GCS与无人机自动驾驶仪
自适应模糊自动驾驶仪在船舶航迹保持控制中的应用

第11卷第11期中国水运V ol.11N o.112011年11月Chi na W at er Trans port N ovem ber 2011收稿日期:2011-08-15作者简介:徐箭雨(),男,湖北省黄冈市人,桂林理工大学机械与控制工程学院讲师,硕士,研究方向为运动控制,智能控制。
自适应模糊自动驾驶仪在船舶航迹保持控制中的应用徐箭雨(桂林理工大学机械与控制工程学院,广西桂林541004)摘要:本文介绍的是基于头疼医模糊控制器的牺牲航迹保持。
控制器由一个工作于常规反馈闭环的Su gen o 模型的自动驾驶仪和一个工作于另一附加反馈闭环的可调比例因子机构组成。
可调机构代表了一个模糊控制器,它改变自动驾驶仪比例因子。
对于航迹保持问题,介绍了如何沿一条复杂航迹进行航迹点转向机动和船舶导航。
洋流和海浪干扰对航迹保持的影响也做了考虑。
最后把基于此控制策略的仿真结果与常规自适应模糊自动驾驶仪作了比较。
关键词:自适应模糊控制;航迹保持;干扰;船舶控制中图分类号:TP183文献标识码:A文章编号:1006-7973(2011)11-0077-02一、概述本文的目标在于设计出一种具有有线调整变量比例因子能力的自适应模糊自动驾驶仪,从而提高模糊逻辑控制技术在船只面对复杂干扰(如洋流和海浪)时的自适应能力。
船只的自适应模糊控制系统的跟踪效果图如图1所示。
由图形所知,航迹追踪系统可以通过引入额外的过程控制系统进行调控[1]。
控制系统包含了自适应模糊自动驾驶仪、舵机伺服系统、船舶、干扰和必要的传感器。
二、模糊自动驾驶仪模糊Su gen o 型自动驾驶仪包含两个控制输入:航向误差ψψ=de 和偏航率dt d r /ψ=。
自动驾驶仪所产生的控制输出是命令舵角。
图2显示了自动驾驶仪的方块图。
自动驾驶仪通过扩大在调节区域值的范围给定一输入和输出规范化区间[-3,3]。
图1自适应跟踪保持模糊控制系统图2B l ockdi agr am 模糊自动驾驶仪三、可调节比例因子机制为了在外部干扰(最重要的是洋流)存在时达到更好的航迹保持性能,自动驾驶仪会在线改变比例因子大小。
无人机 加拿大2028飞控-中文说明书 14 数据日志
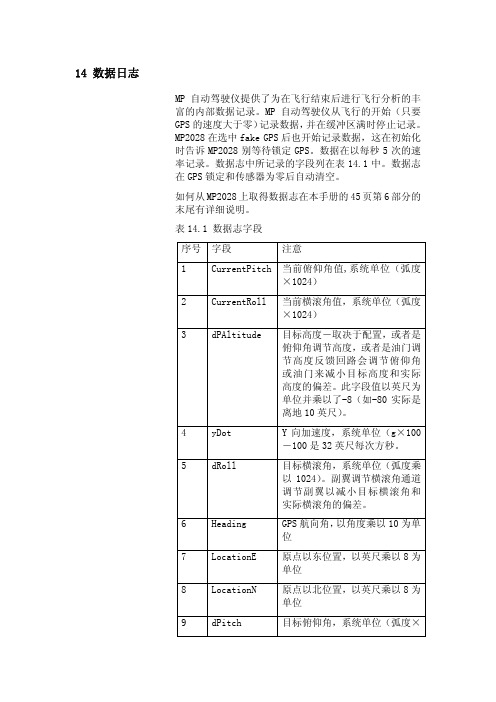
表 14.6 当前命令
8 LocationN 原点以北位置,以英尺乘以 8 为 单位
9 dPitch
目标俯仰角,系统单位(弧度×
1024)。升降舵调节俯仰角通道 调节升降舵以减小目标俯仰角 和实际俯仰角的偏差。
10 gpsSpeed
GPS 接收机的速度,以英尺每秒 为单位
11 AGL
超声波变换器的原始输出-除 以 36.5 转换为英尺。若 AGL 板 没启用,此字段无定义。
dot
1024/s×21 为单位(也就是将其
值除以 375 就得 degree/s
44 Body roll dot 横滚角点,在机体轴,单位同上
45 Body yaw dot 偏航角点,在机体轴,单位同上
46 targetheadin 目标航向角,以度为单位。横滚
g
角调节航向角通道调节目标横
滚角以减小目标航向角和实际
12 GPS Status GPS 接收机状态。见表 39 的该字 段的详细描述。
13 Servo 1 ( 副 Servo 1 位置(数字舵机) 翼)
14 Servo 2(升降 Servo 2 位置(数字舵机) 舵)
15 Servo 3(方向 Servo 3 位置(数字舵机) 舵)
16 Servo 4 ( 油 Servo 4 位置(数字舵机) 门)
4 yDot
Y 向加速度,系统单位(g×100 -100 是 32 英尺每次方秒。
5 dRoll
目标横滚角,系统单位(弧度乘 以 1024)。副翼调节横滚角通道 调节副翼以减小目标横滚角和 实际横滚角的偏差。
6 Heading
GPS 航向角,以角度乘以 10 为单 位
7 LocationE 原点以东位置,以英尺乘以 8 为 单位
飞机自动驾驶仪的分类
飞机自动驾驶仪的分类飞机自动驾驶仪是一种能够实现飞行任务的自动化设备。
根据其功能和应用领域的不同,可以将飞机自动驾驶仪分为以下几类。
一、导航自动驾驶仪导航自动驾驶仪是飞机上的一种重要设备,主要用于飞行导航和航迹控制。
它通过接收来自飞机导航系统的导航信号,实现对飞机飞行状态的监控和控制。
