基于熵的图像二值化算法设计-二维最大熵分割
二维最大熵

二维最大熵二维最大熵是一种基于最大熵原理的图像分割方法,它利用了图像的灰度信息和邻域的空间相关信息,通过构造二维直方图来选择最佳的分割阈值。
二维最大熵不仅反映了灰度分布信息,还反映了邻域平均灰度信息,因此在图像信噪比较低时,二维最大熵法明显优于一维最大熵法。
最大熵原理最大熵原理是统计学习的一般原理,它指出,当我们需要对一个随机事件的概率分布进行预测时,我们的预测应当满足全部已知的条件,而对未知的情况不要做任何主观假设。
换句话说,我们应该选择使得信息熵最大的概率分布作为最优的预测模型。
信息熵是一种衡量随机变量不确定性的度量,它定义为:H(X)=−∑xP(x)log P(x)其中X是一个离散随机变量,P(x)是X取值为x的概率。
信息熵越大,表示X的不确定性越大。
按照最大熵原理,我们应该选择使得H(X)最大的概率分布P(x)作为最优模型。
当然,在选择模型时,还要满足一些已知的约束条件,例如期望值、方差等。
这样,我们就可以将最大熵模型转化为一个约束优化问题,利用拉格朗日乘子法或者其他优化算法求解。
二维直方图二维直方图是一种描述图像中两个相关变量之间分布关系的直方图。
在二维最大熵方法中,我们通常使用点灰度和区域灰度均值作为两个相关变量。
点灰度指的是图像中每个像素的灰度值,区域灰度均值指的是每个像素邻域内(例如3×3或5×5)所有像素灰度值的平均值。
这样,每个像素都对应一个点灰度-区域灰度均值对(f(x,y),g(x,y)),其中f(x,y)是点灰度,g(x,y)是区域灰度均值。
如果图像有L个灰度级(例如L=256),那么这样的数据对有L×L种可能的取值。
设n ij为图像中点灰度为i及其区域灰度均值为j的像素点数,p ij为点灰度-区域灰度均值对(i,j)发生的概率,则p ij=n ij N×N其中N×N是图像的总像素数。
则{p ij,i,j=0,1,…,L−1}就是该图像关于点灰度-区域灰度均值的二维直方图。
二维最大熵阈值分割法
二维最大熵阈值分割算法[引用]杜峰,施文康,邓勇等:《一种快速红外图像分割方法》1. 二维最大熵阈值分割熵是平均信息量的表征。
二维最大熵法是基于图像二维直方图。
图像二维直方图定义如下:NM n P j i j i ⨯=,,其中N M ⨯表示图像大小,j i n ,表示图像灰度值为i ,邻域灰度平均值为j 的像素个数。
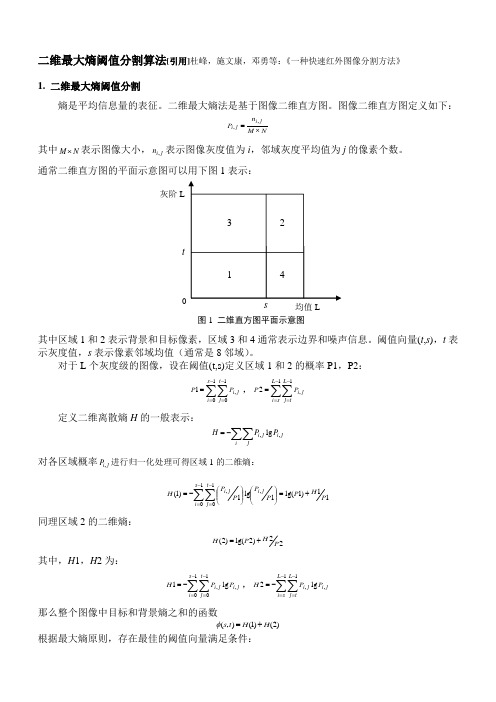
通常二维直方图的平面示意图可以用下图1表示:其中区域1和2表示背景和目标像素,区域3和4通常表示边界和噪声信息。
阈值向量(t ,s ),t 表示灰度值,s 表示像素邻域均值(通常是8邻域)。
