冲压机械手液压控制系统设计资料
机械手液压系统控制系统设计

内 结构;设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气
容 缸的驱动力矩;设计了机械手的手臂结构,设计了手臂伸缩、升降用液压缓冲器
及 和手臂回转用液压缓冲器。设计出了机械手的气动系统,绘制了机械手气压系
目 标
统工作原理图。利用可编程序控制器对机械手进行控制,选取了合适的 PLC 型 号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手
课程设计任务书
学
课程 机械手液压系统控制系统 生
设计
姓
题目 设计
名
导 师 姓 名
机械手的组成和分类,机械手的自由度和座标型式,气动技术的特点,PLC
控制的特点及国内外的发展状况。本文简要地介绍了工业机器人的概念,本文
主 对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机
要 械手的技术参数。同时,分别设计了机械手的夹持式手部结构以及吸附式手部
3.2.1.电源模块 .................................................................................................................. 7 3.2.2. 控制模块................................................................................................................7 3.2.3.执行模块 .................................................................................................................. 8 3.2.4.温度采集模块 .......................................................................................................... 8 3.2.5.显示模块 ................................................................................................................ 10 3.3.元器件清单....................................................................................................................... 11 4.系统软件设计 ........................................................................................................................... 121 4.1.软件流程图..................................................................................................................... 122 4.2.软件代码(见附录) ..................................................................................................... 123 5.调试部分 ................................................................................................................................... 123 5.1.调试中遇到的问题............................................................................. 错误!未定义书签。 5.2.调试过程......................................................................................................................... 125 5.3.