中国机载雷达轨迹
经典雷达资料-第16章 机载动目标显示(AMTI)雷达-1
第16章机载动目标显示(AMTI)雷达FRED M. STAUDAHER16.1 采用AMTI技术的系统机载搜索雷达最初是为远程侦察机探测舰艇研制的。
第二次世界大战后期,美海军研制了几种机载预警(AEW)雷达,用来探测从舰艇雷达天线威力区之下飞近特遣舰队的低空飞机。
在增大对空和对海面目标的最大检测距离方面,机载雷达的优点是显而易见的,只要了解下述情况就很清楚了,高度为100ft的天线桅杆,其雷达视线距离只有12n mile,而与其相比,飞机高度为10 000ft时,雷达视线距离则为123n mile。
神风突击队袭击造成多艘哨舰的损失引起了机载自主探测与控制站的设想,后来这种系统发展成为一种用于洲际防空的边界巡逻机。
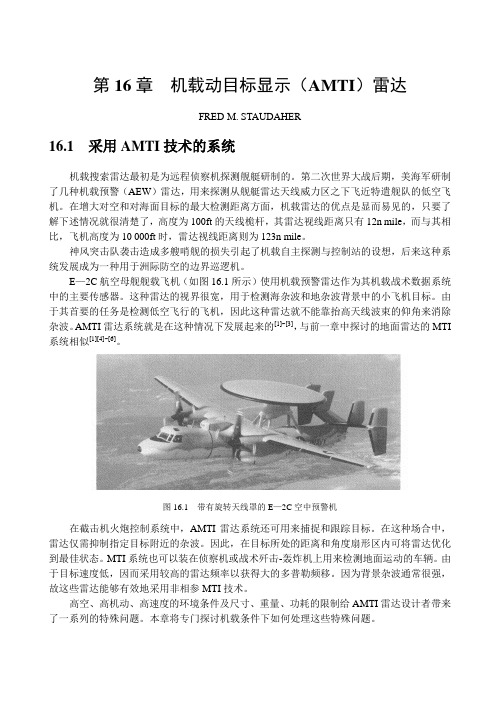
E—2C航空母舰舰载飞机(如图16.1所示)使用机载预警雷达作为其机载战术数据系统中的主要传感器。
这种雷达的视界很宽,用于检测海杂波和地杂波背景中的小飞机目标。
由于其首要的任务是检测低空飞行的飞机,因此这种雷达就不能靠抬高天线波束的仰角来消除杂波。
AMTI雷达系统就是在这种情况下发展起来的[1]~[3],与前一章中探讨的地面雷达的MTI 系统相似[1][4]~[6]。
图16.1 带有旋转天线罩的E—2C空中预警机在截击机火炮控制系统中,AMTI雷达系统还可用来捕捉和跟踪目标。
在这种场合中,雷达仅需抑制指定目标附近的杂波。
因此,在目标所处的距离和角度扇形区内可将雷达优化到最佳状态。
MTI系统也可以装在侦察机或战术歼击-轰炸机上用来检测地面运动的车辆。
由于目标速度低,因而采用较高的雷达频率以获得大的多普勒频移。
因为背景杂波通常很强,故这些雷达能够有效地采用非相参MTI技术。
高空、高机动、高速度的环境条件及尺寸、重量、功耗的限制给AMTI雷达设计者带来了一系列的特殊问题。
本章将专门探讨机载条件下如何处理这些特殊问题。
第16章机载动目标显示(AMTI)雷达·637·16.2 覆盖范围的考虑搜索雷达一般要求有360︒方位角覆盖。
无人机机载激光雷达在输电线路巡线中的应用

无人机机载激光雷达在输电线路巡线中的应用发布时间:2021-05-07T16:28:04.570Z 来源:《中国电业》2021年4期作者:刘祺[导读] 随着无人机航行距离的延长,高压输电线路的自动化综合巡检能力呈现不断下降的变化趋势。
刘祺国网喀什供电公司新疆喀什市 844000摘要:随着无人机航行距离的延长,高压输电线路的自动化综合巡检能力呈现不断下降的变化趋势。
为避免上述情况的发生,mapper 型航线三维重构技术根据数字化电网内电子寄存数量的变动情况,计算与航行轨迹相关线路弧变系数,联合Pix4D平台,模拟无人机理想化行进状态。
此方法可对输电线路进行有效检测,但此方法匹配的航角测量精度数值过低,易引发航行信息传输耗电总量异常增大。
为解决此问题,设计面向输电线路精细化巡检的无人机航线自动规划方法。
在电子传感器数据采集模块、地面规划主机等多个硬件执行结构的支持下,得出精准航摄高度数值,并通过对比实验的方式,验证了该新型航线规划方法的实际应用价值。
关键词:电力巡线;激光雷达;无人机;危险点分析引言随着无人机技术的成熟,无人机在电力巡检过程中拥有广阔的应用前景[1]。
目前主要由地面工作人员根据搭载在无人机上的视觉摄像回传的图像、GPS信息等来控制无人机在巡检过程中的飞行及拍摄,但这种巡检方式仍对操作人员有极大的依赖性且工作强度大、效率低,已不能满足我国电力维护、电力监理的需求,因此开发无人机自主飞行的巡检系统已然成为新的趋势。
对于现有的输电线路无人机自动巡检技术,在航线规划过程中航点的制作大多需人工输入、过程繁琐,尤其是无人机每个航点的经纬度坐标、高度需要预先逐点依次收集,一旦将出现差错严重影响飞行安全。
同时固定翼无人机进行输电线路巡检时,其工作路径规划通常受到包括巡检任务和无人机性能参数等多种约束条件,使得寻找安全、合适、有效的输电线路无人机巡检路径变得极为困难。
1机载激光雷达机载激光雷达包含了激光扫描仪、GPS、IMU、数码相机等光谱成像设备。
机载激光雷达技术在水利水电测绘工程中的应用

机载激光雷达技术在水利水电测绘工程中的应用摘要:随着社会经济的欣欣向荣和我国城市建设快速发展,水利水电工程行业取得蓬勃发展。
机载激光雷达技术被我国逐渐引进并应用于水利水电测绘工程中。
该技术由于集成了GPS系统以及激光测距系统、INS系统,因而在地球空间信息的获取方面有良好的应用效果。
为提高水利水电工程测绘工作的质量与效率,当前应加强对各类先进测绘技术与产品的应用。
机载激光雷达技术的出现,能够在较短的时间内完成三维空间地理信息的采集,进而极大地提高了水利水电工程测绘工作的效率。
此外,在电力工程、交通运输行业以及国土资源调查等工作中,亦有该技术的应用。
关键词:机载;激光雷达技术;水利水电;测绘工程;应用引言机载激光雷达(LiDAR)测量技术集成定位、惯性导航、激光测距和摄影测量功能为一体,不仅具有航摄技术的优点,相比传统测绘,还有全天时作业、生产效率高、较大程度克服植被覆盖的影响、更好地实现勘测设计一体化等突出优势,被誉为遥感技术领域的一场革命,受到业界的广泛关注。
1机载激光雷达机载激光雷达是将激光雷达搭载在飞机上进行数据采集的。
机载平台包括无人机和有人驾驶的飞机,目前工程中应用较广泛的是无人机激光雷达测量系统,具有结构设计美观、集成化和自动化程度高、机身小巧易携带作业等优势,适合多种地形测绘、地籍测量项目。
机载激光雷达获取地面目标点三维地理信息数据具有快速、高精度、高密度、控制点少的特点。
该技术是对传统航空摄影测量技术很好的补充,在复杂地形测绘中具有独特的优势。
目前,机载激光雷达技术被广泛应用于林业、电力等领域,也逐渐在水利水电工程测绘应用中取得较理想的效果。
2机载激光雷达技术在水利水电测绘工程中的应用2.1控制点基站的布设机载激光雷达系统利用机载动态未知GPS数据与架设在地面已知基站的GPS数据构成的差分全球定位系统DGPS联合解算出其在任意时刻的空间三维坐标信息,然后将此信息与惯性测量单元IMU、激光测距数据组合,最终获取得到地面物体的三维坐标信息。
现代机载火控雷达功能模式

现代机载火控雷达功能模式机载火控雷达的功能发展历程机载火控雷达诞生于第二次世界大战,到现在已经走过了六十多年的历程,它是现代战斗机火控系统的关健设备之一。