对于L 个灰度级的图像,设在阈值(t,s)定义区域1和2的概率P1,P2:∑∑-=-==101,1s i t j ji PP ,∑∑-=-==11,2L s i L tj j i P P定义二维离散熵H 的一般表示:∑∑-=ijji ji P PH ,,lg对各区域概率j i P ,进行归一化处理可得区域1的二维熵:11)1lg(1lg 1)1(101,,P H P P P P P H s i t j j i ji +=⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=∑∑-=-= 同理区域2的二维熵:22)2lg()2(P H P H +=其中,H 1,H 2为:∑∑-=-=-=101,,lg 1s i t j ji ji P PH ,∑∑-=-=-=11,,lg 2L s i L tj j i j i P P H那么整个图像中目标和背景熵之和的函数)2()1(),(H H t s +=φ根据最大熵原则,存在最佳的阈值向量满足条件:图1 二维直方图平面示意图灰阶)},(max{),(t s t s φφ=**图2显示了一幅图像的二维直方图说明了背景和目标的主要分布情况,其中图2(b)横坐标表示邻域的均值,纵坐标表示灰度值分布:2. 微粒群寻优算法(PSO )PSO 最早由Kenredy 和Eberhart 于1995年提出。
基于QPSO的二维模糊最大熵图像阈值分割方法
基于QPSO的二维模糊最大熵图像阈值分割方法
田杰;曾建潮
【期刊名称】《计算机工程》
【年(卷),期】2009(35)3
【摘要】针对运用图像分割方法求取阈值时存在的计算复杂、时间长、实用性差等问题,提出一种新的二维最大熵图像分割方法,该方法利用基于量子行为的微粒群算法对图像的二维阈值空间进行全局搜索,并将搜索到的二维熵最大值所对应的点灰度-区域灰度均值作为阈值进行图像分割.实验结果表明,该方法具有一定优越性,在执行时间与收敛性方面均得到较理想的分割效果.
【总页数】3页(P230-232)
【作者】田杰;曾建潮
【作者单位】太原科技大学系统仿真与计算机应用研究所,太原,030024;太原科技大学系统仿真与计算机应用研究所,太原,030024
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种基于二维最大熵的SAR图像自适应阈值分割算法 [J], 张红蕾;宋建社;翟晓颖
2.基于Sobel算子的图像快速二维最大熵阈值分割算法 [J], 李锋;阚建霞
3.基于二维最大熵阈值分割的坑识别方法 [J], 郭烈;王荣本;金立生;余天洪;顾柏园
4.基于二维最大熵原理和改进遗传算法的图像阈值分割 [J], 李宏言;盛利元;陈良款;
李更强
5.一种结合小波变换与二维最大熵法的图像阈值分割方法 [J], 刘耀辉;鲍苏苏因版权原因,仅展示原文概要,查看原文内容请购买。
基于二维模糊熵和遗传算法的图像阈值分割
t e ie h e c it n o ma e S fz y e t p . h rc d r o i ig t e o t lc mb n t n o u z a a t r h n gv s t e d s r i f i g u z nr yT e p o e u e f r f d n h p i o iai f f z y p rmee s po o n ma o i i l n e b i l g n t lo i m a d mp o e d p i e ei lo i m. ial, e o t l h e h l s d t r s mpe me t d y s mpe e ei a g rh c t n i rv d a a t e g n t ag rh Fn l t p i r s od i e e — v c t yh ma t
