噪声调幅与调频干扰信号仿真分析
广播电视工程中的调频与调幅技术比较

广播电视工程中的调频与调幅技术比较广播电视工程是现代社会中广泛应用的一项技术,其中调频技术和调幅技术是两种常见的调制技术。
本文将对这两种技术进行比较,并分析它们各自的优点和应用场景。
一、调频技术调频技术(Frequency Modulation,简称FM)是一种将声音信号嵌入到载波信号中的调制方式。
FM调制的特点是调制度稳定,抗干扰能力强,声音还原度高。
广播电台、音乐电台等常常采用FM调频技术进行信号传输。
优点:1. 抗干扰能力强:FM调频技术采用频率调制,信号除了传递有用信息外,还添加了一定的冗余信息,使得信号在传输过程中对于噪声和干扰的容忍性较强。
2. 高音质:FM调频技术在信号传输过程中可以保持较高的音质,音频的还原度较好,能够传递丰富的音频细节。
3. 传输距离远:由于FM调频技术抗干扰能力强,适用于长距离传输,所以可以实现广播电台的远距离覆盖。
二、调幅技术调幅技术(Amplitude Modulation,简称AM)是一种将声音信号嵌入到载波信号中的调制方式。
AM调制的特点是简单直接,适用于短距离传输和小功率设备。
无线电台、天气预报等常常采用AM调幅技术进行信号传输。
优点:1. 传输距离短:AM调幅技术适用于短距离传输,特别是在城市等有很多高楼大厦的地区,AM调幅技术可以有效克服高楼大厦产生的信号阻挡。
2. 低成本:相比于FM调频技术而言,AM调幅技术的设备和系统成本相对较低,对于一些资源有限的地区或应用场景更为适用。
三、调频技术与调幅技术的应用比较调频技术和调幅技术各有各的应用场景,二者在广播电视工程中的选择需要根据具体情况进行。
1. 广播电台:对于覆盖范围较大、信号质量要求较高的广播电台,FM调频技术是较为理想的选择。
FM调频技术可以提供高音质的音频传输和较远的传输距离,能够满足广播电台的需求。
2. 无线电台:无线电台主要用于城市范围内的短距离传输,对于传输距离要求不高的情况,AM调幅技术是一种经济实用的选择。
噪声调频干扰原理
噪声调频干扰原理噪声调频干扰是指在无线通信中,由于外部环境或其他无线设备的干扰,导致接收到的信号中混入了噪声,从而影响了信号的质量和可靠性。
在本文中,我将详细介绍噪声调频干扰的原理和影响,并探讨如何应对和减小这种干扰。
我们需要了解噪声调频干扰的产生原因。
噪声调频干扰主要来自两个方面:外部环境和其他无线设备。
外部环境的因素包括电力设备、天气、建筑物等。
这些因素会产生电磁波辐射,进而干扰到无线信号的传输。
而其他无线设备,则是指其他无线通信设备在相同频段上工作,导致相互之间的干扰。
