检测系统静态特性方程与特性曲线
合集下载
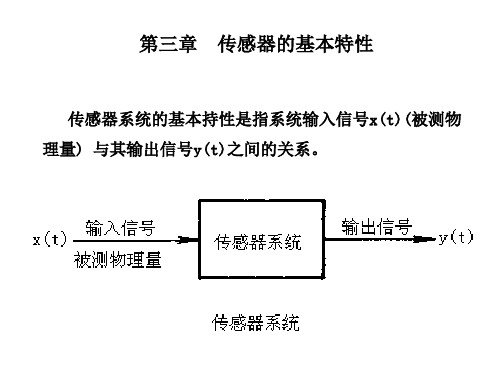
第三章 传感器的静态特性和动态特性讲解
例1:一阶传感器的频率响应,系统输入量(压力) F 为F(t)= b0 x(t ),输出 量为位移y( t ),不考虑运动。
解:①列出微分方程
a1
dy dt
a0
y
b0
x
②作拉普-拉斯变换
Y (S )(a1S a0 ) b0 X (S )
③令H(S )中的S =jω,即σ= 0
H ( j ) Y (S ) b0 X (S ) ja1 a0
ΔLj=(b+kxj)-yj
均方差函数为: 取其极小值,有:
4)总精度 系统的总精度由其量程范围内的基本误差与满度值Y(FS)之
比的百分数表示。基本误差由系统误差与随机误差两部分组成, 迟滞与线性度所表示的误差为系统误差,重复性所表示的误差 为随机误差。
总精度一般可用方和根来表示,有时也可用代数和表示。
统示值范围上、下限之差的模。当输入量在量程范围以内 时,系统正常工作并保证预定的性能。
对于4-20mA标准信号,零位值 yo=so=4mA,上限值 yfs=20mA,量 程 y(FS)=16mA。
3)灵敏度 S 输出增量与输入增量的比值。即
① 纯线性传感器灵敏度为常数:S=a1。
② 非线性传感器灵敏度S与x有关。
4)分辨率
在规定的测量范围内,传感器所能检测出输入量 的最小变化值。有时用相对与输入的满量程的相对 值表示。即
2、静态特性的性能指标
1) 迟滞现象(回差EH )
回差EH 反映了传感器的输 入量在正向行程和反向行程全 量程多次测试时,所得到的特 性曲线的不重合程度。
2) 重复性 Ex (不重复性) 重复性 Ex 反映了传感器在输入量按同一方向(增或减)全
第2讲 测试系统及其基本特性(静态、动态1)

γ m = Δx / x m × 100%
仪表的准确度等级和基本误差
例:某指针式电压表的精度为 2.5级,用它来测量电压时可能产 生的满度相对误差为2.5% 。
例:某指针式万用 表的面板如图所 示,问:用它来测 量直流、交流 (~)电压时,可 能产生的满度相对 误差分别为多少?
例:用指针式万用表 的10V量程测量一只 1.5V干电池的电压, 示值如图所示,问: 选择该量程合理吗?
(m/s)、物位、液位h(m) m/s)、
机械量 (第4、5、6、7、10章) 10章
• 直线位移x(m)、角位移α、速度、加速度a
( m/s2) 、转速n(r/min)、应变 ε (μm/m )、力矩 m/s2) r/min)、 T(Nm)、振动、噪声、质量(重量)m(kg、t) Nm)、 kg、
3、测量误差及分类
绝对误差:
Δ=Ax-A0
(1-1)
某采购员分别在三家商店购买100kg大 米、10kg苹果、1kg巧克力,发现均缺少约 0.5kg,但该采购员对卖巧克力的商店意见 最大,是何原因?