调试结果与分析 ............................................................................................................... 13 6.总结 ........................................................................................................................................... 256 7.参考文献 ................................................................................................................................... 256 8.致谢 ..............................................................................................................错误!未定义书签。6 9.附录 ..............................................................................................................错误!未定义书签。6
冲压机械手方案

冲压机械手方案冲压机械手是一种用于汽车零部件冲压生产的自动化设备,它能够高效地完成零部件的搬运和组装工作。
在汽车制造过程中,冲压工艺起着非常重要的作用,因此冲压机械手的方案设计显得尤为关键。
本文将提出一种冲压机械手的方案,旨在为汽车制造企业提供高效、稳定的生产解决方案。
一、方案概述本方案旨在设计一台高效、灵活、稳定的冲压机械手,能够适应不同形状、尺寸的冲压件的搬运和组装工作。
机械手包括上下料装置、传感器、控制系统等多个部分,能够实现自动化操作,提高生产效率和质量。
二、方案设计1. 机械结构设计机械手的机械结构设计是整个方案的核心。
我们采用XYZ三轴机械结构,分别对应着机械手的横移、纵移和升降功能。
这样的设计可以实现机械手在三个方向的灵活移动,适应不同形状、尺寸的冲压件。
2. 控制系统设计我们采用PLC控制系统来实现对冲压机械手的自动化控制。
通过编程,可以对机械手的运动轨迹、速度等参数进行精确调控,从而提高生产效率和质量。
同时,我们在控制系统中加入了传感器模块,能够实时监测冲压件的位置和状态,确保机械手的操作准确无误。
3. 安全保护设计为了确保冲压机械手的安全运行,我们在方案中设计了各种安全保护措施。
例如,机械手的末端装有触摸传感器,一旦检测到异常情况,机械手会自动停止工作,避免意外发生。
此外,我们还在机械手的周围设置了防护罩,保护操作人员的安全。
4. 程序设计在冲压机械手的方案中,程序设计是非常重要的一环。
通过编写合理的程序,机械手能够按照预定的路径和动作完成搬运和组装工作。
我们将根据冲压件的形状和尺寸,编写适应的程序,确保机械手的操作准确无误。
三、方案优势1. 提高生产效率:冲压机械手能够自动执行搬运和组装任务,大大减少人工操作的时间和劳动力成本,提高生产效率。
2. 提高产品质量:机械手的自动化操作可以减少人为操作的误差,保证产品的一致性和质量稳定性。
3. 灵活性和适应性强:冲压机械手能够适应不同形状、尺寸的冲压件,通过程序调整和机械结构设计,实现灵活的搬运和组装。
液压机械手PLC控制系统的设计

液压机械手PLC控制系统的设计概述本文档旨在介绍液压机械手PLC(可编程逻辑控制)控制系统的设计。
液压机械手是一种常见的工业设备,通过液压系统实现运动控制,而PLC作为控制系统的核心,负责控制信号的处理和输出。
设计要求液压机械手PLC控制系统的设计要满足以下要求:1. 稳定性:系统必须具有高稳定性,以确保机械手的运动精准度和安全性。
2. 功能性:系统需要具备多种功能,如位置控制、速度调节等,以满足不同场景的需求。
3. 可扩展性:系统应具备良好的可扩展性,以便于将来的升级和功能增加。
4. 易维护性:设计应考虑到系统的维护和故障排除,以便于后续维护工作的进行。
硬件设计液压机械手PLC控制系统的硬件设计包括以下方面:1. 选型:选择适合的PLC设备,根据需求选用不同型号和规格的PLC,确保其性能和稳定性。
2. 传感器:选择合适的传感器,如位移传感器、压力传感器等,用于采集机械手运动状态和环境信息。
3. 执行器:选择合适的液压阀、液压泵等执行器,保证系统能够精确控制机械手的各项动作。
4. 电气线路:设计合理的电气线路,确保信号传输的可靠性和稳定性。
软件设计液压机械手PLC控制系统的软件设计包括以下方面:1. PLC程序设计:使用PLC编程软件,根据机械手的运动逻辑和控制要求,编写PLC程序,实现各项功能。