1941年10月,美国辐射试验室开始着手世界上第一部机载火控雷达的研制工作,并于1944年将其装备在美国海军战斗机F-6F、F-7F上,这部雷达具有空-空上视搜索、测距和跟踪等机载火控雷达的最基本功能。
二战后,随着航空电子技术的快速发展,机载火控雷达的功能和性能不断得到提升,其作用越来越受到重视,但是早期的机载火控雷达在进行下视搜索时,会遇到很强的地面杂波而难以搜索到目标,作战效能受到严重制约。
对机载火控雷达下视功能的迫切需求催生了脉冲多普勒体制的机载火控雷达。
70年代初,第一部实用型机载脉冲多普勒火控雷达A WG-9由美国休斯公司研制成功,并装备在美国海军的F-14战机上。
随后,机载脉冲多普照勒火控雷达得到迅速发展,几乎成为先进战斗机火控雷达的惟一选择,是第三代战斗机的重要指标之一,它使现代先进战斗机真正具有了远程、全天候、全方位和全高度攻击能力。
20世纪90年代以来,在数字技术和微电子技术的推动下,对机载雷达多目标攻击、抗干扰以及一体化等功能和性能的更高要求使得相控阵技术开始应用于机载火控雷达,又进一步促使了机载火控雷达更多功能的开发,现代机载火控雷达的发展已经步入了相控阵时代。
现代机载火控雷达的多功能机载火控雷达功能从最初的只具有简单的空-空搜索、测距和跟踪等简单功能开始,发展到了现在的空-空、空-地、空-海、导航等四大类共几十种子功能(有些文献将空-地、空-海等功能统称为空-面功能),所制导的武器由原来的机炮发展到各种导弹和精确制导炸弹,使战斗机真正具有了远程、全天候、全方位和全高度的攻击能力。
一、空-空功能(A-A)空-空功能是机载火控雷达的基本功能,主要针对的是各类空中目标,典型的目标是战斗机、轰炸机、运输机、无人机等以螺旋桨或喷气发动机推进的飞机。
机载探地雷达数值模拟及逆时偏移成像

机载探地雷达数值模拟及逆时偏移成像傅磊;刘四新;刘澜波;吴俊军【摘要】机载探地雷达可以用于人类无法到达的危险地区、植被严重覆盖的地下目标体探测,然而由于机载探地雷达的特殊性,影响机载探地雷达探测效果的因素包括天线的极化方向、天线的飞行高度以及地表粗糙度等.为了研究这些影响因素与探测效果之间的关系,用三维时间域有限差分模拟电磁波的传播过程,以沙漠地区地下空洞掩体的机载探地雷达探测为实例,分别模拟了不同天线极化方向、天线高度及地表粗糙度情况下的机载探地雷达剖面,分析了各因素对机载探地雷达探测地下空洞目标体的影响.天线极化方向与目标体走向垂直更有利于地下目标体探测;天线距离地表越近,可以获得更高分辨率的雷达剖面;沙漠地表起伏越大,雷达剖面中的散射杂波能量越强,浅部地下目标体信号容易被掩盖.为了消除起伏地形造成的散射杂波,提出用逆时偏移成像技术对共炮集机载探地雷达数据进行偏移成像,成像结果优于基尔霍夫偏移成像结果.【期刊名称】《地球物理学报》【年(卷),期】2014(057)005【总页数】11页(P1636-1646)【关键词】机载探地雷达;FDTD;空洞探测;散射杂波;逆时偏移成像【作者】傅磊;刘四新;刘澜波;吴俊军【作者单位】吉林大学地球探测科学与技术学院,长春130026;吉林大学地球探测科学与技术学院,长春130026;康涅狄格大学城市与环境工程系,Storrs 06269;中国石油集团东方地球物理勘探有限责任公司新兴物探开发处,河北涿州072751【正文语种】中文【中图分类】P6311 引言探地雷达(Ground Penetrating Radar)简称GPR,是一种利用电磁波进行无损探测的浅层地球物理技术,被广泛应用于考古学,冰川学,矿产勘查,以及环境与工程等领域.Norhidayahti(2012)等利用探地雷达在马来西亚的仁岭进行考古研究;Arcone(1991)研究了南极洲冰雪覆盖的3.2km深度内的地质结构;Moore等(1999)用50MHz和200MHz雷达天线对挪威斯瓦尔巴特群岛南部的多热型冰川进行了高精度勘察;Singh(2007)利用探地雷达对大型矿砂矿床资源量进行评估.对于植被严重覆盖的区域,或人类无法到达的危险地区如战场、雷场等,常规的探地雷达则显得无能为力,然而机载探地雷达(Damm et al.,2006;刘四新等,2012)(Airborne GPR)却是一种有效的探测手段.目前,机载探地雷达的发展和其在工程上的应用仍然受很多因素制约.美军寒地研究及工程实验室(CRREL)通过在直升机上悬吊传统探地雷达系统(Arcone,1991),在阿拉斯加及南极洲对冰层厚度及冰层中裂隙进行了探测研究.德国地球科学和自然资源研究所(BGR)开发了一套特殊的机载探地雷达系统(Krellmann et al.,2008),它被安装在AS350直升机上,角反射器天线作为发射和接收天线,操作频率为150MHz,该雷达系统成功应用于地质调查.美国德克萨斯大学奥斯汀分校地球物理研究所(UTIG)开发了固定翼机载探地雷达系统(Holt et al.,2006),该平台包括了重力仪、磁力仪、激光高度计、导航系统、数码相机以及冰雷达,该系统为窄带系统,特点是速度快、功率大.由于机载探地雷达的天线距离地表较高,其电磁波传播要比常规探地雷达复杂.常规探地雷达天线通过与地面耦合向地下发射电磁波,而机载探地雷达天线首先与空气耦合,电磁波能量在空气中由于几何扩散而衰减,到达地表时,一部分能量反射(散射)回空气中,剩下的能量继续向地下传播,遇到地下介质不连续面便产生反射波,该反射波经过地层衰减以及几何扩散,最终到达接收天线.可见,相比于常规探地雷达,机载探地雷达的探测机理变得更为复杂.影响机载探地雷达探测效果的因素主要有天线极化方向、天线高度以及地表粗糙度等,为了研究这些因素与机载探地雷达探测效果之间的关系,采用三维时间域有限差分(3D-FDTD)方法对沙漠地区地下空洞掩体机载探地雷达探测进行数值模拟,并分析各因素对探测效果的影响.机载探地雷达探测过程中,起伏的地表会导致地表散射杂波的存在,这些散射杂波的能量一般较强,在地下目标体埋深较浅的情况下,目标体信号会被地表杂波掩盖.为了消除地表杂波的影响,张蓓等(2005)提出子空间地表杂波抑制方法,并取得了一定的效果,本文使用逆时偏移成像(Chang and McMechan,1994;Wu et al.,1996;Sun et al.,2006;龙桂华等,2011;王童奎等,2012;徐兴荣等,2012;孙小东等,2012;王保利等,2012;胡明顺等,2013;张岩和吴国忱,2013)的方法来消除地表杂波的影响.2 高斯随机粗糙表面传统探地雷达探测中,与天线接触的地表一般比较平坦,而机载探地雷达探测过程中遇到的地形情况比较复杂.