1 基 于 二 维 最大 模 糊 熵 的 图 像 分割 算 法
P = ( ) 肋c
P肋 % ) 。 互 ( =
() s —主 ,
(f s) ’—
( ・ rco s 0 EB k o
( , BIc s D E c ka —  ̄
( 6 )
( 7 )
( , 分 别 采 用 式 () st ) 3
在 图像 处 理 中 , 图像 像 素 灰 度具 有 一 定 的模 糊 性 ,边 缘 、 边 界、 区域 等 的定 义具 有模 糊 性 。因此 , 糊理 论 可 以应 用 于 图像分 模
割 …。而 遗传 算 法 是 一 种 模拟 生 物 自然选 择 、 化 过程 的随 机 、 进 并 行 搜 索 算 法 , 它 应 用 于 图象 分 割 中 , 以 提 高 图像 分 割 的计 将 可 算 效 率和 分 割 质量 。本 文将 模 糊 理论 和 遗 传算 法 相 结合 , 二维 对
二维最大熵阈值分割
二维最大熵阈值分割
二维最大熵阈值分割算法
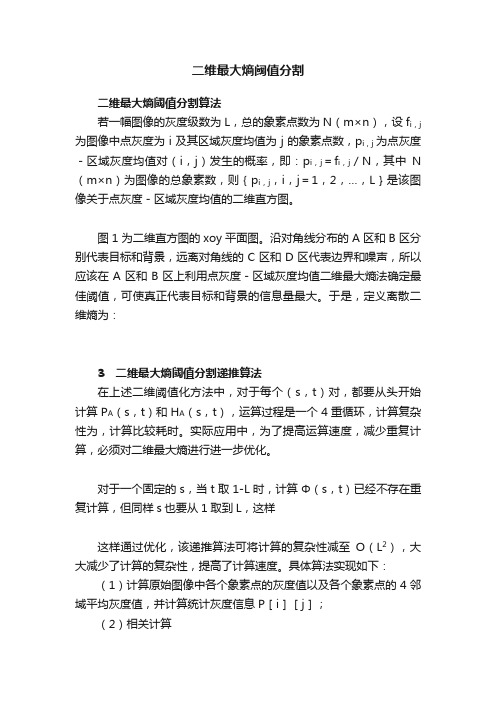
若一幅图像的灰度级数为L,总的象素点数为N(m×n),设f i,j 为图像中点灰度为i及其区域灰度均值为j的象素点数,p i,j为点灰度-区域灰度均值对(i,j)发生的概率,即:p i,j=f i,j/N,其中N (m×n)为图像的总象素数,则{p i,j,i,j=1,2,…,L}是该图像关于点灰度-区域灰度均值的二维直方图。
图1为二维直方图的xoy平面图。
沿对角线分布的A区和B区分别代表目标和背景,远离对角线的C区和D区代表边界和噪声,所以应该在A区和B区上利用点灰度-区域灰度均值二维最大熵法确定最佳阈值,可使真正代表目标和背景的信息量最大。
于是,定义离散二维熵为:
3 二维最大熵阈值分割递推算法
在上述二维阈值化方法中,对于每个(s,t)对,都要从头开始计算P A(s,t)和H A(s,t),运算过程是一个4重循环,计算复杂性为,计算比较耗时。
实际应用中,为了提高运算速度,减少重复计算,必须对二维最大熵进行进一步优化。
对于一个固定的s,当t取1-L时,计算Φ(s,t)已经不存在重复计算,但同样s也要从1取到L,这样
这样通过优化,该递推算法可将计算的复杂性减至O(L2),大大减少了计算的复杂性,提高了计算速度。
具体算法实现如下:(1)计算原始图像中各个象素点的灰度值以及各个象素点的4邻域平均灰度值,并计算统计灰度信息P[i][j];
(2)相关计算
(3)求出最佳阈值(s*,t*),分割图像。
二维直方图区域斜分的最大熵阈值分割算法
维直方图区域划分成图 1 ( c) 所示的 4个矩形区域.