2. 信号处理:对传感器采集的信号进行处理和分析,以获取机械手的状态信息。
3. 控制算法:设计合理的控制算法,根据机械手的控制需求,实现位置控制、速度调节等功能。
4. 用户界面:设计友好的用户界面,方便操作人员对机械手进行参数设置和监控。
系统测试与调试设计完成后,需要进行系统测试与调试,以验证系统的功能和性能:1. 单元测试:对各个模块进行单元测试,确保其功能正常。
2. 组装测试:将各个模块组装成完整的系统,对整个系统进行综合测试。
3. 调试优化:根据测试结果进行系统调试和优化,确保系统的稳定性和性能满足设计要求。
液压机械手液压系统设计

液压机械手液压系统设计
1.动力源选择:液压机械手主要使用液压泵作为动力源。
选择合适的液压泵需要考虑机械手的工作负荷、速度和精度要求。
通常选用可调节排量液压泵以满足工作要求。
2.液压油箱设计:液压油箱作为液压系统的储油和冷却装置,需要具备足够的容量以确保回油顺利、油液冷却和过滤。
油箱还需要考虑油温控制和油液监测装置的设计。
3.液压阀的选型:液压阀是控制液压流动和压力的重要装置,常见的液压阀有单向阀、溢流阀、换向阀等。
液压机械手液压系统设计需要根据运动控制要求选择合适的液压阀。
使用可调节溢流阀可以实现对液压机械手的速度和力矩的精确控制。
4.液压缸设计:液压缸是液压机械手的执行元件,通过液压力来驱动机械手的运动。
液压缸的设计需要考虑缸径、活塞杆直径、行程和最大推力等因素。
合理设计液压缸可以提高机械手的运动速度和精度。
5.液压管路设计:液压管路是液压系统的动力传递和控制通道。
设计合理的液压管路可以减小压力损失和泄漏,并保证液压系统的可靠运行。
液压管路的设计需要考虑液压流量、工作压力和管道材料选择等因素。
6.液压系统控制:液压机械手的运动和工作需要通过液压系统来进行控制。
可以采用手动控制、自动控制或者PLC控制来实现对液压机械手的控制。
控制方式的选择需要根据机械手的工作环境和要求来确定。
以上仅为液压机械手液压系统设计的一些主要考虑因素,具体的设计还需要根据机械手的具体要求和工作条件进行详细的分析和计算。
液压机
械手液压系统设计的目标是实现机械手的高效、精确和可靠的运动和工作,提高生产效率和产品质量。
液压机械手液压系统设计
第4章机械手液压系统设计4.1机械手的工作原理分析液压自动上下料机械手是自动化流水生产线中广泛应用的工件搬运机械设备,它是流水线作业中不可或缺的运输单元。
按其工作介质是油还是水(乳化液),液压机可分为油压机和水压机两种,以油为介质的液压机械手。
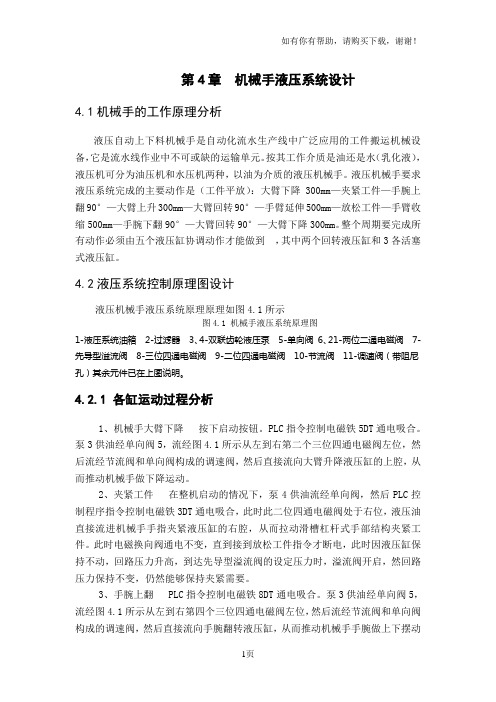
液压机械手要求液压系统完成的主要动作是(工件平放):大臂下降300mm—夹紧工件—手腕上翻90°—大臂上升300mm—大臂回转90°—手臂延伸500mm—放松工件—手臂收缩500mm—手腕下翻90°—大臂回转90°—大臂下降300mm。
整个周期要完成所有动作必须由五个液压缸协调动作才能做到,其中两个回转液压缸和3各活塞式液压缸。
4.2液压系统控制原理图设计液压机械手液压系统原理原理如图4.1所示图4.1 机械手液压系统原理图1-液压系统油箱2-过滤器3、4-双联齿轮液压泵5-单向阀6、21-两位二通电磁阀7-先导型溢流阀8-三位四通电磁阀9-二位四通电磁阀10-节流阀11-调速阀(带阻尼孔)其余元件已在上图说明。
4.2.1 各缸运动过程分析1、机械手大臂下降按下启动按钮。
PLC指令控制电磁铁5DT通电吸合。
泵3供油经单向阀5,流经图4.1所示从左到右第二个三位四通电磁阀左位,然后流经节流阀和单向阀构成的调速阀,然后直接流向大臂升降液压缸的上腔,从而推动机械手做下降运动。
2、夹紧工件在整机启动的情况下,泵4供油流经单向阀,然后PLC控制程序指令控制电磁铁3DT通电吸合,此时此二位四通电磁阀处于右位,液压油直接流进机械手手指夹紧液压缸的右腔,从而拉动滑槽杠杆式手部结构夹紧工件。
此时电磁换向阀通电不变,直到接到放松工件指令才断电,此时因液压缸保持不动,回路压力升高,到达先导型溢流阀的设定压力时,溢流阀开启,然回路压力保持不变,仍然能够保持夹紧需要。
3、手腕上翻 PLC指令控制电磁铁8DT通电吸合。
泵3供油经单向阀5,流经图4.1所示从左到右第四个三位四通电磁阀左位,然后流经节流阀和单向阀构成的调速阀,然后直接流向手腕翻转液压缸,从而推动机械手手腕做上下摆动运动。
液压机械手毕业设计
液压机械手毕业设计液压机械手毕业设计在现代工业制造中,机械手是不可或缺的一部分。
机械手的出现使得生产线的自动化程度大大提高,极大地减少了人力成本,提高了生产效率。
而液压机械手则是机械手中的一种重要类型,它利用液压系统来实现运动控制,具有较高的精度和可靠性。
本文将探讨液压机械手的设计和应用。