为了模拟粗糙不平的起伏地表,引入高斯随机粗糙表面(Kobayashi et al.,2002;法文哲和金亚秋,2010),它的功率谱表示如下:其中σ为粗糙表面的均方根高度,它决定了粗糙表面在垂直方向的尺度;kx和ky 分别为粗糙面在x和y方向的波数;lx和ly分别为沿x和y方向的相关长度,它与粗糙表面在水平方向的尺度有关.对于一定的水平尺度lx和ly,均方根高度越大意味着表面越粗糙.我们用自由空间中的波数k与均方根高度σ的乘积大小来度量粗糙面的粗糙度.图1所示分别是三种不同粗糙度的高斯随机粗糙表面,本文模拟中,选取水平相关长度lx和ly均为1.25m.图1a是kσ1为0.5的高斯随机粗糙表面,其最大高程为1.14m,最小高程为-0.91m;图1b是kσ2为1的高斯随机粗糙表面,其最大高程为2.28m,最小高程为-1.82m;图1c是kσ3为2的高斯随机粗糙表面,其最大高程为4.56m,最小高程为-3.64m.从图可知,当度量值kσ越大,随机粗糙表面的粗糙度越大.3 数值模拟及分析通过对典型地质模型进行雷达波的正演模拟,可以了解电磁波在介质中的传播过程,有助于对雷达数据的解释.从麦克斯韦微分方程组出发,Yee(1966)提出了时间域有限差分求解法,它将麦克斯韦旋度方程组进行差分离散,在时间上迭代推进求解空间中每一个时刻的电磁场值.本文利用三维时间域有限差分法(刘四新等,2005;2007;2011;2012;Taflove et al.,2005)对起伏的沙漠地区地下空洞掩体机载探地雷达探测进行了数值模拟.图2a是建立的三维地质模型,其空间尺度在x方向为116m,在y方向为60m,在z方向为30m.用度量值kσ2=1高斯随机粗糙表面代表起伏的沙漠表面,沙漠表面所在的平均高程为15m,即干沙的厚度约为15m,其相对节电常数为4,电导率为0.1mS·m-1.在干沙地层内部有两个沿y走向空洞掩体,分别用充满空气的两个圆柱体表示.图2b是y=15m处的二维切片模型,从图可知,两个空洞的xz截面中心坐标分别为(48,10.5)和(68,7.5)m,空洞的截面半径均为1.5m.图中虚线代表天线的飞行轨迹,即合成数据的记录位置,其距离平均地表的平均高度约12m,水平方向30~90m,每隔0.5m记录一道数据.图1 高斯随机粗糙面Fig.1 Gaussian random roughness surface(a)kσ1=0.5;(b)kσ2=1;(c)kσ3=2.色标为均方根高度,单位 m.图2 (a)沙漠地区空洞三维模型;(b)相应的二维模型,色标为相对介电常数,无量纲Fig.2 (a)Three-dimensional model of cavity embedded in the sand;(b)Corresponding two-dimensional model3.1 波场快照分析整个模型空间离散为0.2m的立方体单元格,选取中心频率为50MHz的雷克子波作为激励源,时间采样间隔为0.2ns,时窗为250ns.当激励源位于合成记录位置的中点,采用x方向的电场极化,截取不同时刻的波场快照,见图3,白色星号表示激励源所在位置,白色曲线代表起伏的沙漠地表,两个圆形分别代表地下目标体.观察y=15m截面不同时刻x方向的电场,图3a是60ns时刻的波场快照,可以看到此时波前刚刚传到起伏的沙漠表面,在高程大于平均高程(15m)的60m处,已经有部分能量散射到空气中;图3b是100ns时刻的波场快照,从图可知,由于起伏地表的影响,一部分能量散射回空气中,并且散射波杂乱交错,剩下的能量穿透沙漠地表继续往前传播,其波前面已经触及到浅部异常体,并且波前面变的不规整;图3c是140ns时刻的波场快照,此时波前面已经传到深部异常体,发现两个异常体的反射波能量弱于空气中的散射杂波能量;图3d是180ns时刻的波场快照,其波前面可以看做是在起伏地表上的许多二次源的波前面叠加效果,可见起伏地表会造成地表散射杂波,而且其能量往往强于地下目标体反射回波信号.3.2 不同天线极化方向对探测效果影响分析机载雷达探测实际过程中,由于直升机的飞行速度、当地风向及风速的变化等影响,天线的姿态会发生变化,如左右旋转,上下摇摆.根据机载雷达的特殊性,本文研究了四种典型的天线配置方式,如图4所示,天线的飞行轨迹为沿x方向的带右端箭头的虚线,其中FBy代表天线平行并分别配置于直升机的头部和尾部,天线的极化方向为y方向;FBx代表天线同轴共线配置于直升机的头部和尾部,天线的极化方向为x方向;LRy代表天线共线配置于直升机的左右两翼,天线的极化方向为y方向;LRx代表天线平行配置于直升机的左右两翼,天线的极化方向为x方向.图3 不同时刻的波场快照Fig.3 Wave field snapshots at different time(a)60ns;(b)100ns;(c)140ns;(d)180ns.图4 机载探地雷达四种不同的天线配置方式Fig.4 Four different antenna configurations for airborne GPR survey根据四种典型的天线配置方式,研究了不同极化方式对机载探地雷达探测地下异常体的影响.选取粗糙度为kσ2=1的高斯随机表面代表起伏的沙漠表面,固定天线距离沙漠地表高度为12m,模型参数与图2所示三维模型保持一致.图5是四种典型的天线配置情况下获得的机载探地雷达探测地下空洞掩体的雷达剖面,图中的直达波均已去除.图5a是天线分别配置于直升机头部和尾部,y方向极化时获得的模拟雷达剖面,从图可知,地表的散射杂波主要集中在110~130ns,其能量远远强于地下目标体能量,浅部异常体反射信号完全淹没于杂波中,但是来自深部异常体的双曲形态反射信号仍然能被识别;图5b是天线同轴共线分别位于直升机头部和尾部,x方向极化时获得的模拟雷达剖面,从中可知,地表的散射杂波能量仍然比较强,但是浅部的异常体目标反射信号以及深部的目标反射信号均可以被识别;图5c是天线分别位于直升机左右两侧,x方向极化时获得的模拟雷达剖面,强地表杂波淹没了浅部目标体信号;图5d是天线分别位于直升机左右两侧,y方向极化时获得的模拟雷达剖面,图中来自地表的散射杂波能量主要集中在110~130ns 范围内,浅部目标体仍然可以识别.综上可知,当天线的极化方向与异常体的走向平行时,地下浅部目标体的信号被来自地表的强杂波覆盖,地下浅部异常体目标很难被识别,而当天线的极化方向与异常体垂直时,地下异常体目标反射波能量增强,虽然地表杂波能量较强,但是浅部异常体目标仍然可以被识别.