导航自动驾驶仪能够根据预设的航路和目标点,自动控制飞机的航向、航迹和高度,从而减轻飞行员的工作负担,提高飞行的安全性和准确性。
二、高度自动驾驶仪高度自动驾驶仪是一种用于控制飞机高度的自动驾驶设备。
它通过接收来自飞机高度测量系统的信息,实时监测飞机的高度,并根据预设的高度参数进行控制。
高度自动驾驶仪能够自动调整飞机的升降舵和推力,以保持飞机在预设的高度上稳定飞行。
这种自动控制系统可以有效地减轻飞行员的工作负担,提高飞行的安全性和舒适性。
三、速度自动驾驶仪速度自动驾驶仪是一种用于控制飞机速度的自动驾驶设备。
它通过接收来自飞机速度测量系统的信息,实时监测飞机的速度,并根据预设的速度参数进行控制。
速度自动驾驶仪能够自动调整飞机的推力和襟翼,以保持飞机在预设的速度上稳定飞行。
这种自动控制系统可以提高飞行的安全性和燃油效率,减少飞行员的工作负担。
四、仪表自动驾驶仪仪表自动驾驶仪是一种用于控制飞机仪表飞行的自动驾驶设备。
它通过接收来自飞机仪表系统的信息,实时监测飞机的姿态和航向,并根据预设的飞行参数进行控制。
仪表自动驾驶仪能够自动调整飞机的副翼和方向舵,以保持飞机在预设的航向和姿态上稳定飞行。
这种自动控制系统可以提高飞行的安全性和准确性,减轻飞行员的工作负担。
五、着陆自动驾驶仪着陆自动驾驶仪是一种用于控制飞机着陆的自动驾驶设备。
它通过接收来自飞机降落系统的信息,实时监测飞机的下滑角、速度和位置,并根据预设的着陆参数进行控制。
着陆自动驾驶仪能够自动调整飞机的推力、襟翼和起落架,以实现自动着陆。
这种自动控制系统可以提高飞行的安全性和准确性,减少飞行员在复杂天气条件下的操作难度。
APM Flight Modes 飞行模式介绍(超详细)

APM Flight Modes 飞行模式介绍概述多旋翼(直升机)一共有14 个内置的飞行模式,10个的常用的。
飞行模式可以通过遥控器控制,也可以通过GCS地面站进行发送命令更改遥控器和地面站都可以同时控制飞行模式,通常以最后一个命令为准推荐使用的飞行模式一般来讲,当第一次使用APM:Copter的时候,你应该依次使用下列飞行模式获得提高,要保证熟练了再进行下一个。
点击下方任意飞行模式可获得更多信息。
•Stabilize (增稳模式)•Alt Hold (定高模式、高度保持模式)•Loiter (悬停模式)•RTL (Return-to-Launch) (回家模式:返回起飞点)•Auto (自动模式:自动航点飞行,需要依靠GPS)其他飞行模式:•Acro 特技模式(没有飞控辅助增稳的模式)•AutoTune 自动微调(当飞机往一个严重偏的时候,可以执行自动微调)•Brake 刹车锁定模式(将飞机锁定在一个位置,而不受遥控器摇杆影响)•Circle 绕圈模式(绕着兴趣点画圈)•Drift 漂移模式•Guided 引导模式Guided_NoGPS 引导模式-不需要GPS•Land 降落模式•PosHold 定点模式•Sport 运动模块•Throw 抛飞模式(把无人机抛在空中,自动起飞稳定)•Follow Me 跟随模式(无人机跟着你飞行,但是需要GPS和手机地面站配合)•Simple and Super Simple (简单和超级简单模式)•Avoid_ADSB (基于ADSB的避让载人飞机模式。
需要外界ADSB模块)•大多数遥控器只有一个三段开关,所以只能设置三种模式。
如果需要设置6种模式,可以进行开关混控需要依赖GPS的飞行模式:有些飞行模式需要依赖GPS才能飞行,你可以通过状态灯或者地面站获知GPS 是否已经锁定。
以下飞行模式需要GPS锁定才能解锁飞行:•Loiter 悬停模式•RTL (Return-to-Launch) 回家模式•Auto 自动模式•Guided 引导模式•Drift 漂移模式•PosHold 定点模式•Follow Me 跟随模式•Circle 绕圈模式•Throw 抛飞模式不需要依赖GPS锁定的飞行模式:•Stabilize 自稳模式•Alt Hold 定高模式•Acro 特技模式•Sport 运动模式•Land 降落模式全部模式列表:(点击对应的模式查看详解)•Acro Mode•Altitude Hold Mode•Auto Mode•Brake Mode•Circle Mode•Drift Mode•Follow Me Mode (GSC Enabled)•Guided Mode•Land Mode•Loiter Mode•PosHold Mode•Position Mode•RTL Mode•Simple and Super Simple Modes•Sport Mode•Stabilize Mode•Throw ModeStabilize增稳模式概述:•飞手用roll与pitch操作控制飞行器的倾斜角度。