假设图像的暗 (亮 ) 像素属于目标 (背景 ) , 则区域 0
和目标对应 ,区域 1和背景对应 ,而区域 2和 3则表
示边缘和噪声. 计算时仅考虑区域 0和 1, 而假设区
域 2和 3的概率近似为零. 最后采用与灰度级轴垂直
的直线将灰度级小于 t的部分分成目标 ,大于 t的则
A BSTRAC T
The obvious w rong segmentation is pointed out in the existing two2dimensional histogram vertical segm entation method. A two2dimensional histogram oblique segm entation method is p roposed. Then the formula and its fast recursive algorithm of the maximum Shannon entropy thresholding are deduced based on the two2dim ensional histogram oblique segm entation. Finally, the threshold images and the p rocessing tim e are given in the experimental results and analysis. The results are compared w ith those of the original m axim um Shannon entropy algorithm and its fast algorithm s based on the two2dim ensional histogram vertical segmentation. The experimental results show that the p roposed method makes the inner part uniform and the edge accurate in the threshold image, and it has a better anti2noise p roperty. The p rocessing tim e of the fast recursive algorithm of the p roposed method is about 2% of that of the original two2dim ensional maximum Shannon entropy algorithm , and it is less than one third of that of two fast recursive algorithm s of the maximum Shannon entropy thresholding based on the two2dim ensional histogram vertical segmentation.
图像二值化_最大熵_信息论
//update max entropy
h_max = h;
//update best threshold
threshold = i;
}
}
return threshold;
}
说明:以上只是项目算法JAVA代码实现代码中比较核心的部分,完整的可运行程序请查看附件中的JAVA代码包。
//high range entropy
double hh = 0;
if (ch>0) {
for (int j = i+1; j < 256; j++) {
if (nh[j]>0) {
hh = hh - (nh[j]/ch)*Math.log(nh[j]/ch);
}
}
}
double h = hl+hh;
信息论的其中一个应用领域是数字图像处理。数字图像处理中的一个很重要的研究方向是图像的二值分割。图像的二值分割在计算机图像处理技术中的应用非常广泛,可以应用于目标识别、图像分析、文本增强、字符识别、牌照识别等各种应用领域,因此对其进行深入研究具有很重要的实际意义。图像的二值分割就是把一幅图像分成目标和背景两大类,传统的二值分割方法主要是根据目标和背景的灰度分布差异选取适当的阈值进行分割,因此如何来选取阈值是图像分割的关键问题。本文结合信息论中的基本知识,通过运用信息论中的方法,就图像领域的二值分割问题,来一瞥信息论的惊鸿之美。