因此,在机载探地雷达实际探测过程中,在保证测线与异常体走向垂直的同时,天线飞行过程中应尽量保证天线的极化方向与异常体走向垂直.3.3 天线高度对探测效果影响分析图5 四种不同天线配置方式下模拟的雷达剖面Fig.5 Simulated profile resultsfor four antenna configurations of Airborne GPR(a)FBy;(b)FBx;(c)LRy;(d)LRx.色标为归一化振幅.机载探地雷达探测过程中,为了保证天线的飞行姿态稳定,天线的飞行轨迹应避开地表植被以及地面建筑物,即天线距离地面高度不能过低.为了研究天线距离地表高度对探测结果的影响,选取粗糙度为kσ2=1的高斯随机粗糙表面代表起伏的沙漠表面,天线位于直升机左右两侧,激励源的极化方向为x方向极化,模型中的其他参数保持不变,改变天线的高度,分别从6m到8m、10m、12m(如图6所示)模拟了不同高度情况下沙漠地区地下空洞掩体机载雷达探测雷达剖面,图中直达波均已去除.图6a是当天线距离地表平均高度为6m时得到的合成雷达剖面,从图可知,位于浅部的异常体及深部的异常体反射波双曲形态同向轴清晰可见,来自地表的散射杂波能量较强,图6b是天线距离地表平均高度为8m时的合成雷达剖面,图6c是天线距离地表平均高度为10m时的合成雷达剖面,图6d是当天线距离地表平均高度为12m时获得的雷达剖面,从图可知,随着天线距离地表的距离增加,来自地下异常体的反射波的能量越来越弱,其双曲线型同向轴的振幅变小,同向轴越来越模糊,而来自地表的反射杂波的能量仍然很强.对于机载探地雷达探测地下异常体,发射天线发射的电磁波能量在空气中由于几何扩散而衰减,其能量与距离的二次方成反比,随着天线高度增加,到达地表的能量减少,从而降低了信噪比,不利于地下异常体的探测.机载雷达野外实际探测中,为了得到更高分辨率的雷达图像,在保证天线飞行姿态稳定的情况下,天线高度尽可能降低.3.4 粗糙表面对探测效果影响分析传统探地雷达探测过程中,天线与地面耦合,大部分能量直接向地下传播;而机载探地雷达探测过程中,天线位于距离地面较高的空中,发射天线发出的电磁波在空气中由于几何扩撒而损耗能量,当电磁波到达地表时,粗糙不平的地表会导致电磁波的空间各个不同方向的散射,为了研究不同粗糙度表面对探测结果的影响,把天线距离地面的高度固定为12m,天线位于直升机左右两侧,激励源为x方向极化,其他模型参数保持不变,改变沙漠地表的粗糙度.图7是沙漠地表不同粗糙度情况下获得的机载探地雷达探测地下空洞的模拟结果.图中水平方向是沿x方向的距离,垂直方向是电磁波双程传播时间,图中所有剖面的直达波都已去除.图6 不同天线高度下模拟的雷达剖面Fig.6 Simulated radar profile of different antenna height(a)6m;(b)8m;(c)10m;(d)12m.色标为归一化振幅.图7a是沙漠地表水平情况下得到的雷达剖面,从图可知,水平同向轴是来自沙漠地表的反射波,而两条双曲线分别代表来自地下空洞的反射波,两条双曲线的顶点位置反映了异常体所在的水平位置,从剖面可知,第一个异常体水平位置为48m,第二个异常体的水平位置为68m,这与模型是一致的.图7b是沙漠表面粗糙度为kσ1=0.5时的雷达剖面,相比于图7a,可以发现,虽然来自沙漠表面以及地下空洞的反射波均能清晰地识别,但是雷达剖面在110~130ns之间出现了很多地表散射杂波,这些杂波的存在势必给剖面的解释带来困惑,另外来自地下空洞的反射波的振幅稍有变小.图7c是沙漠表面粗糙度为kσ2=1时的雷达剖面,仍然可以清晰地识别来自沙漠表面的反射波,然而由于沙漠表面粗糙度的增加,导致电磁波在地面的散射更严重,穿透到地下的电磁波能量更少,所以来自地下空洞的反射同向轴变得模糊,位于110~130ns的散射波能量变的更强.图7d是沙漠表面粗糙度为kσ3=2的雷达剖面,来自地表的散射杂波能量进一步增强,而来自地下异常体的反射波的双曲线形态已经很难被识别.从该剖面中,我们很难定位地下异常体的位置.由此可见,粗糙的地表会导致电磁波的散射,地表散射而损耗的电磁波能量越多,散射杂波的能量越强,同时,穿透到地下的电磁波能量相应的就越少,来自地下目标体的反射波能量就越弱.反映在雷达剖面中图像分辨率降低,不利于机载探地雷达探测的开展.4 逆时偏移成像雷达电磁波与地震波在运动学上存在相似性,反射地震上的偏移技术可以借鉴到探地雷达数据处理中.偏移的目的是为了使雷达剖面中倾斜界面共深度映像聚焦,使绕射波归位.为了消除机载探地雷达探测中由于起伏地形产生的地表散射杂波影响,借鉴反射地震中的逆时偏移成像(RTM)技术.图7 机载探地雷达于沙漠地区探测地下空洞的模拟结果Fig.7 Radar profile of airborne GPR detecting cavities at desert area(a)表面水平情况;(b)表面粗糙度为kσ1=0.5;(c)表面粗糙度为kσ2=1;(d)表面粗糙度为kσ3=2.色标为归一化振幅.(a)With smooth surface;(b)With kσ1=0.5roughness surface;(c)With kσ2=1roughness surface;(d)With kσ3=2roughness surface.地震上逆时偏移可分为叠前逆时偏移和叠后逆时偏移.叠前偏移是把共炮点道集记录或共偏移距道集记录中的反射波归位到产生它们的反射界面上并使绕射波收敛到产生它的绕射点上,最后得到能够反映界面反射系数特点的并正确归位了的地震波形剖面.叠后偏移是在水平叠加剖面的基础上进行的,针对水平叠加剖面上存在的倾斜反射层不能正确地归位和绕射波不能完全收敛的问题,采用了爆炸反射面的概念来实现倾斜反射层的正确归位和绕射波的完全收敛.相对其他方法而言,逆时偏移用全程波方程对波场延拓,避免对波动方程的近似,因此没有倾角限制,原理上可以利用转换波、棱镜波、或者多次反射波成像,并获得更精确的振幅等动力学信息,实现保幅成像,还可以更好地对复杂速度成像进行更细化更精确的估计,成像方法不受介质速度变化的影响,能够对复杂区域进行较准确的成像.本文借鉴反射地震叠前偏移技术,采用和勘探地震中类似的共炮集观测方式合成雷达数据.为了合成共炮集数据,采用1个发射天线及8个接收天线,接收天线间距为1m,发射天线与第一个接收天线的偏移距为3m,发射天线每次移动距离为1m,这样可以获得一个共炮集数据集.合成数据时,天线距离地面的高度固定为12m,激励源为x方向极化,其他模型参数保持不变,改变沙漠地表的粗糙度,获得不同粗糙度情况下共炮集雷达数据集.