IFLY无人机系列产品简介改

无人机系列产品介绍:iFLY系列自动驾驶仪是我公司自主研发、具有自主知识产权的高科技产品,前有iFLY40、iFLY50、iFLY80系列、以及系列无人机产品。
飞控系列产品:IFLY V4.2代飞控内核:iFLY40集成了丰富的传感器件,硬件性能强大,陀螺和加速度计采用24位采样和捷联算法,提高测姿精度。
iFLY40硬件配置:iFLY40自驾仪可以包括导航(NAV)、飞控(FCS)、舵机扩展板(ExServ )、用户模式扩展板(Ex10)等,相互之间通过CAN 总线进行通讯。
3个CPU 设计,飞控计算机66MHz ,导航计算机 66MHz ,手/自驾切换模块8MHz ,手/自驾切换模块具有很高可靠性设计,数字开关直接切换,降低试飞风险。
4M 可擦写存储器,提供长达6小时黑匣子数据记录功能。
传感器配置齐全,集成三轴MEMS 陀螺、三轴MEMS 加速度计、气压高度计、气压空速计、数字磁罗盘、12通道GPS 接受机,给出较精确的三维姿态,实现姿态控制,给出捷联航向,同时给出地速和空速。
强大的扩展能力,提供4路舵面舵机,油门舵机1路,任务舵机5路,舵机输出分辨率为10位,更新频率为25Hz 。
可通过CAN 总线扩展各种高级功能,包括A/D 采样、最多128路开关量和伺服舵机、多组动力电池管理、其它航电系统在线自检等。
技术规格:重量:电路板重57克(含飞控、导航和手自驾切换模块),加上屏蔽外壳、航空插头、舵机接线板、GPS 天线后重157克 尺寸:35×35×120毫米(含屏蔽壳) 功 耗:1200毫瓦 使用电压: 主电源:6.5~10伏手自动切换模块:4.5~10伏(通常与遥控接收机共用电池)使用温度:-15~65摄氏度使用过载:5G破坏过载:200G测量速度范围:空速管80米/秒,GPS 350米/秒最大高度:4500米飞控功能:稳定姿态,爬升和俯冲航向、高度稳定控制支持手掷、弹射和滑跑起飞注3支持伞降、深失速降落和滑跑降落注4支持多种固定翼舵面布局,支持飞艇,4路舵面舵机输出可任意混控,也可以映射到5路任务舵机输出。
无人机系统集成考试 选择题 50题
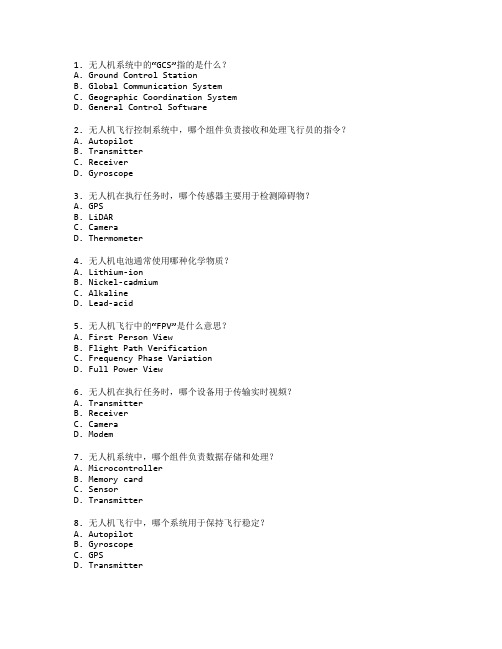
1. 无人机系统中的“GCS”指的是什么?A. Ground Control StationB. Global Communication SystemC. Geographic Coordination SystemD. General Control Software2. 无人机飞行控制系统中,哪个组件负责接收和处理飞行员的指令?A. AutopilotB. TransmitterC. ReceiverD. Gyroscope3. 无人机在执行任务时,哪个传感器主要用于检测障碍物?A. GPSB. LiDARC. CameraD. Thermometer4. 无人机电池通常使用哪种化学物质?A. Lithium-ionB. Nickel-cadmiumC. AlkalineD. Lead-acid5. 无人机飞行中的“FPV”是什么意思?A. First Person ViewB. Flight Path VerificationC. Frequency Phase VariationD. Full Power View6. 无人机在执行任务时,哪个设备用于传输实时视频?A. TransmitterB. ReceiverC. CameraD. Modem7. 无人机系统中,哪个组件负责数据存储和处理?A. MicrocontrollerB. Memory cardC. SensorD. Transmitter8. 无人机飞行中,哪个系统用于保持飞行稳定?A. AutopilotB. GyroscopeC. GPSD. Transmitter9. 无人机在执行任务时,哪个设备用于测量高度?A. AltimeterB. ThermometerC. HygrometerD. Anemometer10. 