噪声调频干扰的影响主要体现在信号质量和可靠性上。
由于干扰信号的存在,接收到的信号质量会下降,表现为信噪比降低、误码率增加等。
当信号质量下降到一定程度时,通信系统可能无法正常工作,导致通信中断或数据传输错误。
这对于一些对通信质量要求较高的应用场景,如无人机、智能网联汽车等,将带来严重的影响。
为了应对和减小噪声调频干扰,我们可以采取一系列的技术手段。
首先是频谱管理。
通过合理规划和分配频谱资源,避免不同设备在相同频段上工作,减少干扰的可能性。
其次是信号处理技术。
通过采用前向纠错编码、自适应调制等技术,提高信道容量和抗干扰能力,减小噪声调频干扰对信号的影响。
此外,还可以采用空分复用、波束成形等技术,通过空间域的优化来减小干扰。
除了技术手段,我们还可以从硬件设计和系统部署上着手,来减小噪声调频干扰。
在硬件设计上,可以采用抗干扰设计,增加抗干扰电路的布局和电磁屏蔽措施,提高设备的抗干扰能力。
在系统部署上,可以选择合适的通信频段、避免干扰源的靠近,以减小干扰的可能性。
对于一些对通信质量要求极高的应用场景,如军事通信、航空导航等,还可以采用加密技术来保证通信的安全性和可靠性。
通过加密算法和身份认证等技术手段,可以有效防止噪声调频干扰对通信数据的窃听和篡改。
噪声调频干扰是无线通信中不可忽视的问题。
它会对信号的质量和可靠性造成严重影响,给通信系统的正常运行带来威胁。
噪声干扰信号仿真软件研究与实现
-50
-100 Power/frequency (dB/Hz)
-150
-200
-250
-300
-350
0
0.5
1 1.5 Frequency (kHz)
2
2.5
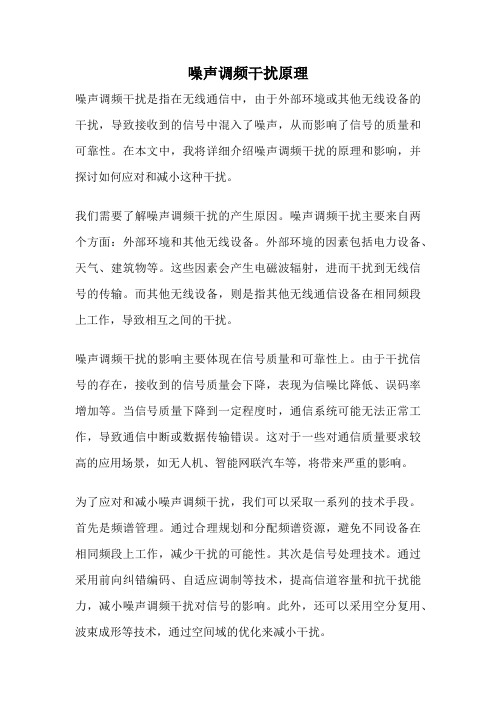
图 1-5 噪声调幅干扰信号的功率谱
由式( 1-4 )可知,噪声调幅干扰是由载频和两个对称 于载频的旁 瓣谱 组成,旁瓣谱的形状与噪声的功率谱相同,因此噪声调幅干扰的频谱宽度 为噪声 宽度的两倍。 3 、噪声调 频干扰 如果载波的瞬时频率随调制电压变化而变 化,而振幅保持不变,则这 种调制 称为调频。当调制电压为噪声调频,其信号表达式为
0.4
0.5 t
0.6
0.7
0.8
0.9
1
图 1-2 射频噪声干扰信号波形
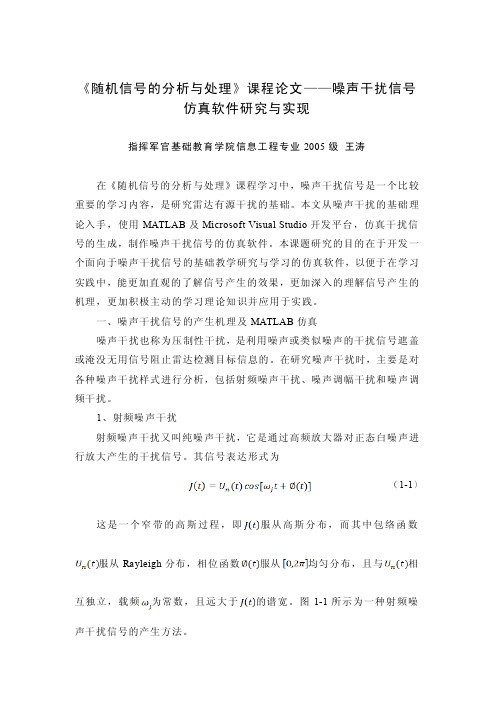
噪声是一种功率型信号,具有有限的功率而能量无 限,所以只能用 功 率谱来 表征其频率特性。理想的白噪声具有均匀的无限频谱,实际白噪声 则只存 在正的频率分量,射频噪声是将白噪声经射频放大后形成的干扰信 号。由于放大器的有限带宽,使射频噪声成为带限白噪声,其带宽 由放大 器带宽 决定,为了便于理论分析,其功率谱可以设为