图8 不同地表粗糙度情况下雷达剖面偏移成像结果Fig.8 GPR migration results for different roughness surface(a)地表水平时基尔霍夫偏移结果;(b)kσ1=0.5时基尔霍夫偏移结果;(c)kσ2=1时基尔霍夫偏移结果;(d)kσ3=2时基尔霍夫偏移结果;(e)地表水平时逆时偏移结果;(f)kσ1=0.5时逆时偏移结果;(g)kσ2=1时逆时偏移结果;(h)kσ3=2时逆时偏移结果.(a)Kirchhoff migration result at smooth surface;(b)Kirchhoff migration result at kσ1=0.5;(c)Kirchhoff migration result a t kσ2=1;(d)Kirchhoff migration result at kσ3=2;(e)Reverse time migration result at smooth surface;(f)Reverse time migration result at kσ1=0.5;(g)Reverse time migration result at kσ2=1;(h)Reverse time migration result at kσ3=2.采用二维RTM算法,对共炮集雷达数据集进行逆时偏移成像,同时为了对比说明RTM的成像效果,本文给出了基尔霍夫偏移成像(Duquet et al.,2000;Eaton et al.,2002;Zhu and Lines,1998)结果,如图8所示.图中左边一栏四个图是来自基尔霍夫偏移成像的结果,右边一栏是来自二维逆时偏移成像的结果.图8a是水平地表情况下基尔霍夫偏移成像结果,其地下目标体的反射波聚焦较好,聚焦位置基本反映了地下目标体的空间位置,图8e是地表情况下逆时偏移成像结果,从中可知,地下目标体的空间位置、几何形态及尺寸与实际模型基本一致;图8b是在kσ1=0.5的粗糙表面情况下获得的基尔霍夫偏移成像结果,图中散射杂波仍然杂乱无章,散射杂波并没有得到聚焦,杂波的存在仍然会影响地下异常体的判断,图8f是对应的逆时偏移结果,来自地表的散射杂波归位,地下目标体清晰可见,地下目标体的空间位置、几何形态、尺寸以及起伏地表与实际模型基本一致;同样的,图8g和图8f中的偏移成像结果明显好于图8c和图8d的.基尔霍夫偏移技术只能让地下反射目标体信号聚焦,聚焦位置大致反映目标体空间位置,无法聚焦的散射杂波仍然会对数据解释造成困扰,随着地表粗糙度增加,地下目标体聚焦能量减弱,而逆时偏移成像技术不但可以使地下目标体反射波聚焦,刻画地下目标体空间位置、几何形态及尺寸大小,而且可以让地表散射杂波归位,同时起伏的地形亦得到刻画.5 结论(1)数值模拟试验表明天线的极化方向与异常体走向垂直时更利于探测地下目标体,因此机载雷达野外探测时,为了得到更高分辨率的雷达图像,测线与异常体走向垂直的同时,尽可能地保证天线的极化方向与异常体走向垂直.(2)随着天线高度的增加,从发射天线发射出的电磁波能量由于几何扩散而衰减更多,不利于探测,实际野外探测中,保证天线姿态稳定的情况下,飞行高度尽可能地降低.(3)地表粗糙度的增加会导致地表散射杂波增强,造成传播到地下的电磁波能量减少,削弱地下目标体信号,雷达剖面的分辨率降低,不利于地下异常体目标识别. (4)成功借鉴反射地震上逆时偏移成像技术,使地下目标体反射波聚焦,聚焦位置很好地刻画了异常体的空间位置、几何形态及尺寸大小,同时,可以使地表散射杂波归位,起伏的地形在偏移后的剖面中得到刻画;随着地表粗糙度的增加,基尔霍夫偏移成像结果更差,而逆时偏移成像结果仍然能够很好地刻画起伏地形及异常体.ReferencesArcone S A.1991.Dielectric constant and layer-thickness interpretation of helicopter-borne short-pulse radar waveforms reflected from wet and dry river-ice sheets.IEEE Transactions on Geoscience and Remote Sensing,29(5):768-777.Arcone S A.1996.High resolution of glacial ice stratigraphy;A ground-penetrating radar study of Pegasus Runway,McMurdo Station,Antarctica.Geophysics,61(6):1653-1663.Chang W F,McMechan G A.1994.3-D elastic prestack,reversetime depth migration.Geophysics,59(4):597-609.Damm V,Casassa G,Blindow N,et al.2006.Airborne GPR measurements in the Atacama Desert first results and constraints using a 150MHz pulse radar for groundwater exploration.11th International Conference on Ground Penetrating Radar,19-22.Docherty P.1991.A brief comparison of some Kirchhoff Integral formulas for migration and inversion.Geophysics,56(8):1164-1169.Duquet B,Marfurt K J,Dellinger J A.2000.Kirchhoff modeling,inversion for reflectivity,and subsurface illumination.Geophysics,65(4):1195-1209.Eaton D W,Hope J,Bohlen T.2002.An elastic Kirchhoff method for computing synthetic seismograms:Modeling the receiverfunction response of an irregular Moho surface.Seismol.Res.Lett.,73(2):232. Fa W Z,Jin Y Q.2010.Simulation of radar sounder echo from lunar surface structure.Sci.China Earth Sci.,40(4):473-485.Holt J W,Peters M E,Morse D L,et al.2006.Identifying and characterizing subsurface echoes in airborne radar sounding data from a high-clutter environment in Taylor Valley,Antarctica.