//cumulative distribution
double[] cd = cumulative(nh);
for (int i = 0; i < 256; i++) {
二维最大熵阈值分割法
%%%%%%%%%%%%%%%%%%% 二维最大熵阈值分割法%%%%%%%%%%%%%%%%%%[filename,pathname]=uigetfile;img=imread(strcat(pathname,filename));figure(1);subplot(221);imshow(img);subplot(222);imhist(img(:,1));subplot(223);imhist(img(:,2));subplot(224);imhist(img(:,3));%%%%%%%%%%%%% 这个地方出现了一个问题就是为什么MidValue=img(i,j-1,1)+img(i-1,j,1)+img(i%%%%%%%%%%%%% +1,j,1)+img(i,j+1,1)最大值为256,难道是默认的一个BYTE类型吗???p=zeros(256,256);[m,n,k]=size(img);for i=2:m-1for j=2:n-1MidValue=img(i,j-1,1)/4+img(i-1,j,1)/4+img(i+1,j,1)/4+img(i,j+1,1)/4;MidValue=round(MidValue);p(img(i,j,1)+1,MidValue+1)=p(img(i,j,1)+1,MidValue+1)+1;end;end;%图像的四个角,只有2领域的点儿p(img(1,1,1)+1,round((img(1,2,1)/2+img(2,1,1)/2))+1)=p(img(1,1,1)+1,round((img(1,2,1)/2+img( 2,1,1)/2))+1)+1;p(img(1,n,1)+1,round((img(1,n-1,1)/2+img(2,n,1)/2))+1)=p(img(1,n,1)+1,round((img(1,n-1,1)/2+i mg(2,n,1)/2))+1)+1;p(img(m,1,1)+1,round((img(m-1,1,1)/2+img(m,2,1)/2))+1)=p(img(m,1,1)+1,round((img(m-1,1,1)/ 2+img(m,2,1)/2))+1)+1;p(img(m,n,1)+1,round((img(m,n-1,1)/2+img(m-1,n,1)/2))+1)=p(img(m,n,1)+1,round((img(m,n-1, 1)/2+img(m-1,n,1)/2))+1)+1;%图像周围的一圈,只有3领域的点儿for j=2:n-1MidValue=img(1,j-1,1)/3+img(1,j+1,1)/3+img(2,j,1)/3;MidValue=round(MidV alue);p(img(1,j,1)+1,MidValue+1)= p(img(1,j,1)+1,MidV alue+1,1)+1;end;for j=2:n-1MidValue=img(m,j-1,1)/3+img(m,j+1,1)/3+img(m-1,j,1)/3;MidValue=round(MidV alue);p(img(m,j,1)+1,MidValue+1)= p(img(m,j,1)+1,MidValue+1)+1;end;for i=2:m-1MidValue=img(i-1,1,1)/3+img(i+1,1,1)/3+img(i,2,1)/3;MidValue=round(MidV alue);p(img(i,1,1)+1,MidValue+1)= p(img(i,1,1)+1,MidV alue+1)+1;end;for i=2:m-1MidValue=img(i-1,n,1)/3+img(i+1,n,1)/3+img(i,n-1,1)/3;MidValue=round(MidV alue);p(img(i,n,1)+1,MidValue+1)= p(img(i,n,1)+1,MidValue+1)+1;end;p=p/(m*n);%%%%%%%%%%%% 忽略噪音的影响%%%%%%%%%%%%%%%%%%%%%%%%%%%pa=0;ha=0;hn=0;s=10;t=10;Qst=0;temp_t=10;temp_s=10;for i=1:256for