无人机系统中,哪个组件负责提供动力?A. MotorB. BatteryC. PropellerD. Controller11. 无人机飞行中,哪个系统用于导航?A. GPSB. GyroscopeC. AltimeterD. Transmitter12. 无人机在执行任务时,哪个设备用于测量风速?A. AnemometerB. HygrometerC. ThermometerD. Altimeter13. 无人机系统中,哪个组件负责控制飞行方向?A. RudderB. AileronC. ElevatorD. Flap14. 无人机飞行中,哪个系统用于保持水平飞行?A. AutopilotB. GyroscopeC. GPSD. Transmitter15. 无人机在执行任务时,哪个设备用于测量温度?A. ThermometerB. HygrometerC. AnemometerD. Altimeter16. 无人机系统中,哪个组件负责控制飞行速度?A. ThrottleB. RudderC. AileronD. Elevator17. 无人机飞行中,哪个系统用于保持飞行高度?A. AutopilotB. GyroscopeC. GPSD. Altimeter18. 无人机在执行任务时,哪个设备用于测量湿度?A. HygrometerB. ThermometerC. AnemometerD. Altimeter19. 无人机系统中,哪个组件负责控制飞行姿态?A. AutopilotB. GyroscopeC. GPSD. Transmitter20. 无人机飞行中,哪个系统用于保持飞行路径?A. GPSB. GyroscopeC. AutopilotD. Transmitter21. 无人机在执行任务时,哪个设备用于测量气压?A. BarometerB. HygrometerC. ThermometerD. Anemometer22. 无人机系统中,哪个组件负责控制飞行模式?A. AutopilotB. GyroscopeC. GPSD. Transmitter23. 无人机飞行中,哪个系统用于保持飞行速度?A. AutopilotB. GyroscopeC. GPSD. Throttle24. 无人机在执行任务时,哪个设备用于测量风向?A. AnemometerB. HygrometerC. ThermometerD. Altimeter25. 无人机系统中,哪个组件负责控制飞行轨迹?A. AutopilotB. GyroscopeC. GPSD. Transmitter26. 无人机飞行中,哪个系统用于保持飞行稳定性?A. AutopilotB. GyroscopeC. GPSD. Transmitter27. 无人机在执行任务时,哪个设备用于测量光照强度?A. Lux meterB. HygrometerC. ThermometerD. Anemometer28. 无人机系统中,哪个组件负责控制飞行高度?A. AutopilotB. GyroscopeC. GPSD. Altimeter29. 无人机飞行中,哪个系统用于保持飞行方向?A. AutopilotB. GyroscopeC. GPSD. Transmitter30. 无人机在执行任务时,哪个设备用于测量电磁场强度?A. EMF meterB. HygrometerC. ThermometerD. Anemometer31. 无人机系统中,哪个组件负责控制飞行姿态?A. AutopilotB. GyroscopeC. GPSD. Transmitter32. 无人机飞行中,哪个系统用于保持飞行路径?A. GPSB. GyroscopeC. AutopilotD. Transmitter33. 无人机在执行任务时,哪个设备用于测量声音强度?A. Sound level meterB. HygrometerC. ThermometerD. Anemometer34. 无人机系统中,哪个组件负责控制飞行模式?A. AutopilotB. GyroscopeC. GPSD. Transmitter35. 无人机飞行中,哪个系统用于保持飞行速度?A. AutopilotB. GyroscopeC. GPSD. Throttle36. 