∥Proc.the 11thInt.Conf.on Ground Penetrating Radar,AIR.3-5.Hu M S,Pan D M,Dong S H,et al.2013.Optimization for random boundary building in reverse-time migration based on scattering theory.Progress in Geophys.(in Chinese),28(4):2069-2077. Kobayashi T,Oya H,Ono T.2002.A-scope analysis subsurface radar sounding of lunar mare region.Earth,Planets and Space,54(10):973-982.Krellmann Y,Lentz H,Triltzsch G.2008.Stepped-frequency radar system in gating mode:An Experiment as a new helicopterborne GPR system for geological applications.IEEE Geosci.and Remote Sens.Symp.1:153-156. Liu S X,Sato M.2005.Transient radiation from an unloaded,finite dipole antenna in a borehole:experimental and numerical results.Geophysics,70(6):k43-k51.Liu S X,Zeng Z F,Xu B.2006.FDTD simulation of ground penetrating radar signal in 3-dimensional dispersive medium.Journal of Jilin University (Earth Science Edition),36(1):123-127.Liu S X,Feng Y Q,Fu L,et al.2012.Advances and numerical simulation of airborne ground penetrating radar.Progress in Geophys.(in Chinese),27(2),0727-0735.Long G H,Zhao Y B,Li X F,et al.2011.Accelerating 3D staggered-grid finite-difference seismic wave modeling on GPU cluster.Progress inGeophys.(in Chinese),26(6):1938-1949.Liu S X,Zeng Z F,Deng L.2007.FDTD simulations for ground penetrating radar in urban applications.Journal of Geophysics and Engineering,4(3):262-267.Liu S X,Wu J J,Zhou J F,et al.2011.Numerical simulations of borehole radar detection for metal ore.IEEE Geosci.and Remote Sens.Lett.,8(2):308-312.Liu S X,Wu J J,Dong H,et al.2012.The experimental results and analysis of a borehole radar prototype.Journal of Geophysics and Engineering,9(2):201.Moore J C,Pälli A,Ludwig F,et al.1999.High-resolution hydrothermal structure of Hansbreen,Spitsbergen,mapped by ground-penetrating radar.Journal of Glaciology,45(151):524-532.Muztaza N M,Saidin M M,Azwin I N,et al.2012.Archaeological structure detection using 3DGPR survey in Jeniang,Kedah,Malaysia.∥International Proceedings of Chemical,Biological and Environmental Sciences,36:49-53.Singh N K.2007.Ground penetrating radar(GPR)mineral base profiling and orebody optimization.∥The 6th International Heavy Minerals Conference.Hluhluwe,South Africa,185-194.Sun R,McMechan G A,Lee C S,et al.2006.Prestack scalar reverse-time depth migration of 3Delastic seismic data.Geophysics,71(5):S199-S207.Sun X D,Li Z C,Wang X L.2012.Pre-stack reverse-time migration using a。
无人机机载激光雷达在输电线路巡线中的应用