相对误差及精度等级
几个重要公式: γ A = Δx / A × 100%
γ x = Δx / x × 100%
测量范围
x
实际总是用定度曲线的拟合直线的斜率作为该装置的灵敏 度。
Δy S= Δx
灵敏度的单位取决于输入、输出量的单位 Ⅰ 当输入输出量纲不同时,灵敏度是有量纲的 量; Ⅱ 当输入输出量纲相同时,灵敏度是无量纲的 量。此时的灵敏度也称为“放大倍数”或“放大比”。
例 位移传感器,位移变化1mm时,输出电压变化为 300mV,求系统的灵敏度。
几何量(第10章) 10章
• 长度、厚度、角度、直径、间距、形状、粗糙度、硬
仪表的准确度等级和基本误差
例:某指针式电压表的精度为 2.5级,用它来测量电压时可能产 生的满度相对误差为2.5% 。
例:某指针式万用 表的面板如图所 示,问:用它来测 量直流、交流 (~)电压时,可 能产生的满度相对 误差分别为多少?
例:用指针式万用表 的10V量程测量一只 1.5V干电池的电压, 示值如图所示,问: 选择该量程合理吗?
(m/s)、物位、液位h(m) m/s)、
机械量 (第4、5、6、7、10章) 10章
• 直线位移x(m)、角位移α、速度、加速度a
( m/s2) 、转速n(r/min)、应变 ε (μm/m )、力矩 m/s2) r/min)、 T(Nm)、振动、噪声、质量(重量)m(kg、t) Nm)、 kg、
3、测量误差及分类
绝对误差:
Δ=Ax-A0
(1-1)
某采购员分别在三家商店购买100kg大 米、10kg苹果、1kg巧克力,发现均缺少约 0.5kg,但该采购员对卖巧克力的商店意见 最大,是何原因?
相对误差及精度等级
几个重要公式: γ A = Δx / A × 100%
γ x = Δx / x × 100%
测量范围
x
实际总是用定度曲线的拟合直线的斜率作为该装置的灵敏 度。
Δy S= Δx
灵敏度的单位取决于输入、输出量的单位 Ⅰ 当输入输出量纲不同时,灵敏度是有量纲的 量; Ⅱ 当输入输出量纲相同时,灵敏度是无量纲的 量。此时的灵敏度也称为“放大倍数”或“放大比”。
例 位移传感器,位移变化1mm时,输出电压变化为 300mV,求系统的灵敏度。
几何量(第10章) 10章
• 长度、厚度、角度、直径、间距、形状、粗糙度、硬
检测系统的基本特性

第2章 检测系统的基本特性
2.1 静态特性及性能指标
2.1.1 检测系统的静态特性 静态测量和静态特性 :
静态测量:测量过程中被测量保持恒定不变(即 dx/dt=0系统处于稳定状态)时的测量。
静态特性:在静态测量中,检测系统的输出-输入 特性。
y a0 a1 x a2 x a3 x an x
特性:
H ( s) H ( j ) K ( ) e j ( )
s j
2018/9/4
16
2.2.1 检测系统的传递函数 1.零阶系统 系统方程:
a0 y b0 x
H ( s) K 0 H ( j ) K 0
0
或 y K0 x
传递函数:
频率特性:
幅频特性:K () K 相频特性: ( ) 0
2018/9/4
12
理论方法是根据检测系统的数学模型,通过求解微分方程来 分析其输出量与输入量之间的关系。 常用实验的方法: 频率响应分析法――以正弦信号作为系统的输入; 瞬态响应分析法――以阶跃信号作为系统的输入。
2018/9/4
13
2.2.1 检测系统的传递函数
检测系统的理想动态特性要求:当输入量随时间变化 时,输出量能立即随之无失真的变化。但实际的传感器总
或
1
0 2
式中:
d 2 y 2 dy 2 y K0 x 0 dt dt
b0 ; a0
a0 ; a2
K0------系统的静态灵敏度,K 0 ω0------系统的固有角频率,0 ξ ------系统的阻尼比系数,
2018/9/4
a1 2 a0 a2
21
1
2.1 静态特性及性能指标
2.1.1 检测系统的静态特性 静态测量和静态特性 :
静态测量:测量过程中被测量保持恒定不变(即 dx/dt=0系统处于稳定状态)时的测量。
静态特性:在静态测量中,检测系统的输出-输入 特性。
y a0 a1 x a2 x a3 x an x
特性:
H ( s) H ( j ) K ( ) e j ( )
s j
2018/9/4
16
2.2.1 检测系统的传递函数 1.零阶系统 系统方程:
a0 y b0 x
H ( s) K 0 H ( j ) K 0
0
或 y K0 x
传递函数:
频率特性:
幅频特性:K () K 相频特性: ( ) 0
2018/9/4
12
理论方法是根据检测系统的数学模型,通过求解微分方程来 分析其输出量与输入量之间的关系。 常用实验的方法: 频率响应分析法――以正弦信号作为系统的输入; 瞬态响应分析法――以阶跃信号作为系统的输入。
2018/9/4
13
2.2.1 检测系统的传递函数
检测系统的理想动态特性要求:当输入量随时间变化 时,输出量能立即随之无失真的变化。但实际的传感器总
或
1
0 2
式中:
d 2 y 2 dy 2 y K0 x 0 dt dt
b0 ; a0
a0 ; a2
K0------系统的静态灵敏度,K 0 ω0------系统的固有角频率,0 ξ ------系统的阻尼比系数,
2018/9/4
a1 2 a0 a2
21
1
测试系统的静态特性

2.灵敏度
灵敏度是测试系统对被测量变化的反应能力,是反映系统特性的一个
基本参数。当系统输入x有一个变化量 x,引起输出y也发生相应的变化 量 y ,则输出变化量与输入变化量之比称为灵敏度,用S表示,即
S y x
在静态测量中,对于呈直线关系的线性系统,由公式得
S y b0 b x a0
在动态测量中,由于系统的频率特性影响,即使在适用的频率范围内, 系统的灵敏度也不相同。在实际工作中,常对适用频率范围内特性最为平 坦、具有代表性的频率点进行标定。
为了确定上述静态特性参数,通常用静态标准量作为输入,用实验 方法测出对应的输出量,这一过程称为静态标定。然后根据静态标定实 验数据求出拟合直线方程,并计算出各测得值与理论估计值(由拟合直 线方程计算得到)之间的偏差,由此即可求出静态特性参数值。
传感器与测试技术
精密度
精密度表示多次重复测量中,测量值彼此之间的重复性或分 散性大小的程度。它反映随机误差的大小,随机误差愈小,测量
测
值就愈密集,重复性愈好,精密度愈高。
试
正确度表示多次重复测量中,测量平均值与真值接近的程度。
系 统
正确度
它反映系统误差的大小,系统误差愈小,测量平均值就愈接近真
精
值,正确度愈高。
度
准确度
4.重复性
重复性表示输入量按同一 方向变化时,在全量程范围内 重复进行测量时所得到各特性 曲线的重复程度,如图所示。 一般采用输出最大不重复误差 Δ与满量程输出值A的百分比 来表示重复性,即
100%
A
y
A
O
x
重复性
重复性可反映测试系统的随机误差大小。
为了确保测量结果的准确可靠,要求测试系统的线性度好、灵敏度 高、滞后量和重复性误差小。实际上,线性度是一项综合性参数,滞后 量和重复性也都能反映在线性度上。因此,有关滞后量和重复性在动态 测量中的频率特性就不再作详细分析。
1.2系统静态特性
y 输出量的变化量 S x 输入量的变化量
aS S (T2 ) S (T1 ) 100% S (T1 ) T
系统静态特性
1.3 传感器系统动态特性与性能指标
对理想的传感器系统,输出与输入具有相同时间函数。
对于测量动态信号的测试系统,要求能够迅速而准确的测 出信号的大小并真实再现信号的波形变化,但是在实际系 统中,由于存在弹簧、阻尼、质量(惯性)等元件,只能 在一定频率范围内、对应一定动态误差条件下保持输出与 输入一致。
y=a0+a1x+a2x2+a3x3+…+anxn
式中:y—输出量; x—输入量; a0—零点输出; a1—理论灵敏度; a2、a3、 … 、 an—非线性项系数。
各项系数不同,决定了特性曲线的具体形式。
静态特性曲线可实际测试获得。在获得特性曲线 之后,可以说问题已经得到解决。但是为了标定和数 据处理的方便,希望得到线性关系。这时可采用各种 方法,其中也包括硬件或软件补偿,进行线性化处理。 常用的直线拟合方法有:理论拟合、端点连线 拟合、最小二乘拟合等。相应的有理论线性度、端 点连线线性度、最小二乘线性度等。实际中常用最 小二乘拟合直线。
