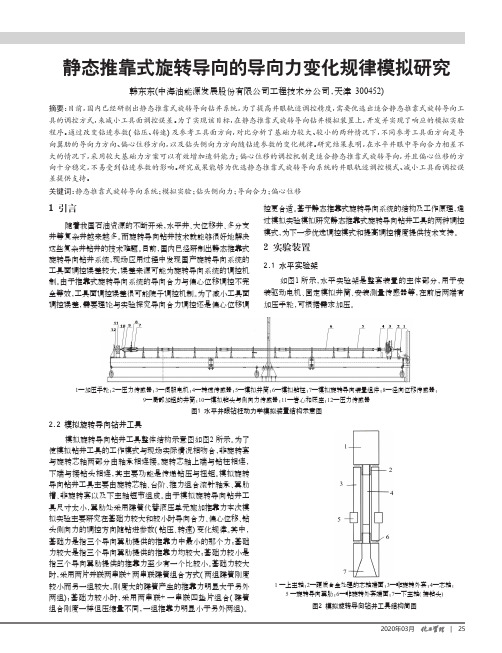
导向合力方向角(导向合力与高边的夹角)为: αs =arctan (F s /F s α)(2)2 主要参数对连续导向钻具组合复合钻井导向力的影响规律钻具组合为:215.9PDC 钻头+稳定器+单弯螺杆+165DC +214m m 稳定器+165DC (81m )+127DP 。
近钻头稳定器与钻头的距离为L 1=1.2m ;弯点与近钻头稳定器中部的距离为1.2m 。
2.1 井斜角的影响计算条件为:钻压60kN ,转盘转速60r /min ,钻井液密度1.02g /cm 3,稳定器间距L 2=20m ,弯132 石油天然气学报(江汉石油学院学报) 2006年2月 第28卷 第1期Jo urnal of Oil and Gas Technology (J .JP I ) Feb.2006 Vol .28 No .1表1 稳定器偏心为1mm 时不同井斜角情况下的导向力大小α/(°)1216203045F s /kN3.134.596.028.7710.61角大小0.75°,井斜角12°。
利用SABH A 计算软件,可以计算出稳定器偏心为1mm 时的导向力及其方向角,结果见图1和表1。
导向力方向指向井眼高边方向。
图1 带双稳定器的连续导向钻具组合同样可以求得稳定器偏心为2mm 时不同井斜角情况下的导向力,结果见表2。
导向力方向指向井眼高边方向。
计算结果表明,随着井斜角增加,导向合力增加;近钻头稳定器偏心距增加,导向合力减小,可见井径扩大或稳定器外径磨损,都将迅速降低这种钻具组合的导向能力。
2.2 不同钻压时的导向合力仿真结果利用SABH A 软件,可以求得不同钻压时的导向合力,结果见表3(稳定器偏心为2mm ,α=45°,L 2=20m )。
导向力方向指向井眼高边方向。
结果表明,钻压增加,导向力微增,可见在正常钻压范围内,钻压影响不大。
2.3 螺杆弯角的影响同样,可以计算得到螺杆弯角对导向力的影响,见表4。
计算条件为:稳定器偏心1mm ,α=20m m ,W =60kN ,L 2=20m 。
表2 稳定器偏心为2mm 时不同井斜角情况下的导向力大小α/(°)1216203045F s /kN1.953.364.597.238.96从计算结果可以看出,尽管在某一特定的工具面角条件下(某一瞬态),钻头上的侧向力随弯角的增加而增加,但在转盘旋转一周内钻头作用在井壁上的导向合力随弯角的增加出现减小的趋势。
表3 不同钻压时的导向合力仿真结果W /kN 406080F s /k N8.858.969.07表4 不同螺杆弯角时的导向合力仿真结果弯角/(°)0.7511.251.5F s /k N6.024.693.611.37[参考文献][1]狄勤丰.滑动式导向钻具组合复合钻井时导向力计算分析[J ].石油钻采工艺,2000,22(1):14~16.[2]季细星,苏义脑.新型钻直井的钻具组合及油田试验结果分析[J ].石油钻采工艺,1996,18(1):32~33.[3]Jan sen J D .Non -Linear roto r dy namics as applied to oilw ell d rilling string vibrations [J ].J ournal of Sound and Vibration ,1991,147(1):115~135.[4]Rischmuller H ,Hoffers B ,Woh lgemu th L .Advanced drilling tech nology for the continental deep d rilling p rog ram (KTB ):Part ofIn ternational Lithosph ere Research [J ].SPE 22576,1991.[5]S chellenberg S ,Rogers T ,Smith L .Deviation con trol w ith steerab le sys tem lowers w ell costs in s ou thern Oklahoma [J ].SPE22567,1991.[6]Jan sen J D .W hirl an d chaotic motion of stabilized drill collars [J ].SPE 20930,1992.[7]Calderoni A ,S avini A ,Treviranu s J ,Oppelt J .Outstanding economic advantages bas ed on new straig ht -hole d rilling device proven invarious oilfield locations [J ].SPE 56444,1999.[编辑] 苏开科133 第28卷第1期刘夏荣等:连续导向钻具组合三维准动力学分析模型及其导向力变化规律 oil.In co nventional dem ulsifier used in the field,dew atering in crude oil is slow,w ate r content o f crude oil and oil content in sew age after dew atering are hig h,w hich can no t meet the requirem ents of electric dew ate ring.On the basis of studying the conditions and mechanism o f emulsio n formed in po lymer displacement,JH W anodic demulsifier is developed by laboratory sy nthesis.Field test indi-cates that its dew atering is fast.Oil content in sew age is low,under the conditio n that JH W is half as conventional dem ulsifier,it can still meet the requirements o f chemical dew ate ring fo r field po ly-mer displacement.Key words:poly mer displacem ent;demulsifier;w ater content of crude oil;w ater co ntent o f sew age123Evaluation on Temperature Tolerance and Salt-resisting Properties of A Novel