电气工程与自动化!Di*+qi Gongcheng yu Zidonghua无人机机载激光雷达在输电线路巡线中的应用丁华(张辉!(1.贵州电网有限责任公司输电运行检修分公司,贵州贵阳550002;2.中国电建集团贵州电力设计研究院有限公司,贵州贵阳550081)摘要:针对传统人工电力巡线方法存在的效率低、成本高,以及直升机电力巡检存在的技术烦琐、可操作性不强等问题,探讨了无人机机载激光雷达系统、巡线原理及技术流程,重点介绍了点云数据的处理,点云的分、点分析、工拟分<=>:电力巡线激光雷达无人机点分0引言随着电网规模的迅速扩大,对于经济发展较慢的山区,大的输电线于、流、高高压等,输电线成了大损害,、线、等了输电线路的安全稳定运行,各电力巡检系统对输电线行巡检。
传统输电线的巡检人工巡线,存在巡线周期长、效率低、成高等点,不大电网的巡线,的、的人工巡检带来了大的限直升机的出现虽然给输电线路巡检带来了极大的便利,直升机的技术人作,电力巡检公司有直升机,可操作性不强,直升机巡检需,,大量时因此,轻的无人机输电线巡检带来了质的改变,其结合激光雷达对输电线行点云采集,解决了机载相机无法准确得到输电线路通道内地物至电力线距离的问题!1"。
1无人机机载激光雷达系统1.1无人机系统无人机种可自主飞行或远程引导、不搭载人员的动力飞行器。
无人机因可以搭载相机、位系统、信息传输系统等硬广泛应用于紧急救灾、农、测绘等领通常情,无人机系统除了无人机体外,还包括飞行控系统、动力系统、源系统、任务荷载设备、通信 系统、地面监控站。
(1)飞行控系统作为整个系统的核心部位,用于控制无人机的起飞、降落等种工作状态。
(2)动力系统即发动机及相关附件设施。
(3)源系统即无人机系统提供电的相关部件。
(4)任务荷载设备即根务搭载的相关软硬件设备,如气象设备、农药喷洒设备、相机等。
(5)通信系统即数传输软硬(6)地面监测站用于控制并调整无人机飞行的路线、高度、角度等参数!2"。
波击苍穹中国早期陆基战略预警雷达系统

波击苍穹——中国早期陆基战略预警雷达系统中国第一代反弹道导弹防御工程:640工程60年代,中国处在美、苏全面封锁和“双重核讹诈”之中。
随着国际形势的变化和中国核武器、导弹事业的迅速发展,防止敌人导弹袭击,建立国土战略防御体系的历史任务便提上了党和国家的重要议程。
1963年12月,毛泽东在听取战略武器问题汇报时指示:“原子弹、导弹,无论如何也不会比别人搞得多。
同时,我们又是防御战略方针,因此除搞进攻性武器外,还要搞些防御武器。
”于是国防科委主任聂荣臻建议成立一个小组,由钱学森负责,研究我国发展反导弹武器系统的途径。
1964年2月,毛泽东在会见钱学森时专门谈到反导问题:“5年不行,10年;10年不行,15年。
总要搞出来的。
”1965年3月,周恩来总理主持召开当时的中央专委第12次会议,要求各科研单位将防御敌人导弹的研究工作列入年度计划和长远规划。
同年6月,国防科学技术委员会在北京召开“反导弹工程会议”,初步形成反导弹防御体系工作规划。
8月27日,中央专委办公室根据中央专委第13次会议决议连续下发5个通知,向各单位下达反导武器研制具体任务。
640工程由毛泽东提出,钱学森负责为加强保密,1966年3月国防科委将反导弹工程系统的代号定为“640工程”并上报中央军委。
3月22日,国防科委发出《关于反导弹工程体系的代号的通知》。
对640工程各分系统的代号规定如下:反导弹导弹系统工程代号为640-1;反导弹超级火炮系统工程代号为640-2;反导弹光炮系统工程代号为640-3;预警雷达系统工程代号为640-4;弹头再入物理现象的研究(后定名为突防反突防系统)工程号为640-5。
陆基导弹预警雷达系统:640-4工程作为反导作战的重要的一部分陆基早期导弹预警雷达系统,前苏联科学院无线电技术研究所的科学家们早在50年代末就开始了首部用于监视导弹袭击和航天器飞行的早期预警雷达——“德涅斯特河”(北约称之为:鸡笼)的研制工作。
A320系列飞机气象雷达系统介绍及机组操作建议

A320系列飞机气象雷达系统介绍及机组操作建议日期:09-08-13 14:09:51 作者:邵川(机务部技术科)郭振宇(机务部技术科)概述:机载气象雷达系统(WXR)用于在飞行中实时地探测飞机前方航路上的危险气象区域,以选择安全的航路,保障飞行的舒适和安全。
机载气象雷达系统可以探测飞机前方的降水、湍流情况,也可以探测飞机前下方的地形情况。
在显示器上用不同的颜色来表示降水的密度和地形情况。
新型的气象雷达系统还具有预测风切变(PWS)功能,可以探测飞机前方风切变情况,使飞机在起飞、着陆阶段更安全。
本文主要针对我公司A320系列飞机机载气象雷达系统的组成、工作原理、显示特点及我公司A320系列飞机气象雷达的种类和机组操作建议进行了介绍。
一、机载气象雷达系统的组成机载气象雷达系统的基本组成由:雷达收发机、雷达天线、显示器、控制面板和波导系统等,如图1-1所示:雷达收发机:用来产生发射射频脉冲信号和接收并处理射频回波信号,提供气象、湍流和地形等显示数据,探测风切变事件并向机组发送警告和告诫信息。
雷达天线:用来产生高3.6°、宽3.4°的波束并接收回波信号。
天线的稳定性受惯性基准组件(IRU)的俯仰和横滚数据控制。
显示器:对于A319/A320/A321飞机来说,气象雷达数据都显示在ND上。
控制面板:用于选择气象雷达的工作方式,控制天线的俯仰角度和稳定性,对接收机灵敏度进行控制。
波导系统:波导管作为收发机和天线之间射频信号桥梁通道。
二、气象雷达对目标的探测机载气象雷达主要用来探测飞机前方航路上的气象目标和其他目标的存在以及分布状况,并将所探测目标的轮廓、雷雨区的强度、方位和距离等显示在显示器上。
它是利用电磁波经天线辐射后遇到障碍物被反射回来的原理,目标的导电系数越高,反射面越大,则回波越强。
要清楚气象雷达如何工作的关键在于了解雷雨的反射率。
一般来说,雷雨的反射率被划分成三个部分:雷雨的下三分之一由于温度在冰点之上,所以全部由小雨滴组成,这部分是雷雨中对雷达波能量反射最强的部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在我国的雷达界,很早就形成了自力更生的传统。
从20世纪50年代初,我国就开始自主研制雷达,当时很多人没见过雷达,更不知道该怎么做。
经过几十年的艰苦奋斗,目前我国已发展为既是雷达大国,也是雷达强国。
每年例行举办的系列国际雷达会议,我国是与美国、英国、法国和澳大利亚并列的5个轮流主办国之一。
在三坐标雷达、低空雷达、机载预警雷达、数字阵列雷达、相控阵雷达和精密跟踪雷达等领域都迈入了国际先进行列。
亲爱的读者,如果你不太看得上我国的雷达技术水平包括机载雷达技术水平,我愿做一个国产雷达荣誉的捍卫者,跳出来与你争论一番。
先解决有无问题