一、液压机械手的工作原理液压机械手的工作原理主要是利用液压系统来控制机械手的运动。
液压系统由液压泵、液压缸、液压阀等组成,通过液压泵将液压油送入液压缸,使得液压缸产生推力,从而驱动机械手的运动。
液压阀则用于控制液压油的流向和压力,实现机械手的精确控制。
二、液压机械手的设计要点1. 结构设计液压机械手的结构设计要考虑到机械手的工作环境和工作负荷。
机械手的结构应该具有足够的刚度和强度,能够承受工作负荷和外界干扰。
同时,结构设计还应考虑到机械手的灵活性和可调性,以适应不同的工作需求。
2. 控制系统设计液压机械手的控制系统设计是实现机械手运动控制的关键。
控制系统应包括传感器、执行器、控制器等组成,能够实时感知机械手的位置和状态,并根据需求进行相应的控制。
控制系统的设计要考虑到机械手的运动范围、速度和精度等要求,以实现准确的运动控制。
3. 安全设计液压机械手在工作时可能存在一定的安全风险,因此安全设计是不可忽视的一部分。
安全设计应包括机械手的防护装置、紧急停止装置等,以确保操作人员的安全。
此外,还应考虑到机械手的自故障检测和自动报警功能,及时发现并解决潜在问题。
三、液压机械手的应用领域液压机械手在工业制造中有广泛的应用。
它可以用于装配生产线上的零部件组装,提高装配效率和一致性。
同时,液压机械手还可以用于物料搬运、堆垛和包装等工作,减少人工操作,提高生产效率。
此外,液压机械手还可以应用于危险环境下的作业,如核电站、化工厂等,减少人员的风险。
四、液压机械手的发展趋势随着科技的不断进步,液压机械手也在不断发展。
未来,液压机械手将更加智能化和自动化,具备更高的灵活性和自适应性。
机械手控制系统的设计方案
机械手控制系统的设计方案液压传动控制是工业中经常用到的一种控制方式,它采用液压完成传递能量的过程。
因为液压传动控制方式的灵活性和便捷性,液压控制在工业上受到广泛的重视。
液压传动是研究以有压流体为能源介质,来实现各种机械和自动控制的学科。
液压传动利用这种元件来组成所需要的各种控制回路,再由若干回路有机组合成为完成一定控制功能的传动系统来完成能量的传递、转换和控制。
图1.1液压传动示意图液压传动中所需要的元件主要有动力元件、执行元件、控制元件、辅助元件等。
其中液压动力元件是为液压系统产生动力的部件,主要包括各种液压泵。
液压泵依靠容积变化原理来工作,所以一般也称为容积液压泵。
齿轮泵是最常见的一种液压泵,它通过两个啮合的齿轮的转动使得液体进行运动。
其他的液压泵还有叶片泵、柱塞泵,在选择液压泵的时候主要需要注意的问题包括消耗的能量、效率、降低噪音。
1.1 选择液压元件(1)液压缸液压缸是液压系统的执行元件,它的职能是将液压能转换成机械能。
液压缸的输入量是液体的流量和压力,输出量是直线速度和力。
液压缸的活塞能完成往复直线运动,输出有限的直线位移。
1、液压缸的工作原理.若缸筒固定,左腔连续的输入压力油,当油的压力足以克服活塞杆上的所有负载时,活塞以一定速度v 连续向右运动,活塞杆对外界做功。
反之,往右腔输入压力油时,活塞以速度v 向左运动,活塞杆也对外界做功。
这样,完成了一个往复运动。
这种液压缸叫做缸筒固定缸。
若活塞杆固定,左腔连续地输入压力油时,则缸筒向左运动。
当往右腔连续地通入压力油时,则缸筒右移。
这种液压缸叫活塞杆固定缸。
2、液压缸的分类为了满足各种主机的不同用途,液压缸有多种类型。
按供油方向分,可分为单作用缸和双作用缸。
单作用缸只是往缸的一侧输入高压油,靠其它外力使活塞返回回程。
双作用缸则分别向缸的两侧输入压力油,活塞的正反向运动均靠液压力完成。
按结构形式分,可分为活塞缸、柱塞缸、摆动缸和伸缩式套筒缸。
冲压机械手的设计
冲压机械手的设计概述冲压机械手是一种常用于工业生产中的自动化设备,它主要用于操作和搬运金属板材、零件以及产品。
冲压机械手的设计要考虑到工作环境、工作负荷、精确度和平安等因素,以实现高效、稳定和平安的生产。
结构设计冲压机械手的结构设计是整个设计过程中的关键环节。
常见的冲压机械手结构包括固定式、G型、C型和直角型等。
其中,G型和C型的结构广泛应用于冲压机械手设计中。
G型结构G型结构的冲压机械手由立柱、臂架、五连杆和末端执行器组成。
立柱支撑着臂架,臂架通过旋转装置和传动装置实现左右摆动和上下抬升的动作。
五连杆通过旋转装置和传动装置连接臂架和末端执行器,实现末端执行器的运动控制。
G型结构的冲压机械手具有结构简单、稳定性好和运动速度快的特点。
适用于中小型负荷的冲压工作。
C型结构C型结构的冲压机械手由定框、运动架和末端执行器组成。
定框固定在机床或工作台上,运动架通过传动装置实现前后滑动和上下抬升的动作。
末端执行器通过传动装置连接运动架,实现末端执行器的运动控制。
C型结构的冲压机械手具有结构紧凑、尺寸小和能耗低的特点。
适用于小型高速冲压工作。