j=1:256if(p(i,j)>0)hn=hn+log2(p(i,j))*p(i,j)*(-1);end;end;end;for t=10:256for s=10:256ha=0;pa=0;for i=1:tfor j=1:spa=pa+p(i,j);end;end;for i=1:tfor j=1:sif(p(i,j)>0)ha=ha+log2(p(i,j))*p(i,j)*(-1);end;end;end;if(pa>0&&1-pa>0)if(log2(pa*(1-pa))+ha/pa+(hn-ha)/(1-pa)>Qst)Qst=log2(pa*(1-pa))+ha/pa+(hn-ha)/(1-pa);temp_t=t;temp_s=s;end;end;end;end;for i=1:mfor j=1:nif(img(i,j,1)>temp_s)img(i,j,1)=255;img(i,j,2)=255;img(i,j,3)=255;elseimg(i,j,1)=0;img(i,j,2)=0;img(i,j,3)=0;end;end;end;figure(2);imshow(img);。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1设计目的与要求1.1 设计目的(1)熟悉和掌握MATLAB程序设计方法。
(2)学习和掌握MATLAB图像处理工具箱。
(2)了解图像分割和图像二值化的原理。
(3)掌握图像二值化技术阈值的选取。
(4)将原彩色图像变为二值化后的图像,通过二维最大熵图像分割法对图像进行分割达到预期目的。
1.2 设计要求(1)了解图像变换的意义和手段。
(2)熟悉最大熵和二值化的基本性质。
(3)通过本实验掌握利用MATLAB编程实现数字图像处理。
(4)理解图像分割的原理,了解其应用,掌握最大熵和二值化分割的方法。
2 设计方案2.1 图像二值化图像二值化是数字图像处理技术中的一项基本技术,二值化图像的显示与打印十分方便,存储与传输也非常容易,在目标识别、图像分析、文本增强、字符识别等领域得到广泛应用。
图像二值化是将灰度图像转化为只有黑白两类像素的图像,大多采用阈值化算法处理。
在不同的应用中,阈值的选取决定着图像特。
征信息的保留。
因此,图像二值化技术的关键在于如何选取阈值。
2.2 最大熵原理最大熵原理:最大熵原理是在1957 年由E.T.Jaynes 提出的,其主要思想是,在只掌握关于未知分布的部分知识时,应该选取符合这些知识但熵值最大的概率分布。
因为在这种情况下,符合已知知识的概率分布可能不止一个。
我们知道,熵定义的实际上是一个随机变量的不确定性,熵最大的时候,说明随机变量最不确定,换句话说,也就是随机变量最随机,对其行为做准确预测最困难。
图像分割中最大熵的引入:在图像分割中若假定以灰度级T 分割图像,则图像中低于灰度级T 的像素点构成目标物体,高于灰度级T 的像素点构成背景那么各个灰度级在图像分割后的两区域中的概率如下:O :ti N N (0<=i<=t) (3.2.1)B :ti N N N - (t+1<=i<=255) (3.2.2)其中Ni 为图像中灰度级为i 的像素点个数,Nt 为灰度级从0~t 的像素点总和,N 为图像总像素点,t 为假定灰度阈值T 。
)l og()(tit i N N N N H ∑-= (0<=i<=t) (3.2.3) )log()(tit i B N N N N N N H ---=∑ (t+1<=i<=255) (3.2.4)令 H=HB+Ho .则根据最大信息熵理论在已知条件下要对图像做出分割的最佳决策即为最接近实际图像分割的理想决策。
2.3 图像分割的研究背景在一幅目标图像下,人们往往只是关注其中的一个或者几个目标,而这些目标必然会占据一定的区域,并且与周围其他目标或背景在一些特征上会有相应的差别。
但是,很多时候这些差别会非常的细微,以至于人眼很难发觉,这就需要用一定的技术对图片做一些处理。
而计算机图像处理技术的发展,很好地解决了这一难题,使得人们可以利用计算机技术来协助理这些信息,例如指纹识别、车牌识别以及医学影像的鉴别操作等方向。
图像分割是图像识别的基础,其通过一些必要的算法把图像中有意义的部分或特征提取出来,将图像分为若干有意义的区域,并形成数字特征,这些区域对应图像中的不同目标。
这些具有某种特征的单元成为图像的基元,这种经过处理的基元更容易被快速处理。