20世纪50年代中国战斗机机载雷达发展的初期阶段,由于我国的战斗机是仿制苏联的型号,所以,机载雷达也以仿制苏联战斗机机载雷达为主。
这一时期,机载雷达的加装,主要是满足夜间飞行员目视能力下降情况下的国土防空作战需要。
我国随苏联米格-17和米格-19战斗机引进的机载雷达系统,最早都是测距器,只能测量目标距雷达的距离(速度也可由距离与时间的比值算出),不能测量目标的方位和高度,作用距离不超过两千米。
歼5和歼6飞机先是采用装备米格-15、米格-17和米格-19飞机上的срд-1/1m及其改进型测距器,自20世纪50年代后期开始装备рп-1/5型及其改进型雷达,对图-4飞机的作用距离也不超过10千米。
此时,雷达技术开始采用圆锥扫描体制和普通脉冲方式。
受到雷达系统本身技术性能差和载机空间不足的限制,我国早期夜间战斗机上使用的机载雷达存在有效作用距离短、抗杂波和干扰能力弱、低空探测效果差、可靠性不高和缺乏配套机载武器的问题,并不能完全满足我军战斗机部队执行国土防空作战的需求。
但这一时期,世界先进国家的雷达水平也不过尔尔。
从实际使用来看,我国装备的苏制机载雷达的夜间战斗机,在拦截国民党军夜间低空侦察机的作战行动中,实战效果有限,在受到敌方飞机施放电子干扰和地面背景杂波影响的情况下,常常不能正确判定目标。
可以说,此时的机载雷达,只能说是对目视能力的一定补偿,暂时解决了我军机载雷达的有无问题。
落差渐大
20世纪六七十年代国外机载雷达技术在这个时期是迅速提高阶段,单脉冲技术、脉冲压缩技术已经成熟并在机载雷达上使用,脉冲多普勒技术则开始进入装备的试生产,而相控阵技术也已经起步。
由于中苏关系变化,一时间中国机载雷达科研和生产单位失去了外来的技术支持,在加上国内政治形势的变化,机载火控雷达的发展速度变慢。
我国的机载雷达技术在艰难中继续前行。
20世纪60年代初,我国开始研制歼7飞机。
最早的机型歼7i采用苏联срд-5a/5mk 型雷达测距器的国产型cl-2,作用距离有3千米和8千米两档;歼7系列的最早出口型歼7a 和此后的国内型号歼7ii则都采用国产的222型测距器。
1966年3月,为满足强5攻击机的使用需要,我国在对国外样机进行测绘和研制工作的基础上,1970年夏试制完成两部样机,1976年完成各项空中试验并转入小批生产,陆续装备强5飞机,雷达型号为317。
1974至1976年,将317雷达小型化并研制出两部样机,命名为317甲型。
1979年完成空中试验,但未定型生产。
317型雷达长期装备强5飞机,为我国近海对海对面防卫发挥了突出作用。
它采用单脉冲体制,具有空空上视搜索与跟踪功能,不具备下视能力;但具备地形测绘、等高面测绘、地形回避和空地测距等多种功能。
几乎与此同时,我国开始研发歼8战机,这是我国20世纪60年代中期战斗机研制项目中最重要的型号。
为了提高歼8战斗机的战术性能和全天候作战能力,国内也开始研制与之
配套的机载雷达系统,即204单脉冲火控雷达。
该火控雷达项目在落实了研制所需要的142项试制任务后,一年内就完成了原理样机。
但是,由于雷达系统设计不完善以及材料、元件上所存在的缺陷,使该系统的试验工作困难重重。
尽管雷达样机在1971年就已开始装机试用,但却长期无法达到实用水平。
最终由于雷达系统研制进度的拖延,直接影响到歼8战斗机的整体进度,使得歼8在缺乏全天候火控雷达系统的情况下,只能被迫安装雷达测距仪,按照白天型战斗机的标准定了型。
直到20世纪80年代,歼8才重新按照1964年提出的原设计要求,研制完成了单脉冲体制的火控雷达,并完成定型。
此时,已过去了20年。
因为雷达系统和机体的研制全面落后于原计划的时间要求,所以致使歼8和歼8i战斗机并没有向研制项目开始时计划的那样成为中国战斗机换代机型,而只是一个在新型战斗机定型装备前的过渡机型。
就在歼8和歼8i战斗机火控雷达完成定型的时候,此时国外战斗机机载火控雷达技术已经步入了脉冲多普勒的成熟应用阶段,并且开始采用合成孔径体制,雷达的发展呈现出多功能化、高可靠性和抗干扰能力强的特点。
中国与西方发达国家在雷达技术上的差距,被历史性地拉开了。
尝试研制预警机
空警1号 20世纪60至70年代,我国开始尝试研制预警机。
万事开头难,由于当时的技术基础薄弱,最后未能解决雷达反杂波的问题,致使装备未能服役,最后收藏于中国航空博物馆。
新中国建立以后,国民党空军的飞机经常从低空和超低空入侵大陆地区,而地面雷达由于盲区较大,难以发现这些飞机目标。
1969年9月26日,中央军委发出了研制空中预警机的指示。
为此,我们决定将当时先进的843地面雷达进行小型化后搬上飞机。
其发射机重200多千克,除磁控管、显像管外,其它器件已经是半导体化。
1974年,在解决了飞机加装巨大雷达天线罩后的飞行安全性试验完成之后,开始了以雷达为主的试飞。
试飞结果表明,无论是在平原、沙漠或山区的地物回波都很强,雷达没有下视能力,但在青海湖湖面能发现低空目标。
这说明,湖面的回波强度比陆地小得多。
因此,可以推断此时的雷达在海面上空有下视能力。
为此在1976年3月进行了第一次海上试飞。
其结果,在渤海湾能看到300千米左右的船只和220千米左右的低空飞机,但是在海面上空看目标,仍然受到较严重的海浪杂波干扰。
在较强的海浪情况下,在50~100千米以内还是难以发现目标。
为此,项目组于1976年下半年开始,着眼于提高空警1号看海上目标的性能,同时继续采取措施,对陆地上空的下视能力做进一步试验。
这一阶段,换装了更好的雷达发射机,进一步提高了接收机的灵敏度,加装了动目标显示装置,并且重返渤海湾进行了试飞。
试飞结果表明,雷达在空中工作稳定,磁控管发射机无打火现象,抑制海浪杂波能力有所改善,但由于此时的动目标显示装置不能对飞机运动作出补偿,因此,飞机在海面上空飞行时的下视效果仍然不是很好,更别提在陆地上空了,仍不具备下视能力。
奋起直追与和平典范
20世纪80年代自20世纪70年代末开始,由于国家整体形势好转,我国在机载雷达领域奋起直追。
1980年6月,中国开始从英国引进空中巡逻兵-7m型测距器,同时安排国内试制生产,并装备歼7b、歼7m和歼7mp等出口型号,而歼7p及此后的歼7pg则由巴基斯坦选用了意大利grifio-7型单脉冲雷达,作用距离达55千米。
1980年,国内歼7型号歼7iii 及歼7iiia都开始采用国产jl-7单脉冲雷达。
20世纪90年代以后,国内歼7飞机的最新型
号歼7g则选用了以色列el/m 2032型脉冲多普勒雷达的国内生产型号,最大作用距离超过60千米。
同时,我国开始为歼8 ii飞机立项研制机载脉冲多普勒火控雷达。