动作控制冲压机械手的动作控制是保证冲压工作稳定和精确度的关键。
动作控制可通过控制系统、传感器和执行器实现。
控制系统控制系统通常采用PLC〔可编程逻辑控制器〕或CNC〔数控系统〕来实现对冲压机械手的控制。
控制系统能够根据工艺要求预先编程,并进行监控和诊断,确保冲压工作的稳定性和平安性。
传感器传感器主要用于检测冲压机械手的位置、速度和力量等参数。
常见的传感器包括光电传感器、接触传感器和压力传感器等。
传感器能够实时监测机械手的状态,并提供反响信号给控制系统进行调整。
执行器是冲压机械手的关键组成局部,它包括电动执行器和液压执行器。
电动执行器通过电动机驱动,实现机械手的运动。
液压执行器那么通过液压系统传递液压力量,实现机械手的运动。
执行器的选取要考虑到工作负荷、速度和精确度等因素。
旋转冲压机械手及其自动控制系统的设计
中图分类号 : T H1 6 ; T P 2 4 1 . 2
文献标识码 : A
文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 1 1 - 0 1 9 0 — 0 3
De s i g n o f Ro t a t i o n a l Di s p l a c e me n t St a mp i n g Ma n i p u l a t o r a n d
r e l i bl a e . B e c a se u m e t a l s t mp a i n g i n d st u r e i s c a n p r o d ce u o t h e r p r o d ct u s o r m o d i f y t h e p r o d u c t i o n p r o c e s s s i m p l y b y r e p l ci a n g t h e o r i g i n a l m o l d . r o b o t s o n l y n e e d t o d e v e l o p n e wf o , 1 o fg r i p p e r t h a t a d a p t t o t h e n e w w o r k p e i c e . a n d t h e c o n t r o l s y s t e m c a n b e b si a c a l l y u n c h ng a e d nd a t h s u i n c o mm o n se u , s o t h e s e t fc o o n t r o l s y s t e m c a r t i m p r o v e t h e p r o d ct u r e p l ce a m e n t r a e t nd a ma i n t i a n t h e p r o d ct u l e de a r s h i p p o s i t i o n i n t h e m a r k e t . A l l t h e s e m a k e i t e x t r e m e l y i m p o r t a n t f o r t h e i n d u s t y r .
冲压机械手的设计说明
学士学位论文冲压机械手的设计姓名:学号:指导学院:专业:完成日期:学士学位论文冲压机械手的设计姓名:学号:指导学院:专业:完成日期:基于PLC的台式钻床控制系统改造及其进给系统设计摘要冲压机械手是在自动化设备的基础之上,根据现实生产中冲压的实际特点,专门为实现无人生产而研发的机械设备,有利于企业提高整条生产效率。
本文在收集有关机械手方面的资料之后,对掌握的资料进行分析,能以一种快捷的途径完成该课题的研究。
根据对机械手手部、腕部、手臂以及机身计算得出的数据,通过三维软件进行运动状态的模拟仿真,最后对机械手的设计过程进行完善。
同时本文还介绍了机械手的作用,机械手的组成和分类,以及讨论磁吸式机械手的设计理论与方法。
着重说明了它四个部分的结构设计。
通过学习冲压机械手的工作原理,从而了解磁吸式机械手的运动机理。
磁吸式的结构能够适合生产需要的冲压机械手,在实际生产中可以完成预期的作业,本文设计的是磁吸式的结构,因而与通用机械手相比,它结构简单,成本低廉,专用性和实用性较高,能够实现车间的某些搬运与装配工作。