( 1-2 ) 其中, 心频率 。 MATLAB 仿真结果如图 1-3 所示 :
Power Spectral Density Estimate via Periodogram
0
为噪声 的平均功率 ,
为干扰带宽, 为射频噪声干扰的 中
-50
-100 Power/frequency (dB/Hz)
-150
0 -20 -40 -60 Power/frequency (dB/Hz) -80 -100 -120 -140 -160 -180 -200
线性调频雷达的干扰与仿真
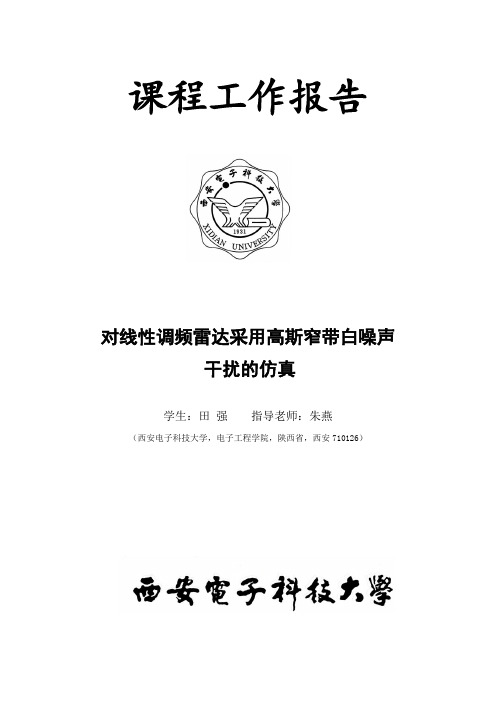
图2.1:高斯窄带白噪声的产生
噪声经过一个中心频率为Wo,带宽为B的带通滤波器。
Matlab仿真程序:
时域图如下:
图3.1:白噪声信号的时域波形和幅频特性
程序仿真截图:
图2.2:高斯窄带白噪声的时域仿真
2.2窄带白噪声干扰LFM信号的仿真
用窄带白噪声对线性调频雷达信号进行线性干扰,也就是把窄带白噪声与线性调频信号进行线性相加,从而产生对应的干扰信号。由于前面已经把相关的信号一一产生所以下面就对干扰信号进行仿真。
由于线性调频信号(LPM)有很强的抗干扰性能,本文就怎对其这一特点研究一下“在高斯白噪声的干扰下的线性调频信号(LPM)”的Matlab仿真。
关键词: 信息处理 线性调频 干扰 仿真
ABSTRACT
Signal and information processing is the information science nearly ten years in the fields of most rapid . The traditional statistical signal processing has three basic hypothesis: linear, gaussian sex and stability. Modern signal processing is based on the nonlinear, non-gaussian sex and of non-stationary signal analysis and processing as the object. In the modern signal processing, the non-stationary signal processing development especially eye-catching.