目前,数以千计的研究文献和文章提出了许许多多的图像分割算法,不同种类的图像、不同的应用要求和应用领域所需要提取出的图像特征是不相同的,所以并不存在普遍适用的最优方法,只能根据图像特征选择与值相适应的方法。
2.4 图像分割的基本原理图像分割是根据图像的直方图和结构特性或者一些具体的应用需求将图像划分成两个或多个互不相交的子区域的过程,这些子区域是在特定意义下的具有相同属性的像素的连通集合。
例如,一幅图像中不同目标物体所占的图像区域、背景所占的背景区域等都属于这样的连通集合概念。
对图像分割的定义有多种不同的解释,人们普遍接受的是通过集合定义的图像分割。
用集合R 表示整个图像区域,那么对整个图像的分割可以等价于将集合R 分成n 个满足以下准则的区域:;R R R R R n =Y Y Y Y (321)是相连的;R 时,n ,,3,2,1i 当i ⋯=∀i,;,有,对Φ=≠∀j i R R j i j i I=≠∀)(,有,对j i R R P j i j i Y false ;n true。
2,=i对31,R=),(P,,⋯i目前提出的图像分割方法很多,在此分为三种不同的途径对其进行分类:(1)以物体的的边界为对象进行分割;(2)先检测边缘像素,再将边缘像素连接起来形成分割;(3)以区域为对象进行分割,根据图像的灰度、色彩、变换关系或组织结构等方面的特征相似性来划分图像的子区域并将各像素划分到特定区域。
上述这些方法是互补的,不同的场合使用不同的方法,或者综合各个方法已达到最佳的分割效果。
3 设计内容3.1 先将彩色图像转换为灰度图像灰度图(Grayscale)是指只含亮度信息,不含色彩信息的图像,就像我们平时看到亮度由暗到明的黑白照片。
因此,要表示灰度图,就需要把亮度值进行量化。
通常划分成0到255共256个级别,0最暗(全黑),255最亮(全白)。
BMP 格式的文件中并没有灰度图这个概念,但是我们可以很容易地用BMP 文件来表示灰度图。
方法是用256色的调色板,只不过这个调色板有点特殊,每一项的RGB 值都是相同的,也就是说RGB 值从(0,0,0),(l ,l ,1)一直到(255,255,255)。
(0,0,0)是全黑色,(255,255,255)是全白色,中间的是灰色。
这样,灰度图就可用256色图来表示。
灰度图使用比较方便。
首先RGB 的值都一样;其次,图像数据即调色板索引值,也就是实际的RGB 的亮度值;另外因为是256色的调色板,所以图像数据中的一个字节代表一个像素。
如果是彩色的256色图,图像处理后有可能会产生不属于这256种颜色的新颜色,所以,图像处理一般采用灰度图[3]。
在本中会介绍将彩色图像转化为灰度图像的方法(图像灰度化处理)。
另外,本文所做的程序,如不做特殊说明,都是针对256级灰度图的。
图像灰度化由于实验使用的是彩色数码相机,所以最初输入计算机的是24位真彩色图像,而在本课题的后续研究中,如前面所述,主要是对灰度图像进行处理。
因此有必要将24位彩色图像转化为灰度图。
为了用计算机来表示和处理颜色,必须用定量的方法来描述颜色,即建立颜色模型,而颜色模型的基础是建立在色度学理论上的。
色度学理论是T.Young 在1802年提出的,其基本内容是:任何色彩均可以由三种不同的基本颜色按不同的比例混合而成,即:321cC bC aC C ++= (4.1)其中321,,C C C 为三原色(又称三基色),a ,b ,c 为三种原色的权值(三原色的比例或浓度),C 为所合成的颜色,可为任意颜色。
色彩与亮度均是一种视觉感受,这种感受分别产生红、绿、蓝的视觉感受。
实验已经证明,由对应三种视敏细胞而产生红、绿、蓝三种颜色作为任何颜色的基本色的理论称为三基色原理。
原理指出:(l) 自然界的可见颜色都可以用三种基色按一定比例混合得到;反之,任意一种颜色都可以分解为三种颜色。
(2) 作为原色的三种颜色应该相互独立,即其中任何一种都不能用其它两种混合得到。
(3) 三原色之间的比例直接决定混合色调的饱和度。
(4) 混合色的亮度等于各原色的亮度之积。
在目前提出的多种颜色模型中,RGB 颜色模型是实际应用中最多的一种。
我们在前面己经做了一些简单而具有代表性的介绍,我们在此的主要任务是如何将彩色图像转化为灰度图像,即图像灰度化处理。
灰度化就是替彩色位图的R ,G ,B 三个分量找一个合适的、相等的值,以便将其转换为灰度图的过程。
由于R ,G ,B 的取值范围是0~255,所以灰度的级别只有256级,即灰度图像仅能表现256种颜色(灰度)。
常用的灰度化处理方法有最大值法、平均值法和加权平均值法。