无人机在执行任务时,哪个设备用于测量振动强度?A. Vibration meterB. HygrometerC. ThermometerD. Anemometer37. 无人机系统中,哪个组件负责控制飞行轨迹?A. AutopilotB. GyroscopeC. GPSD. Transmitter38. 无人机飞行中,哪个系统用于保持飞行稳定性?A. AutopilotB. GyroscopeC. GPSD. Transmitter39. 无人机在执行任务时,哪个设备用于测量辐射强度?A. Geiger counterB. HygrometerC. ThermometerD. Anemometer40. 无人机系统中,哪个组件负责控制飞行高度?A. AutopilotB. GyroscopeC. GPSD. Altimeter41. 无人机飞行中,哪个系统用于保持飞行方向?A. AutopilotB. GyroscopeC. GPSD. Transmitter42. 无人机在执行任务时,哪个设备用于测量电流强度?A. AmmeterB. HygrometerC. ThermometerD. Anemometer43. 无人机系统中,哪个组件负责控制飞行姿态?A. AutopilotB. GyroscopeC. GPSD. Transmitter44. 无人机飞行中,哪个系统用于保持飞行路径?A. GPSB. GyroscopeC. AutopilotD. Transmitter45. 无人机在执行任务时,哪个设备用于测量电压强度?A. VoltmeterB. HygrometerC. ThermometerD. Anemometer46. 无人机系统中,哪个组件负责控制飞行模式?A. AutopilotB. GyroscopeC. GPSD. Transmitter47. 无人机飞行中,哪个系统用于保持飞行速度?A. AutopilotB. GyroscopeC. GPSD. Throttle48. 无人机在执行任务时,哪个设备用于测量电阻强度?A. OhmmeterB. HygrometerC. ThermometerD. Anemometer49. 无人机系统中,哪个组件负责控制飞行轨迹?A. AutopilotB. GyroscopeC. GPSD. Transmitter50. 无人机飞行中,哪个系统用于保持飞行稳定性?A. AutopilotB. GyroscopeC. GPSD. Transmitter答案:1. A2. C3. B4. A5. A6. A7. B8. A9. A10. B11. A12. A13. A14. A15. A16. A17. D18. A19. A20. A21. A22. A23. D24. A25. A26. A27. A28. D29. A30. A31. A32. A33. A34. A35. D36. A37. A38. A39. A40. D41. A42. A43. A44. A45. A46. A47. D48. A49. A50. A。
适用于垂直起降固定翼无人机低成本、工业级飞行控制与

采用飞思卡尔公司的MPC5200B处理器,抗干扰能力强、可靠性高、处理能力强、功耗低、外设接口丰富;支持多种飞行模式(手动模式/半自动模式/自动航线模式);集成了高精度IMU模块、高精度磁传感器、采用高性能非线性GPS/SINS/AHRS算法,具有400Hz更新频率,姿态精度高,GPS信号不好时自动平滑切换为AHRS模式;多旋翼部分采用L1自适应控制算法,具有极高精度的姿态与航迹控制性能;抗扰动能力强、稳定性好,控制精度及稳定性不因飞机的重心、重量的变化而受影响;具有可定制的应急处理能力(已经包含电压过低、GPS卫星丢失、数据链超时、手动指令超时、高度过低、高度过高等常规的应急处理设置);支持二轴及三轴云台控制;可外接JOUAV PPS-100后差分模块,支持高精度航测;内置32MByte数据存储器,可以完整记录4~8小时的飞行数据;内部集成1W发射功率的跳频数传电台,地面站控制距离可达10km~30km;支持云监管功能。
性能特点MP - 101V 适用于垂直起降固定翼无人机低成本、工业级飞行控制与导航系统MP-101V是成都纵横自动化技术有限公司专为垂直起降固定翼无人机研制的低成本、工业级飞控与导航系统。
集成了高精度的MEMS惯性传感器、高性能中央处理器。
支持全自动航线飞行和30KM有效距离的半自动飞行。