幅度调制和频率调制

幅度调制和频率调制幅度调制和频率调制是两种常见的调制方式,它们都是将消息信号和载波信号结合起来,以便在传输过程中更好地传递消息。
在幅度调制中,调制信号控制高频载波的幅度,从而使其随着调制信号的变化而变化。
而在频率调制中,载波的频率随着调制信号的变化而变化,而幅度保持恒定。
在本文中,我们将从多个角度详细讨论幅度调制和频率调制。
调频和调幅的差别在于能够通过调频特有的限幅方法消除产生的寄生调幅,而由于已调幅信号是变化而无法使用限幅。
这意味着调频的抗干扰能力更强于调幅,因为调频可以通过限制幅度的变化来减少噪声的影响。
此外,调频波的频带更宽,调频制功率利用率更大,失真小。
但是,调幅的服务半径相对较小。
调制是将消息信号和载波信号结合起来以便在传输过程中更好地传递消息的过程。
一个信号可以由幅度、频率和相位三个部分组成。
因此,我们可以通过改变载波信号的幅度、频率和相位来将消息信号和载波信号结合起来。
调制可以分为模拟调制和数字调制两种类型。
在模拟调制中,消息信号直接调制在载波上,让载波的特性跟随其幅度进行变化;在数字调制中,调制信号或者消息信号已经不再是模拟形式,而是进行了模数转换,将数字基带信号调制到载波上进行传输。
数字调制的优点包括高抗噪性、高可用带宽和容许功率。
幅度调制可以通过调制信号控制高频载波的幅度来实现。
在幅度调制中,幅度已调信号的幅度随基带信号的规律而成正比地变化。
在频谱结构上,它的频谱完全是基带信号频谱在频域内的简单搬移。
由于这种搬移是线性的,因此幅度调制又称线性调制。
幅度调制是一种非线性的变化过程,因为任何调制过程都是一种非线性的变化过程。
综上所述,幅度调制和频率调制都是将消息信号和载波信号结合起来以便在传输过程中更好地传递消息的过程。
它们的区别在于幅度调制是通过控制高频载波的幅度来实现的,而频率调制是通过控制载波的频率来实现的。
幅度调制可以消除寄生调幅,因此抗干扰能力更强,服务半径相对较小;而频率调制的优点在于波频带更宽,调频制功率利用率更大,失真小。
噪声调幅干扰matlab

噪声调幅干扰matlab噪声调幅干扰(matlab)是指在使用调幅技术传输信息时,由于外部环境的干扰,例如电磁干扰、杂波等,导致接收端收到的信号带有噪声。
这种噪声可能会严重影响信息的传输质量,使得接收端无法正确地解码信息。
因此,如何有效地减小或消除噪声对调幅信号的干扰,成为了一项重要的研究课题。
在matlab上,我们可以使用不同的方法来模拟噪声调幅干扰,以便更好地研究和解决这个问题。
下面,我们将详细介绍几种常见的噪声调幅干扰模拟方法及其解决方案。
1.高斯白噪声干扰模拟高斯白噪声是指在一段时间内,所有频率上的幅度都是随机的,且平均功率密度相等的噪声。
在matlab中,我们可以使用“awgn”函数来生成高斯白噪声。
例如,我们可以使用以下代码生成一个带有高斯白噪声的调幅信号:t = 0:0.001:1; % 生成时间序列fc = 100; % 载波频率Ac = 1; % 载波幅度fs = 1000; % 采样频率Am = 0.5; % 调制信号幅度fm = 10; % 调制信号频率m = Am*cos(2*pi*fm*t); % 生成调制信号c = Ac*cos(2*pi*fc*t); % 生成载波信号s = (1+m).*c; % 生成调幅信号SNR = 5; % 信噪比(dB)s_n = awgn(s, SNR, 'measured'); % 加入高斯白噪声在上述代码中,我们使用“awgn”函数将调幅信号加入高斯白噪声,其中“SNR”是信噪比,用于控制噪声的强度。
在实际应用中,我们可以通过调整信噪比来模拟不同强度的噪声。
为了减小高斯白噪声对调幅信号的干扰,我们可以使用数字滤波器进行滤波。
例如,我们可以使用低通滤波器将高斯白噪声滤除,以获得更清晰的调幅信号。
2.频率干扰模拟频率干扰是指由于外部环境变化等因素导致调幅信号的载波频率发生变化,从而造成接收端无法正确解码的现象。
在matlab中,我们可以使用“fmdemod”函数来模拟频率干扰。