[关键词]冲压机械手限位开关电磁铁齿轮齿条机身AbstractStampingmachine handison the basis ofautomation equipment,according to the actualcharacteristics of stampingproduction reality,specifically for the realization of unmanned productionand R & Dof mechanical equipment,which is beneficial to theimprovement ofthe whole productionefficiency.Afterthedatacollected on the manipulator hand,it can complete thestudy of subjectin afast way and carry on the analysis tothe data.According to themechanicalhand,wrist,arm and thecalculated data,and simulate themotion stateby 3Dsoftware,thedesign process of themanipulatoris good. At the same time,this paperalso introducesthe role of manipulator, manipulator of the composition and classification,anddiscussesthe design theory and method ofmagneticmanipulator.It emphasizes itsfour part structuredesign.The principle oflearningthe stampingof the manipulator,so as to understand themechanism ofmagneticmanipulator.Magneticstructureis suitable forpunchingmachine hand production needs,in the actual production,itis expected to be completedhomework,this design is themagneticstructure,compared withgeneralmanipulator,which has the advantages of simple structure,low cost,specificity andhigh practicability,it can bethe realcarinsomehandlingandassembly work.[keywords] Stamping machine hand limit switch electromagnet Gear rack Body目录第1章绪论1.1前言 (1)1.2 发展史 (2)1.3 应用 (3)1.4 组成结构 (4)1.4.1执行机构 (4)1.4.2驱动机构 (5)1.5发展趋势 (5)1.6研究容 (6)1.7本章小结 (6)第2章总体设计方案2.1 运动部件 (6)2.2 驱动机构 (6)2.3本章小结 (7)第3章机械手手部的设计计算3.1工件尺寸 (7)3.2.手抓的设计 (7)3.2..1类型选择 (7)3.2.2手抓受力分析 (7)3.3 电磁铁 (7)3.3.1简介 (7)3.3.2分类 (8)3.4 限位开关 (9)3.5 本章小结 (9)第4章腕部的设计计算4.1设计要求 (9)4.2 结构设计 (10)4.3小结 (10)第5章手臂的设计5.1基本要求 (10)5.2 臂部结构 (10)5.2.1典型机构 (10)5.2.2机构的选择 (11)5.3 本章小结 (11)第6章机身的设计6.1整体结构 (11)6.2传动系统的设计 (12)6.2.1 轴的设计 (12)6.2.2 v带传动 (13)6.2.3 v带带轮的设计 (15)6.2.4 齿轮齿条 (15)6.2.5 键的设计 (19)6.2.6 滚动轴承 (21)6.3 总结 (22)第7章机械手设计总结参考文献 (22)致 (23)1绪论1.1 前言早在20世纪初,随着机床、汽车等制造业的发展就出现了机械手。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1.绪论 (2)2.设计任务 (3)3.液压原理图的设计 (4)4.液压元件的选择 (8)5.PLC选型 (14)6.I/O分配 (17)7.梯形图的设计 (18)8.指令语句程序 (28)9.Bom表 (34)10.总结 (35)11.参考文献 (36)绪论机械手是近几十年发展起来的一种高科技自动化生产设备。
通过编程来完成各种动作,它的准确性和多自由度,保证了机械手能在各种不同的环境中工作。
机械手在工业生产中应用较多,机械手的使用能够显著提高生产效率,减少人为因素造成的废次品率。
机械手可以完成很多工作,它在自动化车间中用来运送物料,从事多种工艺操作。