抗电磁干扰、抗振动能力强,可靠性高;采用自适应飞控与导航算法、容错性能好,是低成本电动垂直起降固定翼无人机的理想选择。
成都纵横自动化技术有限公司电气参数物理特性使用环境配置清单供电:DC8~26V 功耗:<5W 外形尺寸:109×85×40mm 重量:300克存储温度:-55 ~ +85ºC 使用温度:-25 ~ +60ºC(校准温度范围)MP-101V 自动驾驶仪1台GCS-50/50W地面站1台J30J-51芯航空连接器1套电台天线2根(地面站测试适用)机载电台馈线1根地面站电源线1根。
极智科技固定翼自动驾驶仪用户手册说明书

目录一、航测任务规划 (2)1.基本设置流程 (2)2.航测规划高级功能 (7)二、执行飞行任务 (10)1.起降场地选取 (10)2.设置任务/加载任务 (12)3.起降设置设置 (13)4.飞机连接 (18)5.飞机行前检查 (19)6.起飞教程 (20)7.监视及控制 (22)8.飞行着陆 (23)三、一键POS数据及照片导出 (23)一、航测任务规划航测作业要求严格遵守当地的法律法规,严禁将航测区域设置在禁飞区域内。
用户需对作业区域提前做实地考察,了解当地的地形地貌,城镇布局及人口密度等信息,为起降场地的选取,航线规划等提供依据。
下图为UAV GCS航测任务规划流程:1.基本设置流程(1)设置航测区域方法1:UAV GCS规划航测区域在地图中找到航测区域,建议使用“UAV”选项卡中“搜索位置”功能,找到航测区域位置。
点击右侧航测选项卡,在地面站地图显示区可见一个阴影多边形区域,单击拖动该阴影区域至所需航测位置,单击多边形的边增加多边形的顶点,通过拖动多边形的顶点可调整航测区域的范围及形状。
提示:如果点击航测选项卡后,地图区域没有显示阴影区域,可在地图区域点击右键,选择“重置航测区域于此处”即可。
方法2:导入KML文件生成作业区域若已在谷歌地球软件上规划好航测区域,可在地面站直接导入KML文件,生成作业区域。
具体操作:点击“UAV”菜单栏,点击“导入测区KML”,选择KML文件,地图区域将显示KML叠加区域,在区域中单击右键选择“从该kml创建航测区域”即可创建航测区域。
删除KML:在KML区域右键“删除该KML区域”即可删除该KML区域。
(2)设置航测参数在航测选项卡中按航测要求设定分辨率、飞行高度、航线角度与重叠率,其中飞行高度与分辨率互为影响,无人机飞行高度越高,飞行时获得的图像中每个像素所代表的地面距离就越大,单次作业面积越大。
●提示:增大横向重叠率航线密度增大,单位时间内作业面积会减少。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四讲:GCS与无人机自动驾驶仪★这一讲的内容,基本以YS09自驾的基本内容来展开。
1.GCS的引进光看视频监视器,依然不能直观地了解飞机的实时位置信息。
这时候可以引入简单的地面站软件系统,利用便携式电脑而不是小电视来显示遥测数据。
有了GCS,就能扩展许多新功能,比如:功能一:更直观地显示飞机的实时位置。
即载入电子地图,显示飞机的实时飞行轨迹;功能二:指哪飞哪。
即,在地图上选定一个点,让飞机飞往该点并绕之盘旋。
实际上是盘旋功能的扩展。
此外,还有定点盘旋、到达航点后盘旋、云台锁定目标盘旋等扩展方式。
功能三:显示更多有用数据。
便携式电脑上能以仪表、数据选项卡(位置可复用)等形式来加强数据显示功能。
功能四:航线功能有了GCS后,自驾系统可以进一步扩展出一个航线功能。
在地图上选定几个航点,根据映射关系知道这几个航点的经纬度数据,然后给每个点预设一个飞行高度,就能生成一条目标航线。
把航线数据上传到自驾上,就能让飞机以更精确的方式来执行航拍任务了。
2.航模与无人机有什么关系?(1)RC发射机手动控制与GCS自动控制简单来理解,无人机尺寸比航模大,载重比航模多,通信距离比航模远,自动化程度比航模高。
其中最重要的区别,就是无人机的高度自动化的工作方式。
在航模中,RC发射机是最主要的命令发信源,手动模式是最基本的飞行控制模式,在无人机中,带GCS(Ground Control Station,即地面站软件)的便携式电脑,是最主要的命令发信源,而自动模式才是最基本的飞行控制模式。
所谓自动模式,就是,用户在电脑上发出命令,然后通过数据链路(GCS->串口->地面数传电台->机载数传电台->飞行控制器)传到飞机上,由飞机上的飞行控制器分析处理后,再去驱动各执行设备(如舵机)的工作。