调幅同步广播设备的噪声与失真分析
调幅同步广播设备的噪声与失真分析引言:调幅同步广播设备是广播行业中常见的一种设备,它通过在载波上调制音频信号,实现广播节目的传输。
然而,在实际运行过程中,调幅同步广播设备可能会产生噪声和失真,影响广播质量。
本文将对调幅同步广播设备的噪声和失真进行分析,并提出相应的解决方案。
一、噪声源分析:噪声是指在广播传输中由于各种因素导致的杂散信号。
常见的噪声源包括以下几个方面:1. 环境噪声:广播室周围的环境噪声会对录音质量产生影响。
例如,电子设备产生的电磁辐射、空调设备的噪声等都可能被麦克风捕捉到,并在广播节目中引入噪声。
解决方案:采用合适的噪声抑制技术,如降噪算法和降噪滤波器。
同时,在广播室内合理布置设备,减少环境噪声的干扰。
2. 设备噪声:调幅同步广播设备内部电子元件的噪声是另一个重要的噪声源。
例如,放大器、混频器等元件在工作时会产生热噪声、量化噪声等。
解决方案:选用质量较高的设备元件,并进行合适的屏蔽和隔离措施,以降低噪声干扰。
3. 信号源噪声:信号源本身存在的噪声也会对广播质量产生影响。
例如,录制时使用的麦克风、音频接口等设备可能引入噪声。
解决方案:使用质量较高的麦克风,并在信号源接口处进行适当的隔离和滤波处理,以减少噪声的影响。
二、失真源分析:失真是指通过调幅同步广播设备传输的广播节目与原始音频信号存在的差异,常见的失真源如下:1. 频率失真:调幅同步广播设备可能在调制过程中引入频率失真,即原始音频信号中各个频率成分的相对振幅发生变化。
解决方案:优化调幅同步广播设备的调制算法,确保广播节目中各频率成分的振幅比较准确。
2. 相位失真:调幅同步广播设备的非线性特性可能导致相位失真,即原始音频信号中各个相位的差异被改变。
解决方案:通过设计合理的调幅同步广播设备电路,减少非线性特性对相位的影响,从而减小相位失真。
3. 噪声失真:前文提到的噪声源也可能导致广播节目中的噪声失真。
噪声失真是指噪声在广播节目中传输过程中的变化和扩散。
噪声调幅与调频干扰信号仿真分析
噪声调幅与调频干扰信号仿真分析一、噪声调幅干扰信号时域表达式和功率谱仿真分析噪声调幅干扰信号的时域表达式为:[][]ϕω++=t t U U t U j n j cos )()(0其中,调制噪声)(t U n 为零均值,方差为2n σ,在区间[]∞-,0U 分布的广义平稳随机过程,ϕ为[]π2,0均匀分布,且为与)(t U n 独立的随机变量,0U ,j ω为常数。
噪声调幅定理:[]τωττj n j B U B cos )(21)(20+=式中,)(t B n 为调制噪声)(t U n 的相关函数。
噪声调幅信号的总功率为:22)0(212)0(22020n n j t U B U B P σ+=+==它等于载波功率(2/20U )与调制噪声功率(2n σ)一半的和。
其又可改写为:)1(12202020Ae n t m P U U P +=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+=σ 式中,2/200U P =,为载波功率;0/U m n Ae σ=,为有效调制系数。
噪声调幅信号的功率谱可由噪声调幅定理经傅立叶变换求得:)(41)(41)(22cos )(4)(200j n j n j j j f f G f f G f f U d f B f G -+-+-==⎰∞δττπτ式中,)(f G n 为调制噪声的功率谱,第一项代表载波的功率谱,后两项代表调制噪声功率谱的对称平移。