它的特点是通过编程来完成各种预期的作业,在构造和性能上兼有人和机器人的部分优点,尤其体现了人的灵活协调和机器人的精确到位。
机械手是在机械自动化生产中逐步发展出的一种新型装置。
现代生产过程中机械手被广泛的应用到自动生产线中。
机械手目前虽然不如人手的灵活多变,但它具有重复性,无疲劳,不惧危险,有大的抓举力量,因此越来越多的被广泛运用。
机械手技术涉及机械学、力学、自动控制技术、传感技术、电气液压技术,计算机可编程技术等,是一门跨学科综合技术。
本课题在执行机构由电动和液压组成的结构基础上将PLC 应用于其自动控制系统,完成机械手系统的硬件及软件设计。
2.设计任务2.1动作分析根据生产条件要求,机械手须把加工原料从输送带上取下,旋转一定角度后将加工原料放入冲压机填料口,然后返回,重复这一动作。
2.2构的工步插销定位—手臂前伸—手指抓料—手臂上升—手臂缩回—拔定位销—手腕回转、手臂回转—插定位销—手臂前伸—手臂下降—手指松开、手臂缩回—拔定位销—手腕回转、手臂回转—插定位销。
手腕回转液压马达手臂回转液压马达G=1000N手臂升降液压缸手臂伸缩液压缸定位液压缸手指夹紧液压缸图2-1冲压机械手结构示意图3.原理图的设计3.1根据设计要求,画出下图机械手液压系统原理图,如下图3-1图3-11液压系统原理图3.2压系统电磁铁动作顺序表按照电磁铁动作顺序要求绘制出如下表3-1表3-13.3系统工作原理1、插定位销(1+Y、12+Y)按下油泵起动按钮后,双联叶片泵1、2同时供油,电磁铁1Y、2Y带电,油液经溢流阀3和4至油箱,机械手处于待料卸荷状态。
当棒料到达待上料位置,启动程序动作。
电磁铁1Y带电,2Y不带电,使泵1继续卸荷,而泵2停止卸荷,同时12Y通电。
进油路:泵2→阀6→减压阀8→阀9→阀25(右)→定位缸左腔。
此时,插定位销以保证初始位置准确。
定位缸没有回油路,它是依靠弹簧复位的。
2、手臂前伸(5+Y、12+Y)插定位销后,此支路系统油压升高,使继电器K26发讯,接通电磁铁5Y,泵1和泵2经相应的单向阀汇流到电液换向阀14左位,进入手臂伸缩缸油腔。
进油路:泵1→单向阀5→阀14(左)→手臂伸缩缸右腔泵2→阀6→阀7→↑回油路:手臂伸缩缸左腔→单向调速阀15→阀14(左)→油箱3、手指张开(1+Y、9+Y、12+Y)手臂前伸至适当位置,行程开关发讯,电磁铁1Y、9Y带电,泵1卸载,泵2供油,经单向阀6电磁阀20左位,进入手指夹紧缸右腔。
回油路从左腔通过液控单向阀21及阀20左位进入油箱。
进油路:泵2→阀6→电磁阀20(左)→手指夹紧缸右腔回油路:手指夹紧缸左腔→阀21→电磁阀20(左)→油箱4、手指抓料(1+Y、12+Y)手指张开后,时间继电器延时。
待棒料由送料机构送到手指区域时,继电起器发讯使9Y断电,泵2的压力油通过阀20的右位进入缸的左腔,使手指夹紧棒料。
进油路:泵2→阀6→阀20(右)→阀21→手指夹紧缸左腔回油路:手指夹紧缸右腔→阀20(右)→油箱5、手臂上升(3+Y、12+Y)当手指抓料后,手臂上升。
此时,泵1和泵2同时供油到升降缸。
主油路为:进油路:泵1→单向阀5→阀10(左)→阀11→阀12→手臂升降缸下腔泵2→阀6→阀7→↑回油路:手臂升降缸上腔→阀13→阀10(左)→油箱6、手臂缩回(6+Y、12+Y)手臂上升至预定位置,碰行程开关,3Y断电,电液换向阀10复位,6Y带电。
泵1和泵2一起供油至电液换向阀14右端,压力油通过单向调速阀15进入伸缩缸左腔,而右腔油液经阀14右端回油箱。
进油路:泵1→阀5→阀14(右)→阀15→手臂伸缩缸左腔泵2→阀6→阀7→↑回油路:手臂伸缩缸右腔→阀14(右)→油箱7、手腕回转(1+Y、10+Y、12+Y)当手臂上的碰块碰到行程开关时,6Y断电,阀14复位,1Y、10Y通电。
此时,泵2单独供油至阀22左端,通过阀24进入手腕回转油缸,使手腕回转︒180。
进油路:泵2→阀6→阀22(左)→阀24→手腕回转缸回油路:手腕回转缸→阀23→阀22(左)→油箱8、拔定位销(1+Y)当手腕上的碰块碰到行程开关时,10Y、12Y断电,阀22、25复位,定位缸油液经阀25左端回油箱,弹簧作用拔定位销。
回油路:定位缸左腔→阀25(左)→油箱定位缸没有进油路,它是在弹簧作用下前进的。
9、手臂回转(1+Y、7+Y)定位缸支路无油压后,压力继电器K26发讯,接通7Y。
泵2的压力油进入阀6经换向阀16左端通过单向调速阀18最后进入手臂回转缸,使手臂回转︒95。
进油路:泵2→阀6→换向阀16(左)→单向调速阀18→手臂回转缸回油路:手臂回转缸→单向调速阀17→换向阀16(左)→行程节流阀19→油箱10、插定位销(1+Y、12+Y)当手臂回转碰到行程开关时,7Y断电,12Y重又通电,插定位销同1。
11、手臂前伸(5+Y、12+Y)此时的动作顺序同7。