Polymer LH-3500Used in Gudao S ewage WaterXIAO Jian-hong (S hen gli Oilf ield Co.Ltd,S INOP EC,Dong ying257231;Ch ina Univesity o f Petro leum,Beijing102249) WAN G Tao (S heng li Oilf ield Co.Ltd.,Dong ying257231;China University o f P etroleum,Dong yin g257061)SON G Dai-feng,CHEN H ui (S heng li Oil f ield Co.Ltd.,S I NOPE C,Dong yin g257231)Abstract:A n evaluation is co nducted o n temperature tolerance and salt-resisting proper ties of a novel poly mer LH-3500and o ptimal poly mers available in sew age wa ter in Gudao and the o ther oilfields.It is found in the evaluation that structural o ptimized LH-3500has optimal evaluation results o f sol-ubility,temperature tolerance and salt resistance and dilutio n resistance,the consistency o f LH-3500w ith1500mg/L concentration is co nsistent w ith those of field injected polym er A and B w ith concentration of2300m g/L,sew age can be used to prepare it,of w hich the usage of po lymer can be greatly reduced,g reat econo mic result and enviro nmental efficiency w ould be obtained as it is intro-duced in Gudao Oilfield.Key words:po lymer;temperature to lerance;salt re sistance;consistency132Model for3D Quasi-dynamic Analysis and Rules of Its Steering Changes of A Continuous Steering Drill Tool AssemblyLIU Xia-rong (Yan gtze University,J in gz hou434023;Tarim Oilf ield Branch C omp any,CNP C,K orla841000)WANG Xin-hai (Yang tze University,J ing z hou434023)Abstract:For a continuous steering drill to ol assem bly,because there is crew in it,any transient fo rced deforma tion has its special characters.As it is used fo r drilling its characte rs include co ntinu-ous changes on tool face.Its to tal steering effect is that the pipe string ro tates one cycle indicates the vecto rs o f side fo rce o ne the drill bit.Key words:drill too l assembly;co ntinuous steering;m odel fo r dy namic analy sis;steering force134On S ustainable Development Strategy of Petroleum EnterprisesZH AN G Jin-l iang (Ch ina Univer sity o f Petro leum,Beijing102249;Zhon gy uan Oilf ield Branch C om pany,S I NOPEC,P uy-ang457001)YAN G Xian-gui (Yang tz e University,J ing zhou434023)LON G Xiao-ping (Zhon gy uan Oilf ield Branch Comp any,S INOP EC,Pu yang457001)Abstract:Petroleum industry is the support industry in China,if the sustainable developm ent w ould be realized,it is related to the national eco nom y and people's liveliho od.The m ain pro blem s at pres-ent existed in petro leum ente rprises are analyzed.In co mbinatio n w ith the development strategies used in international oil co rpo rations in the west,the sustainable development strategies fo r China's oil ente rprises are discussed fo r the purposes of expanding and development of the ente rprises under the environment of internatio nal competition for oil resources.Key words:petroleum enterprise;sustainable develo pment;co mpetitio n for oil resource;competi-tio n abilityTranslated&Edited by SU Kai-ke(苏开科)。