用MATLAB 仿真分析: 程序:%噪声调幅干扰function y=noiseAM(u0,N,wpp);if nargin==0 wpp=0;u0=1; endfj=35e6;fs=4*fj; Tr=520e-6; t1=0:1/fs:3*Tr-1/fs; N=length(t1); u=wgn(1,N,wpp);df1=fs/N;n=0:N/2;f=n*df1; wp=10e6; ws=14e6; rp=1; rs=60;[n1,wn1]=buttord(wp/(fs/2),ws/(fs/2),rp,rs); [b,a]=butter(n1,wn1); u1=filter(b,a,u);p=0.1503*mean((u1.^2)) ; figuresubplot(2,2,1),plot(t1,u1),title('噪声调制波形'); axis([0,0.05e-4,-2,2]) subplot(2,2,2), j2=fft(u1);plot(f,10*log10(abs(j2(n+1)*2/N))) title('调制噪声功率谱'); rand('state', 0);y=(u0+u1).*cos(2*pi*fj*t1+2); p=(1/N)*sum(y.^2);subplot(2,2,3), plot(t1,y),title('噪声调幅干扰时域波形'); axis([0,0.05e-4,-2,2]) subplot(2,2,4), J=fft(y);plot(f,10*log10(abs(J(n+1)))) title('已调波功率谱');结果:二、噪声调幅干扰信号时域表达式和功率谱仿真分析噪声调频干扰信号的时域表达式为:])(2cos[)(0ϕπω+''+=⎰t d t u K t U t U tFM j j j其中,调制噪声)(t u 为零均值、广义平稳的随机过程,ϕ为[]π2,0均匀分布,且与)(t u 相互独立的随机变量,j U 为噪声调频信号的幅度,j ω为噪声调频信号的中心频率,FM K 为调频斜率。
描述调幅、调频、调相的区别。
描述调幅、调频、调相的区别。
调幅(Amplitude Modulation,AM)、调频(Frequency Modulation,FM)和调相(Phase Modulation,PM)是三种常见的模拟调制技术,用于在无线通信中将信息信号转换成无线信号的形式以便传输。
它们之间的区别主要体现在调制参数的不同以及对信号特性的影响上。
调幅是一种将基带信号的幅度变化转换为载波信号的幅度变化的调制技术。
在调幅过程中,信号的幅度被调制到载波上,使得载波的振幅随着信号的变化而变化。
调幅的特点是简单易实现,但对于噪声和干扰比较敏感。
调幅的解调过程是通过检测载波的幅度变化来恢复原始信号。
调频是一种将基带信号的频率变化转换为载波信号的频率变化的调制技术。
在调频过程中,信号的频率被调制到载波上,使得载波的频率随着信号的变化而变化。
调频的特点是抗干扰性能较好,信号传输质量稳定,在广播电台和移动通信等领域得到广泛应用。
调频的解调过程是通过检测载波频率的变化来恢复原始信号。
调相是一种将基带信号的相位变化转换为载波信号的相位变化的调制技术。
在调相过程中,信号的相位被调制到载波上,使得载波的相位随着信号的变化而变化。
调相的特点是对干扰和噪声比较敏感,但在一些特定的应用场景下,如雷达、无线电导航等,调相技术具有独特的优势。
调相的解调过程是通过检测载波相位的变化来恢复原始信号。
总结起来,调幅、调频和调相是三种常见的模拟调制技术,它们分别通过改变载波的幅度、频率和相位来实现对基带信号的调制。
它们的选择取决于具体的应用需求和信号特性要求。
调幅简单易实现,但对干扰和噪声敏感;调频抗干扰性能较好,传输质量稳定;调相在特定应用场景下具有优势。
了解它们的区别和特点有助于我们在实际应用中选择合适的调制技术,以实现高质量的信号传输。
典型压制性干扰的建模与仿真
T ea a s n i ua o f y ia cieba k t a n h nl i a dsm lt no pcl t l e jmmig ys i t a v n
一
2 噪声调制干扰 的数学模型
以下将重点讨论噪声调幅以及调频干扰 的频谱以
及功率特性 。
般采用射频噪声通过选取适 当参数来实现三种
干扰模式。但在实际过程中 , 半导体器件产生 的射频 2 1 噪声调幅干扰信号分析 . 噪声调幅波数学表达式为 噪声通常功率电平太低 , 难以满足大功率 干扰宽频带