12、手臂中停(12+Y)当手臂前伸碰到行程开关后,5Y断电,伸缩缸停止动作,确保手臂将棒料送到准确位置处,“手臂中停”等主机夹头夹紧棒料,夹头夹紧棒料后,时间继电器发讯。
13、手指张开(1+Y、9+Y、12+Y)接到继电器信号后,1Y、9Y通电,手指张开同3。
并启动时间继电器延时,主机夹头移走棒料后,继电器发讯。
14、手指闭合(1+Y、12+Y)接继电器信号,9Y断电,手指闭合同4。
15、手臂缩回(6+Y、12+Y)当手指闭喝后,1Y断电,使泵1和泵2一起供油,同时6Y通电,其动作顺序同6。
16、手臂下降(4+Y、12+Y)手臂缩回碰到行程开关,6Y断电,4Y通电。
此时,电液换向阀10右端动作,压力油经阀10和单向调速阀13进入升降缸上腔。
进油路:泵1→单向阀5→阀10(右)→阀13→手臂升降缸上腔泵2→阀6→阀7→↑回油路:手臂升降缸下腔→阀12→阀11→阀10(右)→油箱17、手腕反转(1+Y、11+Y、12+Y)当升降导套上的碰铁碰到行程开关时,4Y断电,1Y、11Y通电。
泵2供油至阀22右端,压力油通过单向调速阀23进入手腕回转缸的另一腔,并使手腕反转︒180。
进油路:泵2→阀6→阀22(右)→单向调速阀23→手腕回转缸回油路:手腕回转缸→单向调速阀24→阀22(右)→油箱18、拔定位销(1+Y)手腕反转碰到行程开关后,11Y、12Y断电。
动作顺序同8。
19、手臂反转(1+Y、8+Y)拔定位销,压力继电器发信号,8Y接通。
换向阀16右端动作,压力油进入手臂回转缸的另一腔,手臂反转︒95,机械手复位。
进油路:泵2→阀6→换向阀16(右)→单向调速阀17→手臂回转缸回油路:手臂回转缸→单向调速阀18→换向阀16(右)→行程节流阀19→油箱20、待料卸载(1+Y、2+Y)手臂反转到位后,启动行程开关,8Y断电,2Y接通。
此时,两油泵同时卸荷。
机械手动作循环结束,等待下一个循环。
4.液压元件的选择与计算4.1执行元件液压缸、液压马达4.1.1手指夹紧缸∵∑Y=0∴2f—G=0N又N f =μN ∴N=μ2G =1.021000⨯=5000N ∵∑M(o)=0 ∴N '×2a —F 2×22a=0 ∴F 2=2 N '=2×5000=10000N 又Φ=12V V =21F F =1.33 ∴F 1=13300N ∵D=P F π4=10133004⨯⨯π=41.15mm 根据液压行业技术标准,圆整为40mm.,查《机械设计手册》P 28617-选HSG 型液压缸。
4.1.2手腕回转缸当手指夹着工件,手腕旋转时,液压缸需克服的摩檫力矩最大。
M f =f ×r=r G 'μ=0.1×1500×0.1=15NM查《机械设计手册》20417-P 选CM-C10C 型液压马达。
4.1.3手臂伸缩缸F=f=G μ=0.1×2000=200N ∴D=P F π4 =42004⨯⨯π =8.4mm 根据液压行业技术标准,圆整为10mm.,查《机械设计手册》P 28617-选HSG 型液压缸。
4.1.4手臂升降缸D=P F π4=440004⨯⨯π=35.7mm 根据液压行业技术标准,圆整为40mm.,查《机械设计手册》P 28617-选HSG 型液压缸。
4.1.5手臂回转缸当手指夹着工件,手臂旋转时,液压缸需克服的摩檫力矩最大。
M f =f ×r=r G 'μ=0.1×4500×0.05=22.5NM查《机械设计手册》20417-P 选CM-C18C 型液压马达。
4.1.6定位缸f=G μ=0.1×5000=500N D=P F π4 =pf π4 =45004⨯⨯π=12.6mm 根据液压行业技术标准,圆整为20mm.,查《机械设计手册》P 28617-选HSG 型液压缸。
液压缸计算结果:液压马达计算结果:4.2动力元件——液压泵液压泵是标准件,其选择依据是额定压力和流量。
4.2.1小泵当手臂回转、手腕回转、手指松紧及定位缸工作时,只有小流量泵供油。
手臂回转时,液压马达的额定压力为10MPa ,流量为t q =nV=1800×18.2=32.8L/min手腕回转时,液压马达的额定压力为10 MPa ,流量为t q =nV=1800×10.9=19.6L/min手指松紧时,液压缸的工作压力为10 MPa ,流量为t q = A 1m ax V =4π2D ×m ax V =4π×204.0×3×310=3.76L/min 定位缸工作时, 液压缸的工作压力为4 MPa ,流量为t q = A 1m ax V =4π2D ×m ax V =4π×0.022×3×310=0.94L/min 实际流量:p q =1K ×m ax q =1.1×32.8=36.08L/min 实际压力:p p =2K ×max p =1.1×10=11 MPa 查《机械设计手册》13017-p 选CB-30型液压泵。