(l)最大值法:灰度值等于R ,G ,B 分量的最大值,即R=G=B=MAX(R ,G ,B)。
最大值法会形成亮度很高的图像。
(2)平均值法:灰度值等于R ,G ,B 分量的平均值,即R=G=B=(R+G+B)/3。
平均值法会形成比较柔和的图像。
(3)加权平均值法:根据重要性或其他指标给R ,G ,B 赋予不同的权值,并使,R ,G ,B 的值平均加权,即3)(B w G w R w B G R b g r ⨯+⨯+⨯===,式中b g r ww w ,,。
分别为R ,G ,B 的加权系数,且1=++r g r w w w 。
bg r w w w ,,取不同的值使用该方法将形成不同的灰度图像。
由于人眼对绿色敏感度最高,对红色的敏感度次之,对蓝色敏感度最低,因此使br g w w w >>将得到合理的灰度图像,实验和理论证明,当11.0,59.0,03.0===r g r w w w 时能得到最适合人眼观察的图像。
本文采用加权平均值灰度化法处理图像,所采用的加权系数为:11.0,59.0,03.0===r g r w w w ,由于灰度图像仅能显示256色灰度级,因此对真彩色图像(24位)进行灰度化处理时,首先要将其转化为8位位图,然后按加权平均值法进行灰度化处理。
灰度化处理后的效果如图2-1所示,原始图像采于室内自然光下,且为阴天。
图3.1.1 原始图像图3.1.2 灰度化后图像先将原彩色图变为灰度图。
灰度图像是指只含亮度信息,不含色彩信息的图像, 将彩色图像转化成为灰度图像的过程称为图像的灰度化处理。
再将灰度图二值化,图像的二值化处理就是将图像上的点的灰度置为0或255,也就是使整个图像呈现出明显的黑白效果。
即将256个亮度等级的灰度图像通过适当的阀值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
3.2 求出最大熵导出最佳阈值全局阈值法是指在二值化过程中只使用一个全局阈值T的方法。
它将图像的每个像素的灰度值与T进行比较,若大于T,则取为前景色(白色);否则取为背景色。
典型的全局阈值方法包括Otsu方法、最大熵方法等。
为了满足图像处理应用系统自动化及实时性要求,图像二值化的阈值的选择最好由计算机自动来完成(平均灰度值法,大津法,边缘算子法)3.3 将灰度图像转换成二值化图像图3.3.1 灰度图图3.3.2 二值化后图像4源代码及分析clear alla=imread('F:\02.JPEG');%读取图片Figure;imshow(a);%显示图片xlabel('ww');a=rgb2gray(a);%将彩色图变为灰度图Figure;imshow(a);%显示变换后图片xlabel('zz');count=imhist(a);[m,n]=size(a);N=m*n;L=256;count=count/N;%%%每一个像素的分布概率for i=1:Lif count(i)~=0st=i-1;break;endendfor i=L:-1:1if count(i)~=0nd=i-1;break;endendf=count(st+1:nd+1);%f是每个灰度出现的概率size(f)E=[];for Th=st:nd-1%设定初始分割阈值为Thav1=0;av2=0;Pth=0.5 %%第一类的平均相对熵为for i=0:Thav1=av1-count(i+1)/Pth*log(count(i+1)/Pth+0.00001); end%%第二类的平均相对熵为for i=Th+1:L-1av2=av2-count(i+1)/(1-Pth)*log(count(i+1)/(1-Pth)+0.00001); endE(Th-st+1)=av1+av2;endposition=find(E==(max(E)));%选取最大的熵th = st+position-1;for i=1:mfor j=1:nif a(i,j)>tha(i,j)=255;Elsea(i,j)=0;endendendfigure;imshow(a);%显示最终二值化图像xlabel('HH');5 功能仿真图及分析图5.1 原彩色图像图5.2 变换后的灰度图像图5.3 二值化后图像用上述的算法进行了实验,得到,各灰度级变化不明显,图三用最大熵的方法二值化后的人物比较清晰,背景和前景分的图像的二值化结果如图6.3,从仿真的结果来看,图二是将彩色图像变换成灰度图像割比较明显,分割效果比较理想,方法也非常简单。