Ab ta t T et e rt a n lssi d n h te t a d l r ie o y ia a s sr c : h h oei la ay i sma ea d temwo l
作者简介: 胡修林 , , 4 年生。 男 1 5 9 教授, 博士生导师 , 从事通信与信息系统方的研究与教学。
维普资讯
胡修林 等 典型压制性干扰的建模与仿真
数为
B M )= ( ) ( ) ^( t t+
指数 , 调制噪声功率越大 , 频带越宽 , 可实现宽带干 () 3
维普资讯
1 0
雷达与对抗
20 06年
第4 期
典 型压制性 干扰 的建模 与仿真
胡修林 , 熊小兰
( 华中科技大学 电子信息与工程系, 湖北 武汉 407 ) 304
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
噪声调幅与调频干扰信号仿真分析
一、噪声调幅干扰信号时域表达式和功率谱仿真分析
噪声调幅干扰信号的时域表达式为:
[][]
ϕω++=t t U U t U j n j cos )()(0
其中,调制噪声)(t U n 为零均值,方差为2n σ,在区间[]∞-,0U 分布的广义平稳随机过程,ϕ为[]π2,0均匀分布,且为与)(t U n 独立的随机变量,0U ,j ω为常数。
噪声调幅定理:
[]
τωττj n j B U B cos )(2
1)(2
0+=
式中,)(t B n 为调制噪声)(t U n 的相关函数。
噪声调幅信号的总功率为:
2
2)0(21
2)0(2
2
02
0n n j t U B U B P σ+=+==
它等于载波功率(2/20U )与调制噪声功率(2n σ)一半的和。
其又可改写为:
)1(122
02020Ae n t m P U U P +=⎥
⎥⎦
⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+=σ 式中,2/200U P =,为载波功率;0/U m n Ae σ=,为有效调制系数。
噪声调幅信号的功率谱可由噪声调幅定理经傅立叶变换求得:
)(4
1)(41)(22cos )(4)(200
j n j n j j j f f G f f G f f U d f B f G -+-+-==⎰∞
δτ
τπτ
式中,)(f G n 为调制噪声的功率谱,第一项代表载波的功率谱,后两项代表调制噪声功率谱的对称平移。
用MATLAB 仿真分析: 程序:
%噪声调幅干扰
function y=noiseAM(u0,N,wpp);
if nargin==0 wpp=0;u0=1; end
fj=35e6;fs=4*fj; Tr=520e-6; t1=0:1/fs:3*Tr-1/fs; N=length(t1); u=wgn(1,N,wpp);
df1=fs/N;n=0:N/2;f=n*df1; wp=10e6; ws=14e6; rp=1; rs=60;
[n1,wn1]=buttord(wp/(fs/2),ws/(fs/2),rp,rs); [b,a]=butter(n1,wn1); u1=filter(b,a,u);
p=0.1503*mean((u1.^2)) ; figure
subplot(2,2,1),plot(t1,u1),title('噪声调制波形'); axis([0,0.05e-4,-2,2]) subplot(2,2,2), j2=fft(u1);plot(f,10*log10(abs(j2(n+1)*2/N))) title('调制噪声功率谱'); rand('state', 0);
y=(u0+u1).*cos(2*pi*fj*t1+2); p=(1/N)*sum(y.^2);
subplot(2,2,3), plot(t1,y),title('噪声调幅干扰时域波形'); axis([0,0.05e-4,-2,2]) subplot(2,2,4), J=fft(y);plot(f,10*log10(abs(J(n+1)))) title('已调波功率谱');