相当于一个积分器。一阶系统适合测试缓变或低频被测
量。
L 20lg A( ) 0
20lg A / dB 0
-3 -10 -20 0.1/τ
1/τ
10/τ
b,当ω增大时,A( ) 减小,A
增大10倍, A( )减小20dB。
10 1 1 ,工作频率ω每 A 10
一阶系统频 率响应特性
任何高阶系统均可以视为多个一阶、二阶系统的并联或串联。
aS S (T2 ) S (T1 ) 100% S (T1 ) T
系统静态特性
1.3 传感器系统动态特性与性能指标
对理想的传感器系统,输出与输入具有相同时间函数。
对于测量动态信号的测试系统,要求能够迅速而准确的测 出信号的大小并真实再现信号的波形变化,但是在实际系 统中,由于存在弹簧、阻尼、质量(惯性)等元件,只能 在一定频率范围内、对应一定动态误差条件下保持输出与 输入一致。
y=a0+a1x+a2x2+a3x3+…+anxn
式中:y—输出量; x—输入量; a0—零点输出; a1—理论灵敏度; a2、a3、 … 、 an—非线性项系数。
各项系数不同,决定了特性曲线的具体形式。
静态特性曲线可实际测试获得。在获得特性曲线 之后,可以说问题已经得到解决。但是为了标定和数 据处理的方便,希望得到线性关系。这时可采用各种 方法,其中也包括硬件或软件补偿,进行线性化处理。 常用的直线拟合方法有:理论拟合、端点连线 拟合、最小二乘拟合等。相应的有理论线性度、端 点连线线性度、最小二乘线性度等。实际中常用最 小二乘拟合直线。
相当于一个积分器。一阶系统适合测试缓变或低频被测
量。
L 20lg A( ) 0
20lg A / dB 0
-3 -10 -20 0.1/τ
1/τ
10/τ
b,当ω增大时,A( ) 减小,A
增大10倍, A( )减小20dB。
10 1 1 ,工作频率ω每 A 10
一阶系统频 率响应特性
任何高阶系统均可以视为多个一阶、二阶系统的并联或串联。
测试系统的基本特性

测试系统
输出Y(t)
输入:x(t) x0e jt
an
d n y(t) dtn
a n1
d n1 y ( t ) d t n1
a1
dy(t) dt
a0 y(t)
输出:y(t) y0e j(t)
bm
d m x(t) dtm
bm 1
d m 1 x ( t ) d t m 1
含零点温漂和灵敏度温漂是测量系统在温度变化时其特性的变化灵敏度漂移力传感器温度传感器测试单元输入x输出y测试单元输出阻抗输入阻抗负载测试环节相互之间的影响输入阻抗与输出阻抗对于组成测量系统的各环节尤为重要希望前级输出信号无损失地向后级传送必须满足
第三章
测量系统的基本特性
本章内容
1. 测量系统的数学描述 2. 线性定常系统基本特性 3. 测量系统的静态特性 4. 测量系统的动态特性 5. 动态测量误差及补偿
d y(t) dt
t0 x ( t ) d t t0 y ( t ) d t
0
0
初始条件为零
2、线性定常系统的基本特性
2.3同频性:频率不变(频率保持性)
频率相同!
o 若输入为某一频率的简谐(正弦或余弦)信号
x(t) Ax cos( t x)
x(t) x0e jt
o 则系统的输出必是、也只是同频率的简谐信号
多次变动时,其输出值不一致的程度。 y
o 重复性误差定义为(引用误差):
Y
R
rR
.100% A
o ΔR是一种随机误差,根据标准差计算 0
R kˆ / n
△R-最大偏差
o K为置信因子,K=3时置信度为99.73%。 o 重复性误差决定测量结果的可信度。
3-2 测试系统的特性-静态与动态特性1

3.3 测试系统的动态特性
机械工程测试技术
h (t )
M 超调量
时域性能指标
允许误差 ±Δ
1.0 h(∞) 0.9 h(∞ )
td
0 .5 h(∞)
延 时 时 间
0.05或0.02
0.1 h(∞) 0
t r 上升 时间 t p 峰值时间 t s 调整时间
t
3.3 测试系统的动态特性
机械工程测试技术
本课程中研究的测试系统都是定常线性系统,可以 用常系数线性微分方程来描述该系统以及输入x(t)和 输出y(t)间的关系。
对于一个线性系统如何更有效的描述 装置的特性与输出、输入的关系?