可以认为,GCS自动控制是RC发射机手动控制的扩展和延伸。
还可以做其他的类比:GCS的遥测数据监视,是OSD的扩展和延伸;GCS的通信协议,是PWM规则的扩展和延伸;GCS的参数设置,是舵机通道感度旋钮的扩展和延伸;等。
(2)有三种通过GCS发出控制命令的方法:①直接点击某个按钮或菜单,如“开伞”功能,GCS就自动按照专用的通信协议产生一条数字命令;②先以键盘输入、鼠标动作、RC发射机动作等形式向GCS录入一个或一组数据,然后由GCS按照专用的通信协议打包成一条数字命令;③先进入某种状态,然后使用鼠标或键盘持续操作,如拖动某个滚动条或在电子地图上点击不同的点,鼠标或键盘的每次操作,都会使GCS按照专用的通信协议产生一条对应的数据命令。
(3)通信协议百度百科解释:“通信协议(communications protocol)是指双方实体完成通信或服务所必须遵循的规则和约定。
协议定义了数据单元使用的格式,信息单元应该包含的信息与含义,连接方式,信息发送和接收的时序,从而确保网络中数据顺利地传送到确定的地方。
”上图是FY21AP通信协议中的一个指令,用于向自动驾驶仪上传定高飞行的高度参数。
假设在GCS中设置的高度为100米,换成十六进制就是Ox64(100=16*6+1*4),于是高位data2=0x00,低位data3=0x64 。
指令字长是5位,于是data0=0x05,指令功能识别号为0xb1,于是data1=0xb1。
然后是校验码,把data0-data3加起来等于5+177+0+100=282,除以256后余数为26,即0x1a,于是data4=0x1a。
于是要上传的完整指令就是:“0xa5-0xa5-0x05-0xb1-0x00-0x64-0x1a-0xaa”。
自驾收到指令后按照通信协议进行解读,首先连读到两个“0xa5”,知道是一条指令的开始标识,接着读到一个“0x05”,知道这条指令有效字长为5,接着读到“0xb1”的功能识别号,知道这是一条设置高度的指令,然后是“0x00-0x64”,知道高度为100米,然后已经来到有效数据的最后一位,就把前面的四个数字累积并求余,得到一个数字,拿这个数字来和“0x1a”进行对比,如果两者相等,则校验成功,如果不相等,则视为无效数据直接丢弃。
(4)无人机、自驾与航拍自驾与无人机的典型应用就是航拍。
即按预设航线自主飞行,按预定方式采集有用的图像资料。
也就是说,YS09自驾在无人机上的主要功能就是,使飞机平稳的压线飞行,可以实时增删航点、修改航点信息,可以实时调整飞行参数,可以实时飞往任意点(包括预设航点和临时兴趣点),并调整飞行高度,在此基础上,控制云台转动,驱使照相机和摄像头进行拍摄。
做个简单类比,说明云台的作用。
摄像头好比人的眼睛,可以用来看风景,云台就好比人的头部,可以转动到不同角度来看周围的风景。
一般而言,拍照时很少使用云台,或只使用正射云台(镜头一直垂直向下,当飞机偏离水平位置时,自驾会发出增稳信号使镜头回到垂直向下的状态)。
拍视频时,基本上都要用到云台,一般是目标锁定云台(它的高级用法是“凝视”,即飞机绕目标点盘旋,而镜头始终对准地面目标。
)3.从功能升级的角度简述自主飞行与航拍的关系1)无人机航拍的基本内容自主飞行与图像采集。
本文主要讲解固定翼无人机的测绘级航拍(以YS09自驾为例)。
2)自主飞行的内容需要进行姿态测量与位置测量,还有最终全都转化为舵机控制的姿态控制与位置控制。
3)图像采集的内容分成两类:自动照相与录像。
分三种情况:离线回收或实时回传,或两者兼有)。
4)YS09自驾需要对以下设备进行操作:①简单分为五组:电池、自驾、RC链路设备(RC发射机与RC接收机)、数据链路设备(数传电台、USB-串口转换器和便携式电脑),以及舵机。
②地面控制设备:RC发射机、地面数传电台、USB-串口转换器、便携式电脑、12V地面电台电池。
③机载飞行设备RC接收机、机载数传电台、12V自驾电池(同时还直接给机载电台供电)、6V舵机电池(或由其他途径获取6V电源)、自驾、GPS、气压计导管、马达、机体、飞行舵机(AIL/ELE/RUD)、电调(电动飞机专用,油动飞机还是使用舵机)、降落伞舵机等。
④机载图像采集设备云台舵机(最多三轴)、照相机(利用快门线信号)、摄像头(若能调焦)。