结果:
二、噪声调幅干扰信号时域表达式和功率谱仿真分析
噪声调频干扰信号的时域表达式为:
])(2cos[)(0ϕπω+''+=⎰t d t u K t U t U t
FM j j j
其中,调制噪声)(t u 为零均值、广义平稳的随机过程,ϕ为[]π2,0均匀分布,且与)(t u 相互独立的随机变量,j U 为噪声调频信号的幅度,
j ω为噪声调频信号的中心频率,FM K 为调频斜率。
τωττσj j j e
U B cos 2)(2
)(22-
=
式中,)(2τσ为调幅函数[])()(2t e t e K FM -+τπ的方差,其为
[])()0(24)(2
22τπτσe e FM
B B K -⋅= 式中)(τe B 为)(t e 的自相关函数,它可由调制噪声)(t u 的功率谱)(f G n 变
换求得。
设其具有带限均匀谱,如下式所示:
⎪⎩
⎪
⎨⎧∆≤≤∆=f
F f F f
G n
n
n n 其它00)(2σ
则)(t e 的功率谱)(f G e 为
)()2(1
)(2
f G f f G n e π=
[]⎰
⎰∆Ω∆Ω
Ω
Ω-∆Ω=∆-⋅=-⋅=n
n
d m df f F f K B B K n f
e F n n FM
e e FM
2
2
022
22
2
22cos 12)
2()
2cos 1(24)()0(24)(τπτπσπτπτσ 式中,n n F ∆=∆Ωπ2为调制噪声的谱宽,n de n n FM fe F f F K m ∆=∆=//σ为有效调频指数,其中de f 为有效调频带宽。
噪声调频信号功率谱的表达式为:
⎰⎰⎰
∞+∆Ω-
∞
+⎥⎦
⎤
⎢⎣
⎡
ΩΩ-∆Ω--=-=00
2
222
)
(02cos 1exp )cos()cos()(2n
d m U d
e U G n fe j j j j j τττωωτ
τωωωτσ
当1>>fe m 时,由噪声调频信号功率谱表达式可得:
2
2
2)(2
212
)(de
j f f f de
j j e
f U f G --
=
π
当1<<fe m 时,由噪声调频信号功率谱表达式可得:
22
222)(222)(j n de
m
de j
j f f F
f
F f U f
G -+⎪⎪⎭
⎫ ⎝
⎛∆∆=
π
用MATLAB 仿真分析: 程序:
%噪声调频干扰
function y=noiseFM(uj,mf,wpp);
if nargin==0
uj=1; mf=0.6;
wpp=6;
end
fj=35e6;fs=4*fj;Tr=520e-6;
bj=10e6;
t1=0:1/fs:3*Tr-1/fs; N=length(t1);
u=wgn(1,N,wpp);
df1=fs/N;n=0:N/2;f=n*df1;
wp=10e6;
ws=13e6;
rp=1; rs=60;
[Nn,wn]=buttord(wp/(30e6/2),ws/(30e6/2),rp,rs);
[b,a]=butter(Nn,wn);
u1=filter(b,a,u);
figure
subplot(2,2,1),plot(t1,u1),title('调制噪声波形');axis([0,0.05e-4,-6,6]) subplot(2,2,2),j2=fft(u1); plot(f,10*log10(abs(j2(n+1)*2/N)))
title('调制噪声功率谱');
i=1:N-1;ss=cumsum([0 u1(i)])
ss=ss*Tr/N;
y=uj*cos(2*pi*fj*t1+2*pi*mf*bj*ss+100);
p=(1/N)*sum(y.^2)
subplot(2,2,3), plot(t1,y),title('噪声调频干扰时域波形')
axis([0,0.05e-4,-1.5,1.5])
subplot(2,2,4), J=fft(y); plot(f,(abs(J(n+1))))
title('噪声调频干扰已调波功率谱')
结果:。