利用微分方程来描述有许多不便。如果通过拉氏变换 建立与其相应的“传递函数”,通过傅氏变换建立与 其相应的“频率特性函数”,就可更简单、有效地描 述装置的动态特性和输出与输入之间的关系。
0.5
1
1.5
2
2.5
0
0.5
1
1.5 (c)
2
2.5
3
3 t
叠加特性示例
3.3 测试系统的动态特性
机械工程测试技术
b)比例性 常数倍输入所得的输出等于原输入所得输出的常 数倍,即 若 x(t) → y(t) , 则 kx(t) → ky(t)
10 5
20 10 mm 0 -10
0 0.5 1 1.5 (a) 2 2.5 3
y
Y ( s ) bm s m bm 1 s m 1 b1 s b0 H ( s) X ( s) an s n an 1 s n1 a1 s a0
H(s)与输入及系统的初始状态无关,只表达测试 系统的传输特性。对于具体系统,H(s)不会因输 入变化而不同,但对于任一具体输入都能确定地 给出相应的、不同的输出。
1.2系统静态特性

MTBF A= MTBF+MTTR
系统静态特性
1.3 检测系统动态特性与性能指标
对理想的测试系统,输出与输入具有相同时间函数。
对于测量动态信号的测试系统,要求能够迅速而准确的测 出信号的大小并真实再现信号的波形变化,但是在实际系 统中,由于存在弹簧、阻尼、质量(惯性)等元件,只能 在一定频率范围内、对应一定动态误差条件下保持输出与 输入一致。
传感器的输出输入关系或多或少地存在非线性。在 不考虑迟滞、蠕变、不稳定性等因素的情况下,其静态 特性可用下列多项式代数方程表示: y=a0+a1x+a2x2+a3x3+…+anxn 式中:y—输出量; x—输入量; a0—零点输出; a1—理论灵敏度; a2、a3、 … 、 an—非线性项系数。
各项系数不同,决定了特性曲线的具体形式。
A
L yFS H yFS R yFS
yFS
L H R
c)用不确定度表示: 测量不确定度即在规定的条件下测试系统或装置测 量所得结果不确定的程度,是测量误差极限估计值的评 价。不确定度越小,测量结果可信度越高,即精度越高。
量程选择应使测量值尽可能接近仪表的满刻度值,并尽 量避免让测量仪表在小于1/3量程范围内工作。
传递函数:
H s K 1 2 2 s s 1 2
0
频率特性:
0
H
K 2 1 2 j 2 0 0
F
m
y(t)
dy d2y F 向下 F 弹 F 阻 F ky b m 2 dt dt
b
k
Da
111 110 101 100 011 010
Da
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
检测系统静态特性方程与特性曲线
摘要: 一般检测系统的静态特性均可用一个统一(但具体系数各异)的代数方程,即静态特性方程来描述,表示检测系统对被测参量的输出与输入间的关系,即(1)式中,x 为输入量;y(x)为输出量;a0,a1,…,an
为常系数项...
一般检测系统的静态特性均可用一个统一(但具体系数各异)的代数方程,即静态特性方程来描述,表示检测系统对被测参量的输出与输入间的关系,即
(1)
式中,x 为输入量;y(x)为输出量;a0,a1,…,an 为常系数项。
如果方程(1)中除a0、a1 不为零外,其余各项常数均为零,这时式(1)就成为一个线性方程,对应的检测系统就是一个线性系统。
以输入量为横坐标,输出量为纵坐标,在直角平面坐标系中画出的静态特性曲线是一条直线。
如果方程(1)右边仅有一次项的系数a1 不为零而其余各项系数均为零,这时检测系统的静态特性曲线为过坐标原点的一条直线,对应的检测系。