5)与YS09无关的其他设备①地面图像设备:图传接收机,视频监视器,以及DVR。
①机载图像设备:图传发射机,OSD。
6)无人机自驾的等级分类可简单分为FPV级、普通航拍级与测绘级。
因为无人机自驾里的大部分功能都集成在GCS中,因此,可以根据GCS功能的完备性来区分无人机自驾的等级。
甚至可以认为,不带GCS的自驾,根本就不是无人机自驾。
7)FPV级自驾(当前市场参考价为1500-5000人民币)过去,FPV自驾能控制增稳和自动回航,但很少提供GCS功能。
随着技术门槛不断降低,也有不少FPV自驾开始提供GCS操作,不过一般只有数据监视而不支持实际控制,或允许输入少数航点进行简单航线飞行(但压线效果很差,即多航点功能与压线飞行完全是两码事)。
如果一款FPV自驾能支持GCS航点输入与简单航线飞行,那么它就可以归类为FPV级无人机自驾。
FPV级自驾一般只进行简单的互补级传感器数据融合而没有经过复杂的GPS辅助数据融合,不支持空速控制,所以姿态测量精度不高,相关的飞行控制效果也有明显的限制。
FPV级自驾一般只适用于玩家领域,用于简单娱乐与初级商业航拍。
8)普通航拍级自驾(当前市场参考价为5000-20000人民币)必须带有GCS(不带GCS就无法提供完备的航线飞行功能)。
普通航拍级自驾支持简单的航线飞行功能,压线效果比FPV级自驾的好一些(基本能压线飞行,但切入航线效果不好,而且经常容易偏离目标航线,盘旋时的飞行轨迹也不是特别圆)。
此类自驾传感器数据融合效果比FPV级要好,因此飞行控制效果要高一个等级。
但很多自驾依然不带空速控制。
也就是,姿态控制和位置控制效果依然不够精确稳定。
在图像采集方面,还可以分为三个等级:初级(提供手动拍照和手动云台控制接口,但自动控制功能很少),中级(能自动拍照,但不支持云台增稳等自动功能)和高级(能自动拍照,支持云台增稳)。
此类自驾一般用于初级商业航拍(农田、林木、公路等的常规巡视),其航拍照片能拼接粗略的全景图,但不能用于测绘用途(没有精确的POS信息,甚至不提供POS信息),其航拍视频能达到粗略的侦察效果,但不够完备(固定翼飞机只能盘旋而不能悬停,只能通过兴趣点盘旋和云台辅助观测来提高侦察效果的完备性)。
9)普通航拍级自驾与测绘级自驾的区别①普通航拍级自驾不能提供云台目标锁定功能(工作原理看似简单,但真正的编程实现非常困难),一般也不提供太多的高级航线功能(如航点很少,无样式功能,不能便利地更改飞行方式等),同时不提供高级的安全保障功能(如语音报警等)。
②测绘级自驾的特点姿态精度(无论测量或控制)2度以内,即正常巡航飞行时,机体晃动不超过2度。
含丰富的GCS(Ground Control Station,即地面站软件)功能,其中的样式航线飞行功能(用户人工输入四个航点,系统会自动生成多条带辅助转弯航点的等距平行航线来覆盖拍照区域)用于测绘级拍照,此外,云台目标锁定(飞机绕目标点盘旋,摄像头始终对准地面目标点)用于战术级侦察。
此类自驾还能提供丰富的升级扩展功能(如支持DGPS、雷达等)。
10)测绘级自驾(市场参考价20000-150000RMB)参见本文对YS09的具体描述。
YS09是测绘级自驾,比FPV自驾高两个档次,比普通航拍级自驾高一个档次。
4.GCS的遥测数据监视数据信道连通后,自驾将会通过下行数据链路,把遥测数据传回地面,逐条保存在轨迹文件中,同时在GCS中实时显示出来。
1)通过“GCS->菜单栏->查看”隐藏(或显示)局部功能界面2)查看GCS仪表栏(GCS->菜单栏->视图->飞行控制)将会出现四个仪表:GPS地速(km/h),气压高度(m),姿态仪表(“左1”表示左机翼低于水平线1度,“俯1”表示机头高于水平线1度,其他依次类推),以及转速仪表(对电动飞机无意义,只对油动飞机有效)。
3)飞行数据栏上的各种数据①“电压数据”选项卡(图略)②“其他数据”选项卡主要包括:GPS数据组、加速度计数据组、电池数据组以及自驾数据组。
第一组:GPS数据。
包括当前飞机的GPS位置信息:经纬度、海拔高度、对地速度,时间信息,以及卫星定位情况标识。
其中卫星定位情况标识“PDOP值”,数值越小,定位情况越好。
第二组:加速度计数据。
包括:后向加速度、下向加速度、右向加速度、静态角度以及震动超限记数。
其中震动极限计数用于衡量当前的机体震动情况。
正常是绿色显示,数值为零。
不为零时红色显示,表明震动过大,系统处于非正常工作状态,需要紧急处理。